3. 传统雷达¶
本章讨论的是较早期的威胁系统,主要作为第4章中新一代威胁的对比基线。
3.1 威胁参数¶
在冷战期间,为了攻击高于高射炮有效高度的高空飞机,研发了多种地对空导弹。其中最成功的是SA-2“指导者”(Guideline)导弹,这是一种指令制导武器,由“扇歌”(Fan Song)雷达控制其飞向目标。这些武器被组织进综合防空网络中,该网络包括搜索和跟踪雷达、多具导弹发射器,以及由炮瞄雷达(gun dish radar)引导的ZSU-23高射炮。
在越南战争中,这些武器被高效使用,随后在数年内的多次地区冲突中又有若干新导弹系统加入。
此外,还有空对空导弹和反舰导弹是雷达制导的。在本书中,我们使用这些武器的北约代号,它们同时也以苏联代号为人所知。这些武器中有些仍在使用,而且大多数已经经过多方面升级。
需要在此澄清的是,本节讨论并非全面的威胁简报。关于这些武器系统的信息在互联网上广泛存在。各种武器的射程以及每次升级所增加的一般能力都有描述。但某些参数(例如工作频率范围、等效辐射功率和调制参数)在公开文献中没有描述或描述不清。本章将仅泛泛提及这些武器,并基于它们开发一组典型参数,用于支持我们对各类电子战(EW)技术的讨论。
一些重要参数可在公开文献(教材、技术杂志文章和网络文章)中找到,但另一些则无法获得。在第4章中,我们将转向现代威胁,这些威胁在公开文献中的描述更少。公开文献的描述通常会给出某些威胁参数的一系列取值范围,但完全忽略其他参数。在文献中能找到的,我们会选择看似合理的典型值;若某一参数在公开文献中没有出现,我们将基于已有信息进行计算,得到一个典型值。
需要理解的是,这些武器及其相关雷达的全部参数可以在机密资料中找到。由于这是一本非涉密书籍,这些信息在此不可用。然而,我们设定的典型参数将使我们能够讨论EW技术并推导出数值解答。这些答案仅在与恰好具备我们选定典型值的威胁系统相比时是准确的。由于现实中的系统不可能在所有参数上都与我们的设定完全一致,我们的答案在现实中会是错误的。然而,它们将是“完全错误的”。因此,当你将书中讨论的计算应用于现实威胁时,可以查阅你所掌握的机密资料中的真实参数,并将这些真实参数代入本书所讨论的方程,得到真实结果。
在第4章中,当我们讨论新系统时,公开文献中可用的参数更少,但相同的方法仍然能帮助我们确定,随着威胁参数的升级,所需的技术和EW系统也应做出哪些调整。
我们将针对每类威胁获取或计算的具体参数包括:
- 杀伤射程;
- 工作频率;
- 等效辐射功率;
- 脉冲宽度;
- 脉冲重复频率;
- 天线旁瓣隔离度;
- 易损目标的雷达散射截面(RCS)。
3.1.1 典型传统地对空导弹¶
SA-2是一个理想的典型威胁候选,因为它被广泛使用且至今仍存在,并经历了多次升级。表3.1给出了我们将用于典型传统地对空导弹的参数值。这些数据基于对公开文献中SA-2的分析。由于许多参数在公开资料中没有明确说明,表中每个取值都附有选择的理由。
在公开文献中,SA-2的杀伤射程最常见的描述是约45 km,最大高度通常为20 km。然而,也有在更高空击落目标的记录。
工作频率在不同型号的SA-2中给出为E、F和G波段。当给出工作波段时,我们会在该波段的中间附近选择一个整数频率作为典型值。因此,典型的SA-2工作频率我们取3.5 GHz(位于F波段)。
发射机功率在公开文献中给出为600 kW(适用于E和F波段版本),换算为分贝形式如下:
为方便本章的计算,我们将其取整为88 dBm。
威胁雷达的天线波束轴向增益在公开文献中并不常见,但其波束宽度参数有给出。对于SA-2的“扇歌”雷达,其天线双扇形波束的角宽为\(2^{\circ} \times 10^{\circ}\)。非对称天线波束的增益可由下式计算:
其中\(G\)为波束轴向增益比,\(\theta_1\)与\(\theta_2\)为正交两个方向的3 dB波束宽度。
根据公开文献中给出的SA-2信息计算天线增益:
换算为分贝:\(10 \log_{10}(1450) = 31.6 \,\mathrm{dB}\)。
为方便起见,本章中我们将其取整为32 dB。
等效辐射功率(ERP)在公开文献中不易获得;其定义为发射机功率与天线增益的乘积。对雷达而言,我们使用天线波束轴向增益。因此,SA-2“扇歌”雷达的ERP为:
为方便计算,我们取整后使用:
在公开文献中,SA-2的脉冲宽度(PW)为0.4至\(1.2 \,\mu s\)。我们取\(1 \,\mu s\)作为典型值。
脉冲重复频率(PRF)在公开文献中给出为跟踪模式下每秒1440个脉冲。为方便起见,我们将典型值取为每秒1400个脉冲。
表3.1 典型传统地对空导弹(SAM)参数
| 参数 | 典型值 |
|---|---|
| 杀伤射程 | 45 km |
| 最大高度 | 20 km |
| 工作频率 | 3.5 GHz |
| 发射机功率 | 88 dBm |
| 天线波束轴向增益 | 32 dB |
| 天线波束宽度 | \(+2^{\circ} \times 10^{\circ}\) |
| 等效辐射功率 | \(+120 \,\mathrm{dBm}\) |
