4. 新一代威胁雷达¶
4.1 威胁雷达的改进¶
在过去十年里,新型威胁的发展活动非常频繁。这些新威胁被设计出来是为了克服多年来对传统武器有效的对抗措施。这些新发展包括更强大的武器和雷达。正如第3章所述,本书并不是一份威胁通报。机密来源中有这类信息,并且它们在不断变化。然而,由于这是一本非机密书籍,我们无法在这里获取这些信息。本章的研究方法是从总体上讨论新威胁的技术特征。我们将以通用的方式讨论威胁和威胁雷达的各类变化及其电子战(EW)的影响。关于EW的讨论将聚焦于: - 对EW系统和战术而言,什么已不再可行? - 需要哪些新的EW战术? - 需要哪些新的EW系统能力?
我们不会涉及机密问题,而是讨论一般性的变化。如果某个具体参数发生变化,EW系统需要做出什么响应?本章包含的表格和图表展示了威胁参数在不同水平变化下对EW的影响。这样,当你面对具体的现实问题时,就可以查阅机密来源中某种新一代威胁的参数,并据此确定应对新现实威胁所需的EW装备和战术的具体规格。
话虽如此,但公开文献中也有关于这些新武器和雷达的重要特征,这些特征意味着我们以往开展EW的方式已经不足以应对。
明确地说,威胁发生了必须由EW来对抗的重大变化。我们不能再用过去几十年的方式来开展EW行动。从公开文献可以清楚看到:
- 导弹射程显著增加。这对远程压制干扰产生影响。
- 威胁雷达具备显著的电子防护(EP)能力。这要求新的装备和新的战术。
- 新武器具备改进的隐蔽、射击与快速转移能力。这缩短了反应时间。
- 新威胁雷达的有效辐射功率(ERP)增加。这提高了其干扰信号比(J/S)和突破干扰的距离。
- 雷达处理方式发生了重大变化。这需要更复杂的EW处理任务。
- 许多新威胁配备了有源相控阵。这增加了EW处理的复杂性,同时也影响所需的干扰功率。
另一个新发展是红外寻的导弹的传感器和制导能力显著提升。这要求对热焰弹和红外(IR)干扰机进行重大改进。需要注意的是,这一问题以及红外(IR)频段中EW系统和战术的必要变化将在第9章中讨论。
射频(RF)频谱的EW战术在几个方面发生了变化:
- 远程压制干扰面临重大挑战。
- 自卫干扰受到“被动干扰制导武器”(home-on-jam weapons)的影响。
- 诱饵和其他外挂资源的作用日益增加。
- 电子支援(ES)受到低截获概率(LPI)雷达的影响。
在本章中,我们将讨论电子防护、武器和雷达更新的脉络、新导弹能力(公开文献中)、以及新威胁雷达参数(同样来自公开文献)。然后我们将逐项分析每个预期的威胁升级特征,并展示(通过表格和图表)不同参数值范围如何影响各类EW活动。
本章内容的流程为:
- 电子防护;
- 地空导弹(SAM)升级;
- 目标探测雷达升级;
- 高炮(AAA)升级;
- 所需的新EW技术。
4.2 雷达电子防护技术¶
虽然电子防护(EP)是EW的一个分支,但它与ES或EA不同,通常不涉及特定的EW硬件。它实际上是传感器系统中设计用来降低敌方干扰效果的一些功能。因此我们说,EP并不是保护你的平台,而是保护你的传感器。我们在第6章中讨论了用于保护通信系统的EP技术。本章将讨论雷达EP。
表4.1列出了主要的雷达EP技术以及它们所提供防护的EA技术类型。
在讨论这些技术时,有必要涉及一些相关主题,比如雷达的数据处理方式。你还会看到,我们所称的EP技术有时被纳入雷达是出于其他原因,而防干扰保护只是一个附加收益。在分析这些技术时,你会注意到抗干扰保护的程度依赖于具体的实现细节,并且某些技术能同时应对不止一种干扰方式。
表4.1 电子防护技术
| 技术 | 防护对象 |
|---|---|
| 超低旁瓣 | 雷达探测与旁瓣干扰 |
| 旁瓣抵消 | 旁瓣噪声干扰 |
| 旁瓣消隐 | 旁瓣脉冲干扰 |
| 抗交叉极化 | 交叉极化干扰 |
| 脉冲压缩 | 诱饵与非相干干扰 |
| 单脉冲雷达 | 多种欺骗干扰技术 |
| 脉冲多普勒雷达 | 箔条与非相干干扰 |
| 前沿跟踪 | 距离门拉脱 |
| Dicke-Fix | 自动增益控制(AGC)干扰 |
| 突破干扰模式 | 各类干扰 |
| 频率捷变 | 各类干扰 |
| 脉冲重复频率抖动 | 距离门拉入与覆盖脉冲 |
| 被动干扰制导模式 | 各类干扰 |
4.2.1 有用的资源¶
一些有用的参考文献包括一本推荐给希望深入研究电子防护技术数学基础的教材 [1],以及另一本有助于理解雷达运行的书籍 [2]。
4.2.2 超低旁瓣¶
图4.1展示了典型雷达天线的增益图形。注意到增益随角度变化以两种方式显示。上图是增益对角度的极坐标图。如果你访问天线制造商的网站并查阅某款天线的增益图,你会看到类似的一系列曲线。这些曲线是通过将天线置于消声室并在转台上旋转而得到的。消声室的锥形部分放置了一个经过精确校准的发射天线,且消声室的所有表面均覆盖射频吸收材料。因此,转台上的待测天线仅接收来自发射机的直达波,天线和其他地方的反射波都被消声室墙面吸收。如果将待测天线在水平面内旋转\(360^{\circ}\),所接收到的功率水平与其指向发射天线方向上的天线增益成比例。显示的相对接收功率曲线就是天线的水平方向图。然后,天线可以在转台上重新定向\(90^{\circ}\)并旋转,以确定垂直方向图。网站上可能会提供跨多个频率和不同平面的完整曲线族。
