11. 电磁支援与信号情报¶
11.1 引言¶
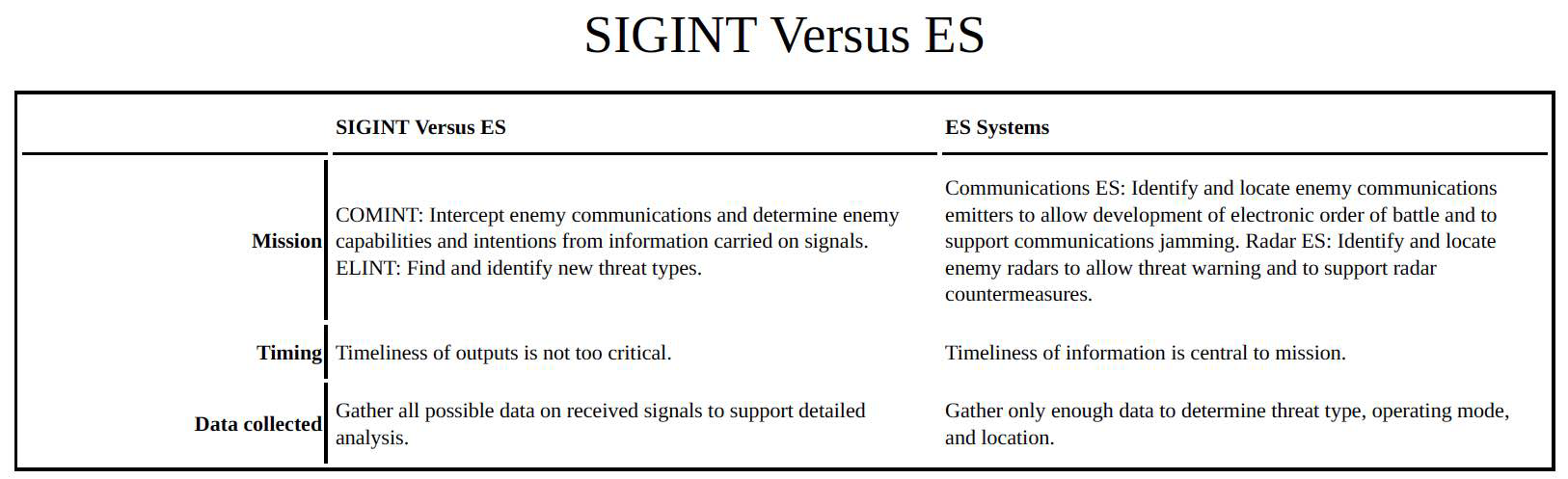
本章将讨论电磁支援(ES)系统与信号情报(SIGINT)系统之间的区别,这两类系统都是为了接收敌方信号而设计的。SIGINT 与 ES 的差异在于接收这些信号的目的,如表 11.1 所总结的。此外,这些系统所处的典型环境也存在一些技术差异,这些差异会影响系统设计方法以及系统硬件和软件的选择。
11.2 信号情报(SIGINT)¶
SIGINT 是从接收到的信号中开发具有军事意义的信息。它通常被划分为通信情报(COMINT)和电子情报(ELINT),如图 11.1 所示。每个子领域在某种程度上与 ES 相关,如图 11.2 所示。ES 通常被划分为通信 ES 和雷达 ES,如图 11.2 所示。通信和雷达信号的特性决定了这两个子领域任务上的差异。下列章节将重点讨论处理每种类型信号的系统,并区分情报与 ES 的角色。
表 11.1 SIGINT 与 ES 对比
(中文参照)
| SIGINT 与 ES | ES 系统 | |
|---|---|---|
| 任务 | COMINT:截获敌方通信,并从信号所携带的信息中判断敌方能力与意图。ELINT:发现并识别新的威胁类型。 | 通信ES:识别并定位敌方通信辐射源,以便形成电子战序列并支援通信干扰。雷达ES:识别并定位敌方雷达,以便提供威胁预警并支援雷达对抗措施。 |
| 时间性 | 输出的及时性要求不高。 | 信息的及时性是任务的核心。 |
| 收集数据 | 尽可能收集接收信号的全部数据以支持详细分析。 | 只收集足以判定威胁类型、工作模式和位置的数据。 |
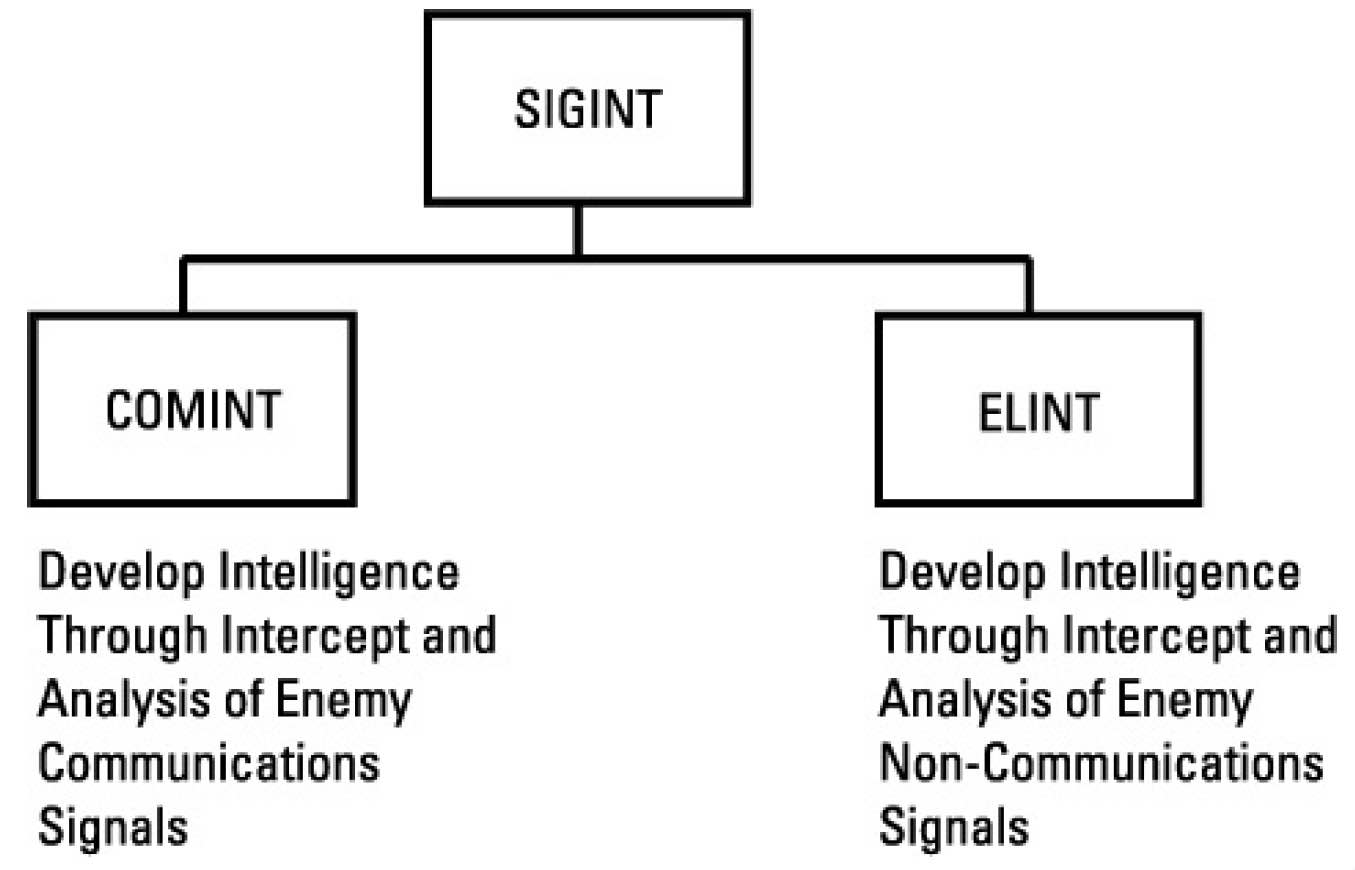
图 11.1 SIGINT 包括 COMINT 和 ELINT,用于从敌方通信和非通信信号中开发情报。
- COMINT:通过截获和分析敌方通信信号来获取情报
- ELINT:通过截获和分析敌方非通信信号来获取情报
11.2.1 COMINT 与通信 ES¶
图 11.3 为 COMINT 与通信 ES 系统之间关系的流程图。
COMINT 的字典定义为“通过截获有线或无线通信来收集情报。”基本上,这就是监听敌方的通信内容,以判断其能力、部队结构及意图。这意味着 COMINT 系统处理的是敌方信号中承载的信息(即调制内容)。由于军事通信的特性,重要信号通常是加密的,并且当然使用敌方语言。
信号的解密和翻译会延迟所获取信息的可用性。因此,COMINT 更适用于战略和高级战术决策,而不是立即战术响应的判断。

图 11.2 ES 包括通信 ES 和雷达 ES,两者都提供关于当前敌方发射源的情报,以支持电子作战和武器交战。