| 旁瓣电平 | \(-21 \,\mathrm{dB}\) |
| 脉冲宽度 | \(1 \,\mu s\) |
| 脉冲重复频率 | 1400 pps |
| 目标雷达散射截面(RCS) | \(1 \,\mathrm{m}^2\) |
天线旁瓣电平在公开文献中不容易找到,因此我们将使用[1]中天线旁瓣电平表格的中间值,其中普通天线的相对旁瓣电平列为 -13 到 -30 dB。这里的旁瓣电平定义为雷达天线主波束之外的平均旁瓣电平,与主波束的峰值轴向增益相比。我们将使用 21 dB(接近其给定范围的中点)作为 SA-2 天线平均旁瓣电平的典型值。
脆弱目标的雷达散射截面积在威胁雷达中差异很大,但 \(1 \mathrm{~m}^{2}\) 在教程和雷达讨论的示例问题中经常出现。因此,我们将使用 \(1 \mathrm{~m}^{2}\) 作为典型值。
3.1.2 典型传统捕获雷达¶
一个典型的传统捕获雷达是苏联 P-12 “Spoon Rest”。表 3.2 展示了从公开文献或由公开文献参数推导出的该雷达的参数。
Spoon Rest D 型的探测距离在公开文献中给出为 275 km,其工作频率为 150 到 170 MHz,因此我们取 160 MHz 作为典型值。其发射机功率给出为 160 到 260 kW,因此我们取 200 kW 作为典型值。天线波束宽度给出为 \(6^{\circ}\),由此可根据以下公式计算出天线轴向增益为 29 dB:
其中 \(G\) 为天线轴向增益,BW 为天线的 \(3-\mathrm{dB}\) 波束宽度。
\(200-\mathrm{kW}\) 的发射功率等于 83 dBm,由于通常假定雷达的有效辐射功率(ERP)是其发射机功率与轴向增益的乘积,因此 ERP 为 112 dBm。
由于旁瓣电平在公开文献中不易找到,我们使用[1]中的相同数值。脉冲宽度和脉冲重复频率来自公开文献,我们假设相同的 \(1-\mathrm{m}^{2}\) 最小目标 RCS。
3.1.3 典型高炮¶
苏联 ZSU 23-4 “Shilka” 自动高射炮(AAA)被作为典型的传统高炮。表 3.3 展示了该武器在公开文献中的参数。履带平台上的雷达为炮碟,其天线直径为 \(1-\mathrm{m}\),在 J 波段工作。我们选取 15 GHz 作为典型 AAA 频率,因为这是 J 波段中间的一个整数值。
表 3.2 典型传统捕获雷达参数
| 参数 | 数值 |
|---|---|
| 探测距离 | 275 km |
| 最大高度 | 20 km |
| 工作频率 | 160 MHz |
| 发射功率 | 83 dBm |
| 天线轴向增益 | 29 dB |
| 天线波束宽度 | \(6{ }^{\circ}\) |
| 有效辐射功率 | \(+112 \mathrm{dBm}\) |
| 旁瓣电平 | \(-21 \mathrm{~dB}\) |
| 脉冲宽度 | \(6 \mu \mathrm{~s}\) |
| 脉冲重复频率 | 360 pps |
| 目标雷达散射截面积 | \(1 \mathrm{~m}^{2}\) |
表 3.3 典型传统高炮参数
| 参数 | 数值 |
|---|---|
| 致命射程 | 2.5 km |
| 最大高度 | 1.5 km |
| 工作频率 | 15 GHz |
| 发射功率 | 70 dBm |
| 天线轴向增益 | 41 dB |
| 天线波束宽度 | \(1.5^{\circ}\) |
| 有效辐射功率 | 111 dBm |
| 旁瓣电平 | \(-21 \mathrm{~dB}\) |
| 目标雷达散射截面积 | \(1 \mathrm{~m}^{2}\) |
由于炮碟的发射功率在公开文献中不易找到,我们使用德国 Wurzburg 雷达的 \(10-\mathrm{kW}\) 典型功率作为短程 AAA 雷达的典型值。这相当于 70 dBm。在 15 GHz 下 \(1-\mathrm{m}\) 碟形天线的增益可由公式计算:
其中 \(G\) 为天线轴向增益(dB),\(D\) 为天线直径(米),\(F\) 为工作频率(MHz)。
对于 15 GHz 下的 \(1-\mathrm{m}\) 碟形天线,计算结果为(四舍五入)41 dB。因此 ERP 为(四舍五入)111 dBm。
天线 \(1.5^{\circ}\) 的波束宽度可由公式计算:
其中 \(\theta\) 为 \(3-\mathrm{dB}\) 波束宽度(角度),\(D\) 为天线直径(米),\(F\) 为工作频率(MHz)。
对于 15 GHz 下的 \(1-\mathrm{m}\) 碟形天线,\(20 \log \theta\) 的数值为 3.3。
波束宽度由下式得到:
天线旁瓣和最小目标 RCS 设置为表 3.1 和表 3.2 中的相同数值。调制参数在公开文献中不易找到。
3.2 电子战技术¶
在本章和第 4 章中,我们将讨论以下电子战活动及其相关计算:
- 探测、截获与辐射源定位;
- 自卫干扰;
- 远程干扰以保护其他资产;
- 箔条与诱饵的资产防护;