图中下方的曲线展示了横轴为视线方向偏角,纵轴为增益。在该曲线上定义了波束中心(boresight)增益和第一旁瓣的相对水平。波束中心和旁瓣增益通常用dBi(相对各向同性的分贝)表示,而相对旁瓣电平则用分贝表示。
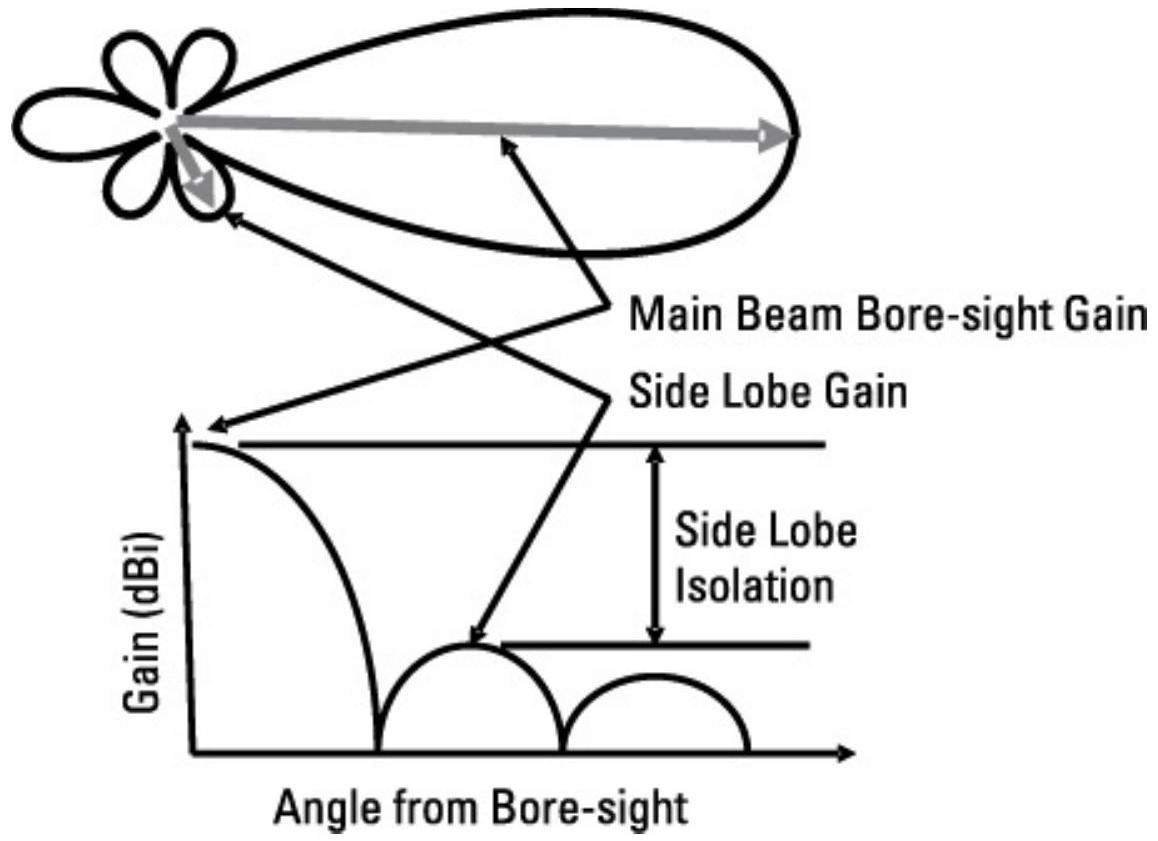
图4.1 天线旁瓣使得雷达能从任意方向被探测和干扰。
增益图形通常是相对于主波束中心增益定义的。波束中心被定义为天线预期指向的方向,这几乎总是天线在发射或接收时的最大增益方向。
这种增益图形在波束中心附近是一个\(\sin e(x)/x\)函数。在主波束边缘有一个零点,其他方向存在旁瓣。超过前一两个旁瓣后,旁瓣主要由结构反射决定,通常还会有一个较大的后瓣。旁瓣之间的零点远比旁瓣窄,因此如果考虑平均旁瓣电平,就可以合理估算在雷达主瓣之外EW交互中遇到的天线发射或接收增益。
“超低旁瓣”没有明确的定义,它仅意味着天线的旁瓣远低于普通天线的水平。Schleher [1] 给出了一些合理的范围,尽管具体天线可能有所差异:
- “普通”旁瓣比主波束峰值(或波束中心)增益低13至30 dB,旁瓣峰值平均增益为0至-5 dBi;
- “低”旁瓣比波束中心增益低30至40 dB,峰值增益为-5至-20 dBi;
- “超低”旁瓣比波束中心低超过40 dB,增益小于-20 dBi。
4.2.3 降低旁瓣电平的EW影响¶
要探测尚未锁定目标的雷达存在,接收机(例如雷达告警接收机)必须具有足够的灵敏度(包括天线增益),以接收到雷达旁瓣信号。在这种情况下,接收机灵敏度要求接收到足够的信号功率来确定信号的到达方向,并支持信号参数分析,以判断雷达类型和工作模式。如图4.2所示,与旁瓣截获问题相关的雷达ERP是发射机输出(有时称为电子管功率)与平均旁瓣增益的乘积。雷达信号强度随着距离平方衰减。因此,旁瓣增益减少10 dB(即旁瓣方向ERP降低10 dB)会使得在固定接收机灵敏度水平下的探测距离减少\(\sqrt{10}\)倍(即3.16);20 dB旁瓣隔离会使探测距离减少10倍。需要注意,第5章将对无线电传播模型进行完整讨论。

图4.2 拦截接收机在远离天线主瓣方向时接收到的信号因雷达平均旁瓣隔离而降低。
正如第3.3.3节所讨论的,远程压制干扰通常是向雷达的旁瓣发射,因为一个干扰机(例如EA-6B飞机吊舱)通常会同时干扰多个雷达。如图4.3所示,远程压制干扰信号比(J/S)是干扰机与雷达的相对ERP、目标距离(\(R_{T}\))的四次方与干扰机至雷达距离(\(R_{J}\))平方之比、以及雷达天线平均旁瓣增益(\(G_{S}\))与波束中心增益(\(G_{M}\))之比的函数。因此,在其他条件不变时,旁瓣增益降低10 dB会使得特定J/S水平的干扰距离减少3.16倍;20 dB旁瓣隔离会使远程干扰距离减少10倍。
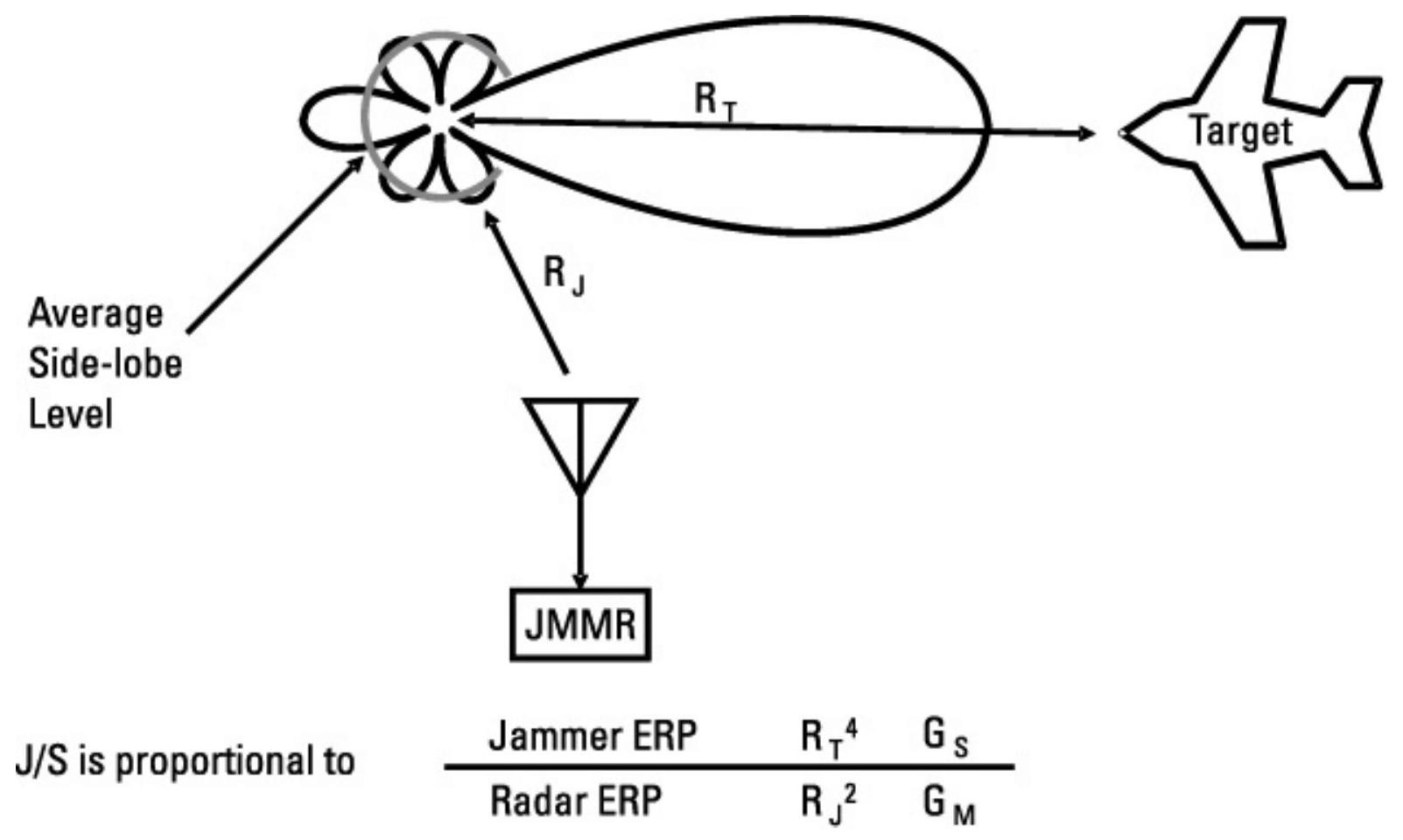
图4.3 旁瓣干扰机实现的J/S因雷达天线的旁瓣隔离而降低。
4.2.4 旁瓣抵消¶
如图4.4所示,旁瓣抵消器(SLC)需要一个辅助天线,该天线接收来自主雷达天线重要旁瓣方向的信号。这些是靠近主波束的旁瓣。辅助天线在旁瓣方向上的增益比主天线波束的旁瓣更大。因此,雷达可以判断信号来自旁瓣方向,并将其区分出来。
这种技术也被称为相干旁瓣抵消(CSLC),因为(干扰)信号在进入雷达接收机前通过相干抵消被削弱。如图4.5所示,辅助天线接收到的干扰信号被用来生成一个副本,该副本相位偏移180电度。生成相位偏移信号的过程需要某种锁相环电路,为了实现高质量的相位控制(即非常接近\(180^{\circ}\)),必须使用窄带宽环路。需要注意的是,宽带宽环路响应快,但高质量锁定需要窄带宽环路,因此响应较慢。窄带宽环路要求信号是连续的,例如用于远程噪声干扰机的噪声调制CW信号。必须理解的是,生成的相位偏移信号与干扰信号的相位越接近\(180^{\circ}\)反相,进入雷达接收机的干扰信号就被削弱得越多。
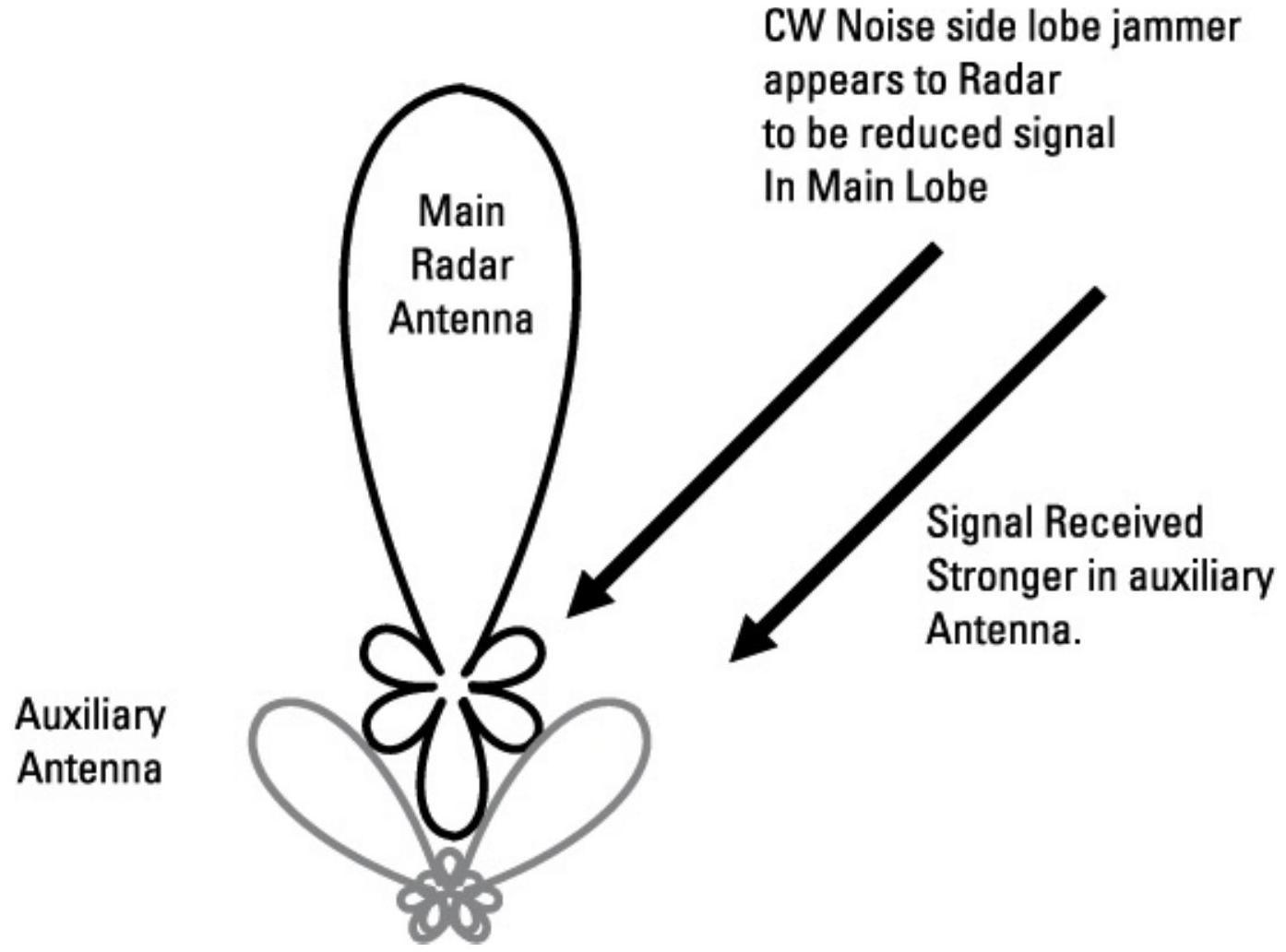
图4.4 相干旁瓣抵消器去除那些在天线旁瓣中强于主波束的CW信号。
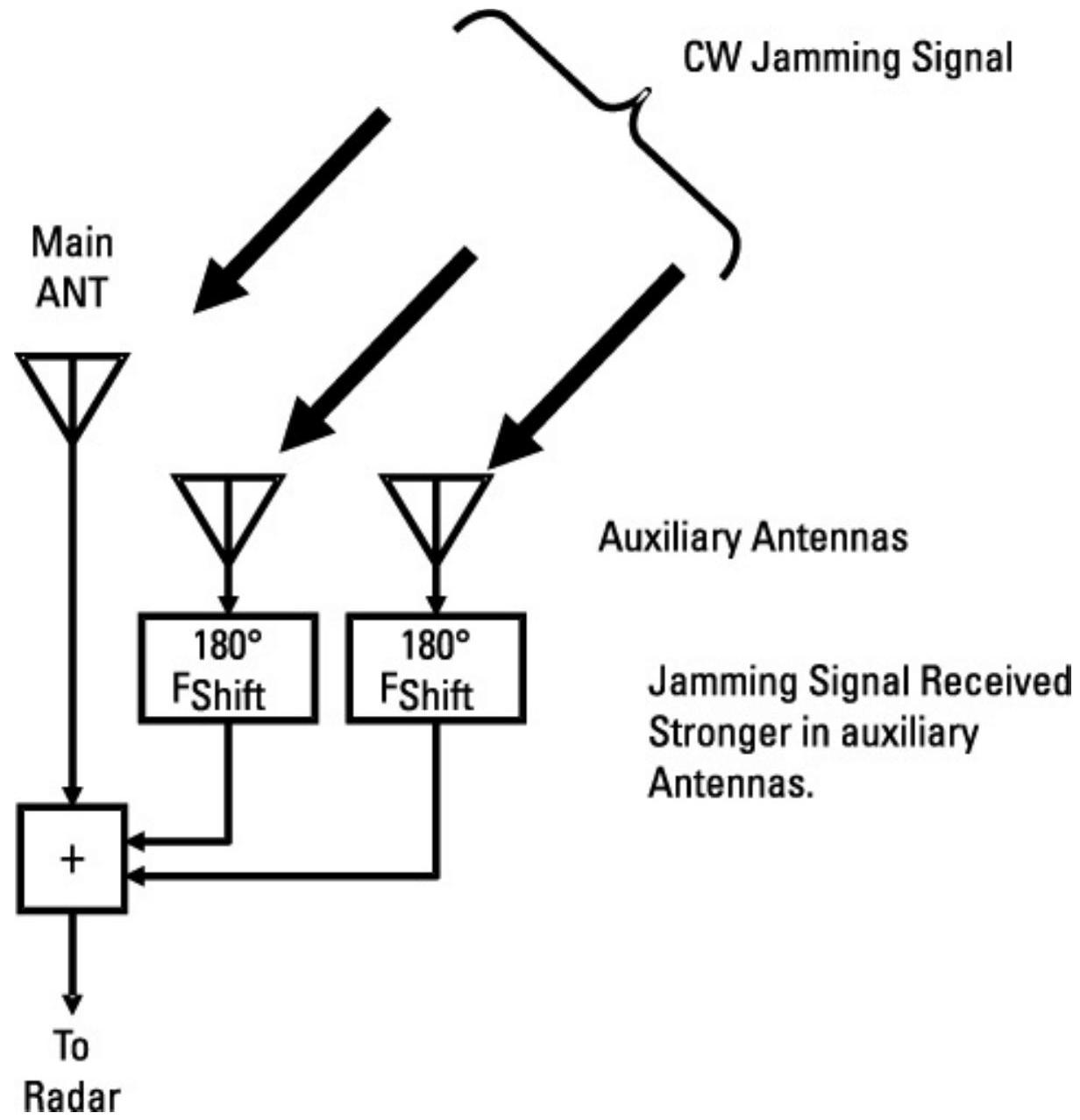
图4.5 来自辅助天线的输入与主天线输出相加并反相\(180^{\circ}\)。
每个被抵消的干扰信号都需要一个单独的天线和移相电路。由于图4.5中有两个辅助天线,该雷达能够抵消两个CW旁瓣干扰机。
有趣的是,脉冲信号的傅里叶变换(即从频域观察脉冲信号)具有大量离散的谱线,如图4.6所示。图上部分显示了时域中的脉冲信号(示波器显示),图下部分显示了频域中的同一信号(频谱分析仪显示)。需要注意的是,频率响应的主瓣宽度为\(1/\mathrm{PW}\),其中PW是时域中的脉宽。同时注意到,谱线的间隔等于脉冲重复频率(PRF)。PRF=\(1/\)PRI,其中PRI是时域中的脉冲重复间隔。因此,将单个脉冲信号发射到由旁瓣抵消器保护的雷达旁瓣中,可以触发多个相干旁瓣抵消电路,从而使CSLC对噪声干扰无效。这也是有时需要在旁瓣噪声干扰中加入脉冲信号的原因。