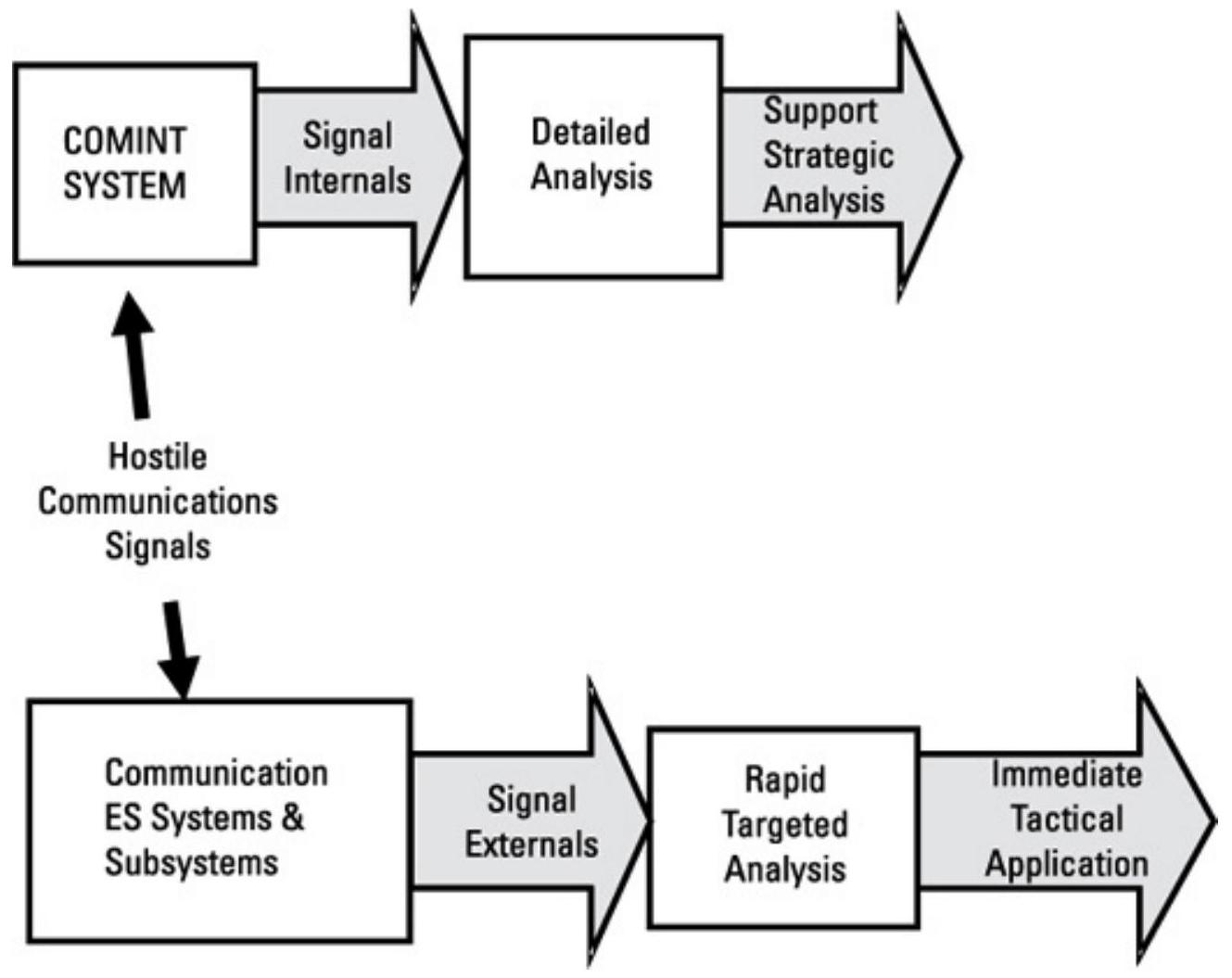
图 11.3 COMINT 经典上处理信号内部内容以支持战略行动;通信 ES 处理信号外部特性以支持即时战术决策。
通信 ES 聚焦于通信信号的外部特性:调制类型和水平,以及发射器的位置。它通过确定敌方发射器的类型和位置来支持对当前情况的战术响应。通过将所有类型的发射器与敌方各组织使用的发射器类型进行建模,可以估算敌方的部队结构。观测到的发射器的位置及其历史位置可以用来推断敌方部队的位置和移动情况。发射器的整体布置被称为电子兵力部署(EOB),可以分析以确定敌方能力,甚至其意图。
总之,COMINT 通过监听通信内容(即信号内部)来判断敌方的能力和意图,而通信 ES 则通过分析信号外部特性来判断敌方的能力和意图。
11.2.2 ELINT 与雷达 ES¶
ELINT 涉及对非通信信号的拦截和分析,主要来自雷达。ELINT 的目的是确定新遇到的敌方雷达的能力和弱点。如图 11.4 所示,ELINT 系统收集足够的数据以支持详细分析。当接收到一种新的雷达信号类型时,首先要做的任务是确定接收到的信号是否确实是一种新的威胁。还有另外两种可能性:它可能是一个老旧的威胁雷达出现故障,或者拦截系统存在问题。如果接收到的信号是新型雷达或新的操作模式,详细分析将允许对 ES 系统进行修改,使其能够识别这种新的威胁类型。
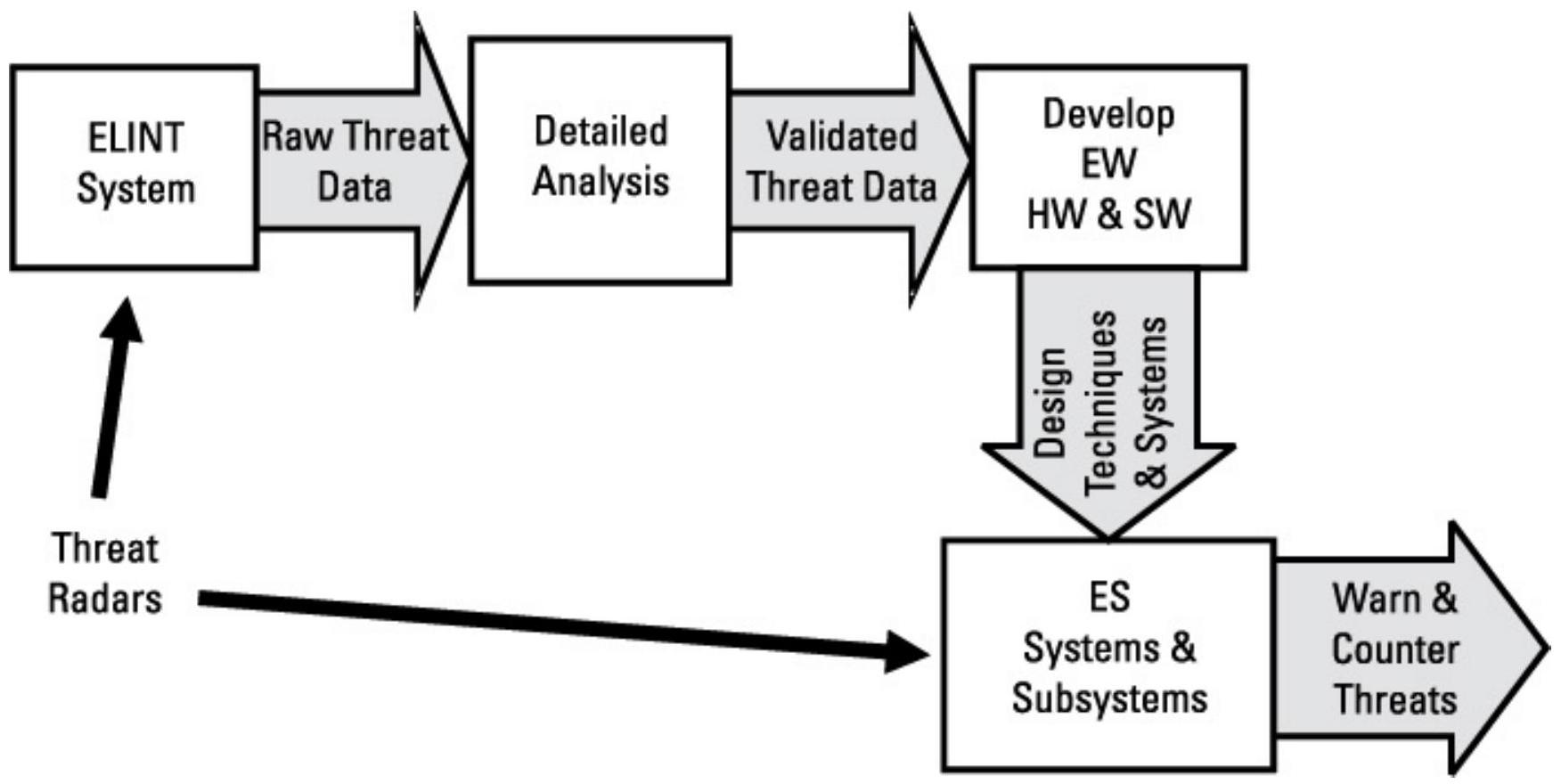
图 11.4 ELINT 系统收集威胁数据,以支持 ES 系统及其子系统的发展,用于威胁预警和对策选择。
雷达 ES 系统同样接收敌方雷达信号,但其目的是快速确定敌方已知武器中哪一种正在针对目标部署。在完成威胁类型和模式识别后,这些信息会与威胁发射源的位置一起显示给操作员,或传递给其他电子战系统或子系统以支持对策启动。如果接收到不熟悉类型的信号,则被视为未知。在一些 ES 系统中,操作员仅被通知接收到未知威胁。然而在其他系统中,会尝试猜测威胁类型。在一些 ES 系统中,未知威胁会被记录以供后续分析。
总之,ELINT 确定敌方拥有什么能力,而雷达 ES 确定敌方的哪一台雷达正在使用以及发射源的位置(从而确定它所控制的武器的位置)。
11.3 天线与探测距离的考虑¶
ES 系统与 SIGINT 系统在技术上存在一些差异,这些差异由任务和环境因素决定。这些差异涉及预期的拦截几何形状、从拦截到的敌方信号中提取的不同信息类型,以及拦截的时间紧迫性。
11.4 天线问题¶
