辛格方向图模型¶
一、辛格方向图数学模型¶
辛格方向图(Sinc Directional Diagram)模型是电子战仿真中常用的一种天线方向图模型,其数学表达式基于归一化的 sinc 函数,可以用于描述天线的辐射方向性。辛格方向图模型的表达式如下:
其中: - \(G(\theta)\):在方向 \(\theta\) 上的天线增益。 - \(G_{\text{max}}\):最大增益,通常出现在主瓣方向。 - \(\theta\):观察方向与天线主轴之间的夹角。 - \(N\):天线阵列的阵元数。
特性说明:¶
- 主瓣与旁瓣:
- 主瓣是指 \(\theta = 0\) 方向上的主要辐射能量范围,主瓣增益为 \(G_{\text{max}}\)。
-
边旁瓣的幅度由阵元数 \(N\) 决定,\(N\) 越大,旁瓣越小。
-
归一化因子:
-
归一化的 sinc 函数确保方向图的辐射功率在不同方向上的分布符合物理实际。
-
阵列影响:
- 增加阵元数会使主瓣更加集中,旁瓣抑制效果更好。
应用场景:¶
辛格方向图模型广泛用于线性阵列天线、相控阵天线等的仿真,尤其是在电子战、通信和雷达信号处理中,用于评估天线的方向性性能。
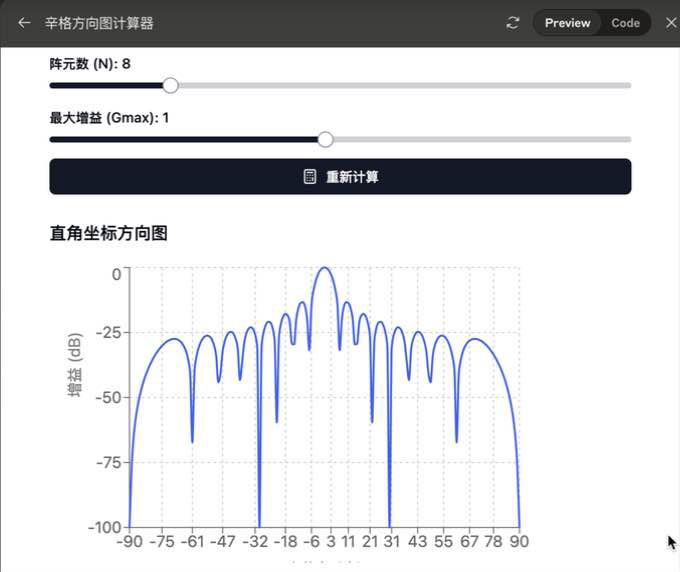
二、测试计算器¶
https://claude.site/artifacts/5f11ccb8-beb2-48a2-8a00-eddd0f871edc
测试计算器代码:
import React, { useState } from 'react';
import { Card, CardHeader, CardTitle, CardContent } from '@/components/ui/card';
import { LineChart, Line, XAxis, YAxis, CartesianGrid, Tooltip, Legend, PolarGrid, PolarAngleAxis, PolarRadiusAxis, RadarChart, Radar } from 'recharts';
import { Slider } from '@/components/ui/slider';
import { Button } from '@/components/ui/button';
import { Label } from '@/components/ui/label';
import { CalculatorIcon } from 'lucide-react';
const SincCalculator = () => {
const [N, setN] = useState(8);
const [tempN, setTempN] = useState(8);
const [Gmax, setGmax] = useState(1);
const [tempGmax, setTempGmax] = useState(1);
const [cartesianData, setCartesianData] = useState([]);
const [polarData, setPolarData] = useState([]);
// 关键方位角定义
const keyAngles = [0, 45, 90, 135, 180, 225, 270, 315];
const calculateGain = (theta, N, Gmax) => {
const thetaRad = (theta * Math.PI) / 180;
const sinTheta = Math.sin(thetaRad);
if (Math.abs(sinTheta) < 1e-10) {
return Gmax;
}
const numerator = Math.sin(N * Math.PI * sinTheta);
const denominator = N * Math.PI * sinTheta;
return Gmax * Math.pow(numerator / denominator, 2);
};
const updateData = () => {
const newCartesianData = [];
const newPolarData = [];
// 更新直角坐标数据
for (let theta = -90; theta <= 90; theta += 1) {
const gain = calculateGain(theta, tempN, tempGmax);
const gainDB = 10 * Math.log10(Math.max(gain, 1e-10));
newCartesianData.push({
theta,
gain: gainDB
});
}
// 更新极坐标数据
for (let theta = 0; theta < 360; theta += 5) {
// 对于大于180度的角度,使用对称性计算
const calcTheta = theta <= 180 ? theta - 90 : 270 - theta;
const gain = calculateGain(calcTheta, tempN, tempGmax);
const gainDB = 10 * Math.log10(Math.max(gain, 1e-10));
const normalizedGain = Math.pow(10, gainDB/20);
newPolarData.push({
theta,
gain: normalizedGain,
gainDB
});
}
setCartesianData(newCartesianData);
setPolarData(newPolarData);
setN(tempN);
setGmax(tempGmax);
};
// 自定义角度轴刻度格式化
const formatPolarAngle = (angleValue) => {
// 只有关键角度才显示标签