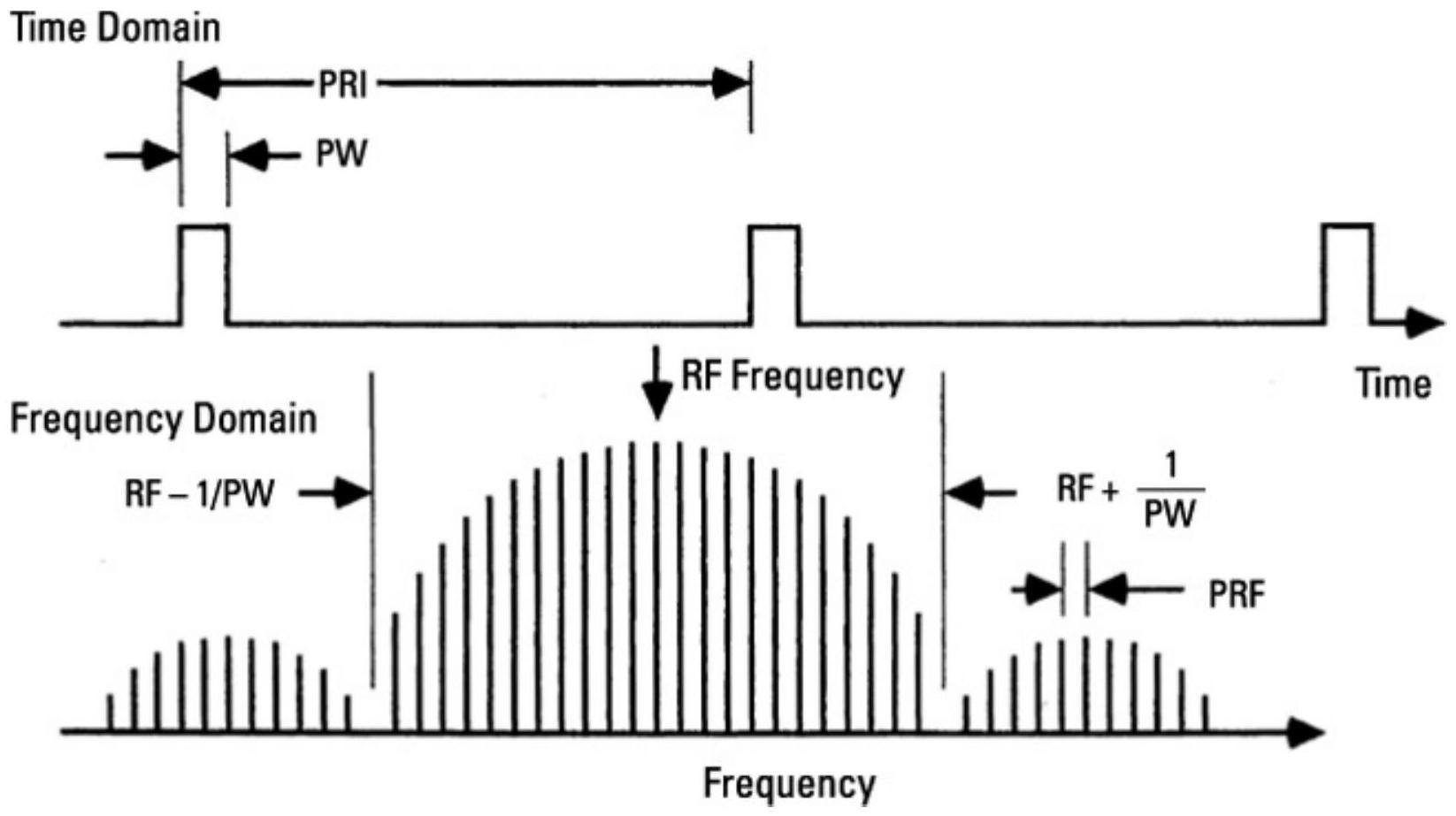
图4.6 在频域中观察时,脉冲信号具有许多谱线。
4.2.5 旁瓣消隐¶
旁瓣消隐器(SLB)(见图4.7)与旁瓣抵消器类似,它也使用一个覆盖主要旁瓣角域的辅助天线,如图4.8所示。不同之处在于,它旨在减弱旁瓣脉冲干扰的影响。如果辅助天线接收到的脉冲信号强度大于主雷达天线接收到的强度,雷达就知道这是旁瓣干扰信号,而不是来自自身发射信号的回波。随后,雷达通过图中的电路在干扰脉冲期间关闭接收机的输入。
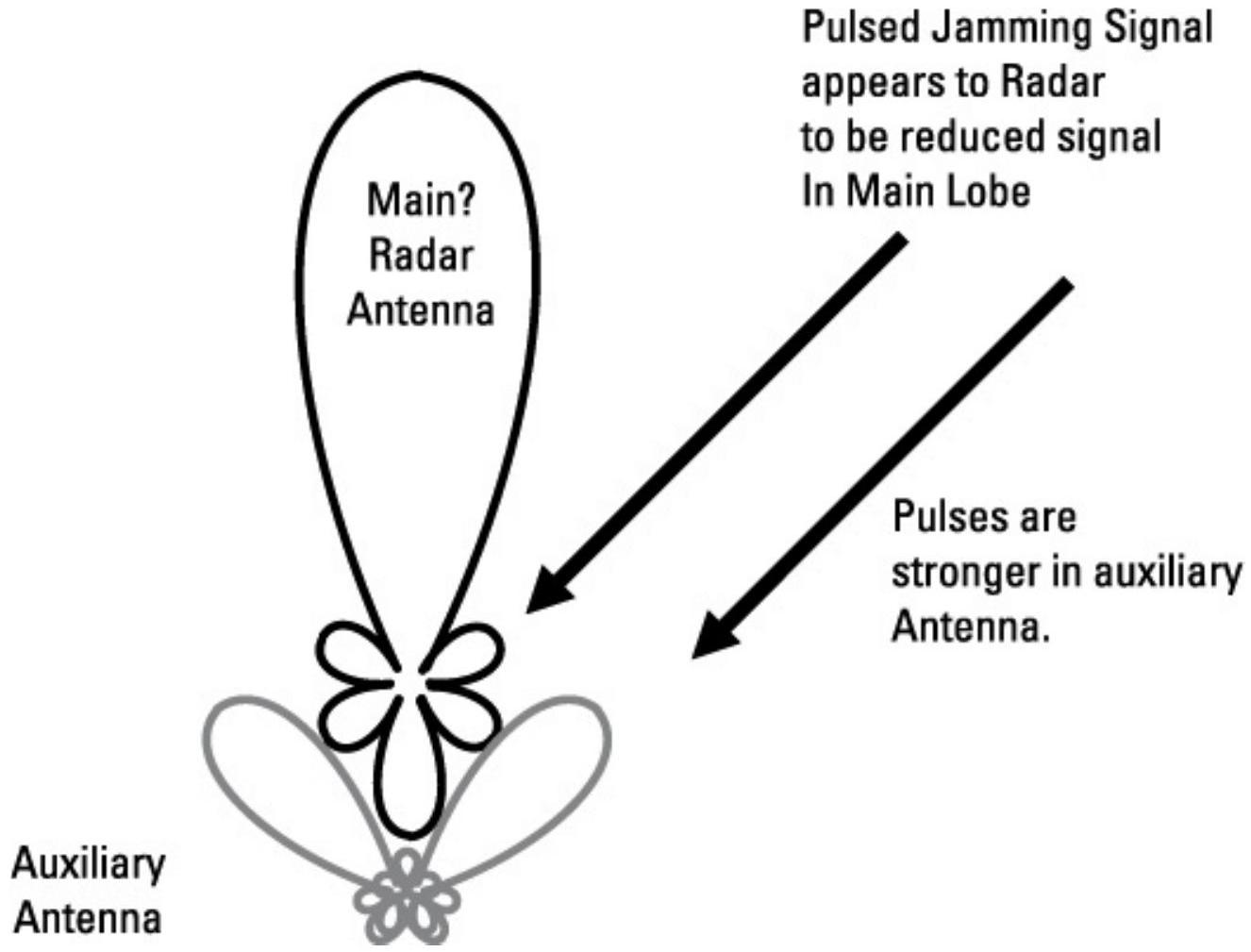
图4.7 旁瓣消隐器去除那些在天线旁瓣中强于主波束的脉冲信号。
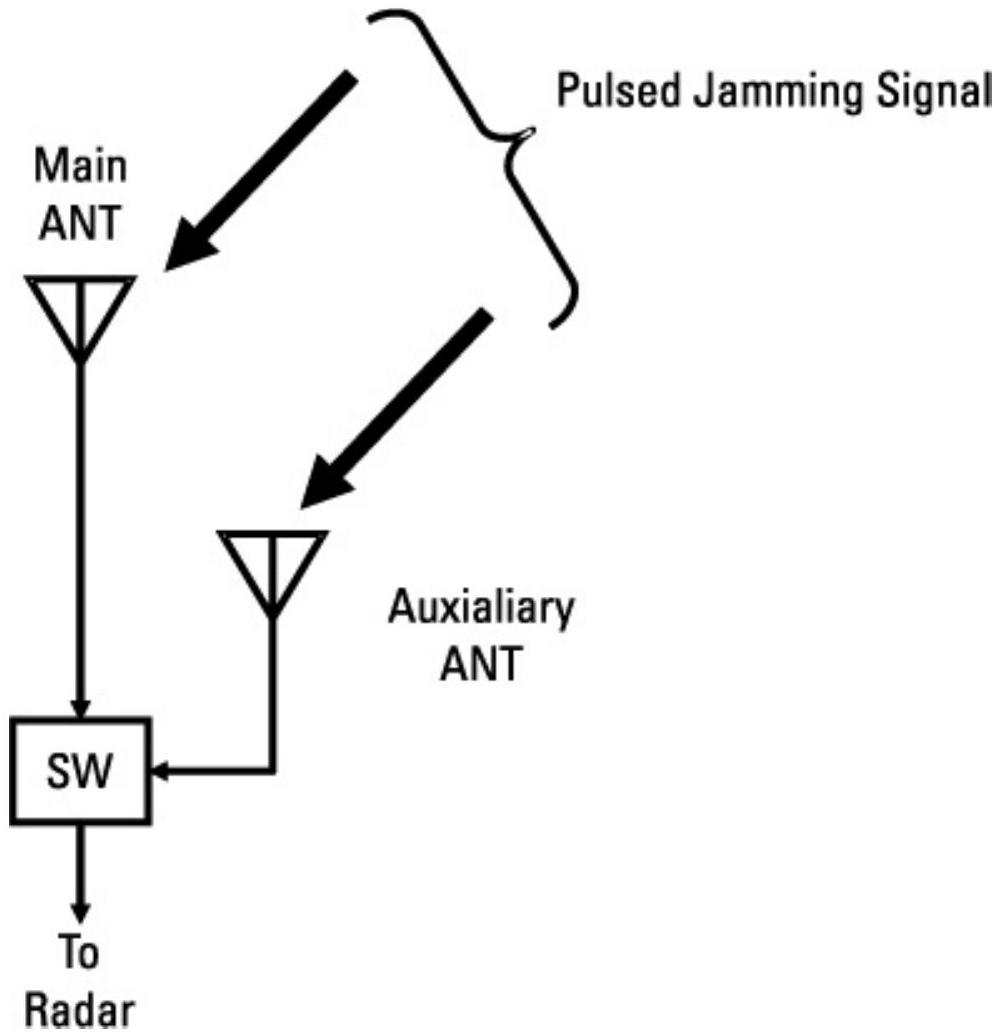
图4.8 在辅助天线中强于主天线的脉冲期间,主雷达天线的输出被消隐。
这种类型的EP在任何脉冲信号接收机中也很有用,例如某些控制链路和某些敌我识别(IFF)系统接收脉冲。这些系统可能会受到虚假脉冲干扰,而SLB可以将其消除。
该技术给雷达带来的问题是:在其旁瓣中存在任何脉冲的时间段内,它无法接收自己的回波信号。因此,干扰机可以利用覆盖脉冲来使雷达(或数据链路或IFF)失效,即在雷达需要接收回波脉冲时将其消隐。由于旁瓣干扰机(例如远程干扰机)不在目标位置,它无法在微秒精度上知道敌方脉冲的时序,因此无法将脉冲直接叠加在敌方回波脉冲上。这要求旁瓣覆盖脉冲足够长,以涵盖这种时间不确定性。
4.2.6 单脉冲雷达¶
单脉冲雷达从每一个回波脉冲中获取到达方向信息。由于这一特性使某些欺骗干扰无效,因此它可以被视为一种EP技术。需要注意的是,单脉冲雷达的运行已在第3章中讨论。
诸如距离门拉脱或覆盖脉冲的干扰技术提供了距离欺骗,但由于它们从目标方向生成强脉冲,反而增强了单脉冲雷达的角度跟踪。同样,反增益干扰等角度欺骗技术会生成强脉冲来迷惑雷达跟踪算法,但也会增强单脉冲角度跟踪。这些干扰技术已在第3章中讨论。
总体而言,角度欺骗比距离欺骗更强。雷达通常可以在毫秒级内重新获取距离,而显著的角度拉脱则需要雷达返回捕获模式。这可能导致角度重新获取时间长达数秒。
箔条云或诱饵由于能够形成一个真实的、可跟踪的目标,对单脉冲雷达非常有效。
单脉冲雷达通过调整天线角度,使多个馈源接收到的功率保持平衡来指向目标,如图4.9所示。有效的角度干扰会迫使雷达天线因干扰信号而向错误的方向转动,从而破坏馈源的功率平衡。例如,交叉极化干扰会使雷达将其交叉极化的Condon瓣指向目标。
4.2.7 交叉极化干扰¶
交叉极化干扰已在第3.4.14节中讨论过,但为了更好地理解交叉极化Condon瓣,可以尝试如下操作:手中拿一支铅笔,将其朝右倾斜\(45^{\circ}\),然后以\(45^{\circ}\)角度将手移向墙壁,直到铅笔接触到墙面。接着沿着铅笔若被墙反射后的方向移动手。你会注意到此时铅笔在运动方向上朝左倾斜\(45^{\circ}\)。墙面的正向几何和铅笔的对角角度使得铅笔相对于手向前运动的角度发生了\(90^{\circ}\)的变化。
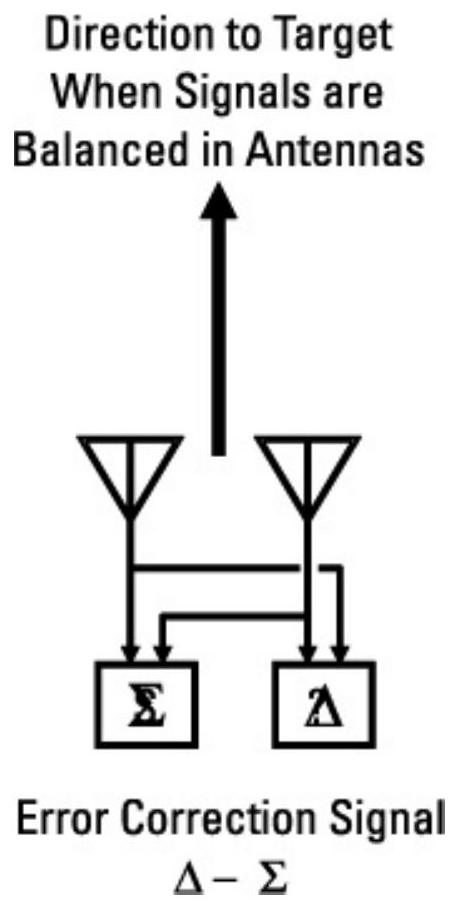
图4.9 单脉冲雷达具有多个天线馈源,并通过两个接收信号的差值与和的归一化来生成天线指向校正。
现在考虑图4.10中抛物面反射器右上部分接收到的垂直极化信号。反射器的正向几何导致一个(较弱的)水平极化反射指向天线馈源,因为这部分反射器与信号极化大约成\(45^{\circ}\)角。这个效应会产生每个Condon瓣。
在他那套优秀但高度技术化(现已绝版)的三本应用电子对抗(ECM)著作中,Leroy Van Brunt 对交叉极化干扰进行了详细讨论 [3]。他指出,交叉极化干扰既可与同频干扰结合,也可与噪声干扰结合,并且对探测雷达和跟踪雷达都有效,包括双波束的SA-2跟踪扫描雷达,其波束之间相互交叉极化。
除了第3章描述的双通路转发型交叉极化干扰机外,还有一些干扰机可以感知来波的雷达信号极化,并利用信号发生器生成交叉极化响应,如图4.11所示。
如果双通道转发型交叉极化干扰机无法实现足够的天线隔离,Van Brunt指出可以使用时间门控来将两个交叉极化信号相互隔离。他在书中提出的定时方法早于现代超高速开关的出现(这些开关在第3.4.15节关于交叉眼干扰的讨论中出现)。时间门控交叉极化技术在当今技术条件下效果应更佳。
4.2.8 抗交叉极化¶
具有降低对交叉极化信号敏感性或降低Condon瓣特性的功能的雷达被称为具备抗交叉极化EP。如图4.12所示,具备交叉极化隔离的雷达其Condon瓣非常小。一个雷达天线反射器若只是大型抛物面的一小部分,则其馈源相对于反射器直径距离较远,反射器正向几何较小(因此Condon瓣较低)。如果反射器是小型抛物面的大部分,则其馈源相对于反射器较近,反射器正向几何较大,从而Condon瓣较高。如果雷达天线是平面相控阵,由于没有正向几何可产生交叉极化响应,通常几乎不存在Condon瓣。然而,如果其阵元在波束形成上存在差分增益,则仍可能产生Condon瓣。天线几何对Condon瓣的影响如图4.13所示。