天线可以分为定向或非定向。这是一种极度简化的描述。像鞭状天线和偶极子天线有时被(错误地)描述为全向天线。这是不正确的,因为这两种天线类型在其覆盖范围内都有零点。然而,如果两种天线垂直放置,它们都能提供 \(360^{\circ}\) 的方位覆盖。还有一些由定向天线组成的圆形阵列,也可以提供完整的方位覆盖。定向天线(包括但不限于抛物面天线、相控阵天线或对数周期天线)将其覆盖范围限制在较小的角度扇区内。
角度覆盖对拦截未知入射方向的敌方信号的概率有显著影响。如图 11.5 所示,\(360^{\circ}\) 覆盖天线(或天线阵列)能够随时“观察”所有方向,因此能在信号出现时立即输入到接收机。定向天线必须扫描到新信号的到达方向才能接收。如果敌方信号存在的时间有限,拦截概率将取决于天线的波束宽度和扫描速率。为了发生拦截,天线必须移动,将信号的入射方向置于天线波束覆盖区域内。

图 11.5 像偶极子或鞭状天线的 \(360^{\circ}\) 天线可提供所有方位的 \(100 \%\) 覆盖,而窄波束天线必须扫描到正确的入射方向。
如图 11.6 所示,波束宽度决定了天线覆盖的可能入射角百分比。使用图中的这部分时,从波束宽度向上画一条直线到实线,然后向右画到右侧纵坐标值。这只考虑了一个搜索维度(例如方位搜索);二维搜索则要困难得多。在同一图中,扫描天线在信号入射角(仅方位)上的停留时间显示为各种圆形扫描周期下的波束宽度函数。使用图中这部分时,从波束宽度向上画直线到所选扫描周期的虚线,再向左画到左侧纵坐标值。需要注意的是,在天线指向每个可能入射角期间,必须进行频率搜索。天线波束越窄,为允许频率搜索,接收天线的扫描速度就必须越慢。因此,寻找未知频率和入射角的感兴趣信号所需的时间会更长。频率搜索将在第 11.5 节的接收机类型上下文中讨论。
通常,SIGINT 拦截的时间紧迫性低于 ES 拦截。因此,由于扫描窄波束天线而导致的拦截延迟可能是可以接受的。然而,由于 ES 系统通常必须在几秒钟内拦截敌方信号,因此通常需要宽覆盖天线或天线阵列。
图 11.6 天线波束内的角度空间百分比与波束宽度成反比,信号入射角上的停留时间亦然。
如图 11.7 所示,天线半功率(\(3-\mathrm{dB}\))波束宽度与天线增益之间存在权衡关系。此图针对 \(55\%\) 效率的抛物面天线,但这种权衡适用于所有类型的窄波束天线。接收天线增益是拦截敌方信号距离的重要考虑因素,如下文所述。
图 11.7 窄波束天线的增益与波束宽度成反比。
这意味着,ES 系统几乎总是需要宽覆盖(因此增益低)天线,而 SIGINT 系统则可能更适合使用窄波束(因此增益高)天线。
11.5 拦截距离考虑¶
图 11.8 显示了 ES 或 SIGINT 系统的拦截情况。注意,接收系统能够拦截敌方信号的距离取决于目标信号的有效辐射功率、适用的传播模式、接收天线在发射方向上的增益以及接收系统的灵敏度。传播模式在第 5 章中有详细讨论。