- 反辐射导弹。
在每种情况下,我们将推导相应的公式,并使用第 3.1 节所述的典型参数值进行实例问题计算。
我们将为每种威胁类型计算的具体结果包括:
- 截获距离;
- 干扰-信号比 (J/S);
- 突破距离;
- 诱饵对雷达散射截面的模拟。
3.3 雷达干扰¶
本节及本章的其余部分是对雷达干扰的回顾,更详细的内容(包括公式推导)在[2,3]的完整章节中覆盖。这里的目的在于支撑第 4 章关于新一代威胁雷达的电子战影响的讨论。另一个更详细的雷达干扰教程参考资料是[4]中的系列文章。
雷达干扰的方法根据几何位置和技术手段区分。首先,我们将讨论几何方面的考虑:自卫干扰和远程干扰。这包括与两种干扰类型相关的 J/S 和突破距离的分贝公式。在以下讨论中,所有干扰功率均假设在雷达接收机带宽内,并假设雷达使用同一天线进行发射和接收。更复杂的情况将在后面讨论。如第 1 章所述,本节中的每个分贝公式都包含一个数值常数(例如 -103)。该数值结合了转换因子,使得可以以最方便的单位输入数值。较大的结果数值被转换为分贝形式。在使用所有分贝公式时,一个非常重要的考虑是输入值必须使用指定的单位才能得到正确答案。
关于这些公式的另一个重要点是,这些分贝公式的输入涉及不同的单位:频率以 MHz 计,功率以 dBm 计,等等,看似在没有单位区分的情况下直接相加。虽然这会让一些人感到困扰,但这些单位可以结合使用,因为数值常数中隐藏了单位转换。在本书所给出的分贝公式(未推导)中,这些转换在严格推导时会被处理。通常的做法是直接接受这些隐藏的转换。
3.3.1 干扰-信号比¶
首先,考虑雷达接收机接收到的来自目标表面反射的功率。如图 3.1 所示,发射功率被雷达天线聚焦到目标方向。有效辐射功率(分贝形式)等于发射机功率加上主波束轴向增益。由于典型雷达使用定向天线收发信号,其传播模式为视距(见第 6 章)。雷达接收机中的目标表面反射功率称为 \(S\),其公式(以 dBm 表示)为:
其中 \(E R P_{R}\) 是雷达对目标方向的有效辐射功率(dBm),\(R\) 为雷达到目标的距离(km),\(F\) 为雷达发射频率(MHz),\(\sigma\) 为目标的雷达散射截面积(平方米),\(G\) 为雷达天线主波束轴向增益(dB)。
雷达从干扰机接收到的功率称为 \(J\),其公式(以 dBm 表示)为:

图 3.1 雷达表面反射功率由雷达发射功率和天线增益、目标距离以及目标雷达散射截面积计算。
其中 \(E R P_{J}\) 为干扰机对雷达方向的有效辐射功率(dBm),\(R_{J}\) 为干扰机到雷达的距离(km),\(F\) 为干扰机发射频率(MHz),\(G_{R J}\) 为雷达天线在干扰机方向上的增益(dB)。
3.3.2 自卫干扰¶
如图 3.2 所示,自卫干扰机安装在被雷达探测或跟踪的目标上。这意味着干扰机到雷达的距离为 \(R\),并且雷达天线对干扰机和目标的增益相同(记为 \(G\))。通过将 \(S\) 的表达式从 \(J\) 的表达式中相减并简化,得到自卫干扰产生的 J/S 公式:
其中 71 为常数,\(E R P_{J}\) 为干扰机的有效辐射功率(dBm),\(E R P_{R}\) 为雷达的有效辐射功率(dBm),\(R\) 为雷达到目标的距离(km),\(\sigma\) 为目标的雷达散射截面积(平方米)。

图 3.2 自卫干扰通过机载干扰机保护目标。
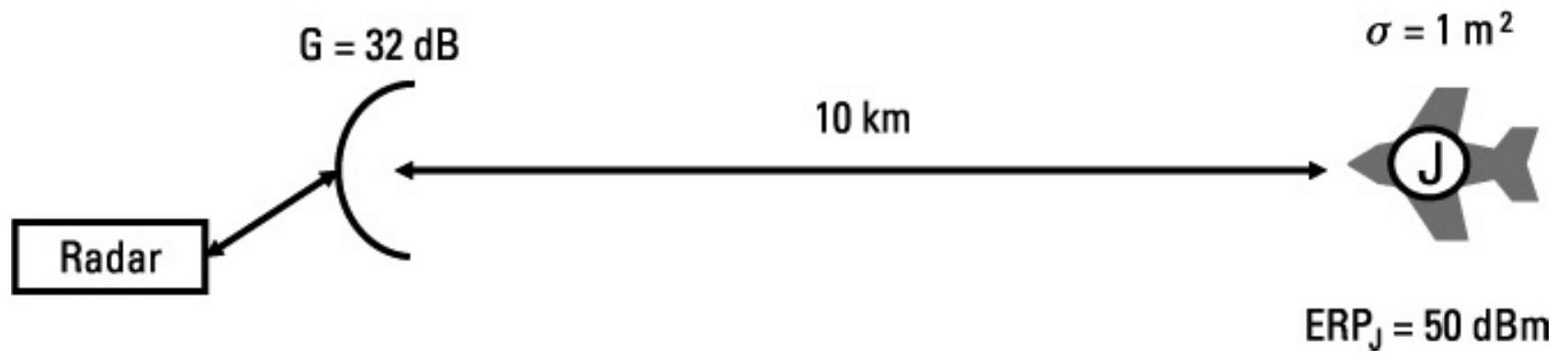
图 3.3 自卫干扰问题。
让我们考虑图 3.3 所示的一个具体自卫干扰情况,参数列于表 3.1。一部威胁雷达在 10 km 处跟踪一架雷达散射截面积为 \(1\mathrm{m}^{2}\) 的目标飞机。安装在该目标飞机上的干扰机 ERP 为 100 W 或 +50 dBm。雷达 ERP 为 +120 dBm。雷达天线轴向增益为 32 dB,且天线轴向正对目标。
将这些数值代入上述 \(J / S\) 公式,得到:
其中 71 为常数,\(E R P_{J}\) 为干扰机的有效辐射功率(dBm),\(E R P_{R}\) 为雷达的有效辐射功率(dBm),\(R\) 为雷达到目标的距离(km),\(\sigma\) 为目标的雷达散射截面积(平方米)。
3.3.3 远程干扰¶
在远程干扰中,干扰机并不位于目标处。远程干扰的经典案例是如图 3.4 所示的站外干扰。干扰机(位于一架专门的干扰飞机上)处于跟踪雷达控制的武器致命射程之外。干扰机保护处于该致命射程内的目标飞机。需要注意的是,站外干扰机通常保护多个目标免于被多个雷达获取。这意味着干扰机不可能处于所有雷达的主波束中;因此,假定其向所有敌方雷达的旁瓣进行广播。
所有类型的远程干扰机将根据以下公式产生 \(\mathrm{J} / \mathrm{S}\):
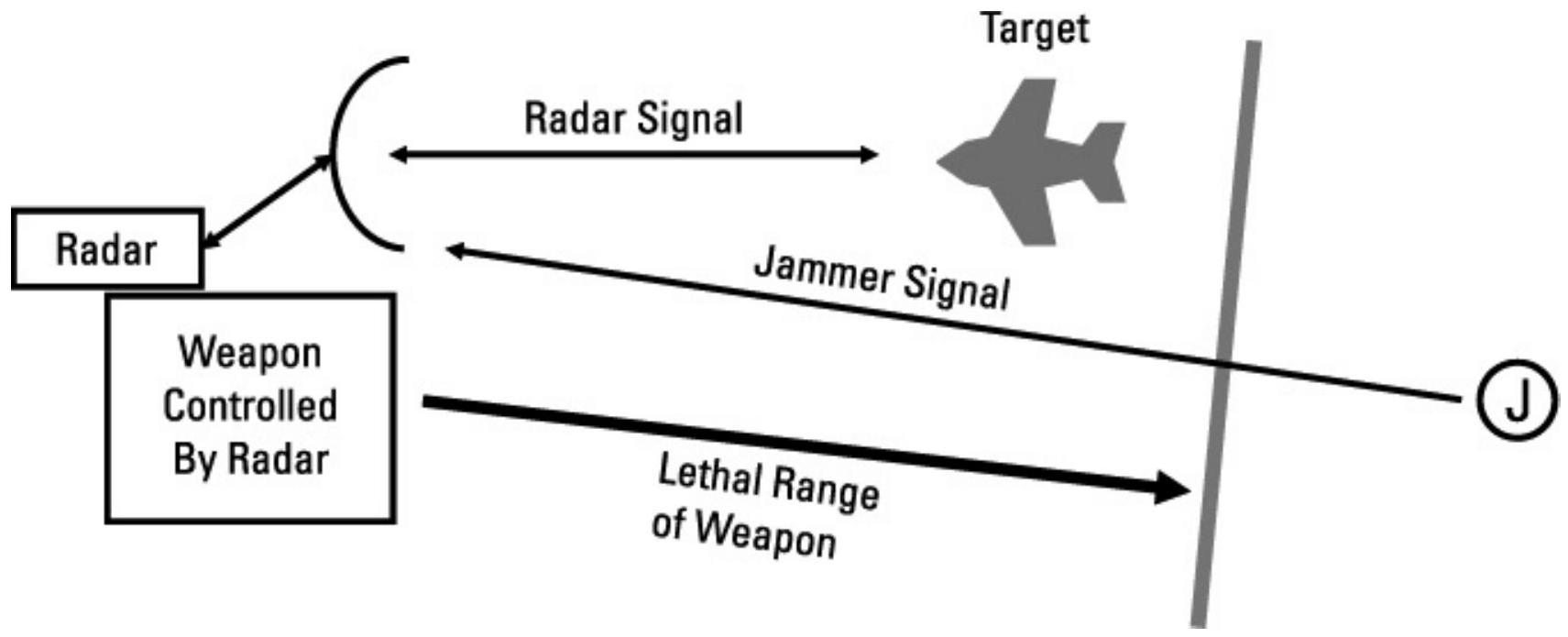
图 3.4 站外干扰通过位于致命射程之外的干扰机保护处于雷达控制武器致命射程内的目标。