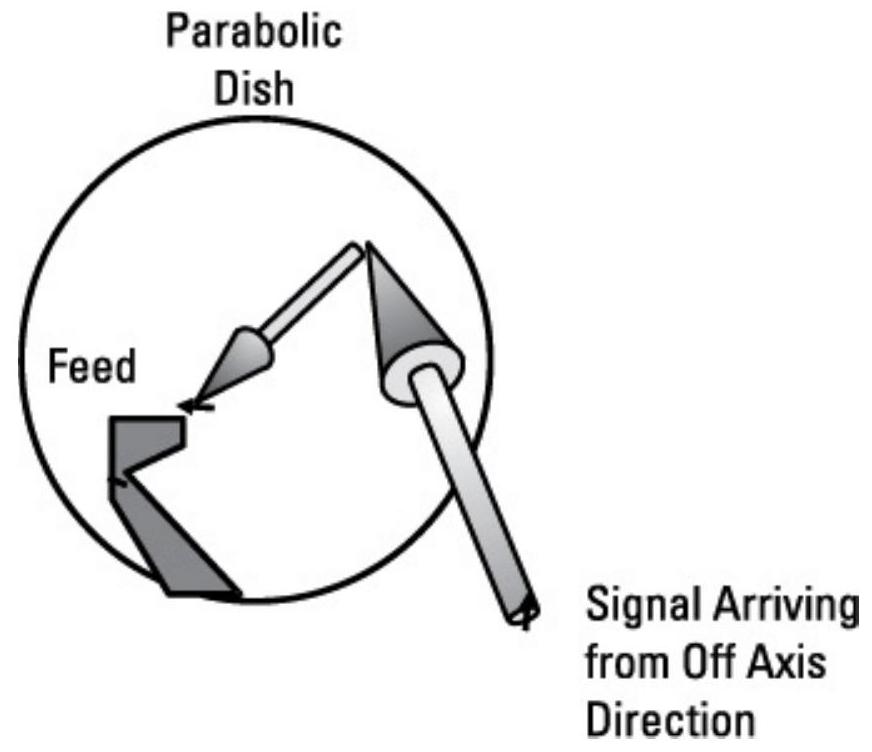
图4.10 抛物面反射器边缘的正向几何导致离轴信号在反射进入天线馈源时极化发生\(90^{\circ}\)变化。
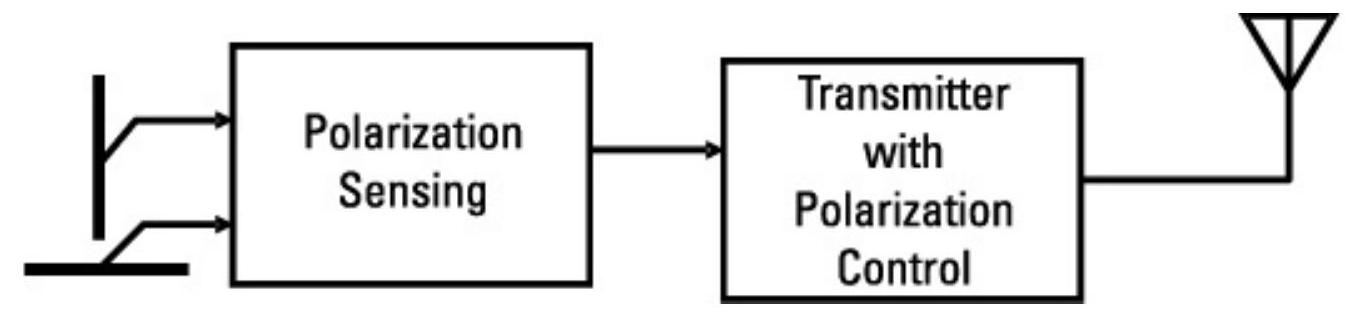
图4.11 一种产生交叉极化干扰信号的技术是感知来波极化,并生成具有正确极化的回波信号。
另一种实现抗交叉极化EP的方法是在天线喉部或馈源,或在相控阵上加入极化滤波器。
4.2.8.1 极化抵消器¶
这一相关的EP技术也在Van Brunt的系列著作中有所描述 [3]。它使用两副正交极化的辅助天线,对单个圆极化或对角极化干扰机非常有效。其电路可以滤除干扰信号中与雷达极化不一致的分量,同时允许雷达的回波信号通过。Van Brunt指出,上述的双交叉极化干扰通道可以击败这一EP技术。
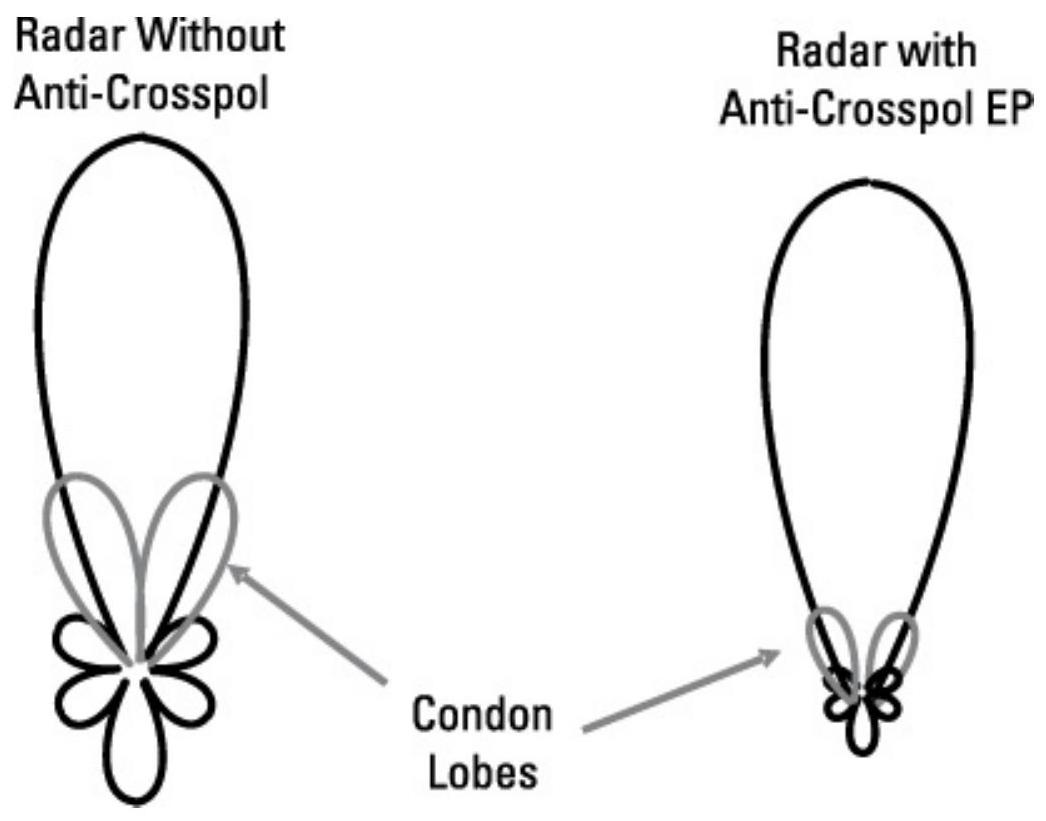
图4.12 具备抗交叉极化EP的雷达,其Condon瓣大幅减弱。
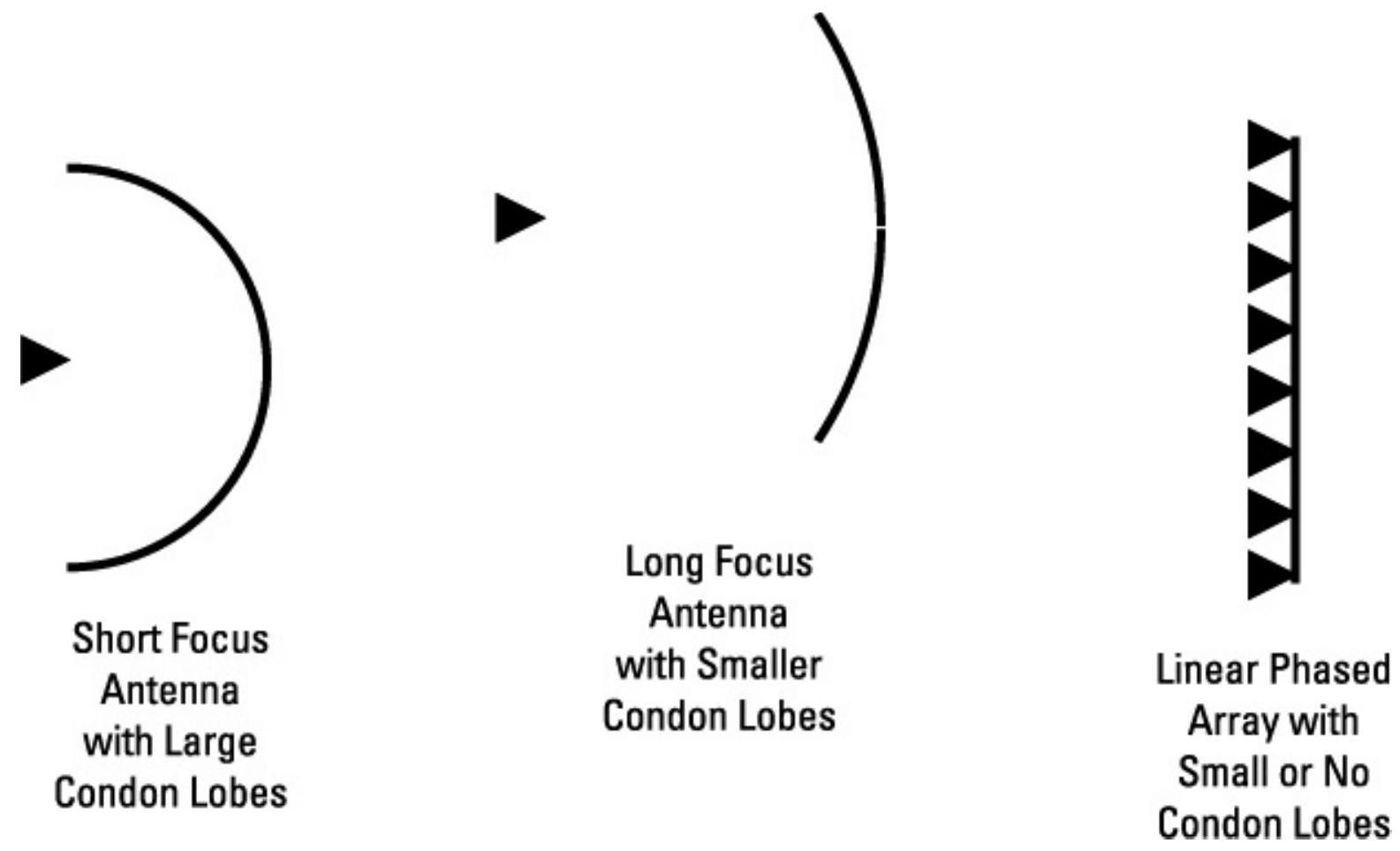
图4.13 雷达天线的几何结构影响其Condon瓣强度。
4.2.9 调频雷达¶
脉冲压缩的目的是降低雷达的距离分辨单元长度,但它也能降低干扰机的有效性,除非干扰机模仿目标雷达的脉冲压缩技术。
脉冲压缩的一种方式是脉内线性调频(LFMOP),也称为调频脉冲(chirp)。调频雷达在每个脉冲内进行线性频率调制。之所以称为chirped,是因为某些接收机接收到这种信号时听起来像鸟鸣。图4.14展示了调频雷达的框图。这类雷达通常被视为远程探测雷达,使用长脉冲以提供必要的信号能量。然而,LFMOP也可用于短程跟踪雷达。需要注意的是,进入雷达接收机的回波脉冲通过压缩滤波器,该滤波器的延迟随频率变化,其斜率与脉冲上的调频相匹配(即频率随时间变化曲线与延迟随频率变化曲线一致)。这样,每个脉冲部分被延迟至脉尾,从而长脉冲在处理后被压缩成一个更短的脉冲。
雷达的分辨单元是雷达无法区分多个目标的区域。图4.15展示了二维下的分辨单元;实际上它是一个三维体积,有点像一个巨大的盆。如图所示,分辨单元的横向维度由天线的3 dB波束宽度决定。距离分辨受雷达脉宽限制(每纳秒脉宽约为1/6米)。长脉冲虽然能量更高,但距离分辨率差。图4.15顶部的深色带展示了LFMOP所带来的距离不确定性减小。因为经过压缩滤波器后,有效脉宽更短,所以距离分辨率得以提升。
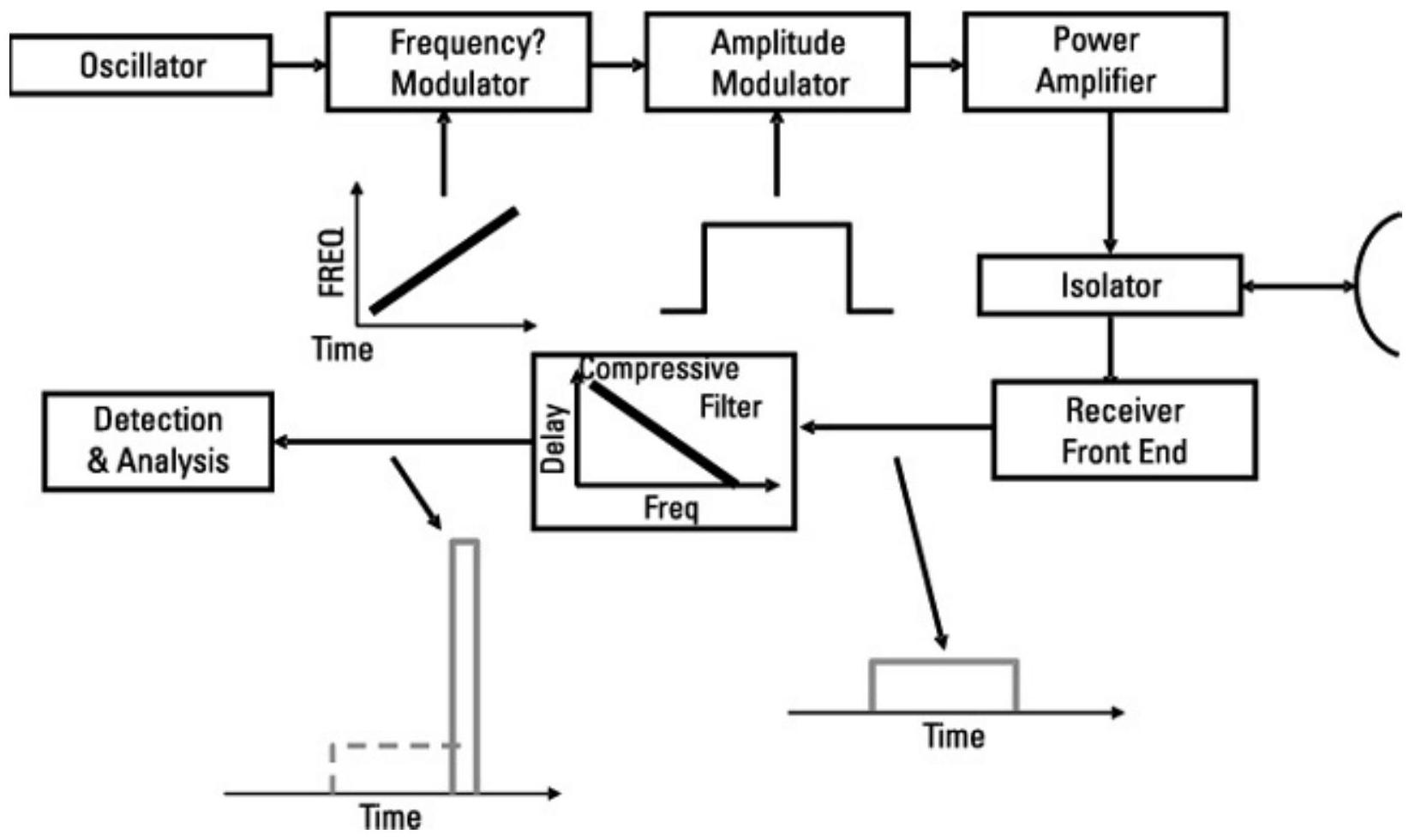
图4.14 调频脉冲在其脉内具有线性调频,使得接收处理时脉冲被压缩。

图4.15 雷达分辨单元由天线波束宽度和脉宽决定,使用LFMOP后,有效脉宽显著减小。
距离压缩量等于调频带宽与脉宽倒数的比值。例如,一个\(10\,\mu s\)脉冲带有2 MHz调频带宽,其距离分辨率将提升20倍。
对干扰的影响如图4.16所示。黑色脉冲是带有LFMOP的雷达信号,它在图右经过压缩滤波器被压缩。灰色脉冲是不带LFMOP的干扰脉冲,如图右所示,其能量没有集中在脉尾。雷达处理只关注压缩脉冲所在的时间段,因此非压缩干扰脉冲的能量显著低于压缩脉冲。这会降低原本可能产生的J/S。J/S降低量等于脉冲压缩因子。在上述例子中,这意味着J/S降低\(13\,\mathrm{dB}\)。
如果干扰机在其干扰信号上加上适当的LFMOP,就能对抗雷达的这一EP特性。干扰机可通过直接数字合成(DDS)或数字射频存储器(DRFM)生成匹配的LFMOP。这两种技术将在第8章讨论。
4.2.10 Barker码¶
带有Barker码脉冲压缩的雷达框图如图4.17所示。其在每个脉冲上加上二进制相移键控(BPSK)调制,并通过抽头延迟线实现脉冲压缩。图4.18顶部展示了一个7比特的最大长度码实例。雷达通常使用更长的码。本例的码为1110010,其中0比特相位相对于1比特偏移\(180^{\circ}\)。当脉冲通过抽头延迟线时,所有抽头上的信号之和通常为0或-1,除非脉冲恰好填满移位寄存器。注意第4、第5和第7抽头具有\(180^{\circ}\)相移,因此当脉冲完全对齐时,所有抽头信号会相干叠加。这会在一个比特时长内产生一个大输出。因此,延迟线后的脉冲有效时长为1比特。这样,脉冲被压缩(距离分辨率得到改善),压缩因子等于每个脉冲上的码长度。
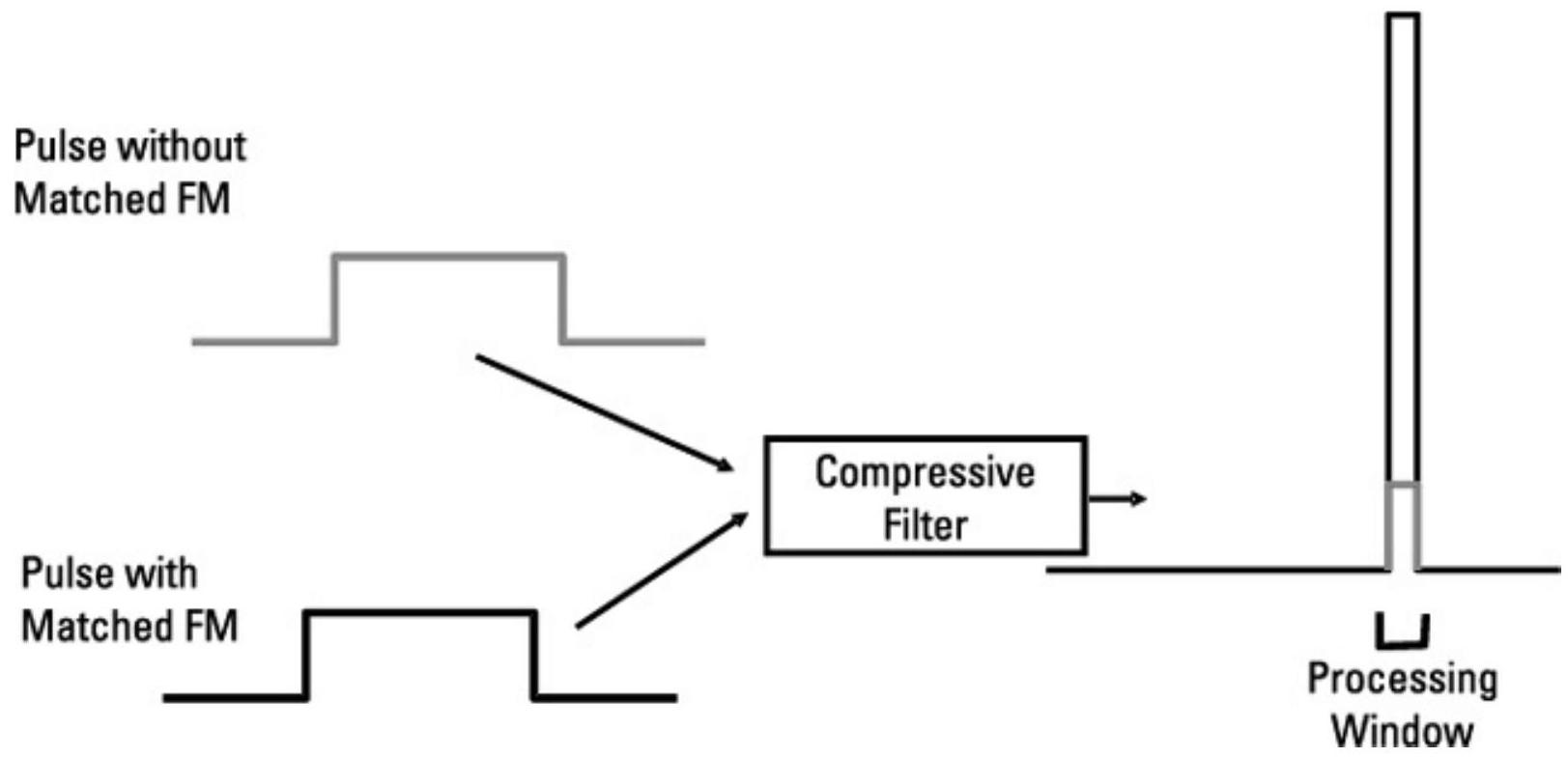
图4.16 除非干扰信号具有正确的频率斜率,否则有效J/S会因压缩因子而降低。
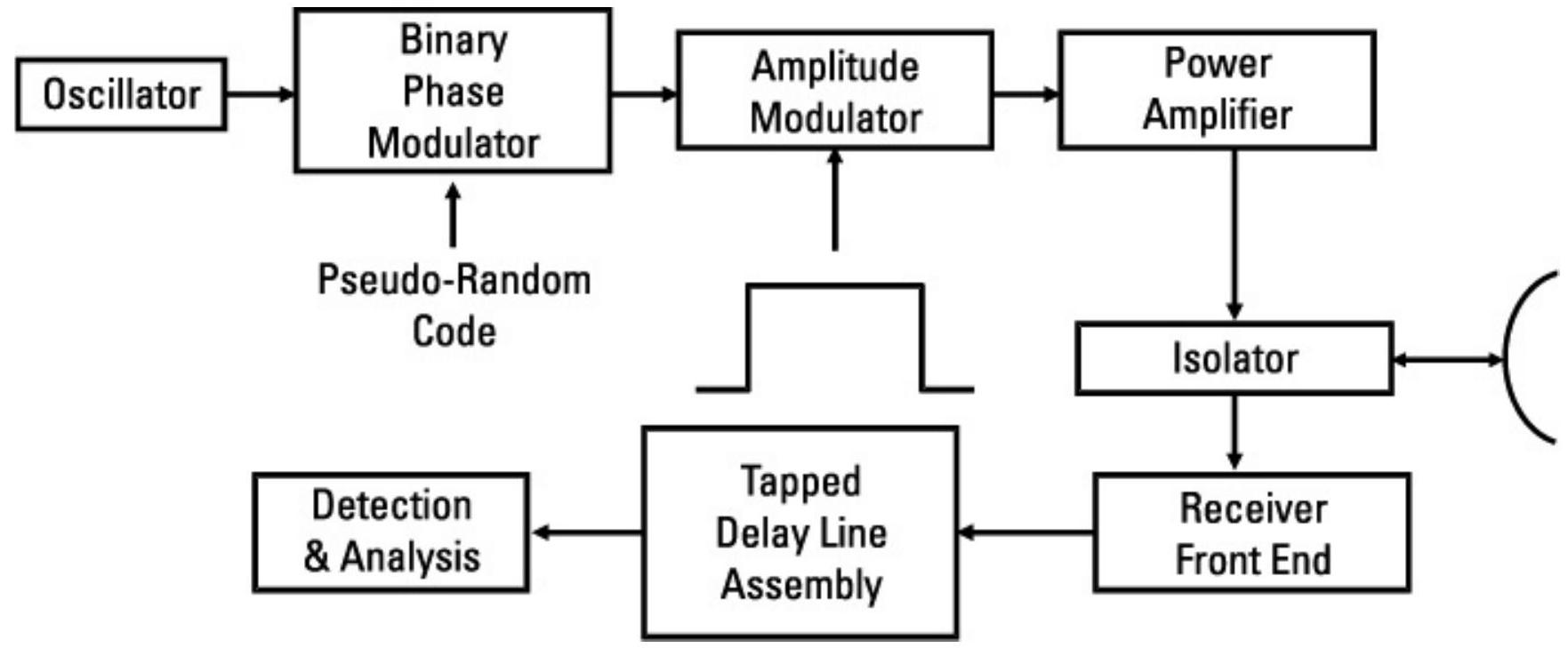
图4.17 每个脉冲被调制上二进制移频码;接收机中的抽头延迟线缩短有效脉宽,从而提高距离分辨率。