雷达和数据链信号通常以视距方式传播。在此模式下,拦截距离由下式给出:
其中 \(R_{I}\) 为拦截距离(公里),\(E R P_{T}\) 为目标发射机的有效辐射功率(dBm),\(F\) 为发射信号频率,\(G_{R}\) 为接收天线在目标发射方向上的增益,\(S\) 为接收机系统灵敏度(dBm)。
通信信号将根据链路距离、天线高度和频率以视距或双程传播模式传播。如果采用双程传播模式,拦截距离由下式给出:
图 11.8 接收系统能够拦截敌方发射信号的距离是天线增益和接收系统灵敏度的函数。
其中 \(R_{I}\) 为拦截距离(公里),\(E R P_{T}\) 为目标发射机的有效辐射功率(dBm),\(h_{T}\) 为发射天线高度(米),\(h_{R}\) 为接收天线高度(米),\(G_{R}\) 为接收天线在目标发射方向上的增益,\(S\) 为接收系统灵敏度(dBm)。
由这些公式可见,拦截距离始终受到接收天线增益和接收系统灵敏度的影响。注意,灵敏度是成功拦截所需的信号强度。接收系统的灵敏度越高,该值就越低。例如,高灵敏度接收机的灵敏度可能为 -120 dBm,而低灵敏度接收机可能为 -50 dBm。
目标发射机的有效辐射功率(ERP)是它在拦截接收机方向上发射的功率。战术通信威胁通常具有 \(360^{\circ}\) 天线,方位增益相对恒定;ERP 是发射功率(dBm)与天线增益(dB)的和。然而,雷达威胁预计将使用窄波束天线。如图 11.9 所示,窄波束天线具有主瓣和旁瓣。旁瓣在图中简化为强度相同;实际天线旁瓣会有所不同。然而,该图是现实的,因为主瓣之间的零点远窄于主瓣。这意味着,指向雷达威胁发射器但偏离主波束方向的拦截接收机,通常会遇到平均旁瓣水平的 ERP。该水平通常表示为:\(S/L=-N~\mathrm{dB}\),其中 \(N\) 为平均旁瓣电平低于轴向增益的分贝数。
虽然并非总是如此,但 ES 系统通常被指定为接收雷达威胁的主瓣信号,而 ELINT 系统则通常被指定为拦截目标雷达发射器的旁瓣信号。这意味着,ES 系统通常所需的灵敏度和/或接收天线增益低于 ELINT 系统。

图 11.9 雷达 ESM 系统通常被描述为接收威胁雷达天线的轴向信号,而 ELINT 系统通常被描述为接收平均旁瓣电平信号。
一般认为,SIGINT 系统比 ES 系统需要更大的拦截距离;然而,像所有一般性说法一样,这取决于具体任务和情况。如果认为 SIGINT 系统需要更大拦截距离,则接收天线增益和/或灵敏度必须高于 ES 系统。窄波束天线增益较高,但在短时间内拦截概率降低,因此更适合 SIGINT 应用。全覆盖天线虽然增益较低,但能在短时间内提供更高的拦截概率,因此通常最适合 ES 系统。