其中 71 为常数,\(E R P_{J}\) 为干扰机的有效辐射功率(dBm),\(E R P_{R}\) 为雷达的有效辐射功率(dBm),\(R_{T}\) 为雷达到目标的距离(km),\(R_{J}\) 为干扰机到雷达的距离(km),\(G_{S}\) 为雷达旁瓣增益(由上文的 \(G_{R J}\) 重新定义,单位 dB),\(G_{M}\) 为雷达主波束轴向增益(dB),\(\sigma\) 为目标的雷达散射截面积(平方米)。
考虑一个雷达试图跟踪一架距离其 5 km 的目标飞机,天线的轴向正对目标,如图 3.5 所示。干扰机(位于一架站外干扰飞机上)位于雷达天线的一个旁瓣中,距离略大于雷达控制武器系统的最大致命射程。
干扰机的 ERP 远大于自卫干扰机。如果其发射功率为 1 kW,天线增益为 20 dB,则其 ERP 为 80 dBm。雷达天线的轴向增益为 32 dB,其旁瓣隔离度为 21 dB(这两个数值来自表 3.1)。因此旁瓣增益为 11 dB。站外干扰机的距离为 46 km(略大于表 3.1 中的 \(45-\mathrm{km}\) 致命射程)。目标飞机的 RCS 为 \(1 \mathrm{m}^{2}\)。
将这些数值代入上述远程干扰公式得到:
图 3.6 展示了另一种远程干扰情况。这是站内干扰,即干扰机放置在比其保护的目标飞机更靠近敌方雷达的位置。该干扰机同样假设向敌方雷达的旁瓣广播。
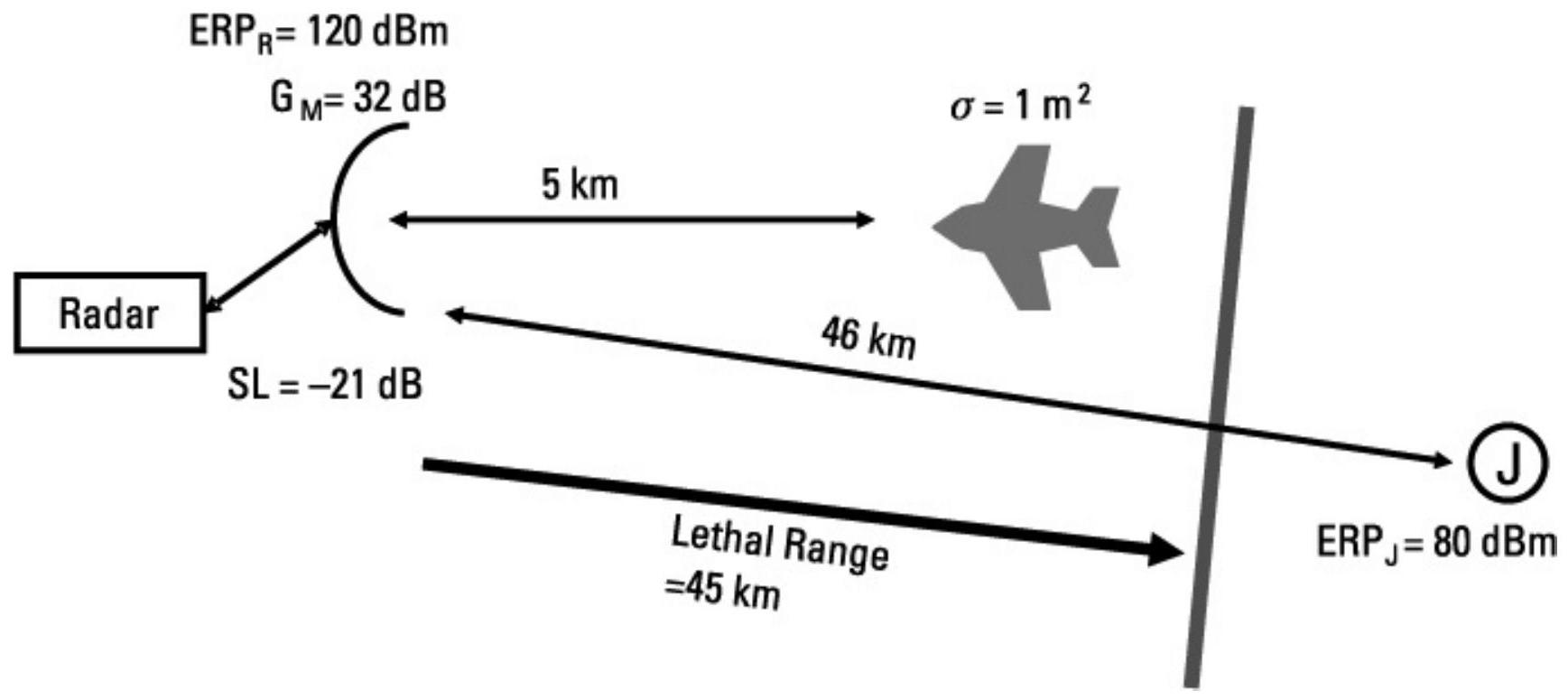
图 3.5 站外干扰问题。
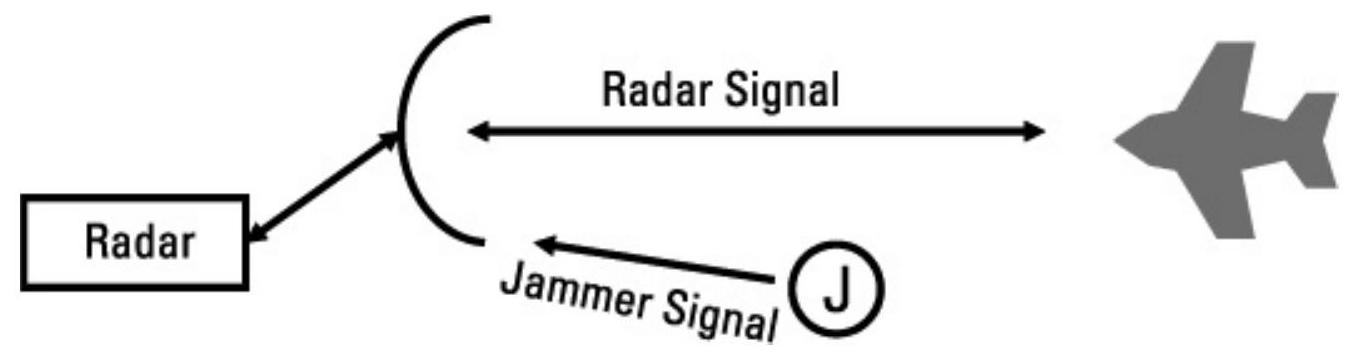
图 3.6 站内干扰通过位于更靠近雷达的干扰机保护目标。
考虑图 3.7 所示情况:一架 \(1-\mathrm{m}^{2}\) RCS 飞机距离雷达 10 km,处于其天线轴向。一个小型固定干扰机位于距雷达 500 m 的旁瓣中,该旁瓣增益比轴向增益低 21 dB。干扰机的 ERP 为 1 W(30 dBm)。
将这些数值代入上述远程干扰公式得到:
3.3.4 突破距离¶
在上述两个公式中,\(\mathrm{J} / \mathrm{S}\) 是雷达到目标距离的正函数。因此,当目标接近雷达时,\(\mathrm{J} / \mathrm{S}\) 会减小。当 \(\mathrm{J} / \mathrm{S}\) 足够小时,受干扰的雷达能够重新捕获目标。通常做法是确定一个可能发生重新捕获的 \(\mathrm{J} / \mathrm{S}\) 值,并将目标在该 J/S 下的距离定义为突破距离。
图 3.8 以自卫干扰为例说明了这一点。需要注意的是,雷达表面反射功率随距离减小的四次方增加,而接收到的干扰功率仅随距离减小的平方增加。

图 3.7 站内干扰问题。
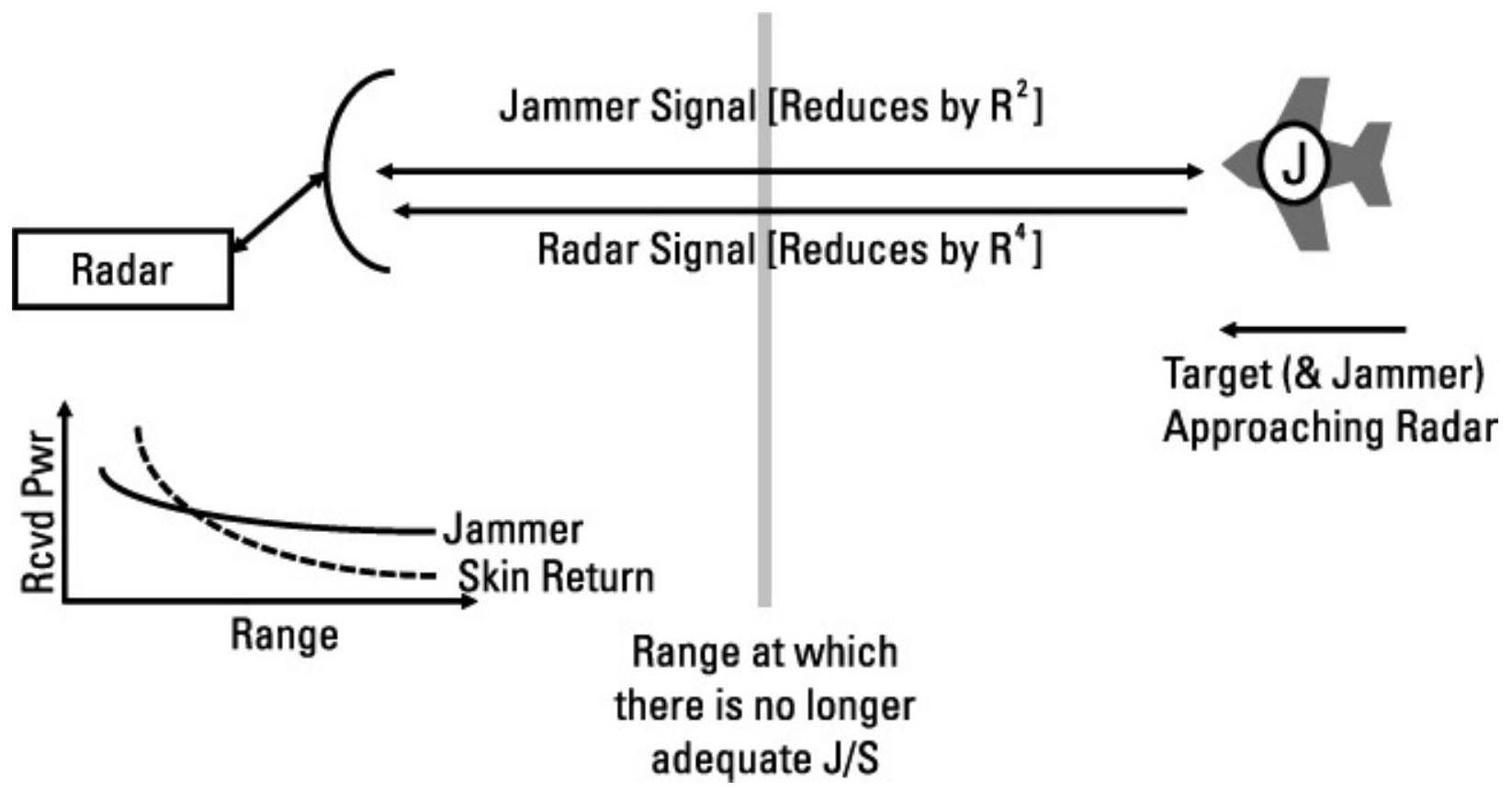
图 3.8 当目标足够接近雷达时,雷达能够在干扰下重新捕获目标(自卫突破)。
自卫突破距离的公式由自卫 J/S 公式推导如下:
其中 \(R_{B T}\) 为突破距离(km),\(E R P_{J}\) 为干扰机的有效辐射功率(dBm),\(E R P_{R}\) 为雷达的有效辐射功率(dBm),\(\sigma\) 为目标 RCS,\(\mathrm{J} / \mathrm{S}\) Rqd 为雷达可能重新捕获目标的 \(\mathrm{J} / \mathrm{S}\) 值。
突破距离(km)可由 \(20 \log R_{B T}\) 的数值得到:
考虑图 3.3 所示的自卫干扰情况,目标飞机正向雷达飞行。在图 3.9 中,目标达到的距离使得 \(\mathrm{J} / \mathrm{S}\) 降低到雷达能够在干扰存在下重新捕获目标的位置。需要注意的是,突破 \(\mathrm{J} / \mathrm{S}\) 取决于所采用的干扰类型,\(0-\mathrm{dB} \mathrm{J} / \mathrm{S}\) 常常是合适的。本例中我们任意设置突破 \(\mathrm{J} / \mathrm{S}\) 值为 2 dB。
干扰机 ERP 为 50 dBm,雷达 ERP 为 120 dBm,\(\sigma\) 为 \(1 \mathrm{~m}^{2}\),所需 J/S 为 2 dB。将这些数值代入上述自卫突破公式:
解 \(R_{B T}\) 得:
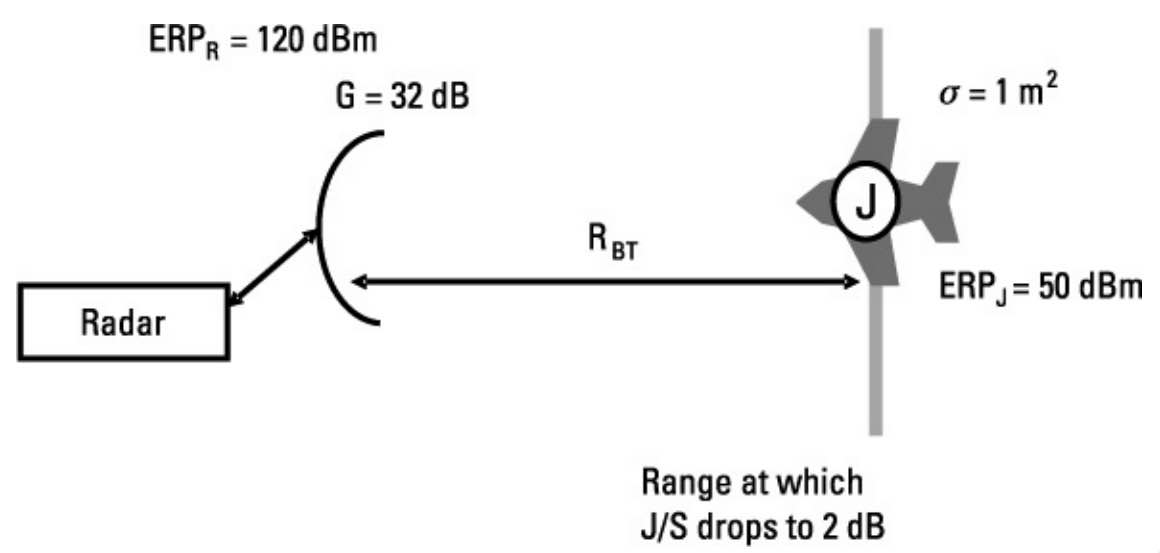
图 3.9 自卫突破问题。
图 3.10 说明了任何类型远程干扰的突破情况。需要注意的是,通常假定站外或站内干扰机在目标接近雷达时并不移动。因此,接收到的干扰功率保持不变,而接收到的表面反射功率随距离减小的四次方增加。因此,突破距离仅指雷达到目标的距离。

图 3.10 当目标足够接近雷达时,雷达能够在干扰下重新捕获目标(远程突破)。
任何类型远程干扰突破的公式由远程干扰 J/S 公式推导如下:
突破距离(km)可由 \(40 \log R_{B T}\) 的数值得到:
考虑图 3.5 所示的站外保护干扰情况,目标飞机正向雷达飞行,而站外干扰机在雷达旁瓣中飞行一个小航线,保持固定位置。在图 3.11 中,目标达到的距离使得 \(\mathrm{J} / \mathrm{S}\) 降低到雷达能够在干扰存在下重新捕获目标的位置。与自卫干扰的例子相同,我们任意设置突破 \(\mathrm{J} / \mathrm{S}\) 值为 2 dB。
干扰机 ERP 为 80 dBm,雷达 ERP 为 \(120 \mathrm{dBm}\),\(\sigma\) 为 \(1 \mathrm{~m}^{2}\),所需 J/S 为 2 dB。将这些数值代入上述远程突破公式:
解 \(R_{B T}\) 得:
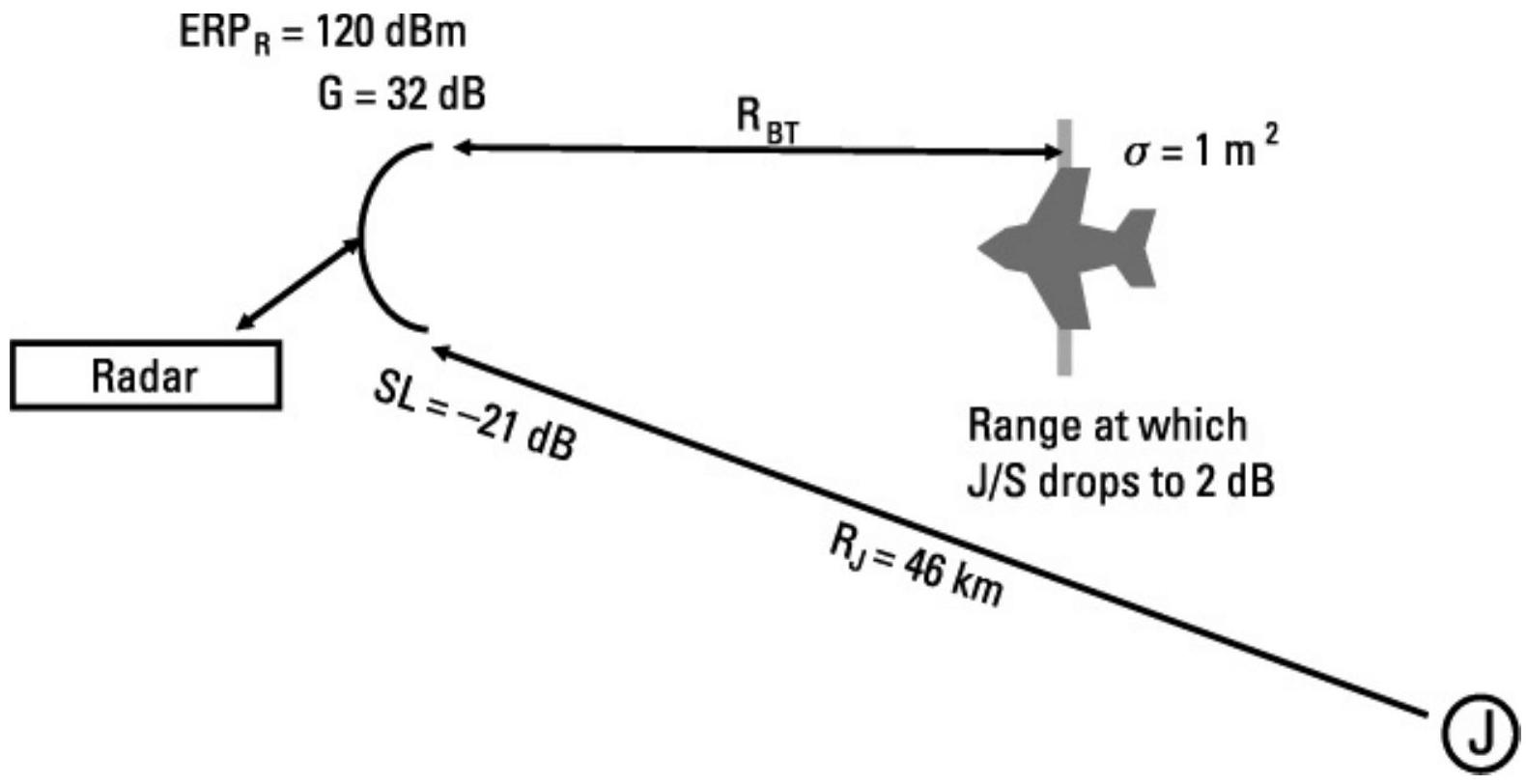
图 3.11 远程干扰突破问题。
3.4 雷达干扰技术¶
雷达干扰技术可以分为覆盖干扰和欺骗干扰。这两种技术的干扰效果均以前文讨论的 J/S 表示。
3.4.1 覆盖干扰¶
覆盖干扰的目的是降低雷达接收机中信号的质量,使雷达无法获取或跟踪目标。它可以应用于自卫干扰或远程干扰几何中。覆盖干扰通常采用噪声波形,但有时也使用其他波形来对抗雷达的电子防护(EP)功能。这些 EP 技术将在第 4 章中介绍。
第 3.3 节中给出的 J/S 和突破公式假设干扰机的所有功率均处于雷达接收机带宽内。如果干扰机使用的噪声频率范围宽于雷达接收机的有效带宽,则只有处于雷达接收机带宽内的部分才是有效的。干扰效率定义为干扰机总的有效辐射功率(ERP)与有效干扰 ERP 的比值。其等于雷达接收机带宽与干扰带宽的比值。例如,如果雷达接收机带宽为 1 MHz,而干扰信号带宽为 20 MHz,则干扰效率为 5%。
3.4.2 齐射干扰¶
齐射干扰由宽带干扰机产生,其向预期包含一个或多个威胁雷达的整个频段广播噪声。这种技术在早期干扰机中经常使用,至今在许多干扰场景中仍然适用。齐射干扰的最大优点是不需要实时的雷达工作频率信息。无需“窥视”(即中断干扰以搜索威胁雷达信号)。其问题在于齐射干扰的干扰效率通常非常低。大部分干扰功率被浪费,因为有效的 \(\mathrm{J} / \mathrm{S}\) 被效率因子降低,突破距离相应增加。
3.4.3 窄带点频干扰¶
当干扰信号带宽缩小到略大于目标雷达带宽,且干扰机调谐至雷达发射频率时,这称为点频干扰。如图 3.12 所示,点频干扰几乎不浪费干扰功率,因此干扰效率显著提高。点频宽度足以覆盖目标信号和捕获频率的不确定性。(相干干扰将在第 4 章中介绍。)其效率仍然是雷达带宽与干扰带宽的比值,但该比值更有利。Schleher [1] 将点频干扰定义为干扰带宽小于雷达带宽五倍的情况。
3.4.4 扫频点频干扰¶
如果一个窄带干扰机在预期包含威胁信号的整个频率范围内进行扫描,如图 3.13 所示,这称为扫频点频干扰。扫频点频干扰与齐射干扰一样,不需要“窥视”,并且会干扰扫频范围内的任何信号。当干扰机处于目标雷达带宽内时,其提供的干扰效率与点频干扰机相同。然而,干扰占空比会因点频带宽与扫频范围的比值而降低。这在某些情况下仍可对部分雷达提供足够的干扰效果。点频带宽与扫频范围必须根据情况进行优化。
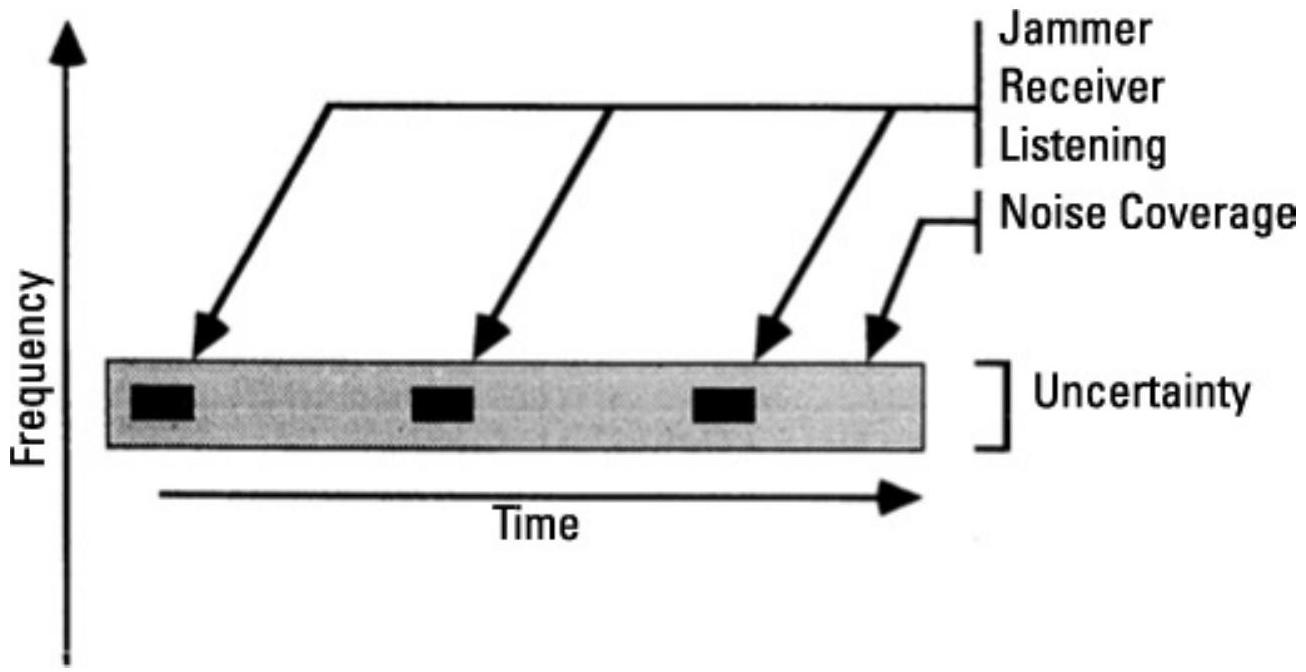
图 3.12 点频干扰将噪声集中在雷达的工作频率附近。
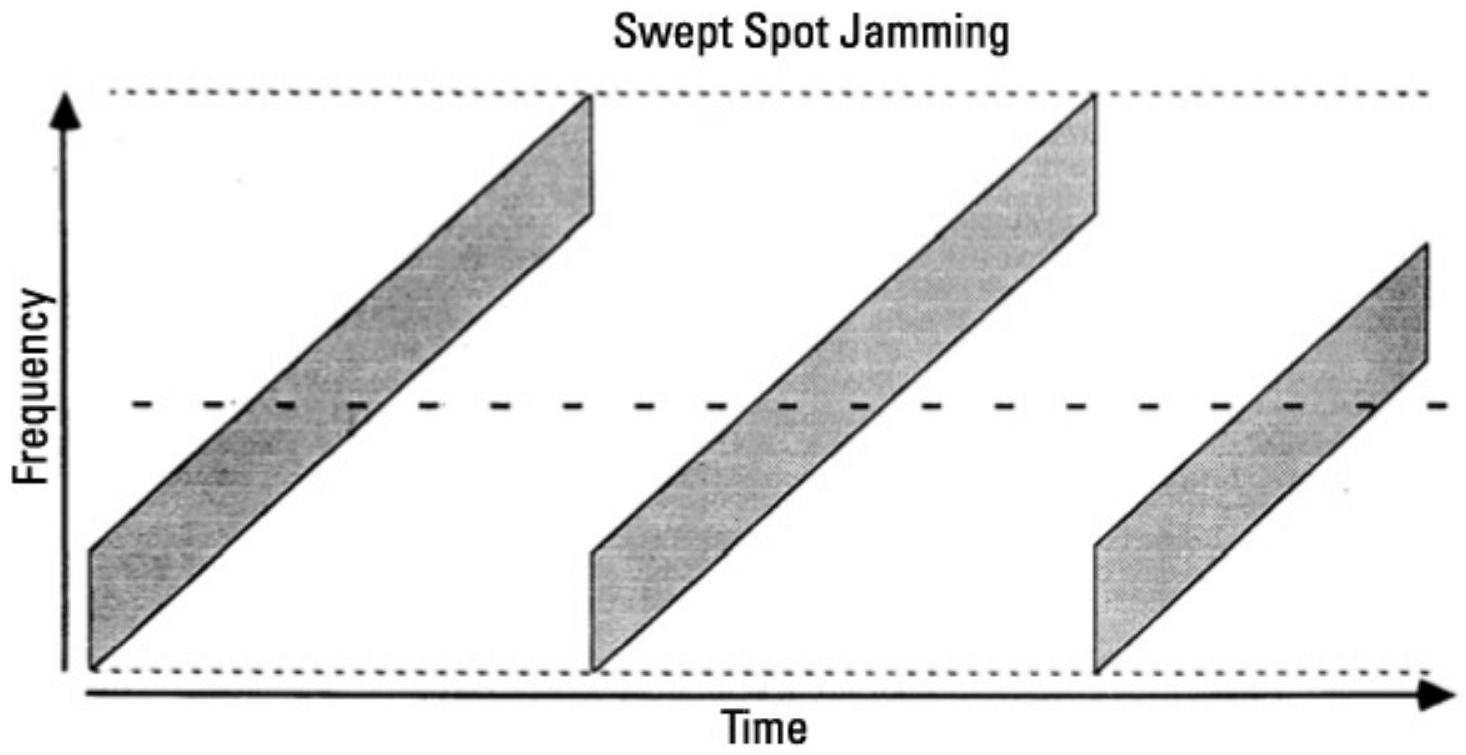
图 3.13 扫频点频干扰将一个窄带干扰信号在雷达可能工作的整个频段上扫动。
3.4.5 欺骗干扰¶
欺骗干扰机使雷达误以为接收到的是来自目标的有效回波,但其从接收信号中得到的信息导致雷达在距离或角度上丢失对目标的跟踪。由于欺骗干扰机必须以亚微秒精度锁定目标信号,因此欺骗干扰通常仅限于自卫干扰应用。从远程干扰机实施某些欺骗技术是可能的,但极少实用。因此,这里将欺骗技术作为自卫干扰进行讨论。我们首先讨论在距离上欺骗雷达的技术,然后是频率上的欺骗,最后是角度上的欺骗。
3.4.6 距离欺骗技术¶
我们将考虑三种距离技术:距离门拖引(RGPO)、距离门前拉(RGPI)和覆盖脉冲。
3.4.6.1 RGPO¶
RGPO 干扰机接收每个雷达脉冲并以更强功率返回给雷达。然而,从第二个脉冲开始,它会对后续脉冲施加逐渐增加的延迟。延迟的变化率是指数型或对数型。由于雷达通过脉冲往返传播时间来确定目标距离,因此目标看起来像是远离雷达移动。
图 3.14 显示了雷达处理器中的早门和晚门。这是两个时间门,在雷达跟踪时通常约等于一个脉冲宽度(在捕获时更长)。雷达通过平衡这两个时间段内返回脉冲的能量来跟踪目标距离。通过延迟一个更强的回波,干扰机使晚门的能量占优势,从而导致雷达失去对目标的距离跟踪。
雷达的分辨单元是雷达无法分辨多个目标的空间体积。该单元的中心距离是传输信号在早门和晚门交界处的往返传播时间所对应的位置。因此,雷达假定目标位于该单元的中心。如图 3.15 所示(二维),RGPO 干扰机会使雷达的分辨单元在距离上向外移动。一旦真实目标超出该分辨单元,雷达就会失去距离跟踪。
当 RGPO 达到最大延迟时,它会跳回零延迟并重复这一过程(多次)。雷达随后必须重新获取目标距离,这需要几毫秒时间,而此时距离跟踪又会被拖离。