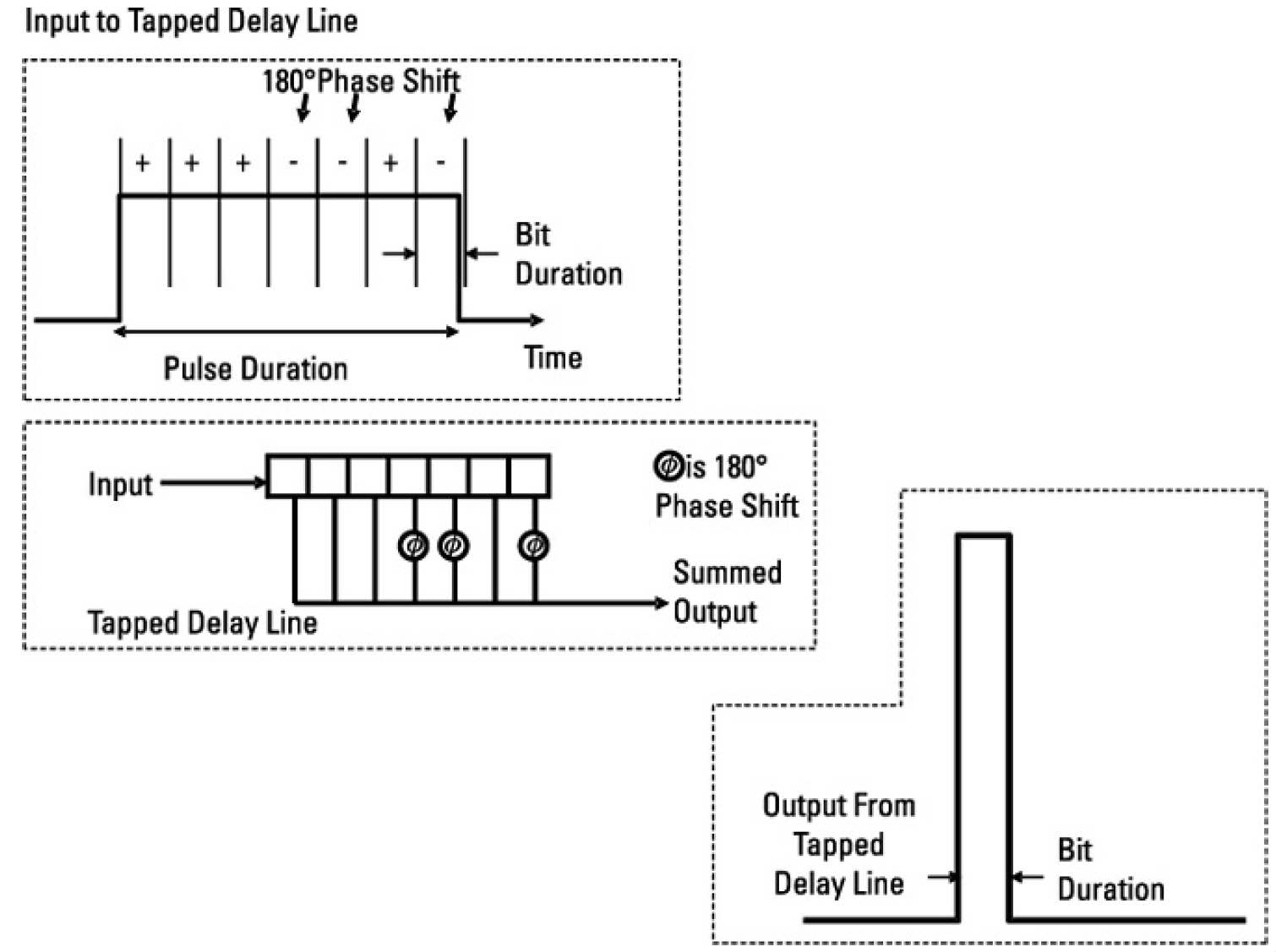
图4.18 当编码脉冲的所有比特与抽头对齐时,延迟线输出产生大幅度信号。
例如,如果每个脉冲包含31比特的编码,则距离分辨率将提升31倍。
现在考虑图4.19。黑色脉冲是带有正确二进制码并与抽头延迟线匹配的雷达信号,它在图右被压缩。灰色脉冲是不带编码的干扰脉冲,如图右所示,其能量未能集中到单比特输出中。与LFMOP相同,数字编码压缩降低了原本可能实现的J/S。J/S降低因子与压缩因子相同。在31比特码的例子中,这会导致有效J/S降低\(15\,\mathrm{dB}\)。
如果干扰机在其干扰信号上施加合适的二进制码(通过使用DRFM),就能对抗雷达的这一EP特性。
4.2.11 距离门拉脱(RGPO)¶
回顾第3章,距离门拉脱(RGPO)欺骗干扰通过生成一个不断延迟的虚假回波脉冲(每个后续脉冲延迟增加),使雷达相信目标正在远离雷达,从而导致雷达失去距离跟踪。RGPO通过用更强的干扰脉冲能量填充雷达的“迟到门”来实现这一点。用于对抗RGPO的EP技术是前沿跟踪。如图4.20所示,雷达通过回波前沿部分的能量来跟踪目标距离。假设RGPO干扰机存在一定的处理延迟,那么干扰脉冲的前沿必然比真实回波脉冲的前沿更晚。
Schleher [1] 给出了一个约50 ns的最大干扰处理延迟值,如果超过此值,RGPO干扰机将无法捕获雷达的距离跟踪。假如干扰机延迟更大,雷达处理将不会识别干扰脉冲,从而继续依据真实回波脉冲来跟踪目标距离。
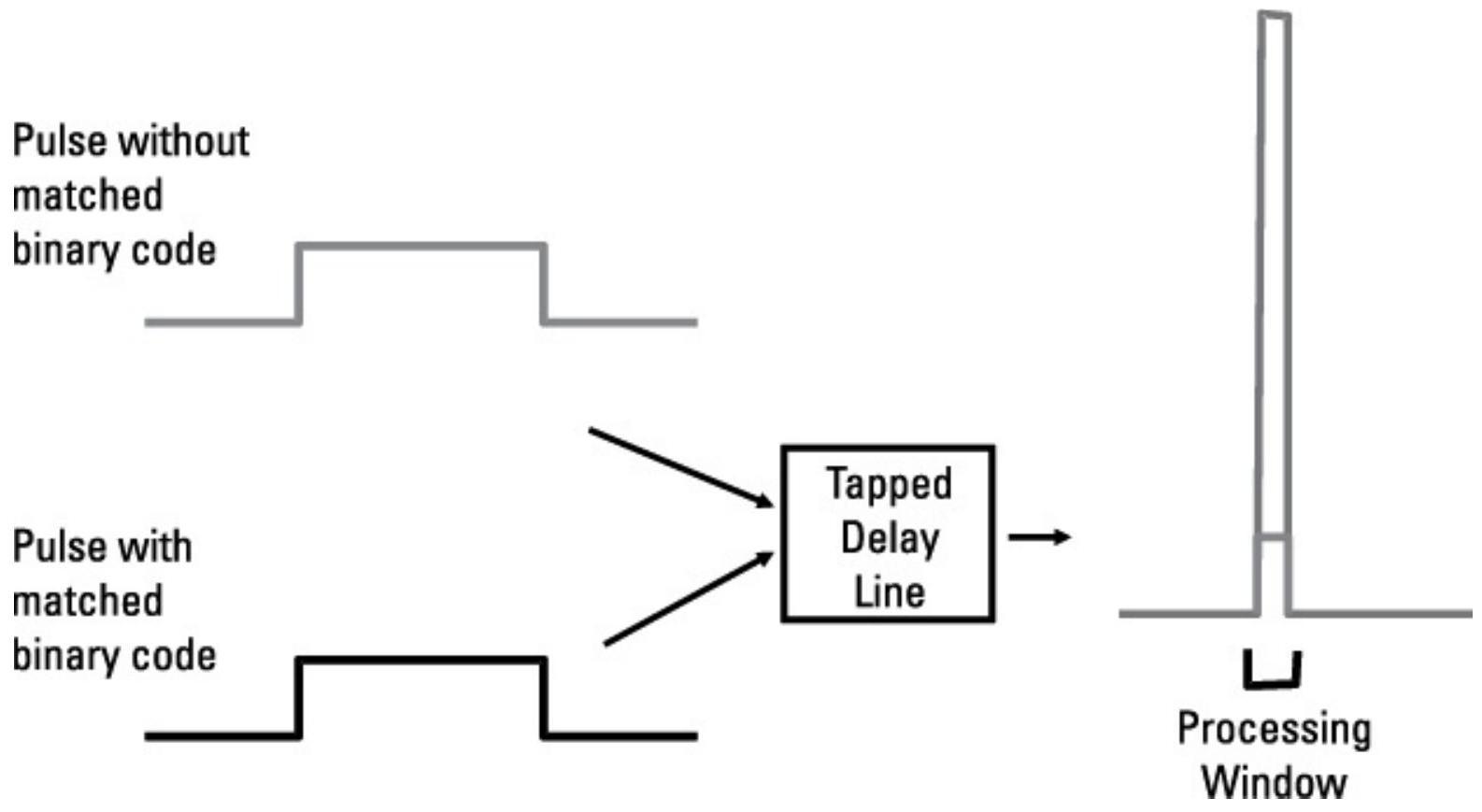
图4.19 除非干扰信号带有正确的二进制编码,否则有效的J/S会因压缩因子而降低。
克服前沿跟踪的干扰技术是距离门拉入(RGPI),也称为向内距离门拉脱。如图4.21所示,干扰机生成一个虚假脉冲,该脉冲逐渐提前出现。虚假脉冲不断提前,穿过真实回波脉冲,从而捕获雷达的距离跟踪(即便雷达采用前沿跟踪),并使雷达误以为目标正在靠近。这会导致雷达失去距离跟踪。为了执行RGPI,干扰机必须具备PRI跟踪能力,能够预测下一次脉冲的时刻。对抗RGPI的雷达EP是采用脉冲抖动。由于抖动脉冲的脉间间隔是随机函数,干扰机无法预测下一次脉冲的时刻,因此无法顺利生成提前的虚假脉冲。

图4.20 前沿跟踪器会忽略RGPO干扰信号。干扰机的延迟使得干扰脉冲的前沿落在迟到门之外,从而无法捕获雷达的跟踪电路。

图4.21 距离门拉入干扰通过生成比真实回波脉冲提前的虚假脉冲,捕获前沿跟踪电路。
4.2.12 AGC干扰¶
在第3章中,我们讨论了自动增益控制(AGC)干扰,即在目标雷达扫描速率附近生成强窄脉冲干扰。窄脉冲干扰捕获雷达的AGC,使雷达将增益调低到无法识别来自天线扫描的回波幅度变化的程度(见图4.22)。因此,雷达无法完成角度跟踪。由于干扰脉冲占空比较低,该方法能以较小的干扰机能量实现有效干扰。针对AGC干扰的EP是Dicke修正,如图4.23所示。
Dicke修正包括一个带限器的宽带通道,后接一个带宽与雷达脉冲匹配的窄带通道。由于窄脉冲干扰具有宽带特性,它会在宽带通道中被削波。雷达所需的AGC功能在窄带通道中完成,因此不会被此前被限幅的窄脉冲捕获。
4.2.13 噪声干扰质量¶
噪声干扰的有效性高度依赖噪声的质量。理想的干扰噪声应为白高斯噪声。因此,如果干扰机功放饱和导致削波失真,会使目标雷达接收机中的J/S降低数个分贝。
生成高质量干扰噪声的一种非常有效的方法如图4.24所示。一个CW信号被高斯信号调频,频率带宽远大于雷达接收机带宽。每当干扰信号扫过雷达接收机带宽时,就会产生一个脉冲。这一系列随机时序的脉冲在接收机中形成高质量的白高斯噪声。
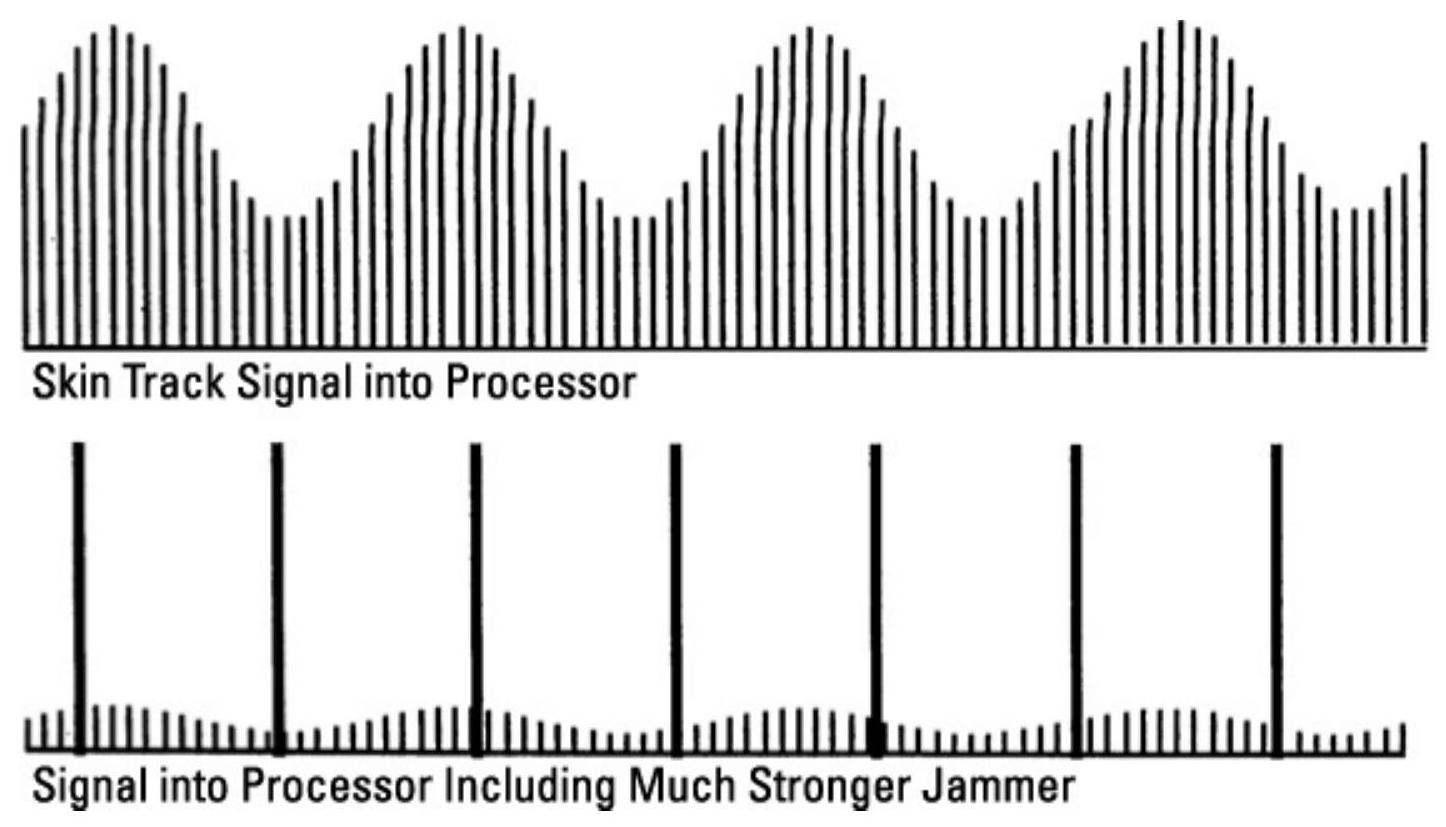
图4.22 通过在雷达天线扫描速率附近发射强窄脉冲,AGC干扰机捕获雷达的AGC,使回波幅度变化无法使用。
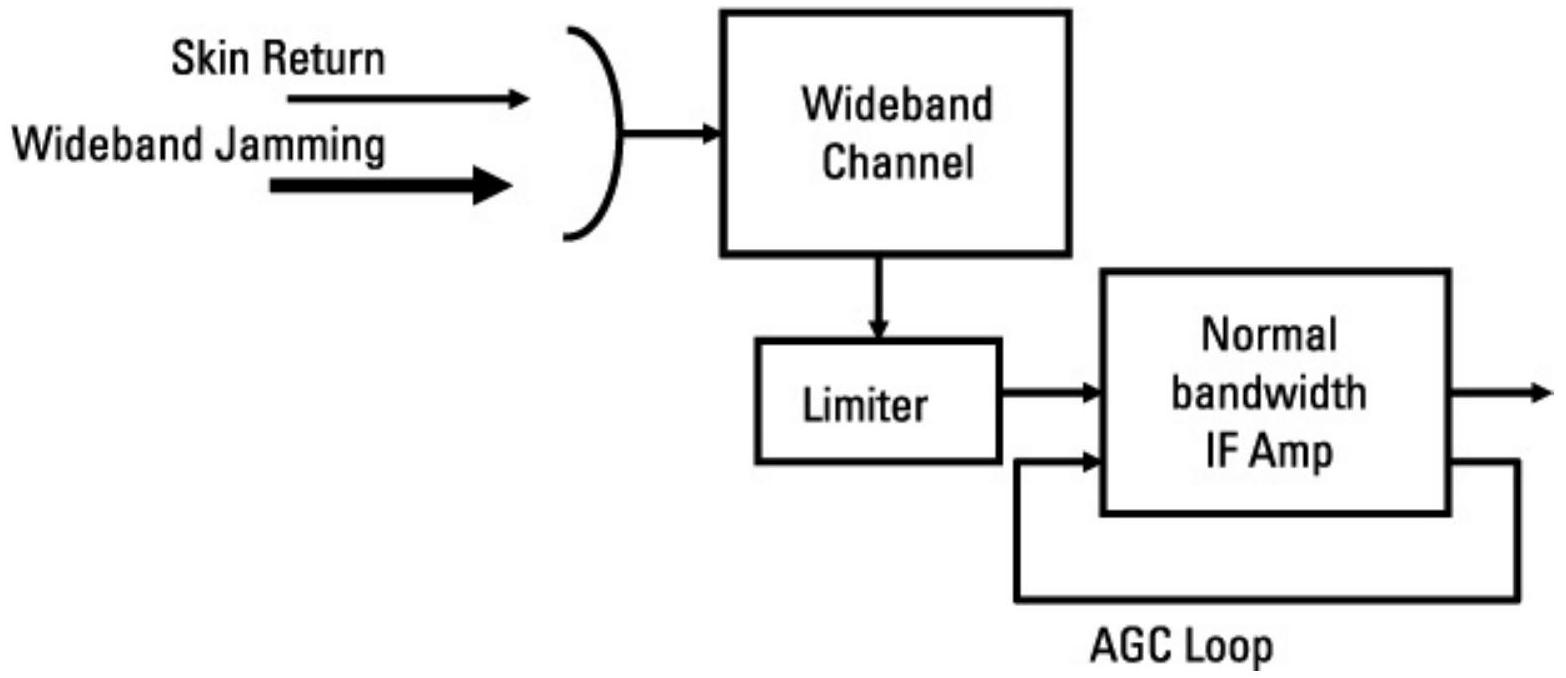
图4.23 雷达中的Dicke修正通过在输入窄带通道前限制宽带通道输出,保护AGC功能免受强宽带干扰。
由于脉冲本质上是宽带信号,因此Dicke修正中的宽带限幅会降低窄带通道中的J/S。这是针对该类噪声干扰的有效EP措施。
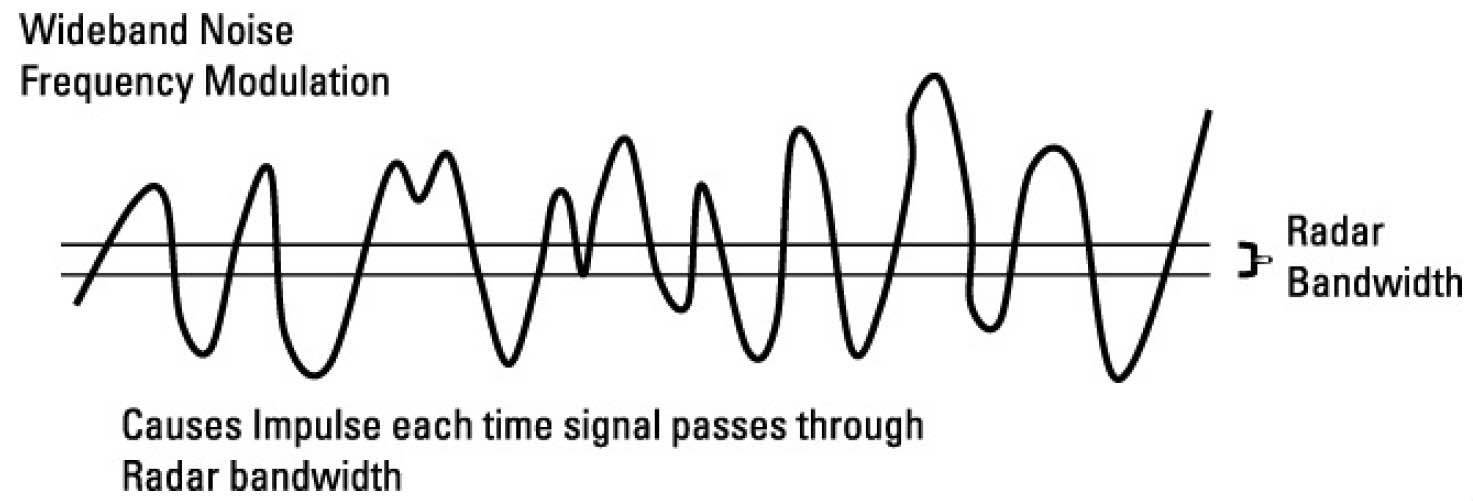
图4.24 宽带调频噪声调制在信号扫过雷达带宽时产生脉冲,从而在接收机中形成理想噪声干扰。Dicke修正会降低这种干扰的效果。
4.2.14 脉冲多普勒雷达的电子防护特性¶
脉冲多普勒(PD)雷达固有的电子防护(EP)特性包括:
- 期望回波在窄频带范围内,因此能够区分非相干干扰;
- 能够识别干扰机的杂散输出;
- 能够检测到箔条的频率展宽;
- 能够分辨分离目标;
- 能够关联距离变化率与多普勒频移。
4.2.15 脉冲多普勒雷达结构¶
脉冲多普勒(PD)雷达是相干的,因为每个脉冲都是相同RF信号的采样,如图4.25所示。因此,可以同时测量回波信号的到达时间和多普勒频移。到达时间用于确定目标距离,多普勒频移则由目标相对于雷达的径向速度引起。后文将讨论PD雷达必须克服的一些重要模糊性问题。
