10. 诱饵¶
随着制导武器的复杂性不断提高,特别是“跟踪干扰源”(home-on-jam)模式得到更广泛的使用,雷达诱饵的重要性也随之增加。本章将讨论各种类型的诱饵、它们在军事资产防护中的应用,以及其部署所采用的策略。
10.1 诱饵的类型¶
诱饵可以根据其投入使用的方式、与威胁交互的方式,或所保护的平台类型进行分类;每一类都有大量术语。为了在接下来的几节中建立一个通用的词汇体系,我们将诱饵类型定义为其部署方式,诱饵任务定义为其保护目标的方式,而平台则是被保护的军事载体。表10.1可能会引发争议,因为几乎任何类型的诱饵都可以用于任何类型的任务来保护任何一种平台。如果目前还没有实现,那么很可能在不久的将来会出现。目前文献中所描述的雷达诱饵仅限于飞机和舰船的防护。随着毫米波雷达制导弹药的出现,对地面机动目标构成威胁,诱饵也可能承担地面车辆的防护角色。
表10.1 各类诱饵通常对应的任务与平台
| 诱饵类型 | 任务 | 被保护平台 |
|---|---|---|
| 消耗型 | 引诱 | 飞机 舰船 |
| 饱和 | 飞机 舰船 | |
| 拖曳型 | 引诱 | 飞机 |
| 独立机动 | 侦测 | 飞机 舰船 |
因此,表10.1代表了当前电子战专业文献中所描述的主要重点。
我们将诱饵类型分为消耗型、拖曳型和“独立机动”三类。消耗型诱饵通过吊舱抛射、导弹发射(飞机),或通过发射管、火箭发射器(舰船)释放。这些诱饵通常工作时间较短(在空中持续几秒,在水中持续几分钟)。
拖曳型诱饵通过缆线与飞机相连,可以由飞机控制和/或收放。拖曳型诱饵通常与长时间运行相关。舰船所用的拖曳浮筏配备大型角反射器,也可以视为拖曳型诱饵,但通常单独分类。
独立机动诱饵部署于具备动力的载体上,通常为空中平台。例如无人机诱饵载荷、用于舰船防护的涵道风扇诱饵、安装在直升机上或下方的诱饵。当独立机动诱饵用于保护平台时,它具有完全的相对运动自由度(与必须跟随的拖曳型诱饵或脱离/前射的消耗型诱饵不同)。舰船防护是独立机动诱饵的典型应用,另一典型应用是部署于飞机前方渗透敌方防御,以便规避或实施攻击。
10.1.1 诱饵任务¶
诱饵有三项基本任务:饱和敌方防御,使敌人将攻击从原定目标转移至诱饵,以及通过迫使敌人准备攻击诱饵来暴露其进攻资产。这三种诱饵任务与人类冲突的历史同样古老,远早于电子战的诞生。不同之处在于,现代电子战诱饵欺骗的不是人类战士的感官,而是用于探测、定位目标并引导武器的电子传感器。
10.1.2 饱和诱饵¶
任何武器在同一时间能够攻击的目标数量是有限的。由于传感器和处理器处理每个目标需要有限的时间,这种限制更准确地说是单位时间内可攻击的目标数上限。武器与目标交战的时间段从目标首次被探测到开始,直到目标不再可探测或武器完成任务为止。武器一次只能同时攻击一定数量的目标;如果目标更多,就会有部分目标逃脱攻击,因为武器必须超出饱和点才能继续工作。