11.6 接收机考虑¶
接收机问题可以区分 ES 与 SIGINT 系统的要求。像前面讨论的问题一样,这些差异与预期的拦截几何形状、从拦截的敌方信号中提取的不同类型信息以及拦截的时间紧迫性有关。
ES 或 SIGINT 系统都可以使用多种类型的接收机。表 11.2 列出了最常见的接收机类型及其在 ES 或 SIGINT 应用中有用的特性。每种接收机类型在其他书籍中都有详细讨论,例如 [1] 第 4 章。
晶体视频接收机主要用于雷达警告接收系统。它非常适合 ES 应用,因为它覆盖宽的瞬时频率范围,通常为 4 GHz。这使其能够在极短时间内接收任何信号。它通常具有足够宽的带宽来接收非常短的脉冲。然而,其缺点是灵敏度相对较低,无法确定接收信号的频率,也无法在整个带宽内接收多个同时存在的信号。虽然在特殊情况下晶体视频接收机曾用于侦察系统,但几乎总是作为雷达 ES 接收机使用。
表 11.2 接收机类型及特性
| 接收机类型 | 灵敏度 | 动态范围 | 带宽 | 信号数量 | 特性与限制 |
|---|---|---|---|---|---|
| 晶体视频 | 低 | 高 | 宽 | 范围内 1 个 | 仅 AM |
| IFM | 低 | 高 | 宽 | 范围内 1 个 | 仅频率 |
| 超外差 | 高 | 高 | 窄 | 多个中的 1 个 | 可恢复调制 |
| 分通道 | 高 | 高 | 宽 | 多个同时 | 可恢复调制 |
| 布拉格单元 | 低 | 很低 | 宽 | 多个同时 | 仅频率 |
| 压缩接收机 | 高 | 高 | 宽 | 多个同时 | 仅频率 |
| 数字 | 高 | 高 | 灵活 | 多个同时 | 可恢复调制,具独特分析能力 |
瞬时频率测量(IFM)接收机能够在极短时间内(通常 50 ns)快速确定任意接收信号的频率(仅频率),覆盖一个倍频程的带宽。其灵敏度大约与晶体视频接收机相当。其主要缺点是,当其带宽内存在多个功率近似相等的信号时(即同一 50 ns 内),输出无效。由于灵敏度相对较低,它主要用于雷达 ES 系统。
超外差接收机在所有通信应用中被广泛使用。它几乎总是在任何 SIGINT 通信 ES 系统中使用,有时也用于雷达 ES 系统。超外差接收机的主要优点包括:
- 灵敏度良好;
- 能够在信号密集环境下接收单个信号;
- 能够恢复任意类型的调制;
- 可测量接收信号的频率。
超外差接收机的主要缺点是一次只能接收有限的频率范围,因此必须扫描以搜索威胁信号。正如下文所述,灵敏度与寻找未知频率信号所需时间与带宽之间存在权衡。
分通道接收机允许同时恢复多个同时信号。其主要缺点是通道数量多时复杂性大(即体积、功率和重量)。