PD雷达的处理器生成一个距离-速度矩阵,如图4.26所示。距离单元显示接收脉冲相对于发射脉冲的到达时间,每个单元具有一个距离分辨深度。时间分辨率(即距离单元深度)等于脉宽的一半。这赋予PD雷达的距离分辨率为:
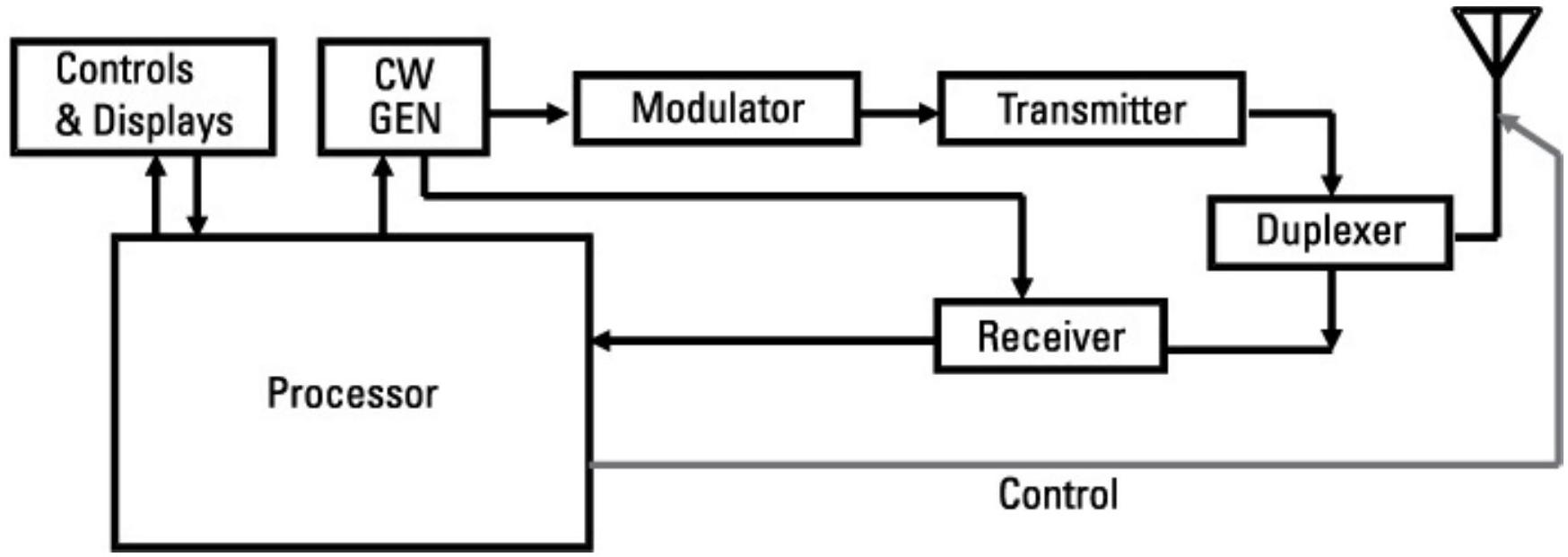
图4.25 脉冲多普勒雷达是相干的,并使用复杂处理来应对模糊性。
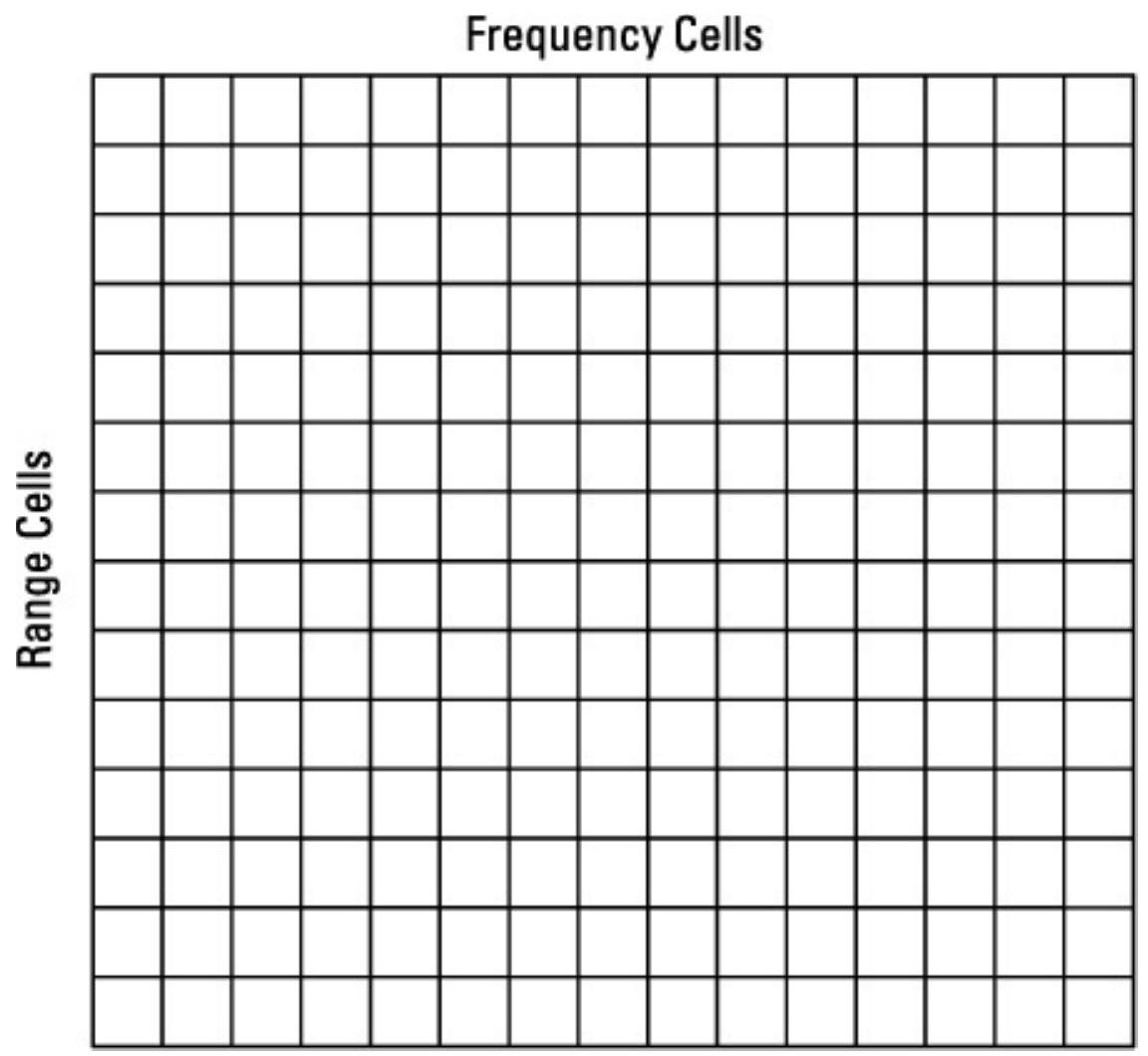
图4.26 脉冲多普勒雷达处理生成距离-回波频率矩阵。
这些距离单元在脉间保持连续。速度单元由一组通道化滤波器或快速傅里叶变换处理产生。速度(即多普勒频率)通道宽度等于滤波器带宽。滤波器带宽的倒数是相干处理间隔(CPI),即雷达处理信号的时间。需要注意的是,在搜索雷达中,CPI可以长达雷达天线照射目标的时间。因此频率通道可以非常窄。例如,如果雷达波束照射目标20 ms,滤波器带宽可以窄至50 Hz。
雷达积分的脉冲数量决定了其处理增益(相对于噪声水平)。处理增益为:
4.2.16 分离目标¶
考虑第3章讨论的RGPO欺骗干扰。图4.27展示了真实回波脉冲和干扰机生成的虚假脉冲。在传统雷达中,处理器具有早门和迟门(而非PD雷达的连续距离单元)。由于干扰脉冲具有正的J/S,它捕获了雷达的距离跟踪。干扰机通过逐步延迟每个后续干扰脉冲,使迟门能量积累,雷达误以为目标正在远离。然而,PD雷达可以同时看到两个回波脉冲(即分离目标)。每个脉冲都被置入时间-速度矩阵,如图4.28所示。

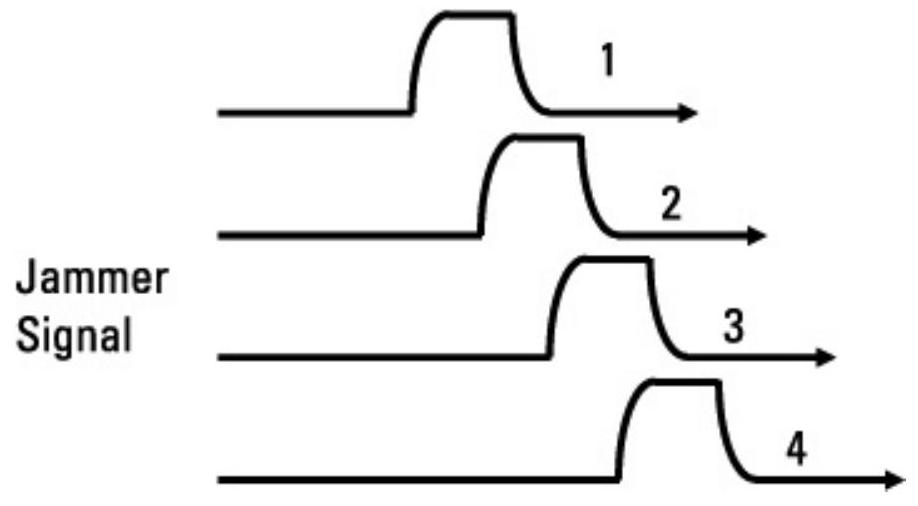
图4.27 距离门拉脱通过逐次延迟回波脉冲,使雷达迟门能量积累。
真实目标回波信号会随着距离值增加而逐步进入不同的距离单元。这一变化表明了径向速度。真实目标回波会落入对应于该径向速度所致多普勒频移的速度单元。然而,干扰脉冲由于被延迟,表观距离增加。干扰脉冲所处的速度单元由干扰机的实际径向速度决定。因此,干扰脉冲落入的速度单元与其在距离单元中表现出的距离变化率不一致。这使PD雷达能够选择那些距离变化率与观察到的多普勒频移相符的脉冲,从而继续跟踪目标,击败RGPO干扰。
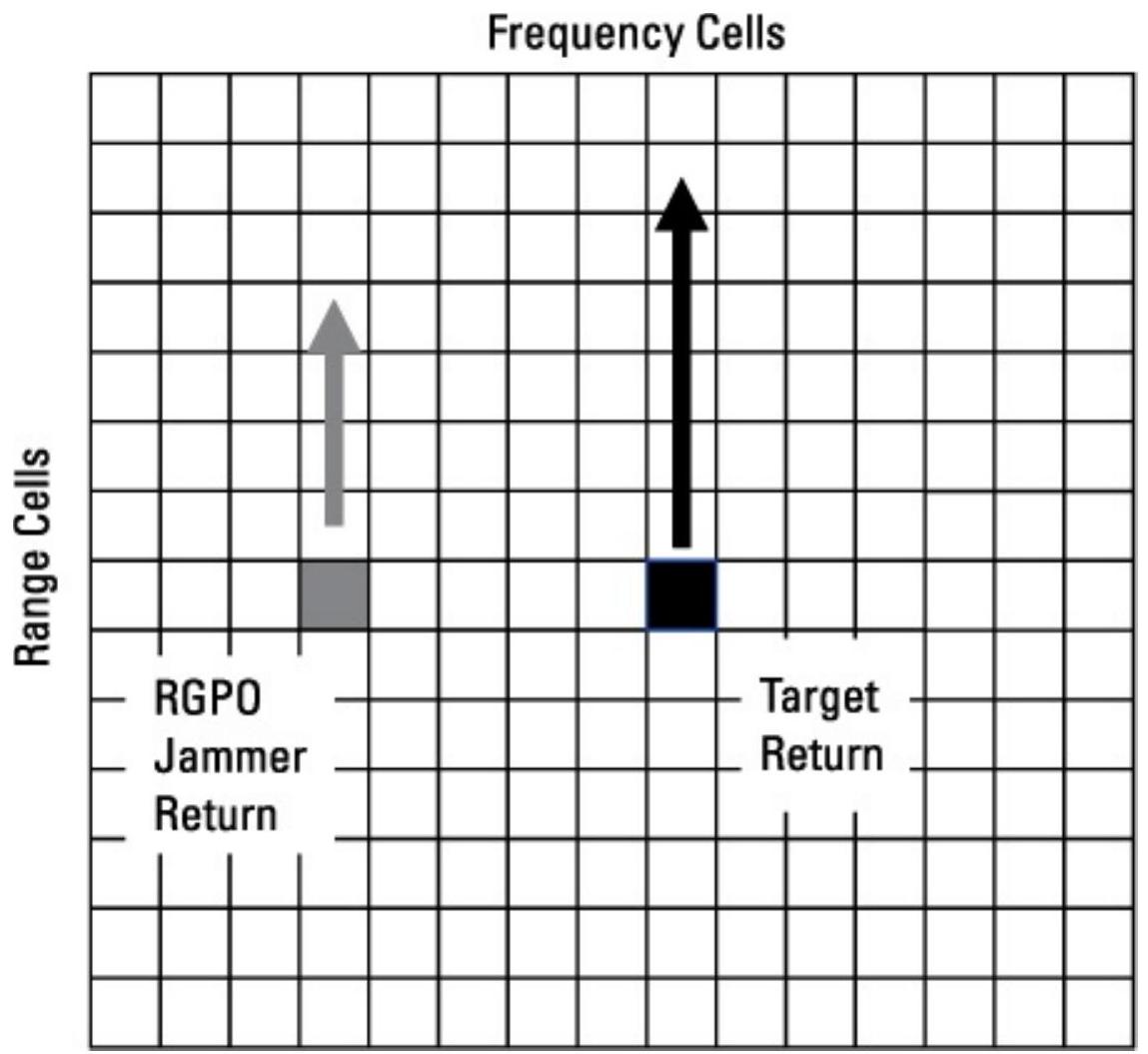
图4.28 RGPO干扰机生成的脉冲,其多普勒频移与其距离变化率不一致。
以上讨论是简化的。需要理解的是,在动态交战中,目标距离很可能在变化,但其距离单元随时间的历史记录会表明一个径向速度,并与包含回波信号的多普勒滤波器所指示的速度值一致。而干扰信号的计算值与指示值会不同。
需要注意的是,这也使PD雷达能够识别RGPI干扰。为了克服PD雷达的这一优势,干扰机还必须施加速度门拉脱(VGPO),如第3章所述。其频率偏移必须与距离门拉脱速率协调,才能欺骗PD雷达。
4.2.17 相干干扰¶
如图4.29所示,目标的相干回波会落在单一多普勒单元中。而宽带干扰信号(如压制干扰或非相干窄带噪声)会占据多个频率单元,因此雷达会优先选择相干的目标回波。这意味着,如果干扰机要欺骗PD雷达,就必须生成相干干扰信号。
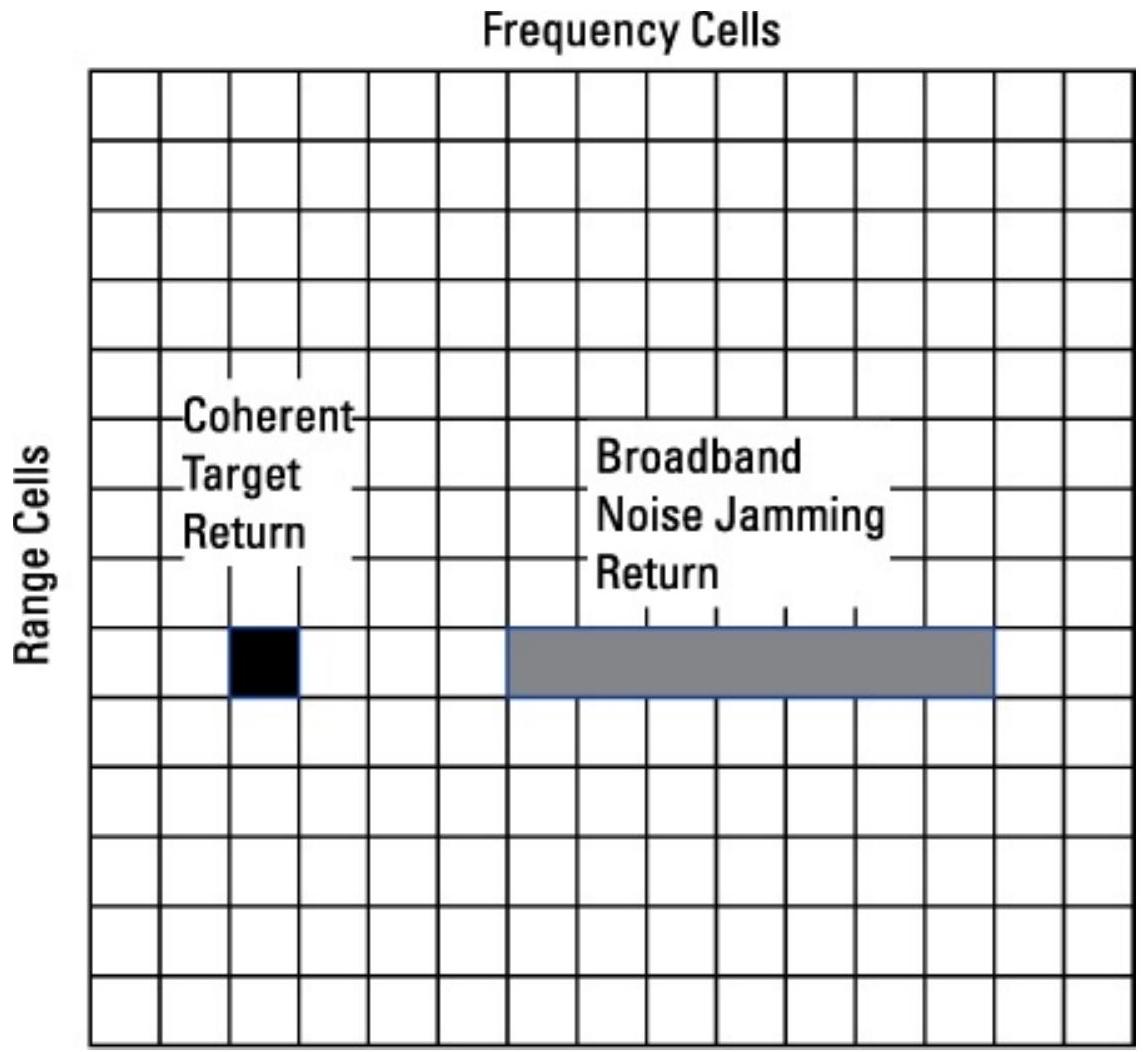
图4.29 相干PD雷达在单一频率单元中观察到目标回波,而宽带噪声干扰会占据多个频率单元。
需要注意的是,箔条云引起的闪烁也会展宽雷达信号。PD雷达能够检测这种频率展宽,从而区分箔条回波。
4.2.18 PD雷达的模糊性¶
雷达的最大无模糊距离是指在下一次脉冲发射前,已发射脉冲以光速完成往返的最大距离(见图4.30)。
其中 \(R_{U}\) 是无模糊距离(米),PRI为脉冲重复间隔(秒),c为光速(\(3 \times 10^{8} \, \mathrm{m/s}\))。
例如,若PRI为\(100 \,\mu s\),则无模糊距离为15 km。脉冲重复频率(PRF)越高,PRI越短,因此无模糊距离越短。如果PRF很高,将会出现许多距离模糊。
回波信号的多普勒频移落入PD雷达处理器中的某个多普勒滤波器。
最大多普勒频移为:
其中 \(\Delta F\) 是多普勒频移(kHz),\(v_{R}\) 是距离变化率(m/s),\(F\)是雷达工作频率(kHz)。
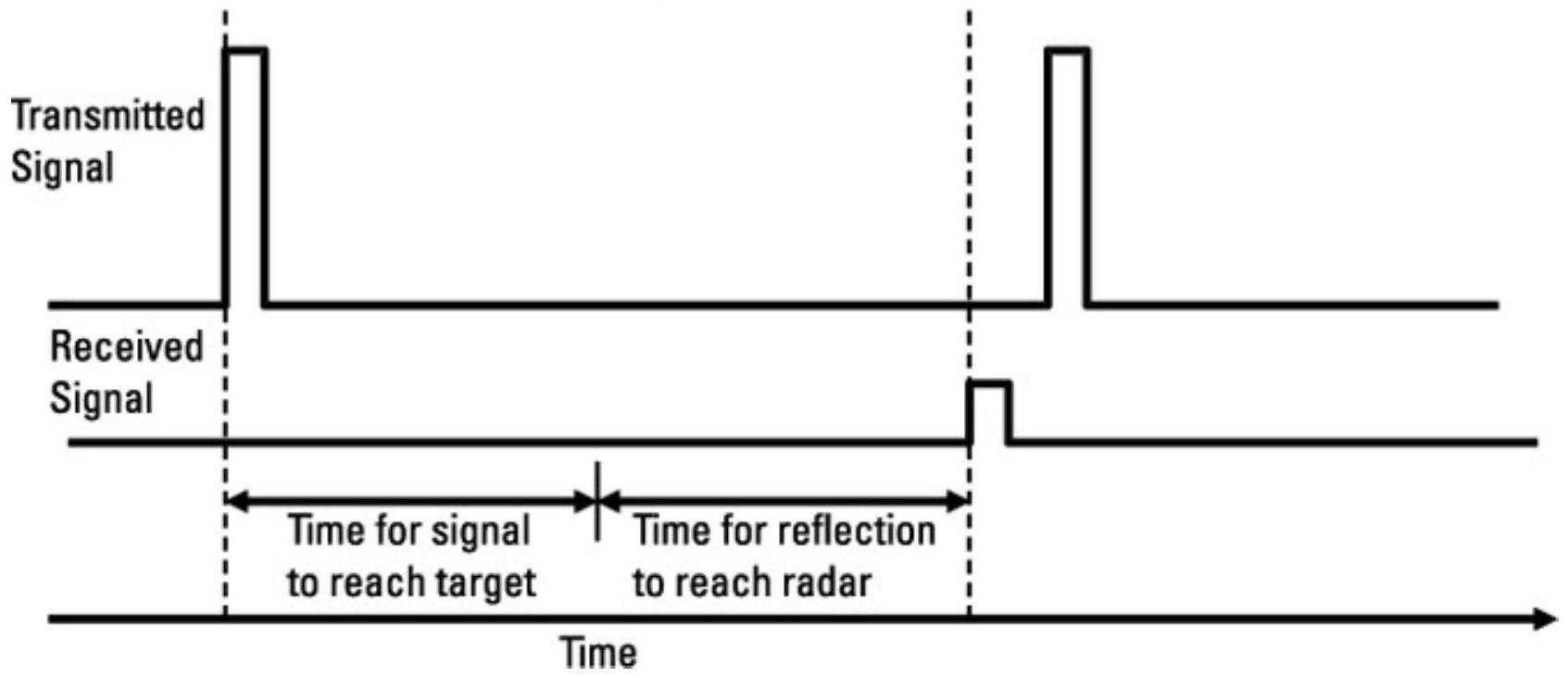
图4.30 最大无模糊距离是指雷达脉冲在下一次发射前能以光速完成往返的最大距离。
例如,如果一部10 GHz雷达设计用于最大500 m/s(略高于马赫1.5)的交战:
脉冲信号的频谱在频率上以PRF为间隔形成谱线,如图4.31所示。如果PRF较低,例如1000 pps,则谱线间隔为1 kHz;如果PRF较高,例如300 kpps,则谱线间隔为300 kHz。每条谱线还会发生多普勒频移,如果其小于设计交战的最大多普勒频移,就会在处理矩阵中造成频率模糊。PRF越低,频率模糊越大。PRF为1000 pps时,会有许多小于33.3 kHz的模糊响应,而PRF为300 kpps时,在处理矩阵的频率范围内完全无模糊。