大量诱饵可以用来饱和单一武器或武器组合——例如一个防空网络。然而,诱饵还涉及另一变量。通常,武器系统相关的雷达处理能够忽略或迅速丢弃与预期目标回波明显不同的轨迹。因此,诱饵必须在武器系统传感器看来足够像真实目标,才能避免被轻易舍弃。对目标传感器了解越多,诱饵的效果(和成本效益)就越高。理想情况下,诱饵应只具备武器系统传感器可探测的特性;任何额外特性只会增加体积、重量和成本。当一个防空网络处理完图10.1中的所有目标时,真实目标可能已经完成任务,或者已不再易受攻击。
饱和诱饵的一个特殊情况是,当武器系统先获取了诱饵后就停止寻找真实目标(见图10.2)。这在防御主动制导导弹时尤为重要,例如反舰导弹——它们通常在导弹越过地平线后,用狭窄的天线波束搜索目标舰船。
10.1.3 侦测诱饵¶
一种新颖且特别有价值的雷达诱饵用途,是迫使防御系统(如防空网络)开启其雷达,从而使其易于被探测和攻击。这通常需要独立机动诱饵。如果诱饵在外观和行为上足够逼真,获取雷达或其他探测传感器就会将其交给跟踪雷达。一旦跟踪雷达开启,它们就会暴露于敌方武器的攻击,例如由飞机在武器致命范围外发射的反辐射导弹(见图10.3)。

图10.1 饱和诱饵迫使武器传感器处理大量表观目标,降低其攻击真实目标的能力。
10.1.4 引诱诱饵¶
在引诱任务中,诱饵吸引已对目标建立跟踪的雷达,使其转而跟踪诱饵。随后,诱饵远离目标,如图10.4所示。跟踪雷达只考虑方位角(有时包括俯仰角)、距离和回波信号频率的狭窄区段,通过角度、距离和频率门实现。如果诱饵能将这些门移动足够远,使其偏离真实目标,雷达对目标的跟踪锁定就会被打破。因此,我们所称的引诱诱饵也可以称为“脱锁诱饵”。

图10.2 如果武器传感器在探测到真实目标前先获取了诱饵,它可能会攻击诱饵,浪费昂贵的制导导弹。
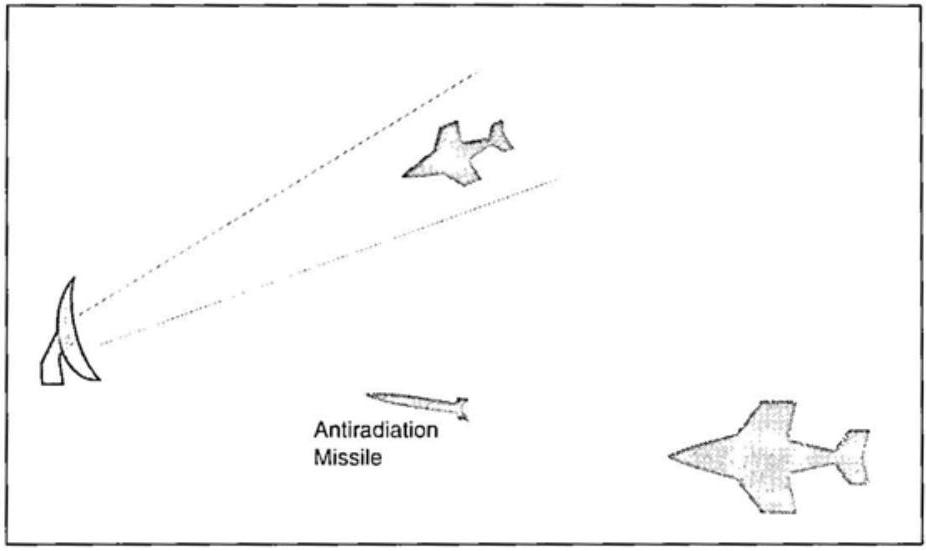
图10.3 如果诱饵迫使防空雷达跟踪它,那么处于武器系统致命范围外的攻击机就能用反辐射导弹攻击它。
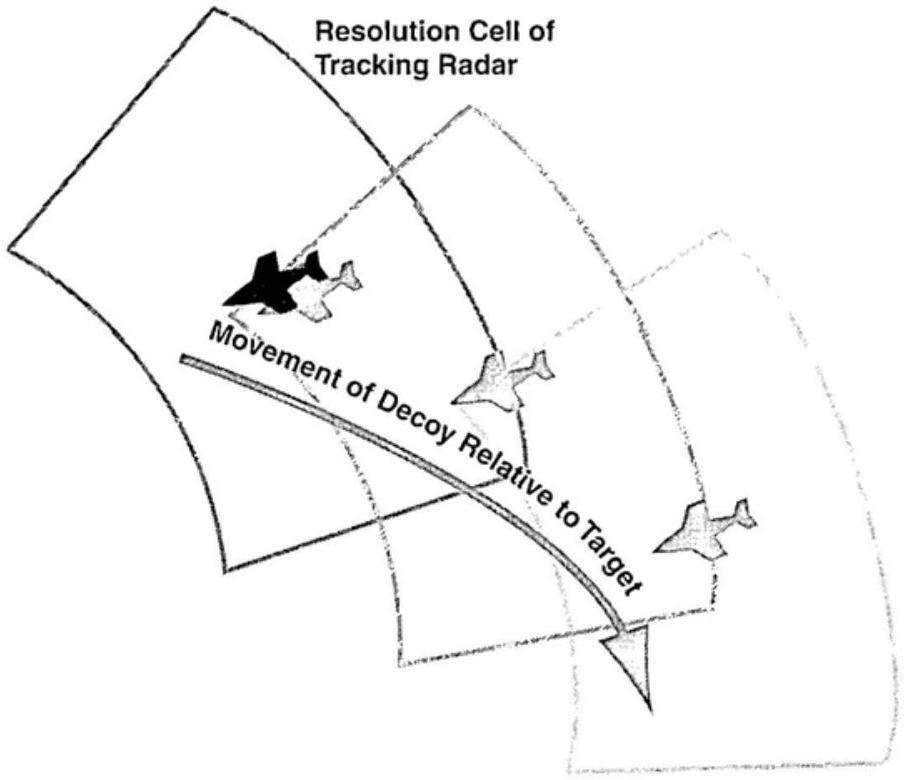
图10.4 在引诱任务中,诱饵在与目标同一雷达分辨单元内启动,但具有较大的表观RCS。它捕获雷达的跟踪门并将其移离目标。
10.2 RCS与反射功率¶
雷达截面积(RCS)是反射雷达信号的等效反射面积。它受反射物体的尺寸、形状、材料和表面粗糙度影响,并随频率和视角而变化。
在电子战中,RCS的重要性在于它对反射信号的影响,因为这直接进入干扰信号与目标信号比(J/S)的信号部分。如图10.5所示,RCS将入射功率转化为反射功率。从“诱饵视角”来看,RCS如图10.6所示。RCS相关的“增益”是两副天线和放大器增益之和——需注意,这些增益可能为正也可能为负(即损耗)。在第2章雷达链路讨论中,目标反射引起的“增益”表达式如下:
其中,\(P_{2}\) 是离开目标的信号功率(dBm),\(P_{1}\) 是到达目标的入射信号功率(dBm),\(\sigma\) 是RCS(\(\mathrm{m}^{2}\)),\(F\) 是信号频率(MHz)。
与所有“dB方程”一样,该表达式需要一些限定条件。首先,要理解\(P_{2}\)和\(P_{1}\)是理想接收机接收的反射功率和入射功率,该接收机使用理想全向天线且非常靠近目标反射点(忽略天线近场效应)。如常见做法,常数(此处为-39)用于处理物理常数与单位换算因子。只有在使用正确单位(此处为dBm、\(\mathrm{m}^{2}\)和MHz)时才有效。
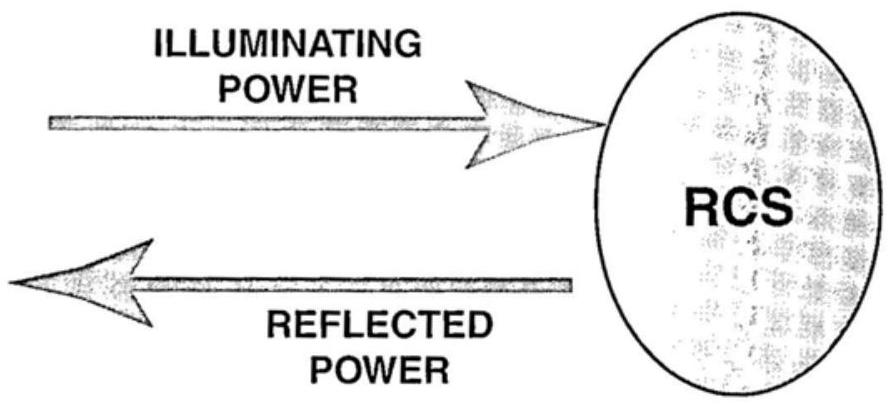
图10.5 RCS决定了目标入射功率与其反射功率之间的比率。
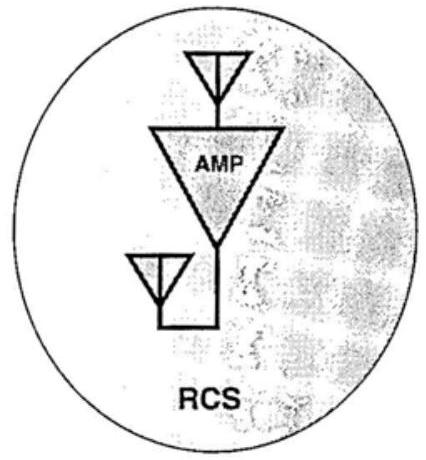
图10.6 无论是目标还是诱饵的RCS,都可以视为放大器和两副天线的组合。RCS引起的有效信号增益是放大器增益与两副天线增益之和。
例如,一个\(10\ \mathrm{GHz}\)信号被\(1\ \mathrm{m}^{2}\)的RCS反射,其反射“增益”为:
不要惊慌,信号在目标反射时并没有真的增强功率。这是理想接收机通过理想全向天线接收到的信号。如果RCS很高,这意味着反射信号能量被有效地聚焦回雷达方向。
作为补充,为帮助理解为何天线是“隐身”平台的难题:如果将\(P_{2}-P_{1}\)替换为天线增益(dB),并将\(\sigma\)替换为天线有效面积(\(\mathrm{m}^{2}\)),就能得到天线尺寸与增益的关系公式。
10.3 无源诱饵¶
无源诱饵只是雷达反射器。它们的RCS取决于尺寸和几何形状,因为材料总是由能够很好反射电磁波的介质构成(通常是金属、金属化织物或金属化玻璃纤维)。每种简单形状都有其特征性的最大RCS。由于角反射器反射效率极高,并能在较宽角度范围内提供高RCS,它常被用于无源诱饵。如图10.7所示,入射信号经三次反射被引导回源方向。现在考虑一个圆柱反射器及其内部可容纳的角反射器的相对RCS,如图10.8所示。为贴近实际,假设角反射器具有四分之一圆弧边。
图10.7 角反射器效率极高,能在宽广角度范围内实现定向反射。
圆柱体的最大RCS由以下公式给出:
其中 \(a\) 为圆柱体半径,\(b\) 为圆柱体长度,\(\lambda\) 为信号波长。为了使\(\sigma\)以\(\mathrm{m}^{2}\)为单位,所有长度必须使用米。
角反射器(四分之一圆弧边)的最大RCS为:
其中 \(L\) 为角反射器四分之一圆弧边的半径。
两者RCS的比值为:
图10.8 将角反射器置于圆柱区域内,其RCS比相同尺寸的圆柱反射器提高了100倍以上。