光电或布拉格单元接收机可在密集环境中确定多个同时信号的频率(仅频率)。其灵敏度合理,但对于 ES 和 SIGINT 应用而言,动态范围极其有限,因此仅在非常有限的应用中有用。
压缩接收机提供多个同时信号的频率(仅频率),具有良好灵敏度,在与超外差接收机结合使用时,对 ES 和 SIGINT 系统均有用,用于处理已识别的感兴趣信号。
数字接收机在许多 ES 和 SIGINT 应用中使用。它们提供良好的灵敏度和动态范围,尽管在模数转换器的技术水平上存在权衡。数字接收机支持独特的分析能力,例如:
- 快速傅里叶变换(FFT)电路可以执行非常快速的频谱分析;
- 可以实现时间压缩算法以检测噪声类信号;
- 可配置以接收任意类型的调制。
灵敏度与带宽¶
接收系统灵敏度(dBm)由下式给出:
其中 \(S\) 为灵敏度(dBm),\(k T B\) 为系统的热噪声(dBm),\(N F\) 为系统在 kTB 之上增加的噪声量(dB),Required RFSNR 为所需的预检波信噪比(dB)。
这是定义接收机接收到足够功率以获得所需输出质量信号的接收功率。灵敏度也可以用最小可识别信号(MDS)表示,其计算方法与上述相同,但 RFSNR 为 0 dB(即接收机系统输入端信号等于噪声)。
由于 kTB 与接收机有效系统带宽相关,图 11.10 可用于根据接收机有效带宽及其噪声系数确定 MDS 灵敏度。使用方法:从横轴的带宽开始,垂直向上至噪声系数,再水平向左至纵轴,即可得到 MDS 灵敏度(dBm)。若要确定完整指定输出性能的灵敏度,只需在 MDS 灵敏度上加上所需的 RFSNR。
11.7 频率搜索问题¶
第 11.3 节讨论了与窄波束天线相关的搜索问题。图 11.6 是一个图表,可用于根据天线波束宽度和扫描速率计算信号驻留时间。现在我们讨论另一个搜索问题,即在频率上寻找未知威胁信号。一个经验法则是,为了检测信号的存在,它必须在接收机带宽内保持的时间等于有效接收机带宽的倒数。例如,一个 1 MHz 带宽的接收机必须在一个频率上驻留 1 μs,然后才能跳到新的频率。
图 11.10 接收系统的 MDS 灵敏度是其有效带宽和噪声系数的函数。
图 11.11 的图表允许根据带宽和待扫描范围确定覆盖给定频率范围所需的时间(在带宽内有足够的驻留时间)。使用方法:从横轴上的接收机带宽向上延伸到待扫描的频率范围,再向左延伸到找到信号所需的总时间。
11.8 处理问题¶
现在考虑可区分 ES 和 SIGINT 系统需求的处理问题。这些差异与必须从感兴趣信号中收集的信息性质以及输出报告的时间紧迫性有关。
也许最重要的问题是区分 ES 和 SIGINT 系统任务的是必须收集的威胁信号数据的性质和数量。