如图4.32所示,当PRI小于处理矩阵中目标最大距离的往返时间时,距离存在模糊性;当PRF小于矩阵中的最大多普勒频移(即最高多普勒滤波器的频率)时,频率存在模糊性。
4.2.19 低、中、高PRF的脉冲多普勒雷达¶
脉冲多普勒雷达可根据PRF分为三类,如图4.33所示。
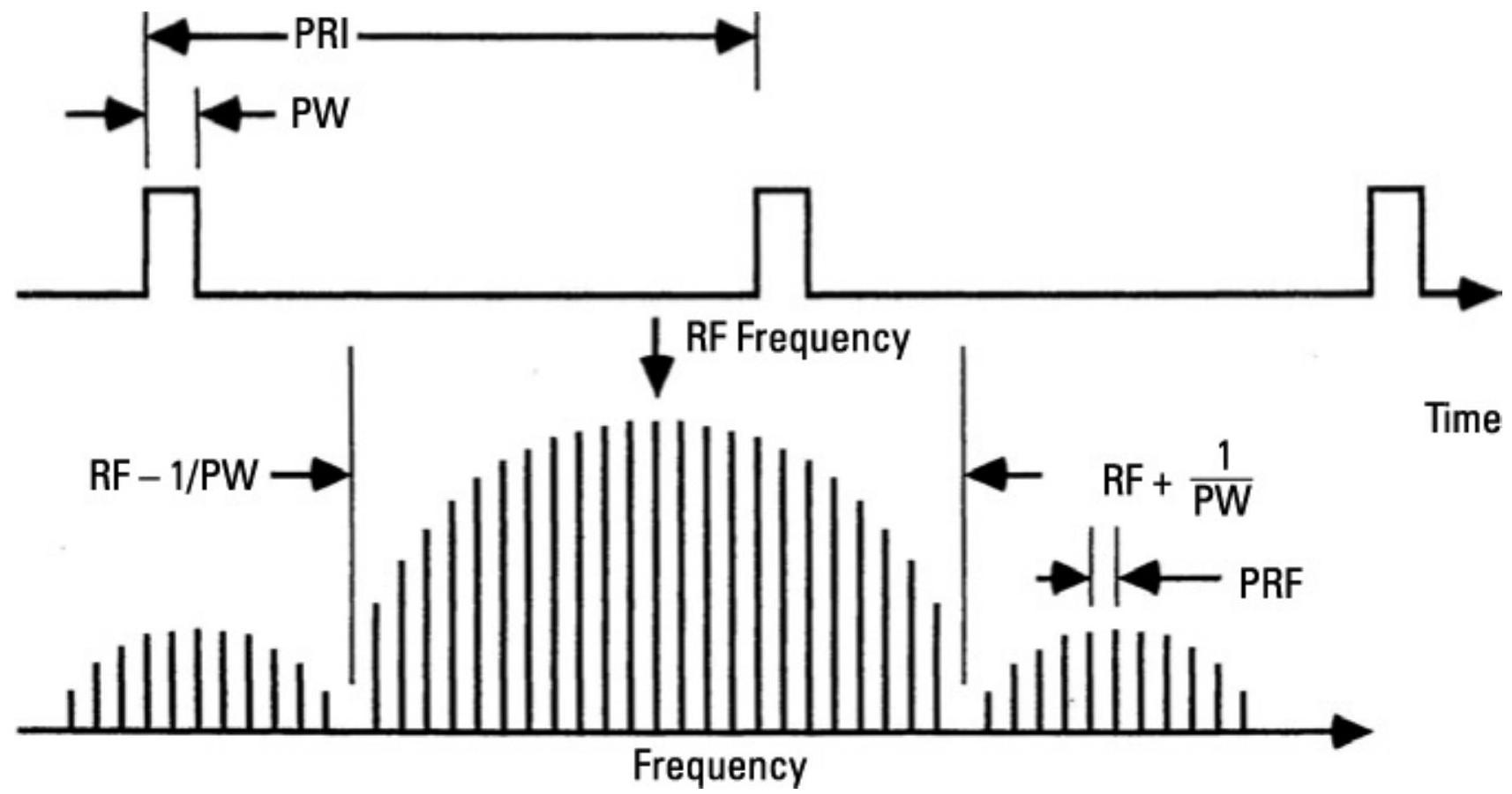
图4.31 在频域中,脉冲信号的谱线间隔等于PRF。
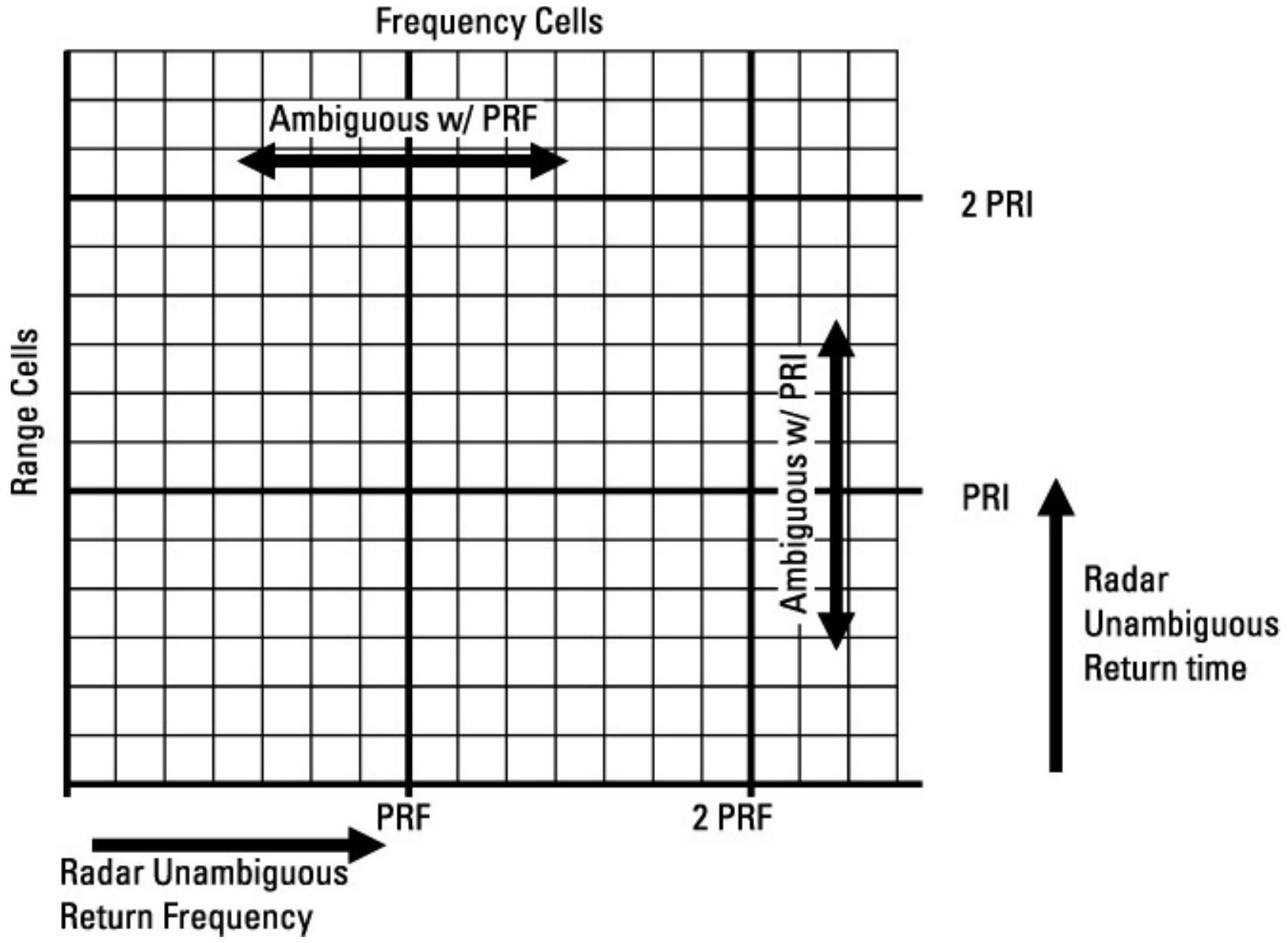
图4.32 脉冲多普勒雷达的距离模糊取决于PRI,频率模糊取决于PRF。
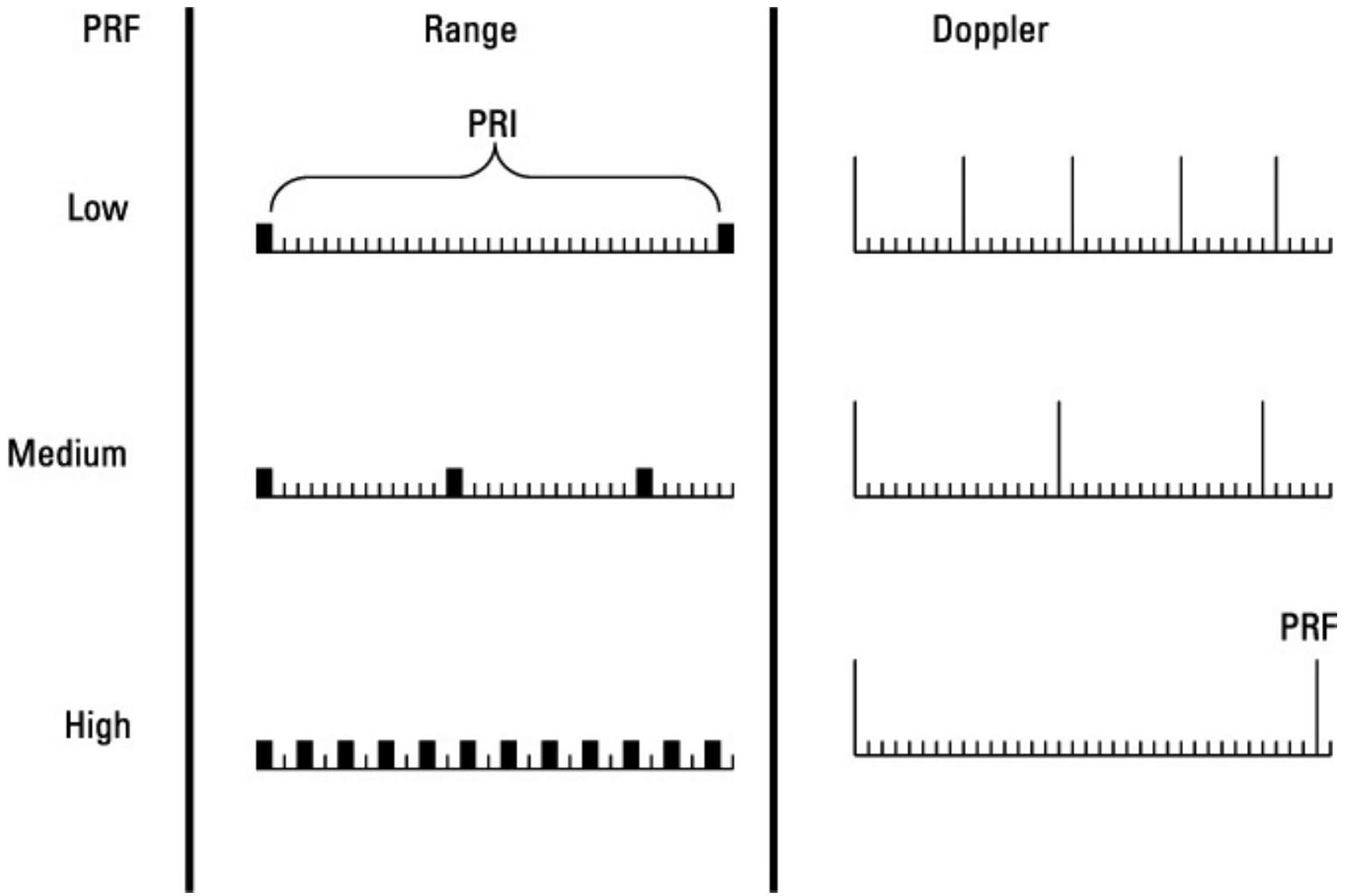
图4.33 低、中、高PRF多普勒雷达的距离与频率单元。
低PRF雷达因其较大的PRI,在较大目标距离下无模糊,因此非常适合目标探测。然而,其低PRF导致多普勒频率判定高度模糊。这意味着目标径向速度的判定存在不确定性,限制了雷达在距离变化率/速度关联上的能力,使其容易受到RGPO和RGPI干扰。
高PRF雷达在相当高的距离变化率下无多普勒频率模糊,因此非常适合用于高速迎头交战。大的多普勒频率是理想的,因为目标回波远离地面回波和内部噪声干扰。然而,高PRF带来较低PRI,使得高PRF脉冲多普勒雷达在距离上高度模糊。这类雷达可以仅用于速度模式,或者通过在信号上加调频(见图4.34)来确定距离。需要注意的是,尾追交战的距离变化率较低,多普勒频移远低于迎头交战,因此高PRF雷达在这种情况下优势较小。
中PRF雷达在距离和速度上均存在模糊性。它是为了改善尾追交战而发展出来的。中PRF雷达使用多个PRF,每个PRF在距离/速度矩阵中会产生模糊区。在处理时,可以判定目标所在的距离和速度在某些PRF下并不模糊。

图4.34 若在雷达信号中加入如图所示的调频,则发射与接收信号的差值包括线性部分的多普勒频移以及斜坡部分的传播延迟(与距离成正比)。
4.2.20 干扰的探测¶
由于脉冲多普勒雷达能够探测干扰,因此它会允许任何具备“被动干扰制导”(home-on-jam)能力的导弹系统切换到home-on-jam模式,如第4.2.23节所述。
4.2.21 频率分集¶
雷达可以具备多种工作频率,如图4.35所示。需要注意的是,雷达需要高效天线和稳定功放,因此可用频率范围通常小于\(10\%\)。若抛物面天线的工作频率范围小于\(10\%\),其效率可达\(55\%\);而更宽频率范围的天线效率则大幅下降。例如,一副\(2-18\ \mathrm{GHz}\)的EW天线效率大约为\(30\%\)。
最简单的频率分集是可选择的一组频率,雷达在某一频率下运行较长时间。只要干扰机接收机能测得工作频率,就能调至该频率并优化其干扰带宽。这适用于窄带噪声的压制干扰,也适用于欺骗干扰。
更具挑战的频率分集方式是每次天线扫描使用不同频率。例如,若雷达天线采用螺旋扫描(每个仰角进行一次圆形方位扫描),则雷达可能在每次圆扫后更换频率。这使雷达在相干处理时间内保持单一频率。当干扰机具备数字射频存储器(DRFM)时,它能够在首次接收到的脉冲中测量频率(及其他参数),并在雷达波束覆盖目标期间准确复制所有后续脉冲。(关于DRFM将在第8章详细讨论。)
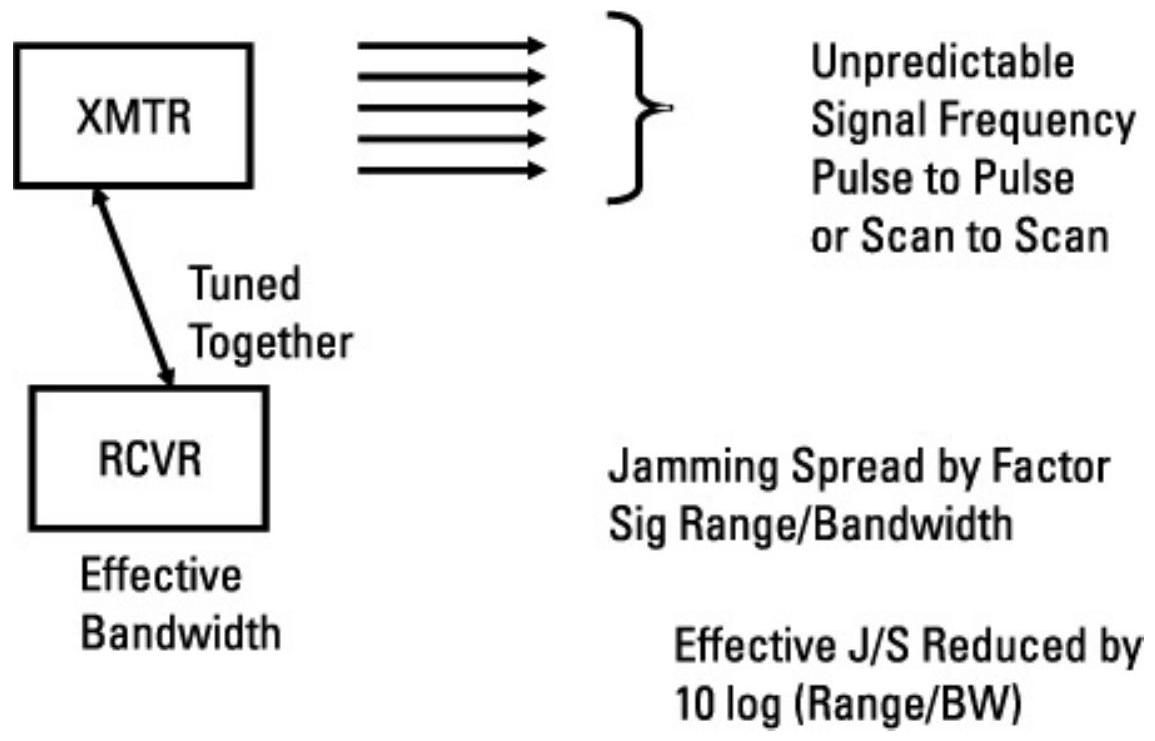
图4.35 频率分集要求干扰机覆盖多个频率或更大的频率范围。
最具挑战的频率分集方式是脉间跳频。在这种情况下,每个脉冲以伪随机频率发射。由于干扰机无法预测未来脉冲的频率,因此不可能最优地干扰雷达。同时,这类雷达通常会避开检测到干扰的频率,因此干扰其中少数频率难以提高干扰效果。如果频率数量有限,可以为每个频率配置干扰机,但更常见的做法是干扰整个跳频范围。例如,若雷达在6 GHz附近的\(10\%\)频率范围内工作,接收机带宽为3 MHz:
- 干扰机必须覆盖600 MHz的频率范围;
- 雷达接收机在其带宽内仅能看到3 MHz的干扰信号;
- 因此干扰有效性仅为\(0.05\%\);
- 与匹配干扰相比,有效J/S降低23 dB。
4.2.22 PRF抖动¶
若雷达具有伪随机选择的脉冲重复间隔(见图4.36),干扰机就无法预测雷达脉冲的到达时刻。因此无法实施RGPI干扰。若采用覆盖脉冲来剥夺雷达的距离信息,则这些覆盖脉冲必须延长,以覆盖全部可能的脉冲位置范围。这要求干扰机在覆盖脉冲流中使用更长的占空比,从而降低干扰效率。
自卫干扰的干扰噪声比随距离平方变化,因为雷达信号在传播到目标和返回过程中功率按距离平方衰减,而干扰信号仅传播一次(从目标位置到雷达)。如图4.37所示,随着搭载干扰机的目标接近雷达,雷达接收机中的干扰信号随距离平方增加,而回波信号随距离四次方增加。此时,当J/S降低到足够程度,使雷达能够重新捕获目标的距离被称为突破距离(burn-through range)。需要注意,图中将突破距离定义为干扰信号与回波信号相等时,但实际上所需的最小J/S取决于应用的干扰技术和雷达设计。