当 \(b=L=1.5a\) 时,\(\sigma_{CR} / \sigma_{CYL}=3.72 L / \lambda\)。
例如,当 \(L=1 \mathrm{~m}\) 且雷达频率为10 GHz时,角反射器提供的有效截面积几乎是圆柱反射器的75倍,即反射信号功率约高19 dB。
10.4 有源诱饵¶
回顾图10.6,RCS可以被视为两个天线之间加了一个放大器。两个天线与放大器的端到端增益等于目标RCS引起的 \(P_{2}-P_{1}\) 信号增益。
如果使用两个真实天线和一个真实放大器,它们对信号的作用与一个提供相同端到端增益的RCS相同。这实际上就是为什么一个物理尺寸较小的有源诱饵可以模拟一个远大于其物理尺寸的RCS。
在实际中,诱饵可以使用一个“预激发”振荡器,在接收信号的频率上以某一固定大功率输出信号。在这种情况下,当雷达距离目标较远时,有效增益和等效RCS可以非常大。然而,当雷达接近目标时,有效增益(即“RCS”)会下降。
另一种有源诱饵的实现方式是使用“直通中继器”,它对所有接收信号提供固定的增益。因此,当雷达接近目标时,等效RCS保持不变,直到诱饵放大器饱和——之后等效RCS就会像“预激发”振荡器设计一样下降。
一个重要的考虑因素,特别是对物理尺寸较小的诱饵来说,是必须保证两个天线之间有足够隔离,以防止在最大端到端增益下,发射回波信号在接收天线上超过接收信号。
10.5 饱和诱饵¶
饱和诱饵可以是无源的或有源的,但它们必须提供与目标大致相同的RCS。它们还必须具备其他可被雷达探测的特征,并且这些特征必须与目标足够接近,以“欺骗”雷达。这些特征的例子包括运动、喷气发动机调制(如果能被探测到)、以及信号调制。图10.9展示了一个无源干扰诱饵的例子。在这里,箔条云团(提供接近受保护舰船的无源RCS)以某种模式释放,使得攻击雷达控制系统必须将每一个箔条云团都当作目标进行处理。(请注意,这幅图并非按比例绘制;箔条云团的释放范围在实际中会大得多。)

图10.9 一艘舰船处于与其RCS大致相同的箔条云团模式中,会迫使攻击导弹在许多目标中寻找真实目标。舰船在机动且箔条云团随风移动,这使得这一任务更加困难。
10.6 引诱诱饵¶
引诱诱饵之所以得名,是因为它们能将威胁雷达的跟踪机制从预定目标“引诱”走。(你可能没想到会在技术书里遇到性暗示。)诱饵在威胁雷达获取目标后发挥引诱作用。其目的是捕获威胁雷达的跟踪机制并打破其对目标的锁定。它们的功能类似于欺骗式干扰机(例如,距离门拖曳干扰机)。然而,诱饵更强大,因为它能持续吸引威胁雷达的注意,使雷达继续跟踪它。而距离门拖曳干扰机则是将雷达的距离门拖至一个没有目标的位置——使雷达尝试重新获取目标。
诱饵的另一个优势在于其信号从远离目标的位置发出。这能对抗单脉冲雷达和跟踪干扰源模式。
10.6.1 引诱诱饵操作序列¶