if (keyAngles.includes(angleValue)) {
return `${angleValue}°`;
}
return '';
};
return (
<Card className="w-full max-w-4xl p-6">
<CardHeader>
<CardTitle>辛格方向图计算器</CardTitle>
</CardHeader>
<CardContent>
<div className="space-y-6">
{/* 参数控制区 */}
<div className="space-y-4">
<div className="space-y-2">
<Label>阵元数 (N): {tempN}</Label>
<Slider
value={[tempN]}
min={2}
max={32}
step={1}
onValueChange={(value) => setTempN(value[0])}
className="w-full"
/>
</div>
<div className="space-y-2">
<Label>最大增益 (Gmax): {tempGmax}</Label>
<Slider
value={[tempGmax]}
min={0.1}
max={2}
step={0.1}
onValueChange={(value) => setTempGmax(value[0])}
className="w-full"
/>
</div>
<Button
onClick={updateData}
className="w-full"
>
<CalculatorIcon className="w-4 h-4 mr-2" />
重新计算
</Button>
</div>
<div className="grid grid-cols-1 md:grid-cols-2 gap-6">
{/* 直角坐标图 */}
<div className="w-full overflow-x-auto">
<h3 className="text-lg font-medium mb-4">直角坐标方向图</h3>
<LineChart
width={500}
height={300}
data={cartesianData}
margin={{
top: 5,
right: 30,
left: 20,
bottom: 5,
}}
>
<CartesianGrid strokeDasharray="3 3" />
<XAxis
dataKey="theta"
label={{ value: '方位角 (度)', position: 'bottom' }}
/>
<YAxis
label={{
value: '增益 (dB)',
angle: -90,
position: 'insideLeft'
}}
domain={[-40, 0]}
/>
<Tooltip />
<Line
type="monotone"
dataKey="gain"
stroke="#2563eb"
dot={false}
strokeWidth={2}
/>
</LineChart>
</div>
{/* 极坐标图 */}
<div className="w-full overflow-x-auto">
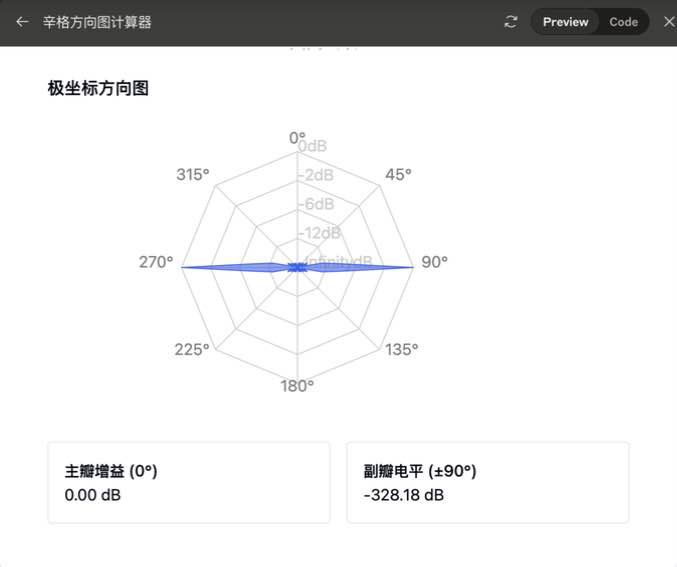
<h3 className="text-lg font-medium mb-4">极坐标方向图</h3>
<RadarChart
width={500}
height={300}
data={polarData}
cx="50%"
cy="50%"
>
<PolarGrid />
<PolarAngleAxis
dataKey="theta"
tickFormatter={formatPolarAngle}
ticks={keyAngles}
/>
<PolarRadiusAxis
angle={90}
domain={[0, 1]}
tickFormatter={(value) => `${(20 * Math.log10(value)).toFixed(0)}dB`}
/>
<Radar
name="增益"
dataKey="gain"
stroke="#2563eb"
fill="#2563eb"
fillOpacity={0.6}
/>
<Tooltip
formatter={(value, name, props) => [
`${(20 * Math.log10(value)).toFixed(2)} dB`,
'增益'
]}
/>
</RadarChart>
</div>
</div>
{/* 关键点数据显示 */}
<div className="grid grid-cols-2 gap-4 mt-4">
<div className="p-4 border rounded">
<h3 className="font-medium">主瓣增益 (0°)</h3>
<p>{(10 * Math.log10(calculateGain(0, N, Gmax))).toFixed(2)} dB</p>
</div>
<div className="p-4 border rounded">
<h3 className="font-medium">副瓣电平 (±90°)</h3>
<p>{(10 * Math.log10(calculateGain(90, N, Gmax))).toFixed(2)} dB</p>
</div>
</div>
</div>
</CardContent>
</Card>
);
};
export default SincCalculator;
三、模型代码¶
Python代码¶
用于测试和可视化辛格方向图模型的代码。这个代码将展示不同阵元数对方向图的影响。
import numpy as np
import matplotlib.pyplot as plt
def calc_sinc_pattern(theta_deg, N, G_max=1.0):