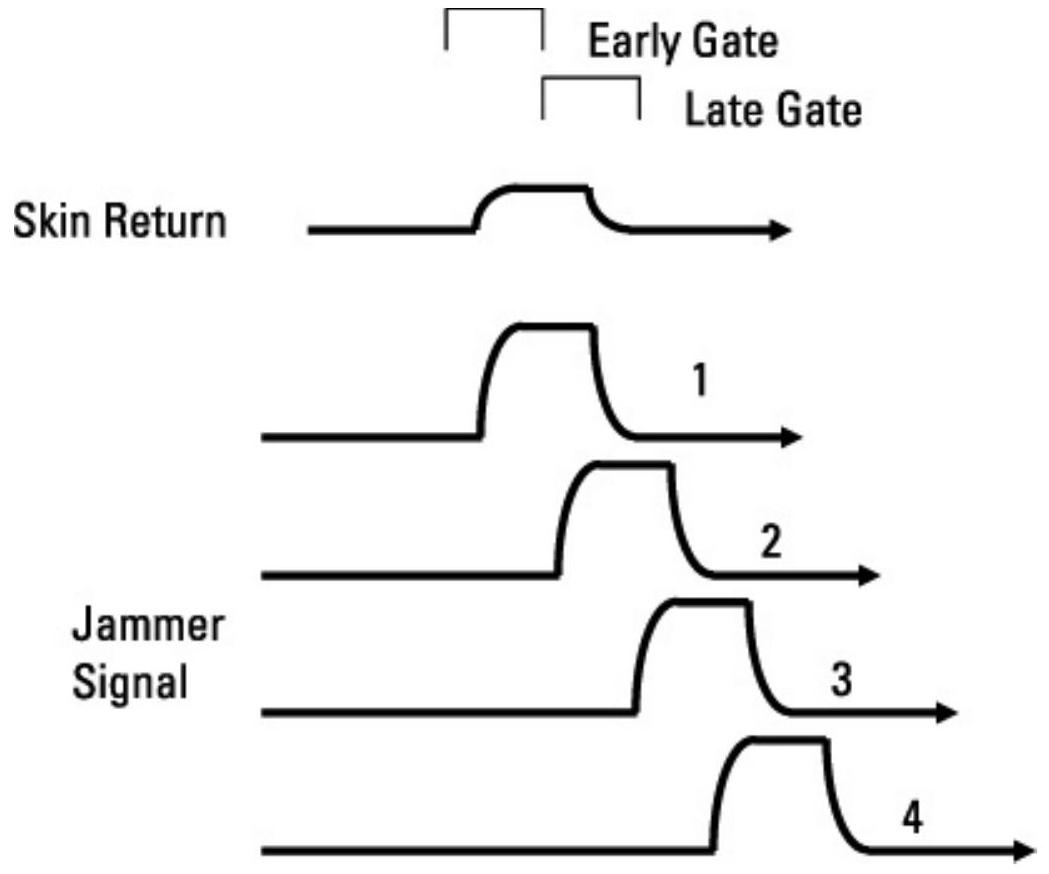
图 3.14 距离门拖引涉及对回波脉冲的连续延迟,使雷达的晚门积累能量。
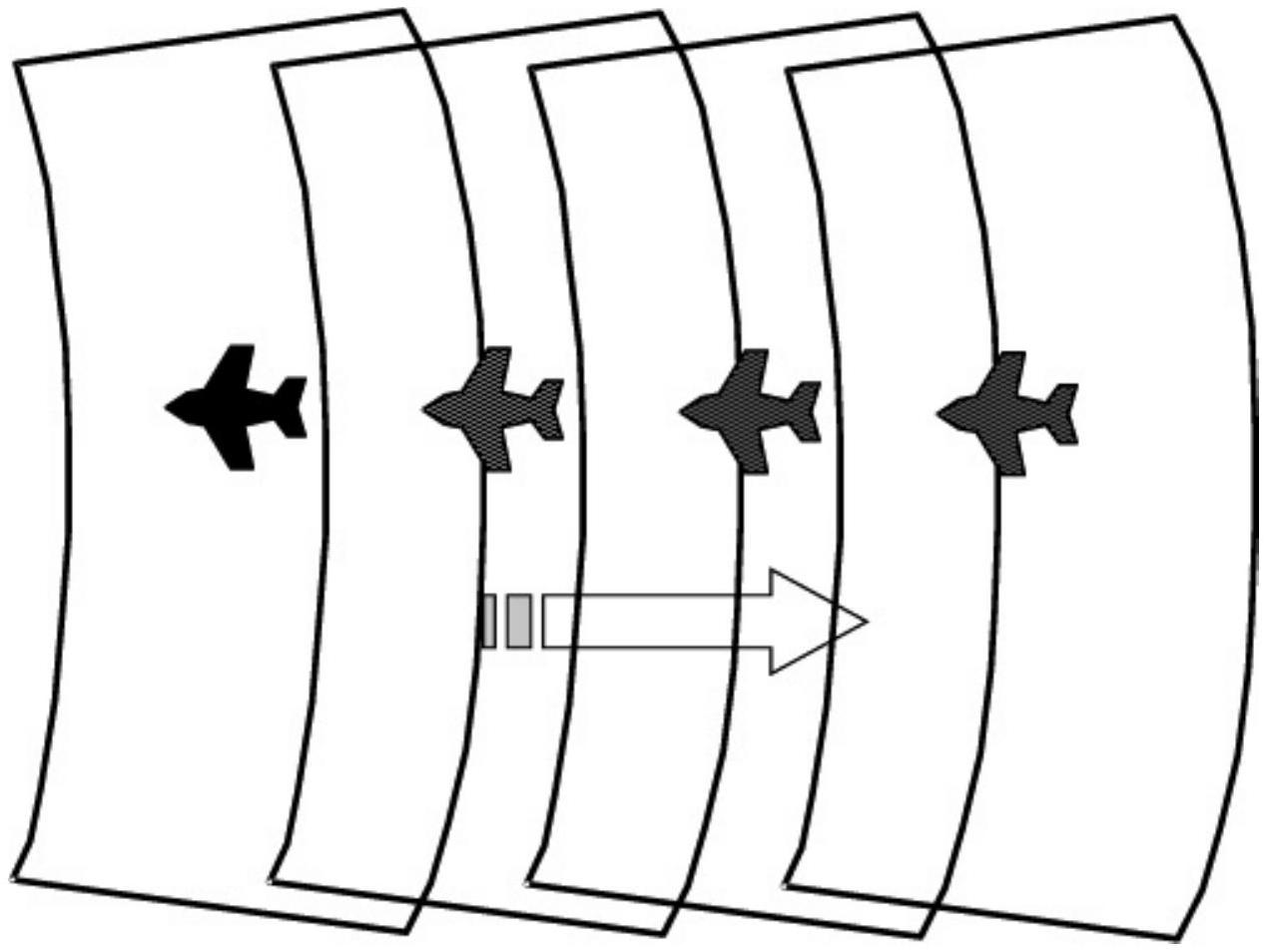
图 3.15 晚门积累能量使雷达的分辨单元向外移动,使雷达认为目标已更远。
3.4.6.2 RGPI¶
距离门前拉(RGPI)有时也称为入向距离门拖引。它用于那些仅利用脉冲前沿能量进行距离跟踪的雷达。因此,早门和晚门平衡前沿能量。由于在生成欺骗干扰脉冲过程中存在延迟,RGPO 干扰机不太可能在前沿能量突发期间捕获跟踪门,因此无法欺骗雷达。RGPI 干扰机跟踪雷达脉冲重复时序,并生成一个更强的回波脉冲,其比下一脉冲提前的量呈指数或对数递增,如图 3.16 所示。这使早门积累能量,从而使雷达认为目标正在接近。
需要注意的是,当雷达具有恒定的脉冲重复频率(PRF)或低水平交错 PRF 时,RGPI 干扰机效果良好。然而,随机 PRF 无法被跟踪,因此 RGPI 对这种信号不起作用。
3.4.6.3 覆盖脉冲¶
虽然严格来说不属于欺骗干扰,但覆盖脉冲与目标处脉冲时序紧密相关,因此也在此讨论。如果干扰机具有脉冲列跟踪器,它可以输出一个长脉冲,中心位于雷达的回波脉冲上。这将剥夺雷达的距离信息,从而阻止其进行距离跟踪。
3.4.7 角度欺骗干扰¶
当雷达的距离跟踪被破坏时,可能需要几毫秒时间重新建立跟踪,之后距离跟踪又必须再次被破坏。然而,如果角度跟踪被破坏,雷达通常必须返回搜索模式来在角度上重新定位目标,这可能需要数秒。早期雷达需要通过天线波束的移动来跟踪目标角度。考虑图 3.17 顶线上所示的圆锥扫描雷达的接收功率随时间的图像。天线运动描述一个圆锥。当天线指向目标时,接收信号更强,当天线偏离目标时,信号更弱。雷达通过将扫描图形的中心移向最大回波功率的方向来使目标居中。雷达接收机和目标上的雷达告警接收机都会看到相同的功率-时间曲线。如果位于目标上的干扰机在信号最弱时段(如图 3.17 第二行所示)发射一串强脉冲(与雷达脉冲同步),则雷达将看到如图 3.17 第三行所示的功率-时间曲线。由于雷达从这些信息中生成制导信号,处理系统将在其(狭窄的)伺服响应带宽中看到这些功率数据(虚线所示)。因此,雷达将把扫描轴偏离目标,从而破坏角度跟踪。这称为反增益干扰。
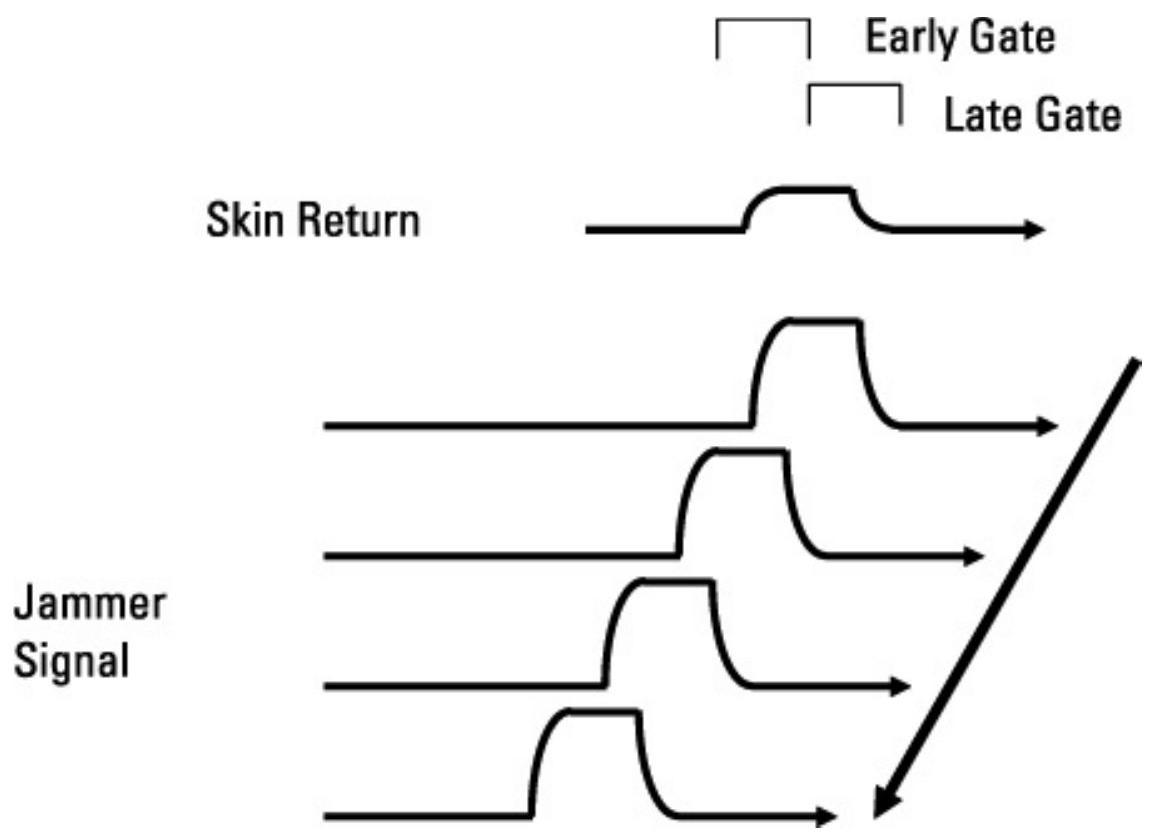
图 3.16 距离门前拉涉及对回波脉冲的逐渐提前,使雷达的早门积累能量。
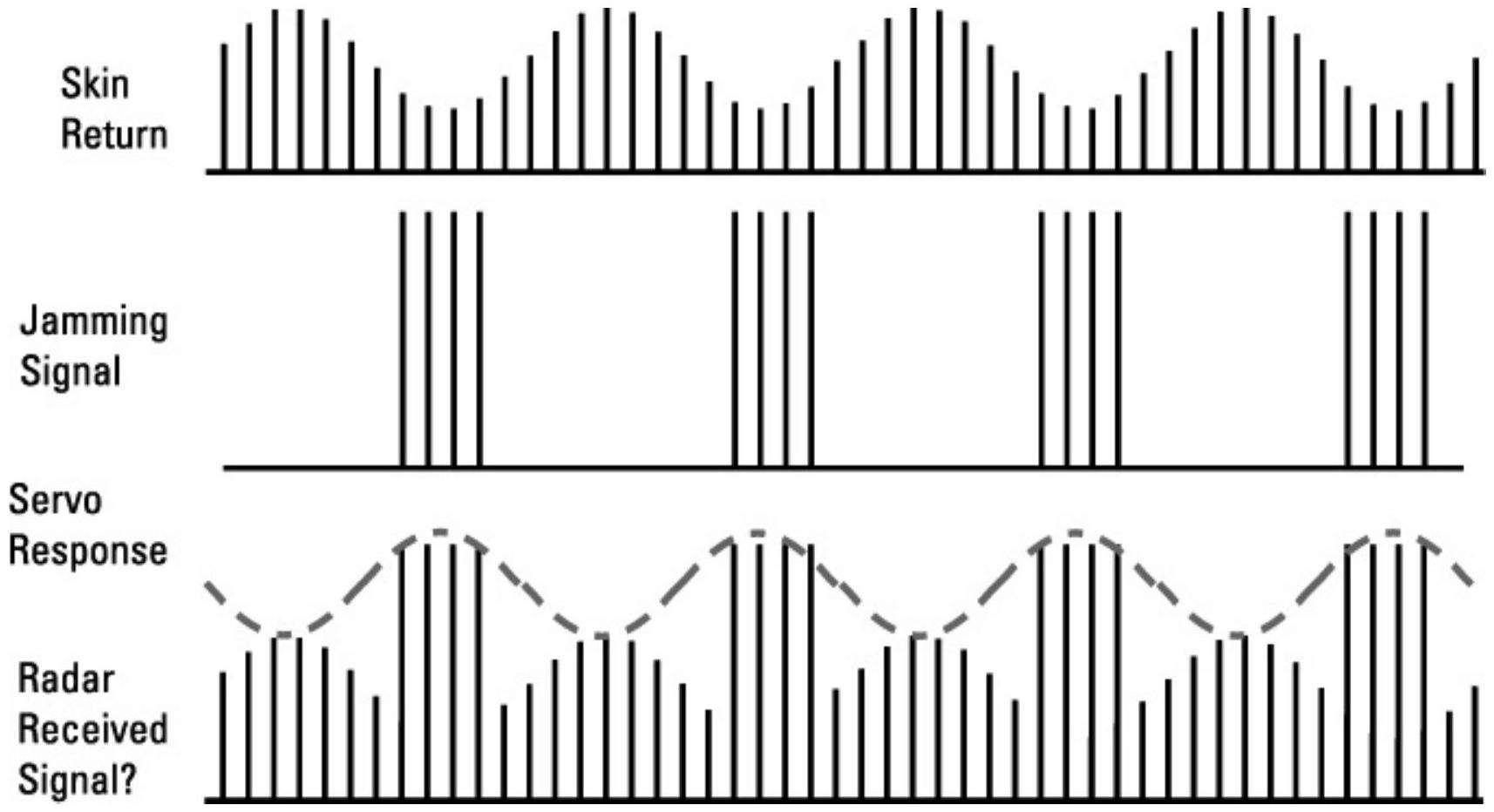
图 3.17 反增益干扰使雷达在角度制导中修正到错误的方向。
如果雷达使用非扫描照射机,但接收天线扫描,目标上的干扰机将无法知道功率随时间变化的正弦相位。因此,干扰机无法在接收功率最小时精确发射脉冲。然而,如果干扰机以比雷达天线已知扫描速率稍快或稍慢的速率发射脉冲串,干扰仍然可以破坏雷达的角度跟踪。尽管这种效果不如最佳定时的脉冲强,但仍能实现有效干扰。
图 3.18 展示了对“跟踪同时搜索”(TWS)雷达的角度干扰。在第一行中,TWS 雷达的回波在波束扫过目标时表现为一串脉冲。雷达将使用角度门来确定目标的角度位置,它会移动角度门以平衡左右两个门中的功率。这两个门的交点代表目标的角度。如果目标上的干扰机如图 3.18 第二行所示生成一系列同步脉冲串,雷达将看到第三行所示的功率-时间曲线。这会使角度门的一侧能量积累,从而导致雷达偏离目标角度。
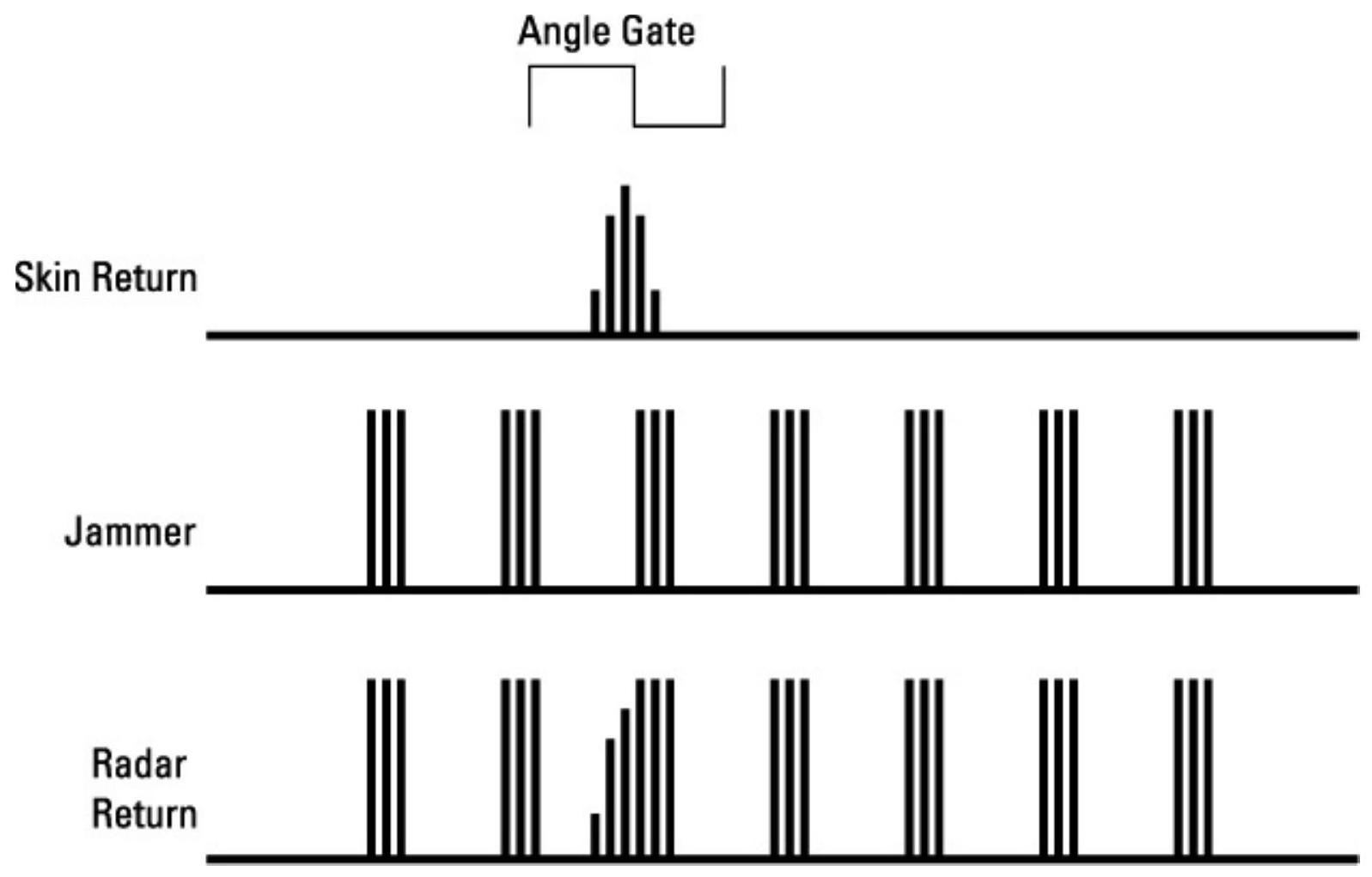
图 3.18 反增益干扰使 TWS 雷达在角度上远离目标。
3.4.7.1 AGC 干扰¶
由于雷达必须在巨大的动态范围内工作,因此必须具备自动增益控制(AGC)。AGC 通过在电路某点测量接收功率水平,并调整电路前端的增益或衰减来平衡测量点的信号强度。为了有效,AGC 电路必须具有快速建立/慢速衰减特性。图 3.19 第一行显示了圆锥扫描雷达回波生成的正弦功率-时间曲线。如果在回波中加入一个强窄带干扰信号,高功率脉冲将捕获 AGC,从而显著降低圆锥扫描天线产生的正弦信号,如图 3.19 第二行所示。实际上,正弦信号的降低程度远大于图中所示,使得雷达无法在角度上跟踪目标。
3.4.7.2 其他角度干扰示例¶
还有其他角度干扰示例,例如反增益可用于对抗瓣切雷达。然而,上述角度干扰的描述展示了角度干扰的工作原理,并将支撑我们后续的讨论。需要强调的一点是,上述示例适用于那些必须移动天线并接收多个回波脉冲以实现角度跟踪的雷达。有一类重要的雷达称为单脉冲雷达,它们能够从每个回波脉冲中获取完整的角度信息。这类雷达及其对应的干扰技术将在第 3.4.9 节中介绍。
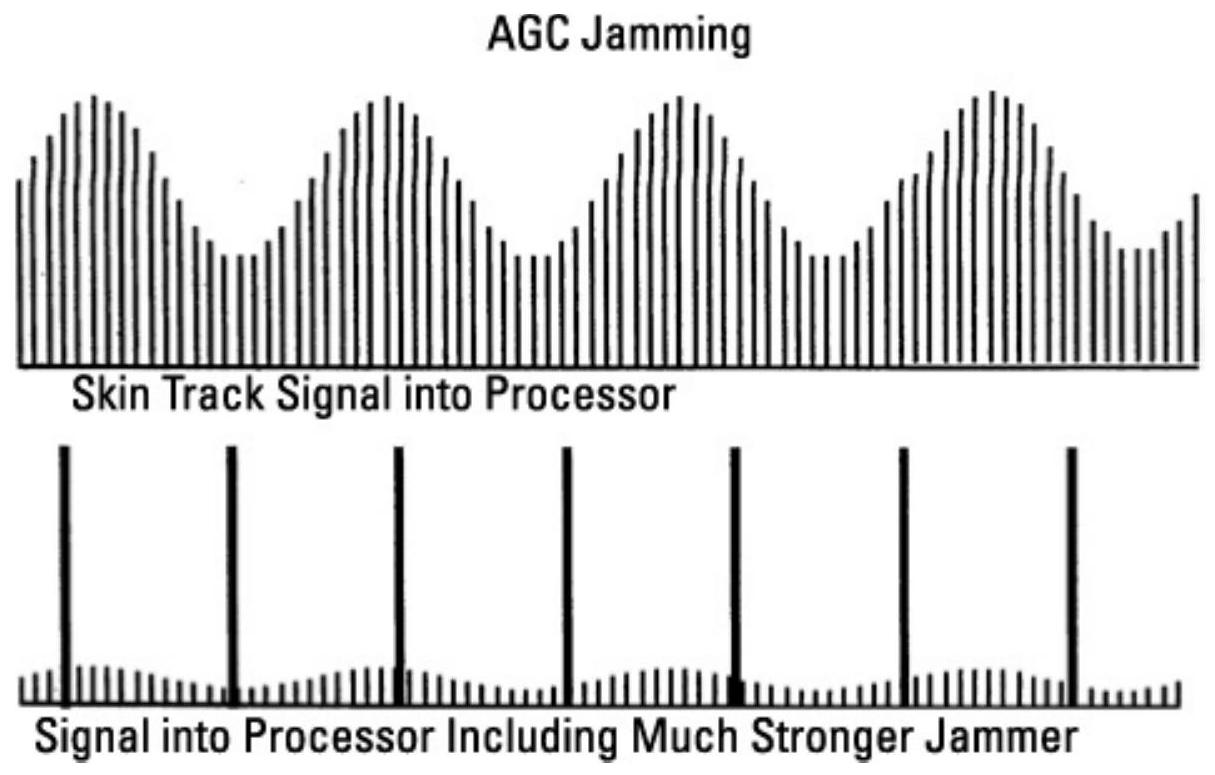
图 3.19 AGC 干扰在目标信号调制速率附近产生强窄脉冲,以捕获雷达的 AGC。
3.4.8 频率门拖引¶