如图10.10所示,引诱诱饵必须在威胁雷达跟踪受保护目标后,于其分辨单元内启动。为了有效,诱饵必须以足够的功率返回雷达信号,以模拟一个显著大于受保护目标的RCS。对于有源诱饵(第10.4节),这需要足够的通道增益和最大功率。对于无源诱饵(例如用于舰船防御的箔条云团),有效的诱饵RCS必须大于目标RCS。需要注意的是,目标的RCS高度依赖于其在雷达视角下的方位角和俯仰角,而通过机动来降低目标在攻击雷达中的表观RCS可能是防御策略的一个组成部分。同样值得注意的是,现代“隐身”平台的低RCS,在给定的诱饵RCS下能提供更高水平的防护。
如图10.11所示,诱饵捕获威胁雷达的跟踪机制,使分辨单元在诱饵远离目标时转向并居中于诱饵。在图中,诱饵落在目标之后,但如果诱饵有动力,它也可以向任何方向远离目标。如果引诱成功(图10.12),诱饵会将雷达的分辨单元拉得足够远,使受保护目标完全移出分辨单元。此时,诱饵的有效\(\mathrm{J} / \mathrm{S}\)比为无穷大。
需要强调的是,为了诱饵有效,它必须在威胁雷达看来与目标无法区分。如果威胁雷达测量到诱饵未能产生的回波信号参数,它将忽略诱饵并继续跟踪目标。此类参数的例子包括喷气发动机调制以及与目标尺寸和形状相关的效应。

图10.10 起初,威胁雷达将分辨单元对准目标。引诱诱饵在威胁分辨单元内启动,呈现出显著大于目标的RCS。
图10.11 更大的RCS使威胁雷达的分辨单元跟踪诱饵,而不是目标。
图10.13简化表示了威胁雷达在诱饵操作序列中观测到的RCS。这幅图忽略了目标相对雷达方位变化以及雷达到目标距离变化的几何效应。这两个问题将在下一节中讨论。
图10.12 当威胁雷达的分辨单元被拉得足够远,使目标不再处于其中时,雷达只能看到并跟踪诱饵。
图10.13 更大RCS的引诱诱饵捕获了雷达的跟踪门,使其偏离目标。
10.6.2 舰船防护中的引诱功能¶
箔条云团被用作引诱诱饵,以保护舰船免受雷达制导反舰导弹的攻击。在这种情况下,诱饵与目标的分离仅由舰船运动和风力作用下的箔条云团移动所产生。如图10.14所示,箔条云团理想情况下放置在分辨单元的边角处,这样它能最快速地与舰船分离。云团投放位置根据攻击导弹所用雷达类型、相对风向和风速,以及攻击方向来选择。引诱箔条云团通常投放在靠近舰船的位置,以至于部分箔条会落到舰船甲板上。
10.6.3 倾泻模式诱饵操作¶
另一种对舰船防御重要的诱饵操作模式称为“倾泻模式”。在这种模式下,诱饵(例如箔条云团)被布放在雷达分辨单元之外,如图10.15所示。随后使用欺骗式干扰机(例如距离门拖曳干扰机)将分辨单元从目标处拉到诱饵上,如图10.16所示。只要诱饵产生的RCS与受保护目标相当(且无法区分),雷达就会锁定诱饵。当然,诱饵必须布放在一个不会使攻击导弹意外重新获取舰船的位置。
图10.14 用于引诱模式的箔条云团被布放在分辨单元的边角处,使其最快速地与舰船分离,并引导攻击导弹远离舰船。