图 11.12 总结了雷达和通信 ES 与 SIGINT 系统的数据需求。
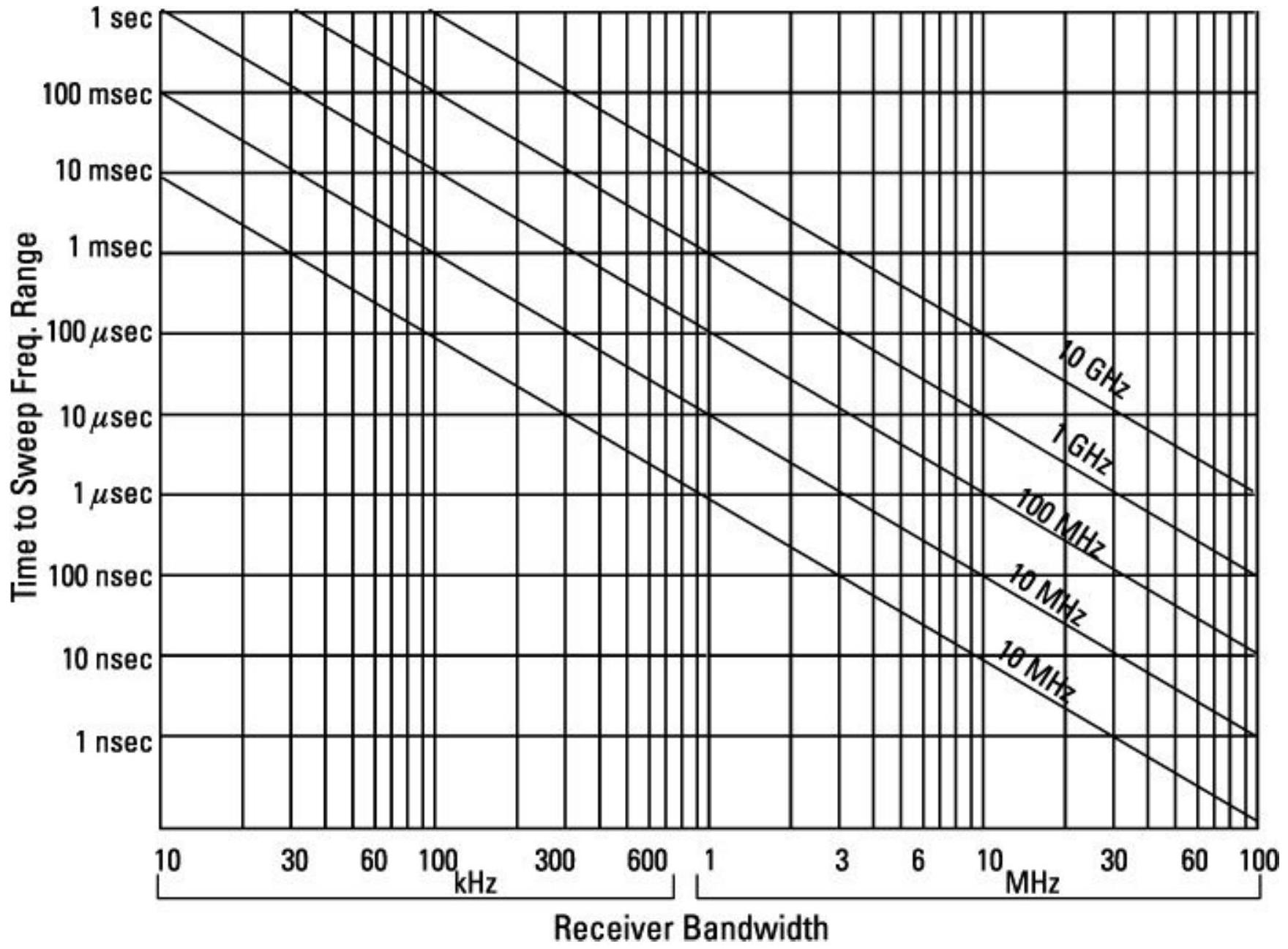
图 11.11 在带宽内有足够驻留时间的情况下,扫描频率范围所需的时间是接收机带宽与扫描范围的函数。
| ES 数据收集 | SIGINT 数据收集 | |
|---|---|---|
| 雷达威胁信号 | 仅收集足够数据以确定雷达类型和工作模式 已知威胁的数据范围 足够的参数分辨率以解决识别歧义 |
收集足够的数据以支持详细分析 数据范围受任何未来威胁的实际范围限制 足够的参数分辨率以确定任何未来威胁的能力 |
| 通信威胁信号 | 仅收集外部数据(频率、调制类型和水平、接收信号强度、发射机位置、拦截时间) 参数范围和分辨率仅足以支持威胁识别、电子兵力编排 (EOB) 和干扰活动 |
收集外部和内部数据 外部数据与 ES 要求相似 内部数据足以从解调信号中恢复所需军事信息 |
图 11.12 数据收集需求在 ES 与 SIGINT 系统之间差异显著。
一般而言,雷达 ES 系统仅收集足够的数据以确定敌方使用了哪些武器,并允许选择正确的对抗措施。所有这些操作都在个位数秒内完成。接收数据的收集与使用如图 11.13 所示。注意,存储在接收机系统威胁识别表 (TID) 中的威胁参数是先前由 ELINT 系统收集数据经过广泛分析的结果。
ELINT 系统(即针对雷达威胁的 SIGINT 系统)必须在整个预期参数范围内收集更完整的数据。这些详细数据可以通过延长时间和/或多次拦截收集,用于支持雷达 ES 系统必须立即识别的详细分析。表 11.3 给出了典型脉冲雷达威胁信号由 ELINT 系统收集的数据摘要。
表 11.3 典型脉冲雷达威胁的 ELINT 数据
| 参数 | 范围 | 分辨率 | 位数 |
|---|---|---|---|
| 脉冲宽度 | 0.1 至 20 μs | 0.1 μs | 9 |
| 脉冲重复间隔 | 3 至 3,000 μs | 3 μs | 11 |
| 无线电频率 | 0.5 至 40 GHz | 100 MHz | 10 |
| 扫描周期 | 0 至 30 秒 | 0.1 秒 | 9 |
| BPSK 时钟速率 | 0 至 50 Mpps | 100 pps | 16 |
| 脉冲上的 BPSK 位 | 0 至 1,000 | 1 位 | 10 |
| 脉冲 FM 范围 | 0 至 10 MHz | 100 kHz | 7 |
| 每信号总位数 | 78 |
通信 ES 系统处理威胁信号的外部信息,以支持电子兵力编排、对抗措施部署以及火力与机动战术选择。通常,由于战术行动的动态性,这必须非常迅速完成。数据量(通常为数字)由必须收集的参数数量和支持战术分析所需的分辨率决定。表 11.4 显示了每个威胁的通信 ES 收集中可能需要的典型参数数组。