在频率上欺骗雷达通常非常重要。回波信号的接收频率由发射频率和雷达与目标之间距离变化率决定。图 3.20 第一行显示了多普勒雷达回波的信号强度-频率曲线。注意到,雷达的内部噪声出现在回波的低频范围内。此外,还有多个地面回波。如果这是机载雷达,最大的高频(即最高速度)地面回波来自飞机正下方的地面。较弱的回波来自飞越时的地形特征。由于地形特征与飞行路径存在偏角,这些回波的多普勒频率较低。最后,我们看到与雷达和目标之间闭合速度相关的目标回波。雷达将在目标回波频率附近设置速度门,以便跟踪目标。如果干扰机在速度门内注入一个信号,并将该干扰信号从目标回波频率扫离,则雷达将失去对目标的速度跟踪。这种技术称为速度门拖引。
需要注意的是,一些雷达能够通过将距离门拖引引起的距离变化率与回波的多普勒频移进行相关性分析,来区分并抵御距离门拖引干扰。在这种情况下,可能需要同时进行距离门和速度门拖引。

图 3.20 频率门拖引在雷达速度门中注入干扰信号,捕获该门并使其偏离目标回波。
3.4.9 单脉冲雷达干扰¶
在第 3.4.7 节中,我们讨论了对需要从多个回波脉冲确定目标角度的雷达的角度欺骗。现在考虑单脉冲雷达,它们能从每个回波脉冲获取角度信息。单脉冲雷达通过比较多个接收传感器的信号来确定目标角度。图 3.21 仅展示了两个传感器;然而,实际的单脉冲雷达通常有三个或四个传感器,以实现二维角度跟踪。传感器输出在和通道与差通道中组合。和通道用于确定回波信号的强度,差通道提供角度跟踪信息。需要注意的是,差响应通常在和通道 \(3-\mathrm{dB}\) 宽度内呈线性。制导输入为差响应减去和响应。
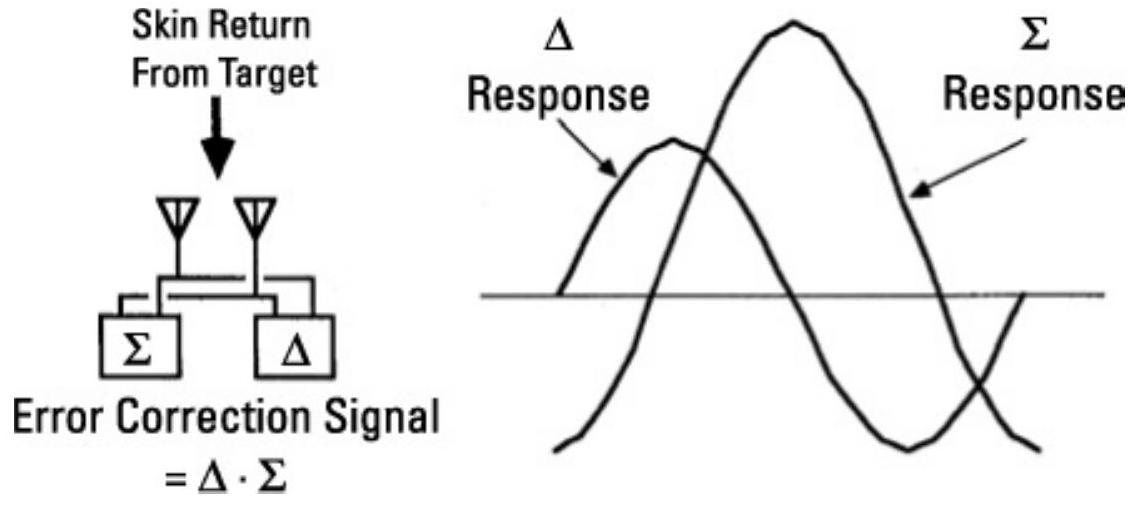
图 3.21 单脉冲雷达通过多个传感器从每个脉冲中获取角度信息。
到目前为止第 3.4 节中展示的干扰技术实际上会提高单脉冲雷达的角度跟踪效果,因为它增强了目标位置接收到的信号强度。然而,仍有一些技术对单脉冲雷达有效,包括:
- 编队干扰;
- 带距离剥夺的编队干扰;
- 交替闪烁(Blinking);
- 地形反射;
- 交叉极化;
- 交叉眼干扰(Cross eye)。
3.4.10 编队干扰¶
如果两架飞机在雷达分辨单元内编队飞行,如图 3.22 所示,雷达将无法分辨它们,而是看到两个真实目标之间的单一目标。该技术的难点在于保持两架飞机始终处于同一个分辨单元中非常具有挑战性。
分辨单元的宽度(即横向)维度为:

图 3.22 编队干扰涉及两架飞机飞入雷达分辨单元内。雷达将“看到”一个位于两个真实目标中点的目标。
其中 \(W\) 为分辨单元宽度(米),\(R\) 为雷达到目标的距离(米),BW 为雷达天线的 \(3-\mathrm{dB}\) 波束宽度。
分辨单元的深度(即纵向)维度为:
其中 \(D\) 为分辨单元深度(米),PW 为雷达脉冲宽度(秒),c 为光速(\(3 \times 10^{8}\) m/s)。
例如,如果目标距离雷达 20 km,雷达脉冲宽度为 \(1 \mu s\),天线波束宽度为 \(2^{\circ}\),则分辨单元宽度为 698 m,深度为 150 m。图 3.23 对比了该雷达在不同目标距离下的分辨单元尺寸。
3.4.11 带距离剥夺的编队干扰¶
自卫干扰由于是从雷达的目标上发射的,会增强单脉冲雷达的角度跟踪。然而,它可以剥夺雷达的距离信息。如果两架飞机以大致相同的功率进行干扰,如图 3.24 所示,雷达将无法在距离上分辨这两个目标,因此它们只需要在分辨单元的横向维度内保持队形,以防止雷达分辨出两个目标。在远距离时,分辨单元的宽度远大于其深度,因此这种技术可以简化队形保持。
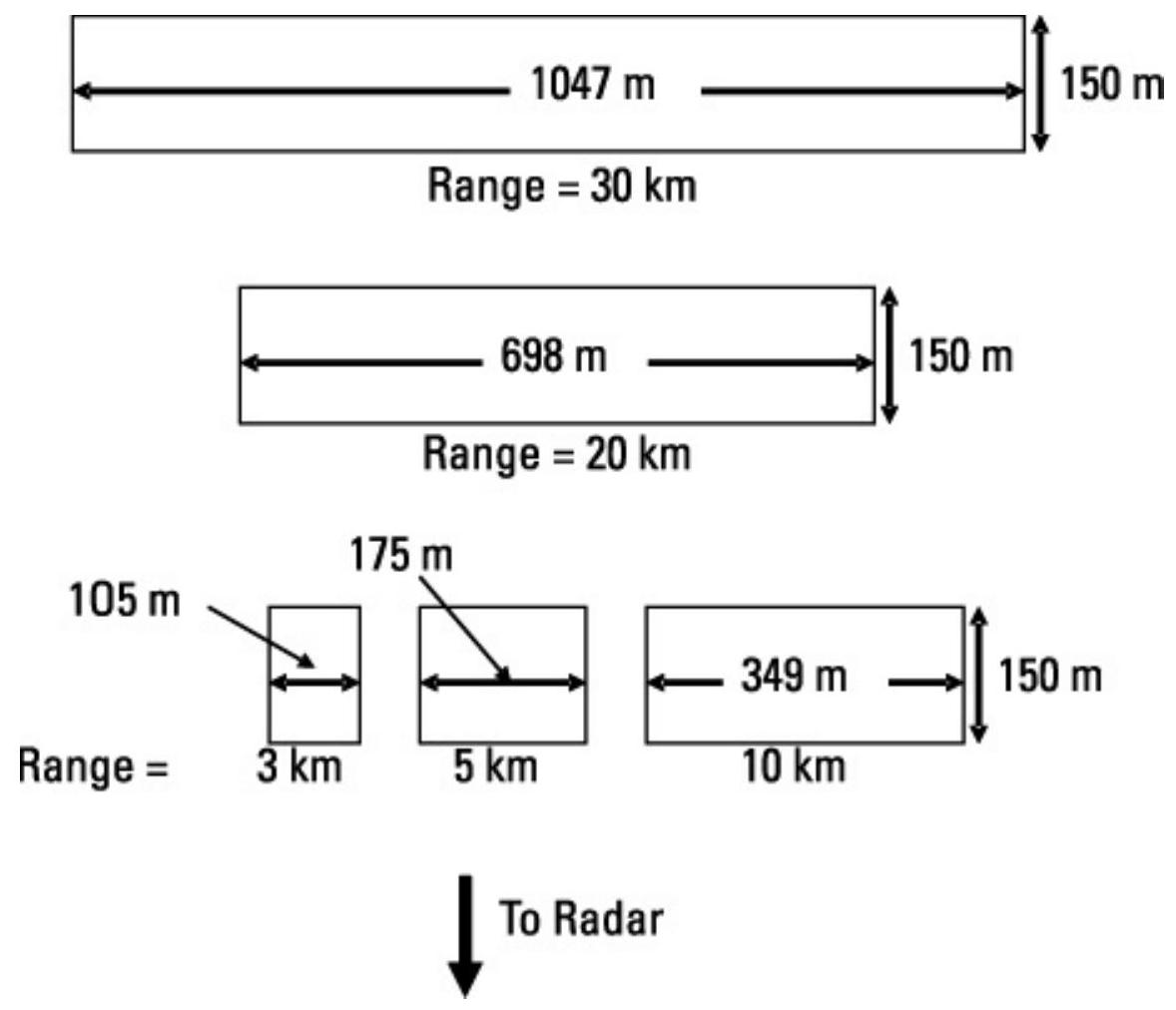
图 3.23 雷达分辨单元的形状随雷达到目标的距离显著变化。本例为 \(1 \mu\) s 脉宽和 \(2^{\circ} \mathrm{BW}\)。
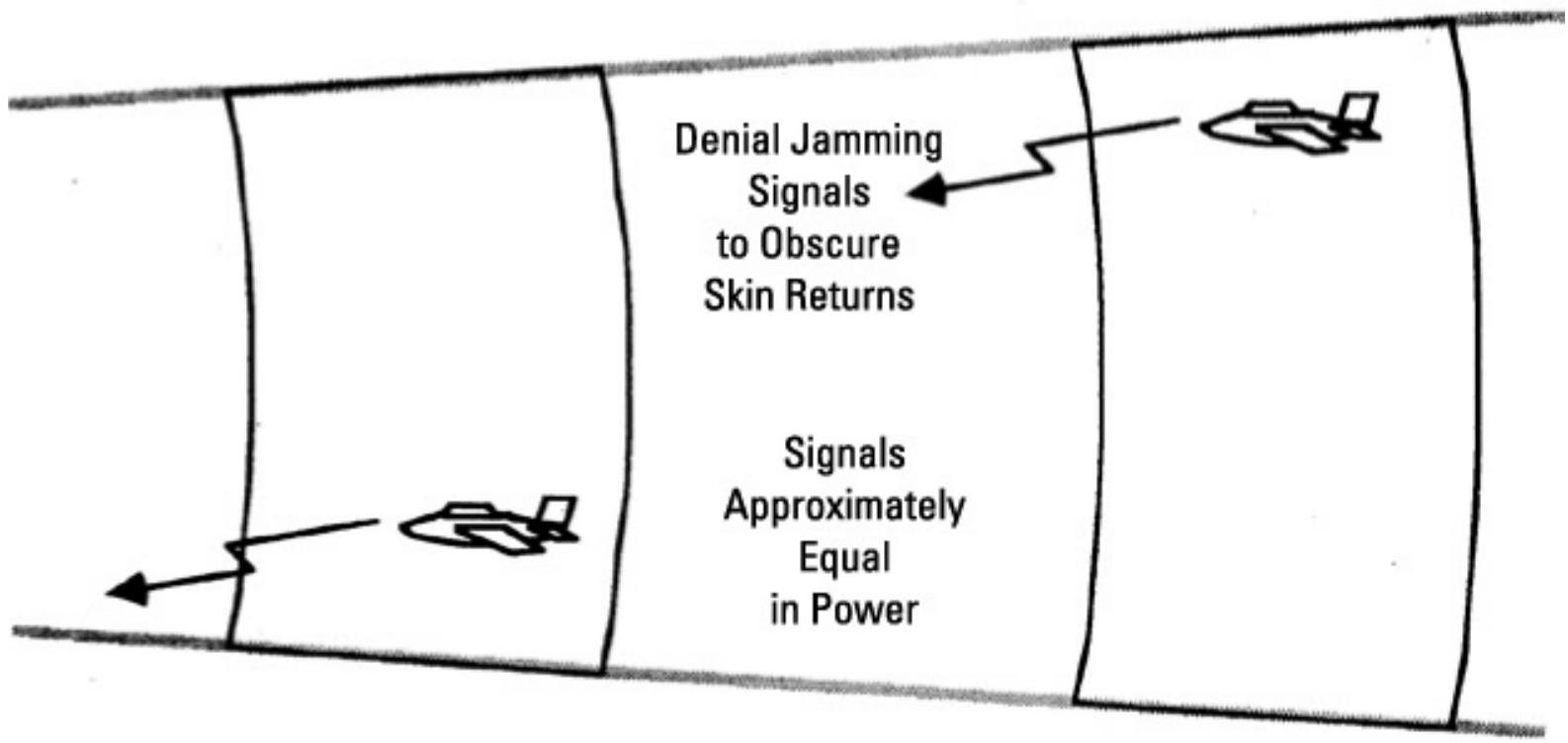
图 3.24 如果每架飞机均等干扰以剥夺雷达的距离信息,则两架飞机只需保持横向队形。
3.4.12 交替闪烁干扰(Blinking)¶
如果两架位于雷达分辨单元内的飞机以中等频率(0.5 至 10 Hz)交替发射干扰,如图 3.25 所示,那么攻击导弹将被交替引导至其中一架飞机。当导弹接近两架飞机时,其重定向的角度偏差将越来越大。由于导弹的角度制导带宽有限,它将无法跟随目标的快速切换,最终飞偏。
3.4.13 地形反射干扰(Terrain Bounce)¶
如果一架飞机或导弹通过指向其下方海面或陆地的天线,以较大增益重发雷达信号(如图 3.26 所示),则单脉冲跟踪器将被迫跟踪到受保护平台的下方。这将导致武器偏离目标。
3.4.14 交叉极化干扰¶
如果抛物面雷达天线反射器具有显著的前向几何结构,它将产生一些小的波瓣(称为 Condon 波瓣),其极化方向与主天线馈源交叉。一般来说,天线曲率越大,Condon 波瓣越大。如图 3.27 所示,如果雷达被一个极强的、交叉极化的干扰信号照射,这些波瓣可能会占主导地位。