图10.15 当舰船防护箔条以倾泻模式使用时,它被布放在威胁雷达分辨单元之外。

图10.16 受保护舰船上的欺骗干扰机将威胁雷达的分辨单元拉到箔条云团上。
10.7 交战过程中的有效RCS¶
诱饵的有效性受到其运行环境的极大影响。由于几乎所有诱饵应用都涉及动态情况,研究诱饵在各种交战场景中的表现是非常有用的。由于涉及舰船对抗反舰导弹攻击的二维交战场景较为简单,我们将以此为例。然而,当考虑合适的交战几何时,相同的原理同样适用于飞机防护。
10.7.1 快速回顾¶
单程链路方程(在第2章讨论过)将接收信号强度定义为发射机有效辐射功率、信号频率以及发射机与接收机之间距离的函数。在忽略大气损耗时,方程为:
其中,\(P_{R}\) = 信号功率(dBm);\(\mathrm{ERP}\) = 发射机有效辐射功率(dBm);\(F\) = 发射信号频率(MHz);\(d\) = 发射机到接收机的距离(km);\(G_{R}\) = 接收天线增益(dB)。
如第10.2节所示,有效增益(相对于各向同性天线向诱饵发射和从诱饵接收)作为RCS和信号频率的函数公式为:
其中,\(G=\) 来自诱饵有效RCS的等效信号增益(dB);\(\sigma=\) 诱饵的有效RCS(\(\mathrm{m}^{2}\));\(F=\) 信号频率(MHz)。
\(10 \log (\sigma)\) 项是以\(1 \mathrm{~m}^{2}\)为参考的RCS(dB),即dBsm。方程可重新写为:
10.7.2 一个简单场景¶
一枚反舰导弹从飞机上发射,朝舰船飞来,并在地平线处(距离舰船约10 km)开启其主动跟踪雷达。舰船的ESM系统已发出攻击即将发生的警告,舰船在自身与导弹之间释放了一枚诱饵。如图10.17所示,诱饵和舰船均处于导弹雷达波束内。假设诱饵成功捕获导弹雷达,并在远离舰船时吸引雷达波束跟随,则舰船会脱离雷达波束,如图10.18所示。

图10.17 导弹主动跟踪雷达、诱饵(D)和目标的交战在雷达开启时开始。诱饵和目标都处于雷达天线波束内。
考虑舰船上ESM接收机观测到的交战情况。如果没有诱饵(或其他电子战)保护,导弹将以接近马赫1的速度直飞舰船,舰船会始终处于导弹雷达波束的中心或附近。ESM系统接收的信号功率随时间的变化如图10.19所示。雷达的ERP是其发射机功率与天线峰值增益之和(dB)。ESM系统天线增益保持不变,频率保持不变。但信号传播距离随着导弹接近而迅速减小,导致\(20 \log (d)\)项迅速变化。此项使得传播损耗与距离平方成函数关系,因此接收信号功率将呈现图10.19所示曲线。
图10.18 如果诱饵捕获了雷达,雷达天线波束会随着导弹跟踪诱饵而偏离目标,诱饵远离目标。

图10.19 在交战过程中,目标接收到的功率等于雷达ERP减去(递减的)传播损耗。