表 11.4 通信 ES 威胁信号的典型参数捕获
| 参数 | 范围 | 分辨率 | 位数 |
|---|---|---|---|
| 无线电频率 | 10 至 1,000 MHz | 1 MHz | 12 |
| 调制类型 | 3 | ||
| 加密类型 | 3 | ||
| 到达方向 | 0° 至 360° | 1° | 9 |
| 每信号总位数 | 27 |
如果存在 250 个信号且环境每秒采集 10 次,所需数据带宽可能为:
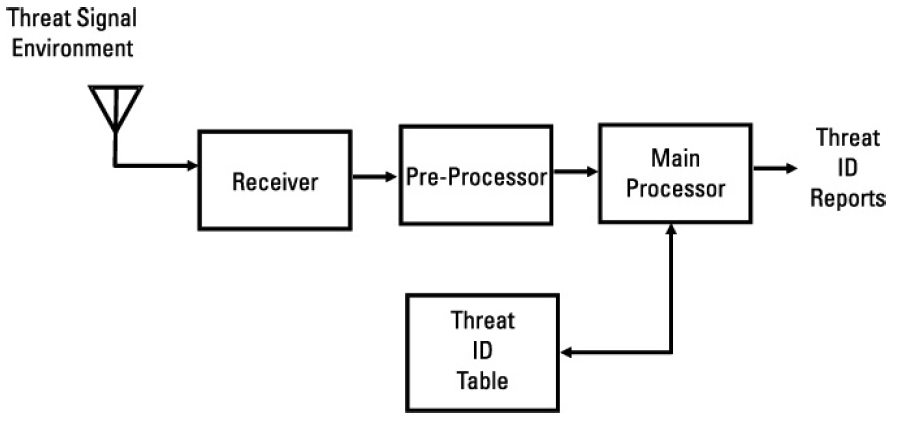
图 11.13 在雷达 ES 系统中,从每个接收信号确定信号参数,并将信号参数文件与威胁识别表进行比较,输出威胁识别报告。
COMINT(即针对通信威胁的 SIGINT)通常假定提取通信信号所携带的军事有用信息。然而,这些信息通常必须与发射机的位置和类型相关,才能有用。因此,在大多数情况下,COMINT 系统需要捕获信号的外部和内部数据,如图 11.14 所示。除了外部数据所需的位之外,还必须捕获调制。这将需要一定数量的分辨率位(3 至 6 位)乘以两倍音频输出带宽(或中频带宽)再乘以假定同时激活的通道数。例如,如果使用 6 位数字化,并且有 20 个 25 kHz 宽的通道,则总比特率可能为:
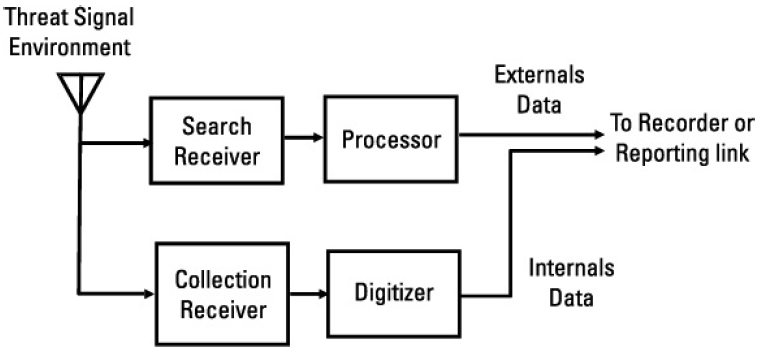
图 11.14 COMINT 系统捕获接收信号的外部和内部信息。
重要的是记住关于 EW 和 SIGINT 系统应用环境的古老陈述:“任何战术问题只有唯一正确的答案:取决于情况和地形。”更具体地说,正确答案取决于威胁信号调制、威胁工作特性、环境密度、威胁和接收资产的几何部署与运动,以及战术态势。因此,没有单一正确答案,本章的主要目标是帮助你进行权衡以优化结果。
11.9 只需增加记录器¶
有些雷达 ES 系统包含数字记录器,用于捕获在正常 ES 操作过程中可能遇到的任何新型信号特性,如图 11.15 所示。这使得一些人认为这样的系统可以消除对 SIGINT 系统的需求。这在某些情况下是可能的:取决于具体的情境和地形。一般而言,在做出这种判断之前,明智的做法是考虑系统性搜索和分析新型威胁信号类型的不同环境,以及需要收集的数据类型。

图 11.15 数字记录器可以包含在雷达 ES 系统中,以捕获遇到的新型信号参数。
Reference¶
[1] Adamy, D., EW 101: A First Course in Electronic Warfare, Norwood, MA: Artech House, 2001.