"""
计算辛格方向图模型的增益
参数:
theta_deg: ndarray, 观察角度(度)
N: int, 天线阵元数
G_max: float, 最大增益
返回:
ndarray: 对应角度的增益值
"""
# 将角度转换为弧度
theta_rad = np.deg2rad(theta_deg)
# 避免除零错误
sin_theta = np.sin(theta_rad)
numerator = np.sin(N * np.pi * sin_theta)
denominator = N * np.pi * sin_theta
# 处理 theta = 0 的特殊情况
zero_indices = np.where(np.abs(sin_theta) < 1e-10)
result = np.zeros_like(theta_deg, dtype=float)
# 计算非零角度的增益
nonzero_indices = np.where(np.abs(sin_theta) >= 1e-10)
result[nonzero_indices] = G_max * (numerator[nonzero_indices] / denominator[nonzero_indices]) ** 2
# 设置零角度的增益为最大值
result[zero_indices] = G_max
return result
def plot_pattern(N_values):
"""
绘制不同阵元数的方向图
参数:
N_values: list, 要比较的阵元数列表
"""
# 创建角度数组(-90度到90度)
theta = np.linspace(-90, 90, 1000)
# 设置图形样式
plt.figure(figsize=(12, 8))
plt.grid(True, linestyle='--', alpha=0.7)
# 为每个阵元数绘制方向图
for N in N_values:
gain_db = 10 * np.log10(calc_sinc_pattern(theta, N))
plt.plot(theta, gain_db, label=f'N={N}')
# 设置图形属性
plt.xlabel('方位角 (度)')
plt.ylabel('增益 (dB)')
plt.title('辛格方向图模型 - 不同阵元数比较')
plt.legend()
plt.ylim(-40, 0) # 限制最小增益为-40dB
plt.show()
def test_pattern():
"""
测试函数:验证方向图的关键特性
"""
# 测试不同阵元数和角度的组合
N_test = [4, 8, 16]
theta_test = np.array([0, 30, 60])
print("辛格方向图模型测试结果:")
print("-" * 50)
for N in N_test:
print(f"\n阵元数 N = {N}")
gains = calc_sinc_pattern(theta_test, N)
gains_db = 10 * np.log10(gains)
for theta, gain, gain_db in zip(theta_test, gains, gains_db):
print(f"角度: {theta:3.0f}° | 增益: {gain:.4f} | 增益(dB): {gain_db:.2f} dB")
# 运行测试
if __name__ == "__main__":
# 执行数值测试
test_pattern()
# 绘制不同阵元数的方向图比较
plot_pattern([4, 8, 16])
以上代码实现了以下功能:
calc_sinc_pattern函数:- 实现了辛格方向图的数学模型
- 处理了零角度的特殊情况
-
支持向量化计算,提高效率
-
plot_pattern函数: - 绘制极坐标形式的方向图
- 支持多个阵元数的对比
-
使用 dB 单位显示增益
-
test_pattern函数: - 验证不同角度和阵元数的组合
- 输出详细的测试结果
要运行这个代码,需要安装 NumPy 和 Matplotlib 库。运行后,将看到:
1. 控制台输出:显示不同阵元数和角度组合的具体增益值
2. 图形输出:展示不同阵元数的方向图对比
你可以通过修改 N_values 和测试角度来探索不同的参数组合。需要特别注意的是:
- 增益值已经归一化,最大值为1(0 dB)
- 图表中使用了 dB 单位以better展示旁瓣特性
- 程序处理了 θ = 0° 时的奇异点
C++代码¶
以下为一个易于集成的C++辛格方向图计算模块,包含清晰的输入输出接口。
// SincDirectionalModel.hpp
#ifndef SINC_DIRECTIONAL_MODEL_HPP
#define SINC_DIRECTIONAL_MODEL_HPP
#include <vector>
#include <cmath>
#include <stdexcept>
namespace DirectionalModel {
/**
* @brief 辛格方向图计算模块
* 用于计算和分析天线的辛格方向图特性
*/
class SincDirectionalModel {
public:
/**
* @brief 构造函数
* @param elementCount 天线阵元数
* @param maxGain 最大增益值
* @throw std::invalid_argument 当参数无效时抛出异常
*/
SincDirectionalModel(unsigned int elementCount = 8, double maxGain = 1.0);
/**
* @brief 设置天线阵元数
* @param elementCount 天线阵元数
* @return bool 设置是否成功
*/
bool setElementCount(unsigned int elementCount);
/**
* @brief 设置最大增益