图 3.28 展示了交叉极化干扰机的工作原理。它在两副正交极化的天线上接收雷达信号。在图中,一个是垂直极化,另一个是水平极化。垂直极化天线接收到的信号以水平极化重发,而水平极化天线接收到的信号以垂直极化重发。这使得干扰机无论接收信号的极化如何,都会产生与之交叉极化的信号。所产生的干扰信号被放大到足够的水平,以产生 20 至 40 dB 的 \(\mathrm{J} / \mathrm{S}\)。
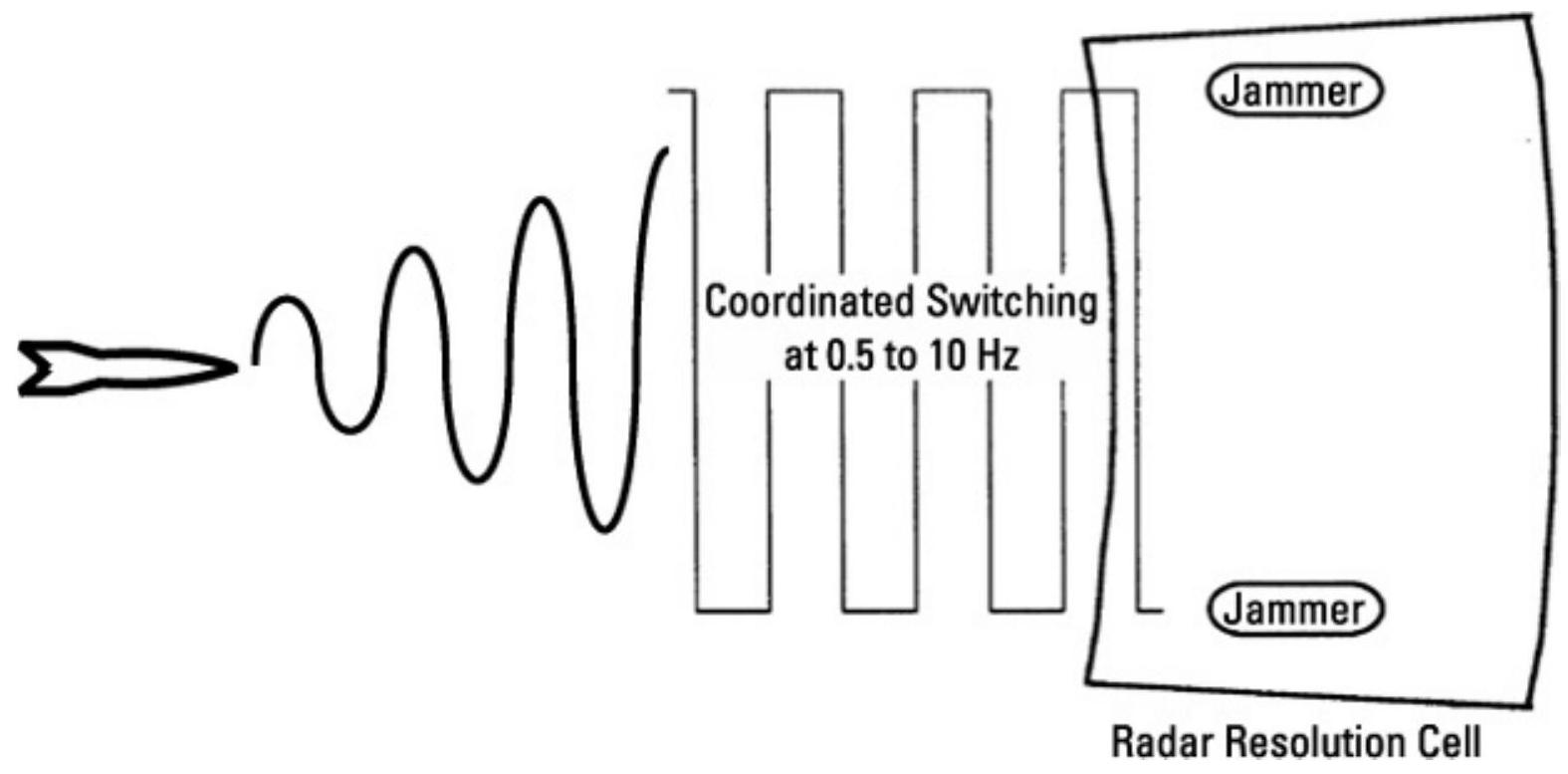
图 3.25 交替闪烁干扰通过两架飞机上的干扰机交替发射,迫使跟踪雷达在目标间切换,直到导弹制导系统过载。
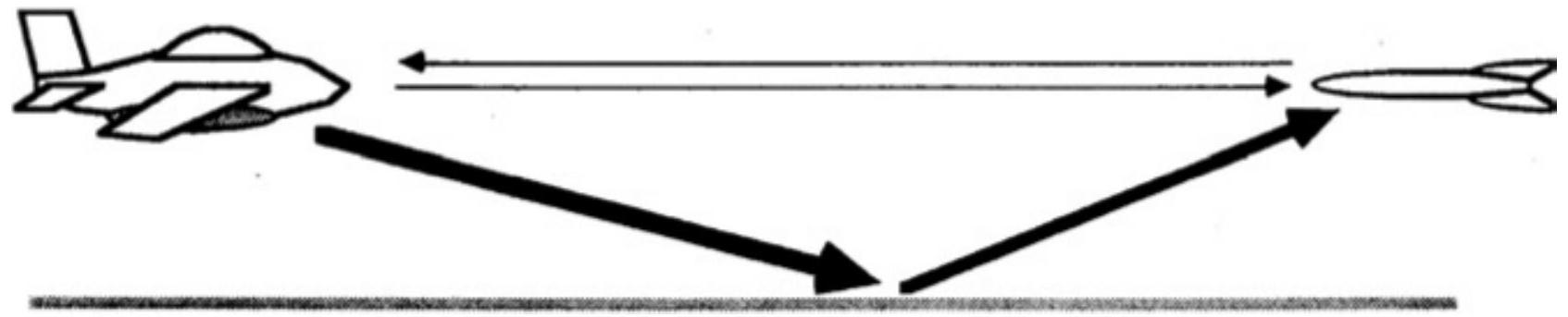
图 3.26 地形反射干扰通过从地球或水面反射强回波,使雷达跟踪到目标下方。
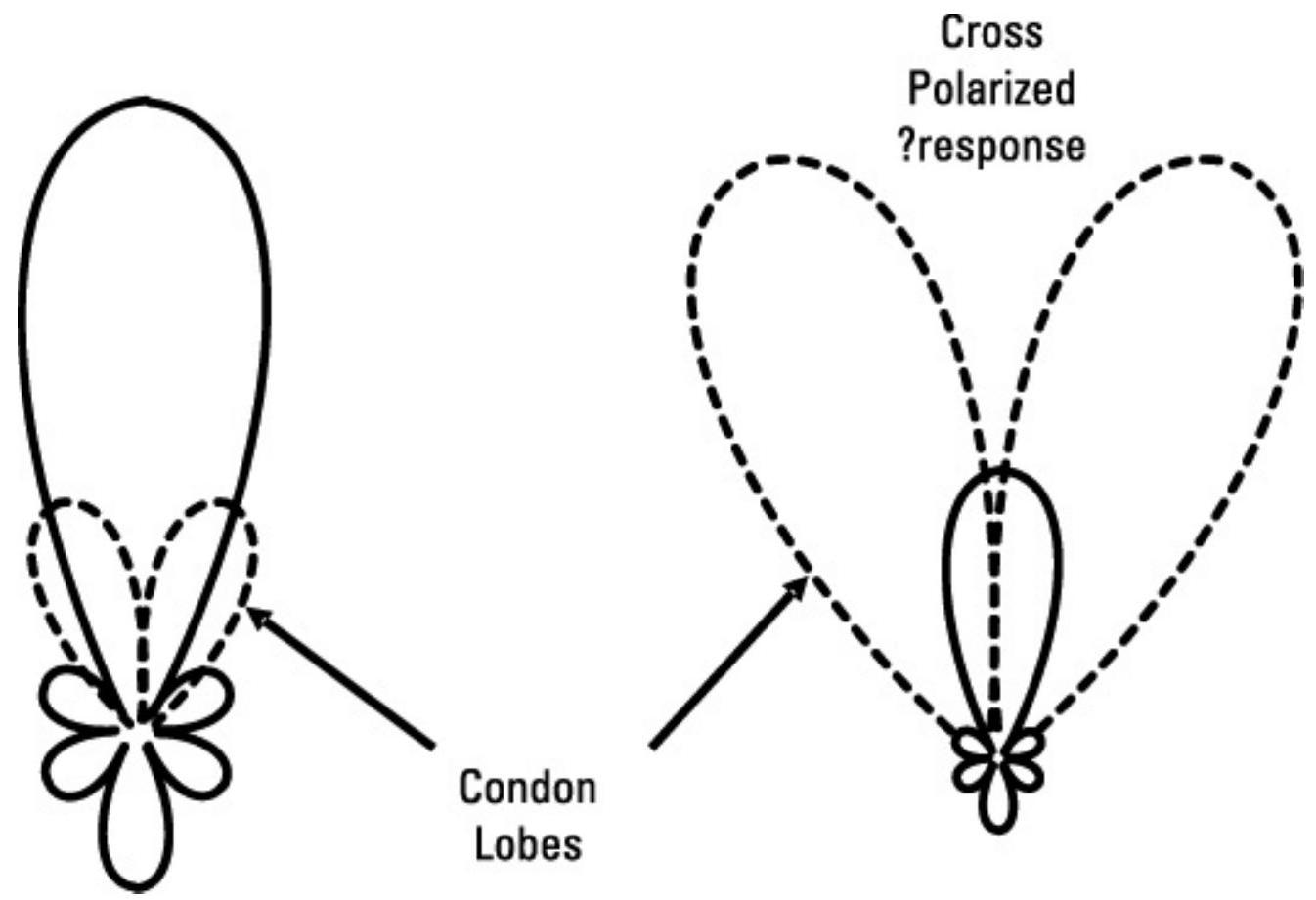
图 3.27 一些雷达天线具有交叉极化波瓣,其方向偏离主极化轴。
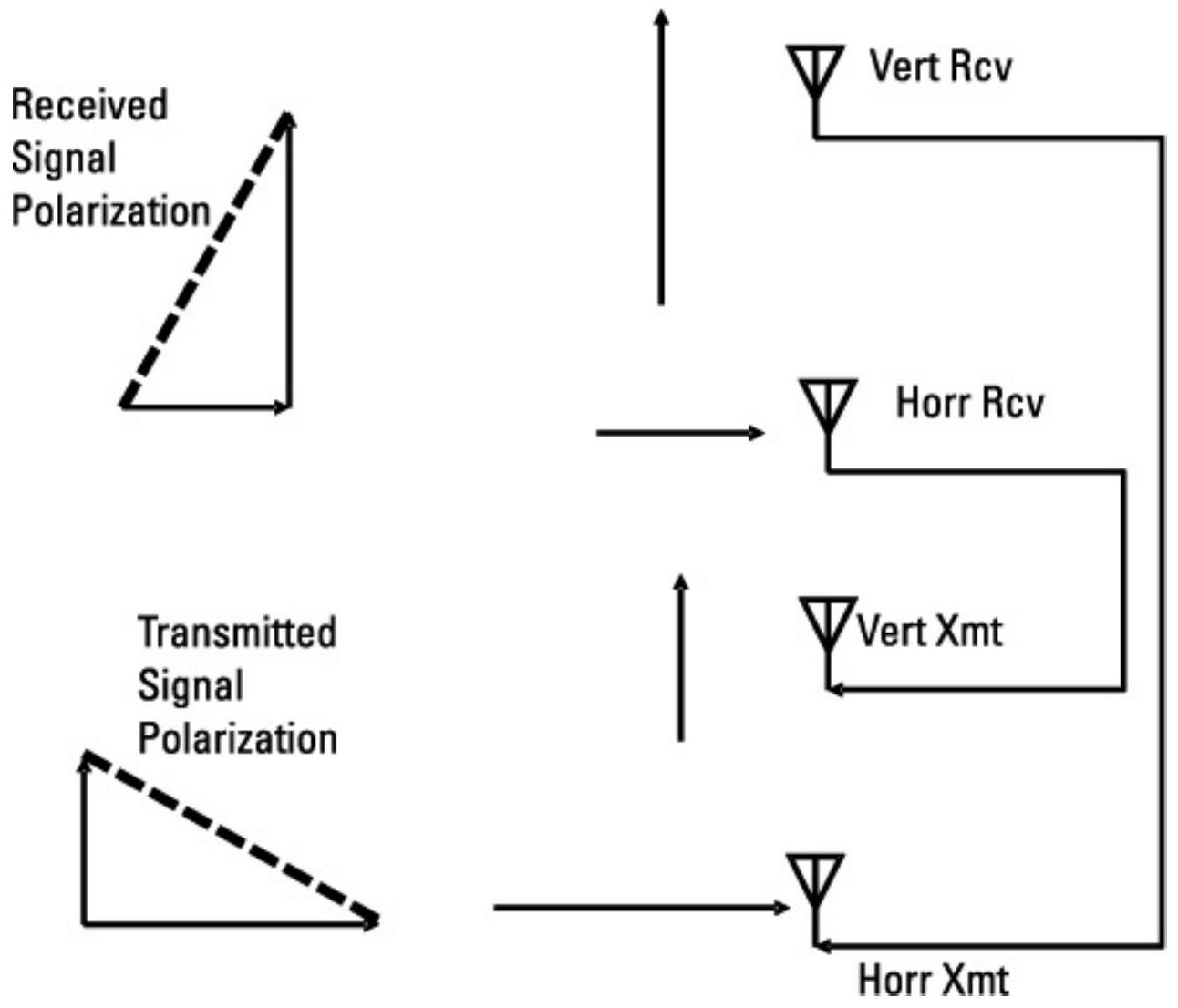
图 3.28 交叉极化干扰产生强交叉极化回波信号,使雷达在其 Condon 波瓣中跟踪目标。
当强交叉极化信号到达雷达时,它会捕获其中一个 Condon 波瓣。雷达随后将调整天线,使被捕获的 Condon 波瓣对准目标。这将导致雷达失去对目标的跟踪。
一般来说,这种干扰对具有平板相控阵天线的雷达无效,因为其前向几何不足以产生 Condon 波瓣。然而,如果相控阵通过可变照射实现显著波束整形,则可能会产生 Condon 波瓣。
如果雷达天线配备了极化滤波器,则可免疫交叉极化干扰。
3.4.15 交叉眼干扰(Cross-Eye)¶
图 3.29 展示了交叉眼干扰机的构型。点 A 天线接收到的信号被放大 20 至 40 dB 后,由点 B 天线重发。同样,点 B 天线接收到的信号被放大并由点 A 天线重发,但该电路中加入了 \(180^{\circ}\) 相移。为了使干扰机有效,这两条信号路径必须完全等长。由于点 A 和点 B 必须有足够的间距才能有效干扰,因此电缆较长。在温度和频率变化下,保持两条电缆路径的精确平衡极为困难。这两条电缆路径必须在一个电气度以内保持 \(180^{\circ}\) 的相位关系,其电气长度差仅约为 0.1 毫米。
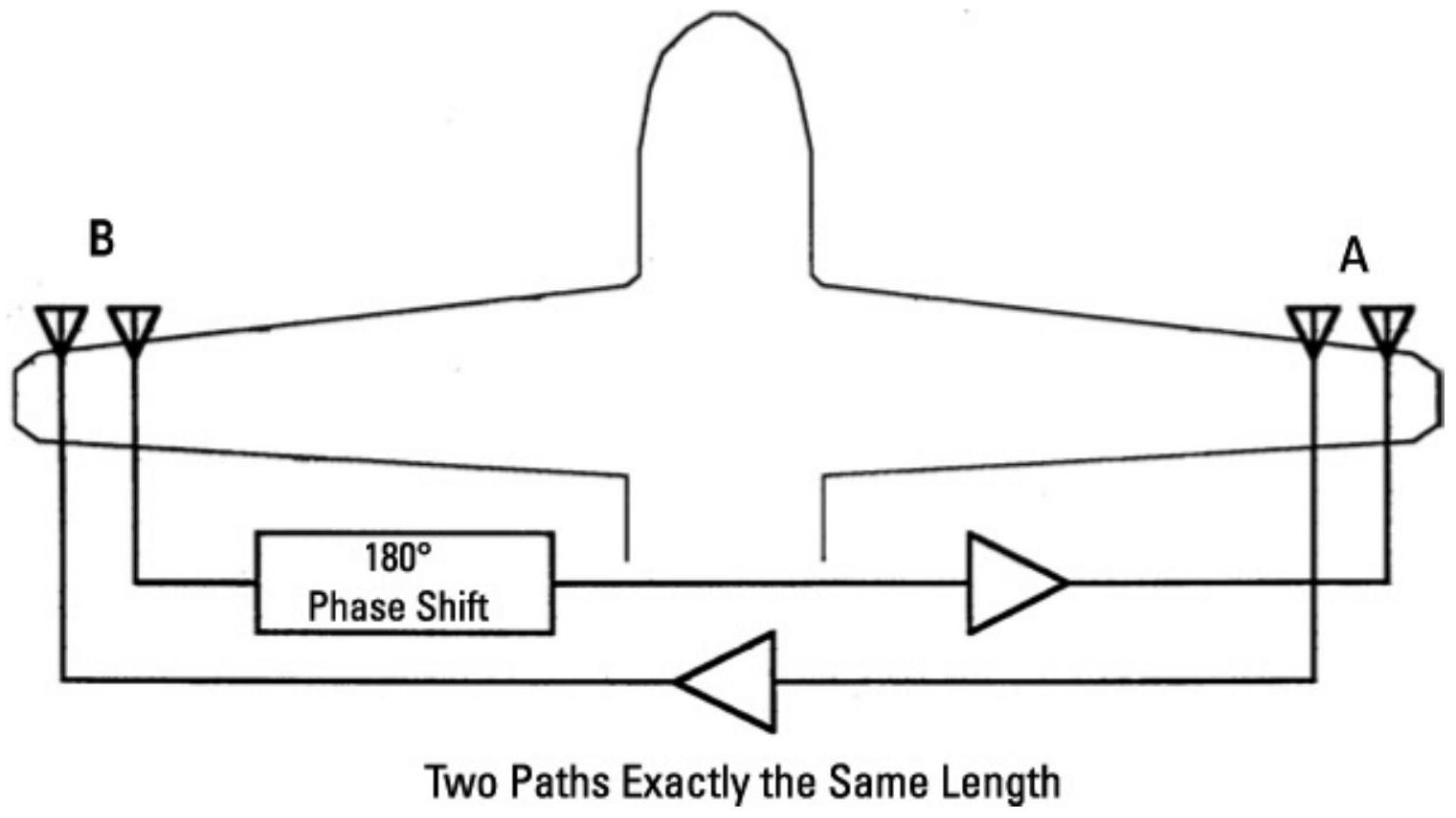
图 3.29 交叉眼干扰将点 A 接收的雷达信号从点 B 发射,同时将点 B 接收的雷达信号从点 A 发射,并施加 \(180^{\circ}\) 相移。
为缓解这一问题,系统可如图 3.30 所示进行配置。纳秒级开关允许在每个位置使用单根电缆连接单个天线,并在(非常小的)箱体内轻松保持相位匹配。开关在每个雷达脉冲的接收过程中多次在相移和非相移分支之间切换。由于雷达接收机必须优化接收雷达脉冲,因此它会对脉冲下方的方波进行平均。这样,来自两副干扰天线的信号将被雷达视为两个同时存在且相位相差 \(180^{\circ}\) 的脉冲。
从雷达到天线 A 再到天线 B 的路径与从雷达到天线 B 再到天线 A 的路径完全等长。这不要求 A-B 基线与干扰机至雷达的路径垂直。因此,雷达将接收到两个相位相差 \(180^{\circ}\) 的信号。如图 3.21 所示,这会在雷达传感器处形成一个零点。其结果是和通道响应低于差通道响应,从而改变了“差 - 和方程”的符号。这将导致雷达将跟踪角度修正偏离目标而不是指向目标。
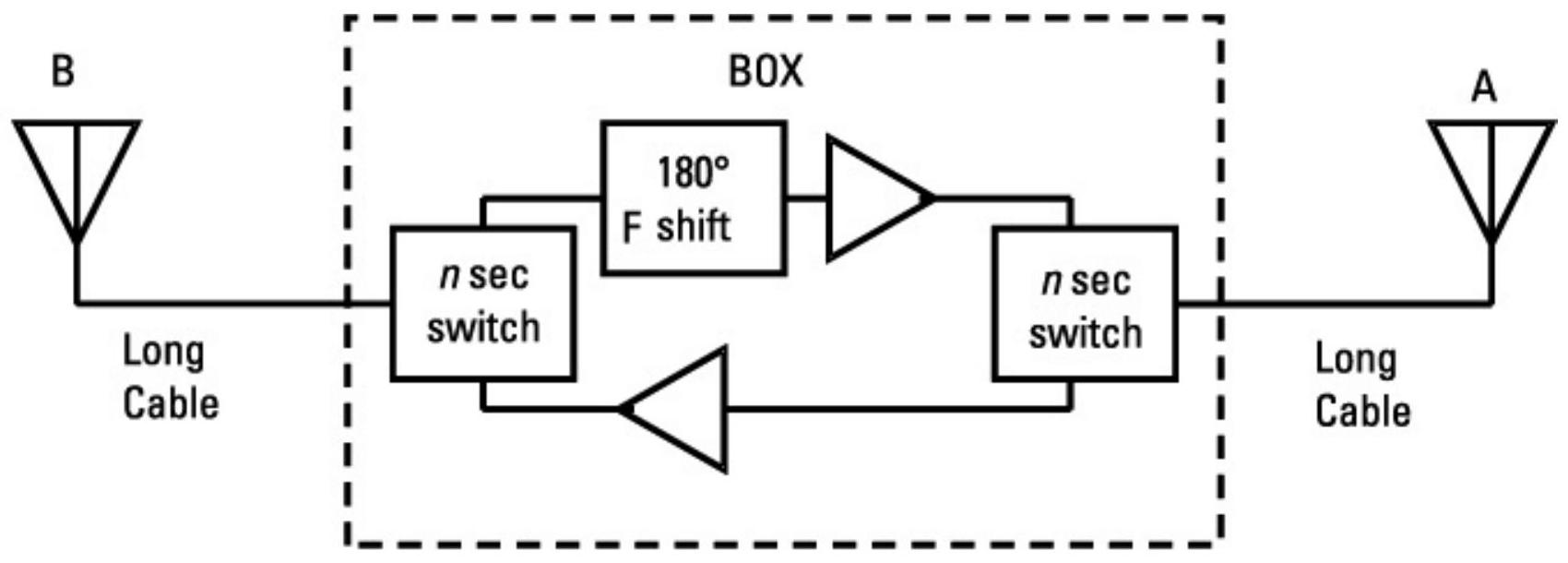
图 3.30 纳秒级开关允许来自每个天线的单根电缆双向分时传输信号,消除了对电缆长度精确匹配的需求。
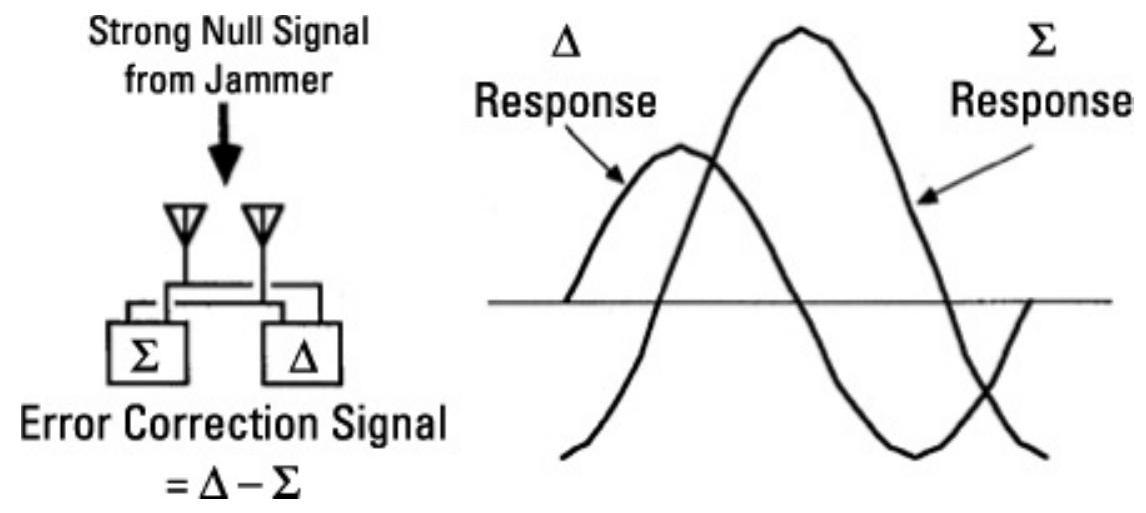
图 3.31 交叉眼干扰形成的零点使和通道响应小于差通道响应,从而反转单脉冲跟踪响应的方向。
当视频摄像机与单脉冲雷达同轴对准时,在施加交叉眼干扰时,它会显示目标以高速离开画面。这是因为单脉冲雷达被迫迅速偏离其预定目标。
交叉眼干扰的效果在文献中常被描述为对回波信号波前的扭曲,如图 3.32 所示。
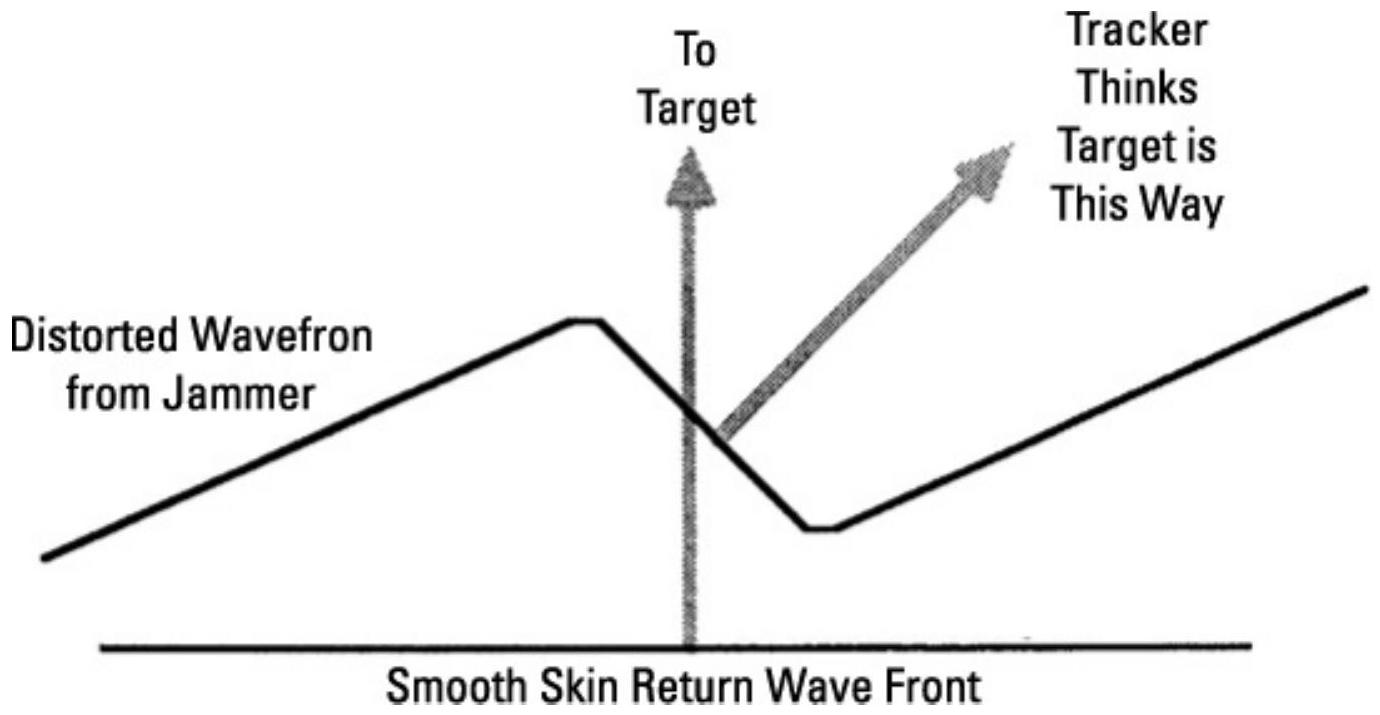
图 3.32 由于相移和非相移信号同时到达单脉冲跟踪传感器,它们形成一个零点,迫使跟踪器偏离目标。
References¶
[1] Schleher, D. C., Electronic Warfare in the Information Age, Norwood, MA: Artech House, 1999. [2] Adamy, D., EW 101: A First Course in Electronic Warfare, Norwood, MA: Artech House, 2001. [3] Adamy, D., EW 102: A Second Course in Electronic Warfare, Norwood, MA: Artech House, 2004. [4] Adamy, D., "EW 101," Journal of Electronic Defense, May 1996-April 1997.