幸运的是,诱饵捕获了雷达并使其天线波束偏离舰船。当舰船脱离雷达主波束时,雷达在舰船方向上的ERP会急剧下降,如图10.20所示。顺便提一句,如果诱饵没有成功捕获导弹雷达,而是它自己脱离天线波束,那么它将看到与舰船相同的信号历史。
10.7.3 场景中的诱饵RCS¶
有源诱饵的有效RCS取决于其增益和最大输出功率。如图10.21所示,恒定增益诱饵产生的RCS(dBsm)为\(39+\) 增益\((\mathrm{dB})-20 \log (F)\)(MHz),直到导弹足够接近,使得诱饵接收到的信号等于最大输出功率减去诱饵增益。此后,每当接收信号功率增加1 dB,有效RCS就减少1 dB。
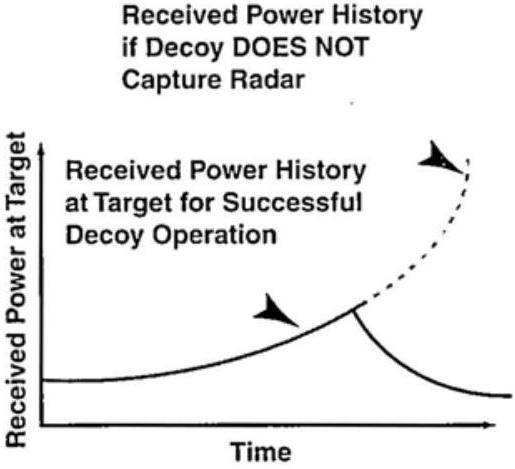
图10.20 如果诱饵捕获导弹雷达,目标上的信号功率会随着其脱离雷达天线波束而下降。
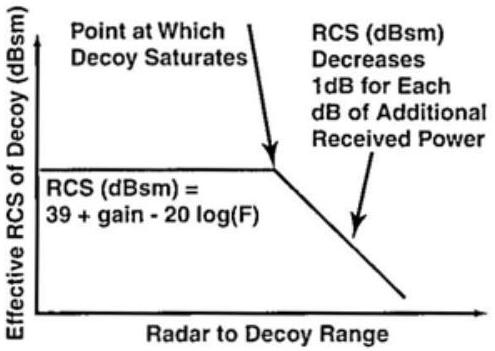
图10.21 诱饵的有效雷达截面积取决于其增益和最大输出功率。
预激发振荡器诱饵始终以最大功率发射,而不论接收信号功率大小,因此当接收到非常弱的雷达信号(即远距离)时,接收信号与发射信号的差值极大。实际上,诱饵具有巨大的增益,从而产生极大的有效RCS。
图10.22给出了一些数值。考虑一个有源诱饵,增益\(80 \mathrm{~dB}\),最大输出功率100 W,对抗一部\(10 \mathrm{~GHz}\)、ERP为100 kW的雷达(取整值,若与实际设备相似纯属巧合)。图中虚线曲线表示诱饵有效RCS随与雷达距离变化的情况。在其线性增益区间内,诱饵产生的RCS(dBsm)为:
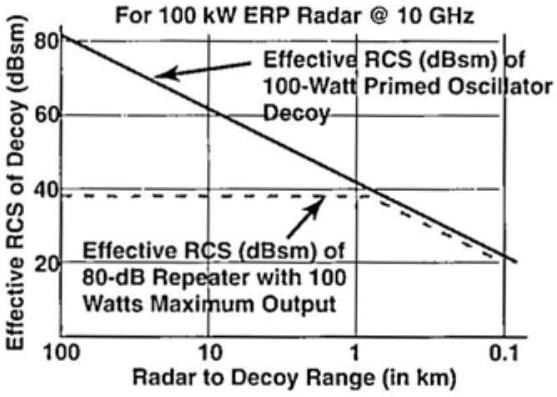
图10.22 预激发振荡器诱饵的有效RCS随雷达到诱饵距离变化。对于固定增益诱饵,RCS保持恒定,直到诱饵饱和。
当诱饵接收到的雷达信号为 \(100 \mathrm{~W}-80 \mathrm{~dB}(+50 \mathrm{dBm}-80 \mathrm{~dB}=-30 \mathrm{dBm})\) 时,其RCS开始下降。这发生在ERP满足如下关系时:
(假设接收天线增益为 \(0 \mathrm{~dB}\))。代入数值并整理方程可得:
因此 \(d=10^{(-2 / 20)}=0.794 \mathrm{~km}\),约794米。
如果诱饵是预激发振荡器,总是在最大功率下工作,并且具有足够灵敏度在任何适当距离接收信号,那么其有效RCS将与图中实线相符。为了计算10 km处的有效RCS,先计算该距离下的接收信号强度:
由于诱饵输出100 W,有效增益为 \(+50 \mathrm{dBm}-(-52 \mathrm{dBm})=102 \mathrm{~dB}\)。由此有效RCS(dBsm)为:
这相当于超过100万\(\mathrm{m}^{2}\)。