* @param maxGain 最大增益值
* @return bool 设置是否成功
*/
bool setMaxGain(double maxGain);
/**
* @brief 计算指定角度的增益
* @param angle_deg 观察角度(度)
* @return double 增益值
*/
double calculateGain(double angle_deg) const;
/**
* @brief 计算指定角度的分贝增益
* @param angle_deg 观察角度(度)
* @return double 分贝增益值
*/
double calculateGainDB(double angle_deg) const;
/**
* @brief 生成方向图数据点
* @param startAngle 起始角度(度)
* @param endAngle 结束角度(度)
* @param stepSize 角度步长(度)
* @return std::vector<std::pair<double, double>> 角度-增益对
*/
std::vector<std::pair<double, double>> generatePattern(
double startAngle = -90.0,
double endAngle = 90.0,
double stepSize = 1.0) const;
/**
* @brief 生成分贝方向图数据点
* @param startAngle 起始角度(度)
* @param endAngle 结束角度(度)
* @param stepSize 角度步长(度)
* @return std::vector<std::pair<double, double>> 角度-分贝增益对
*/
std::vector<std::pair<double, double>> generatePatternDB(
double startAngle = -90.0,
double endAngle = 90.0,
double stepSize = 1.0) const;
/**
* @brief 获取天线关键参数
* @return std::pair<double, double> 主瓣增益(dB)和第一旁瓣电平(dB)
*/
std::pair<double, double> getKeyParameters() const;
private:
unsigned int N_; // 天线阵元数
double Gmax_; // 最大增益
const double PI = 3.14159265358979323846;
// 检查角度参数是否有效
bool validateAngleParams(double start, double end, double step) const;
};
} // namespace DirectionalModel
#endif // SINC_DIRECTIONAL_MODEL_HPP
// SincDirectionalModel.cpp
#include "SincDirectionalModel.hpp"
namespace DirectionalModel {
SincDirectionalModel::SincDirectionalModel(unsigned int elementCount, double maxGain) {
if (!setElementCount(elementCount) || !setMaxGain(maxGain)) {
throw std::invalid_argument("Invalid constructor parameters");
}
}
bool SincDirectionalModel::setElementCount(unsigned int elementCount) {
if (elementCount < 1) return false;
N_ = elementCount;
return true;
}
bool SincDirectionalModel::setMaxGain(double maxGain) {
if (maxGain <= 0) return false;
Gmax_ = maxGain;
return true;
}
double SincDirectionalModel::calculateGain(double angle_deg) const {
// 转换为弧度
double angle_rad = angle_deg * PI / 180.0;
double sin_theta = std::sin(angle_rad);
// 处理零角度特殊情况
if (std::abs(sin_theta) < 1e-10) {
return Gmax_;
}
double numerator = std::sin(N_ * PI * sin_theta);
double denominator = N_ * PI * sin_theta;
return Gmax_ * std::pow(numerator / denominator, 2);
}
double SincDirectionalModel::calculateGainDB(double angle_deg) const {
double gain = calculateGain(angle_deg);
// 防止取对数时出错,设置最小值
gain = std::max(gain, 1e-10);
return 10.0 * std::log10(gain);
}
bool SincDirectionalModel::validateAngleParams(double start, double end, double step) const {
if (start >= end || step <= 0) return false;
if (std::abs(step) > std::abs(end - start)) return false;
return true;
}
std::vector<std::pair<double, double>> SincDirectionalModel::generatePattern(
double startAngle, double endAngle, double stepSize) const {
if (!validateAngleParams(startAngle, endAngle, stepSize)) {
throw std::invalid_argument("Invalid angle parameters");
}
std::vector<std::pair<double, double>> pattern;
pattern.reserve(static_cast<size_t>((endAngle - startAngle) / stepSize) + 1);
for (double angle = startAngle; angle <= endAngle; angle += stepSize) {
pattern.emplace_back(angle, calculateGain(angle));
}
return pattern;
}
std::vector<std::pair<double, double>> SincDirectionalModel::generatePatternDB(
double startAngle, double endAngle, double stepSize) const {
if (!validateAngleParams(startAngle, endAngle, stepSize)) {
throw std::invalid_argument("Invalid angle parameters");
}
std::vector<std::pair<double, double>> pattern;
pattern.reserve(static_cast<size_t>((endAngle - startAngle) / stepSize) + 1);
for (double angle = startAngle; angle <= endAngle; angle += stepSize) {
pattern.emplace_back(angle, calculateGainDB(angle));
}
return pattern;
}
std::pair<double, double> SincDirectionalModel::getKeyParameters() const {
double mainLobeGainDB = calculateGainDB(0.0);
// 查找第一旁瓣
double firstSidelobeLevel = -std::numeric_limits<double>::infinity();
double angle = 0.0;
bool foundFirstPeak = false;
while (angle <= 90.0) {
double currentGain = calculateGainDB(angle);
double nextGain = calculateGainDB(angle + 0.1);
if (currentGain > nextGain && foundFirstPeak) {
firstSidelobeLevel = currentGain;
break;
}
if (currentGain < nextGain) {
foundFirstPeak = true;
}
angle += 0.1;
}
return {mainLobeGainDB, firstSidelobeLevel};
}
} // namespace DirectionalModel
这个模块提供了以下主要功能:
- 类接口设计:
- 清晰的构造函数和设置函数
- 完整的错误检查和异常处理
-
命名空间封装
-
核心功能:
calculateGain: 计算指定角度的增益calculateGainDB: 计算分贝形式的增益generatePattern: 生成方向图数据点-
generatePatternDB: 生成分贝形式的方向图数据点 -
辅助功能:
getKeyParameters: 获取主瓣增益和第一旁瓣电平- 参数验证和错误处理
使用示例:
#include "SincDirectionalModel.hpp"
#include <iostream>
int main() {
try {
// 创建模型实例:8个阵元,最大增益1.0
DirectionalModel::SincDirectionalModel model(8, 1.0);
// 计算单点增益
double gain_0deg = model.calculateGainDB(0.0);
std::cout << "0度增益: " << gain_0deg << " dB\n";
// 生成方向图数据
auto pattern = model.generatePatternDB(-90.0, 90.0, 1.0);
// 获取关键参数
auto [mainLobe, sidelobe] = model.getKeyParameters();
std::cout << "主瓣增益: " << mainLobe << " dB\n";
std::cout << "第一旁瓣电平: " << sidelobe << " dB\n";
} catch (const std::exception& e) {
std::cerr << "Error: " << e.what() << std::endl;
return 1;
}
return 0;
}
集成建议:
- 将头文件和源文件添加到项目中
- 包含头文件并使用
DirectionalModel命名空间 - 根据需要调用相应的方法
- 注意处理可能的异常