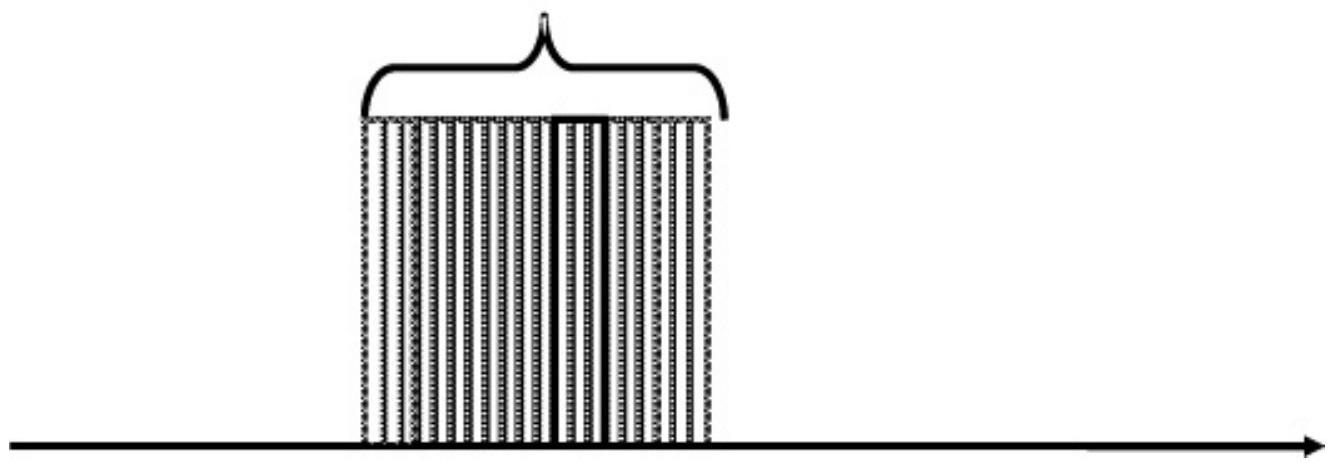
图4.36 随机PRI要求干扰机覆盖脉冲时序的全范围,从而防止RGPO并延长覆盖脉冲时间。
如第3章所述,远程压制干扰的情况有所不同。区别在于,远程干扰机假定不随目标靠近雷达而移动。此时,当目标距离雷达的距离缩短到远程干扰机不再能提供保护的范围时,即为突破距离。
雷达方程在[1]中给出,定义了雷达能获取目标的距离。该方程在多种形式下使用,但都包含一个时间项,代表雷达照射目标的时间。这是因为雷达探测依赖回波的接收能量。信噪能量比必须达到一定水平(通常取13 dB)才能实现探测。
图4.38展示了回波信号与干扰信号进入受干扰雷达的情况。该图强调雷达依赖能量探测,而干扰机提供干扰功率。雷达可以通过增加有效辐射功率或提高脉冲占空比来延长探测距离。许多雷达采用辐射功率控制,仅发射足够的功率以获得良好的信噪比。一旦检测到干扰,雷达就可以将输出功率提高到最大。由于J/S取决于干扰机与雷达ERP的比值,因此任何雷达功率的增加都会降低J/S,从而扩大雷达能够克服干扰的范围。
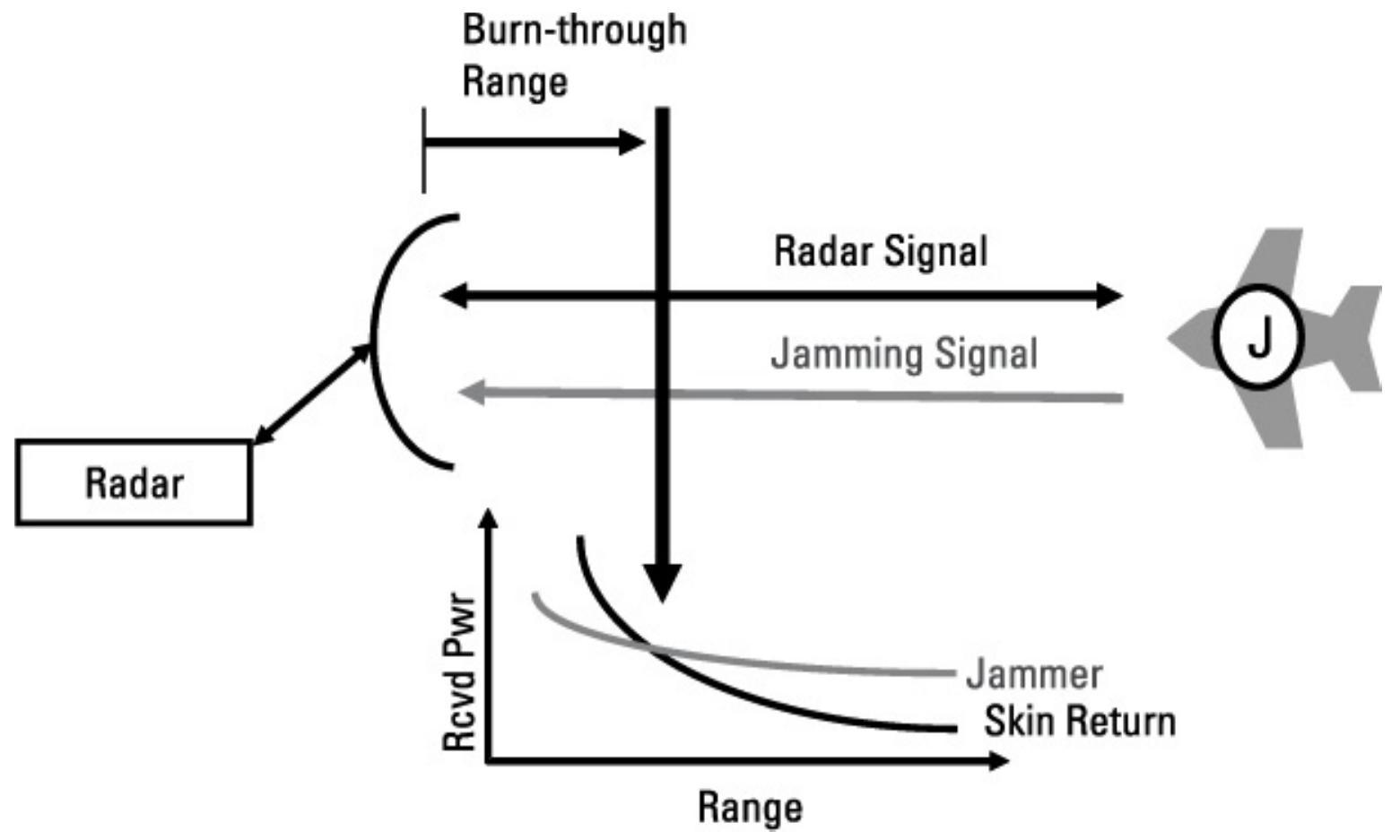
图4.37 雷达突破距离是指在干扰存在时,雷达仍能重新捕获目标的距离。
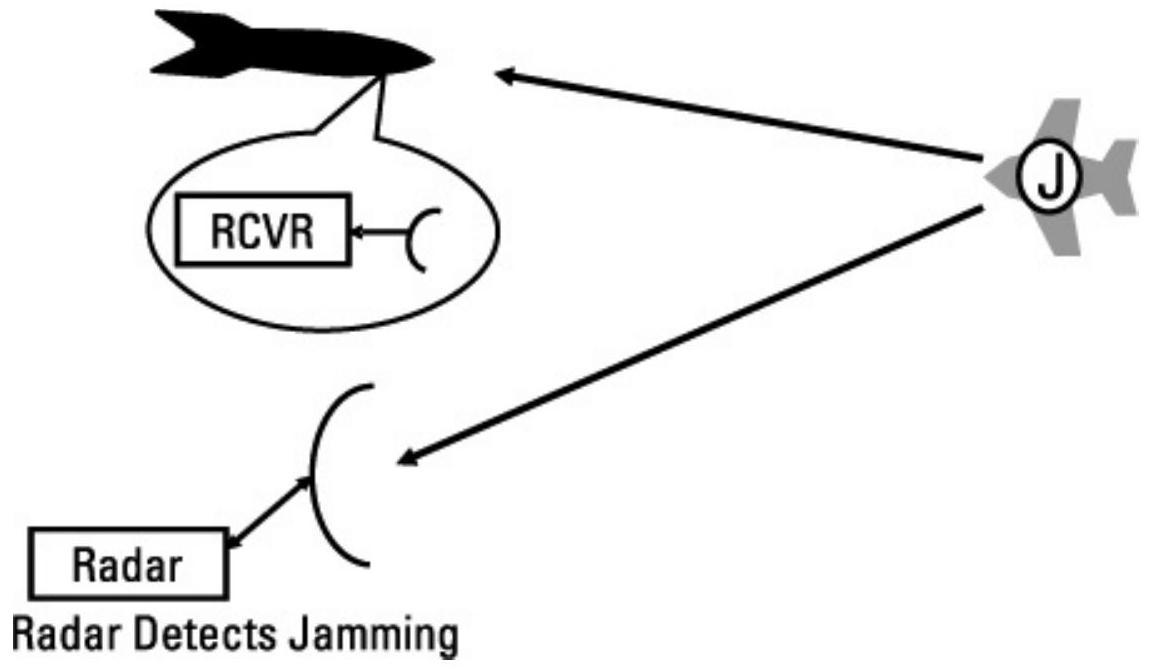
图4.38 突破模式通过增加发射功率或信号占空比来延长突破距离。
由于雷达的探测距离与目标照射时间成正比,因此任何占空比的增加都会提高探测距离,从而使雷达能在更远距离获取或重新获取目标。
4.2.23 被动干扰制导(Home on Jam)¶
许多现代导弹系统具备被动干扰制导模式,也称为干扰跟踪模式。如图4.39所示,这要求导弹能够接收干扰信号并判定其到达方向。如果雷达检测到干扰,它可以进入home-on-jam模式,使导弹朝干扰机方向飞行。这一特性使得使用自卫干扰进行末端防护极为危险。由于此模式也能作用于远程干扰机,因此若导弹射程足够到达远程干扰位置,就会威胁到这一高价值/低数量的资产。需要注意的是,通过弹道抛射导弹,可能在home-on-jam模式下获得更远的射程。
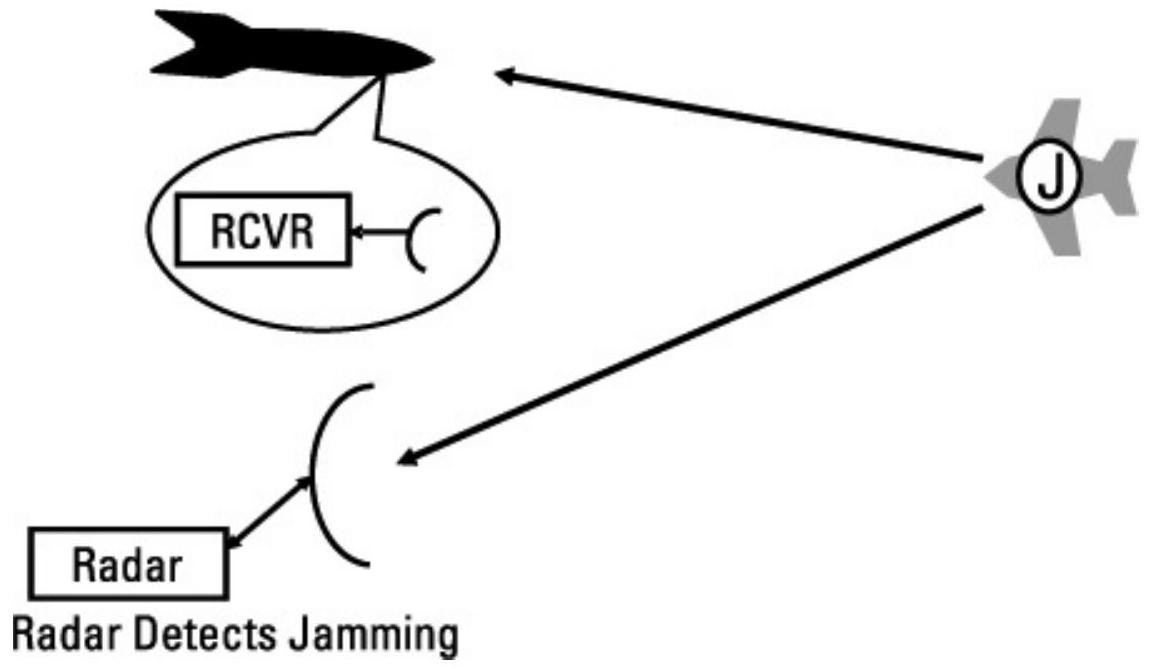
图4.39 被动干扰制导模式要求导弹具备无源制导能力,使其能够追踪干扰源。
4.3 地对空导弹的升级¶
图4.40展示了苏联防空系统升级的谱系图。该图仅聚焦于俄罗斯武器,尽管部分技术已出口至中国,从而引发了与俄罗斯本土发展路径不同的并行演进。在图中所示的各类武器系统中,每一代产品的设计都旨在克服旧式系统在应对电子对抗时暴露出的弱点或在实战测试中发现的不足。
公开文献中对雷达频段的描述通常采用北约雷达频段分类(见表4.2),但有时也采用IEEE标准雷达频段分类(见表4.3)。
该图中最大部分涉及S-300导弹系统,该系统的发展旨在解决早期苏联导弹系统在对抗电子对抗时的缺陷。这一系列防空导弹系统可以追溯到更早的SA-2、SA-3、SA-4和SA-5系统。S-300系列在继承前代系统优势的基础上,显著提升了规避旧系统脆弱性的能力。
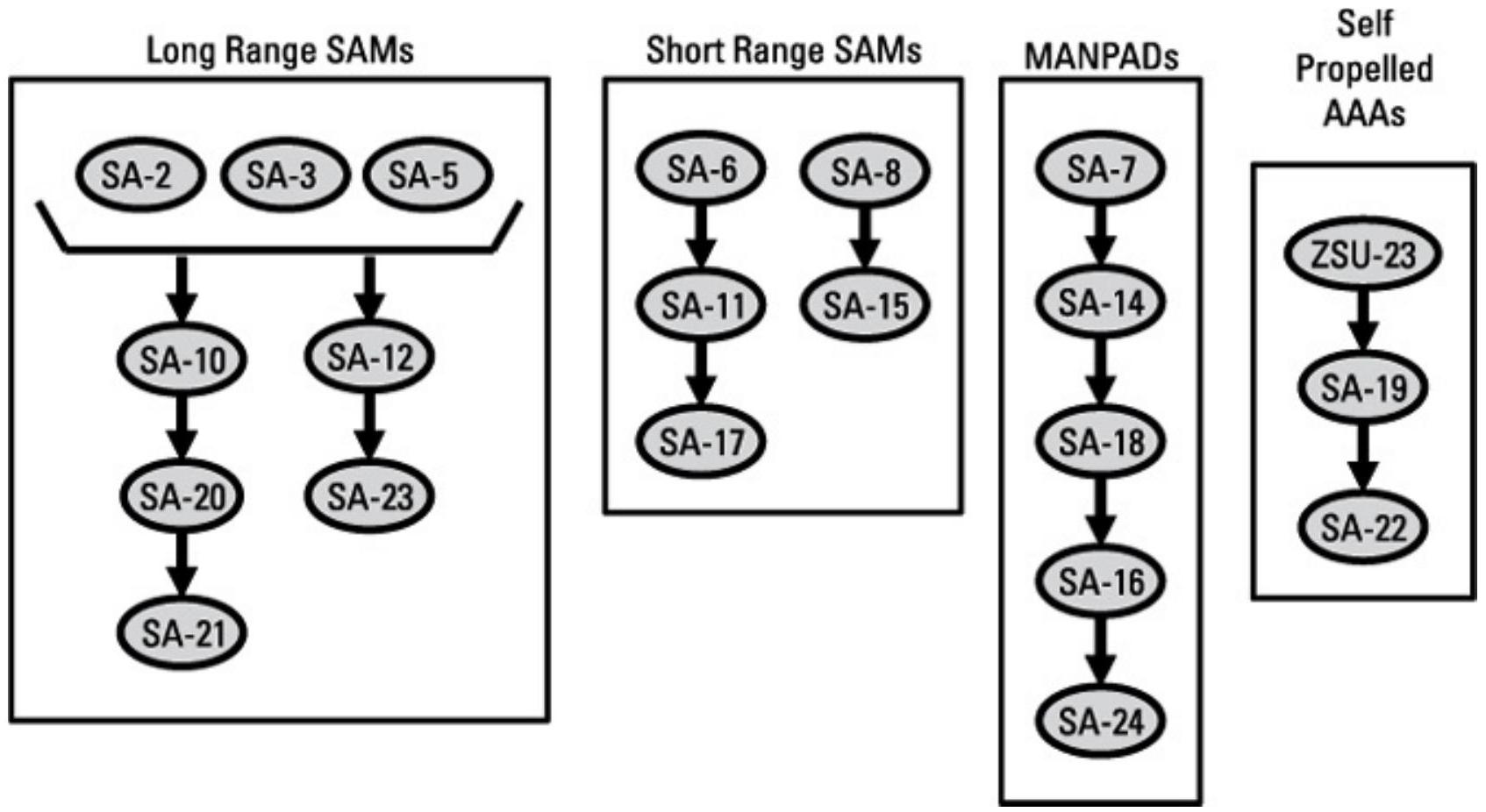
图4.40 威胁武器系统经历了多次升级,且升级过程仍在持续。
表4.2 北约雷达频段分类
| 波段 | 频率范围 |
|---|---|
| A | 0 – 250 MHz |
| B | 250 – 500 MHz |
| C | 500 – \(1,000 \,\mathrm{MHz}\) |
| D | 1 – 2 GHz |
| E | 2 – 3 GHz |
| F | 3 – 4 GHz |
| G | 4 to 6 GHz |
| H | 6 to 8 GHz |
| I | 8 to 10 GHz |
| J | 10 to 20 GHz |
| K | 20 to 40 GHz |
| L | 40 to 60 GHz |
| M | 60 to 100 GHz |
表4.3 IEEE标准雷达频段分类
| 波段 | 频率范围 |
|---|---|
| HF | 3 – 30 MHz |
| VHF | 30 – 300 MHz |
| UHF | 300 – \(1,000 \,\mathrm{MHz}\) |
| L | 1 – 2 GHz |
| S | 2 – 4 GHz |
| C | 4 – 8 GHz |
| X | 8 – 12 GHz |
| Ku | 12 – 18 GHz |
| K | 18 – 27 GHz |
| Ka | 27 – 40 GHz |
| V | 40 – 75 GHz |
| W | 75 – 110 GHz |
| mm | 110 – 300 GHz |
此外,还有两类由SA-6和SA-8发展而来的近程导弹系统。该系列后续型号吸收了S-300系统的诸多特性,以克服特定的电子对抗脆弱性。
单兵便携式防空导弹(MANPADS)系列则是对SA-7的升级,这些都是红外制导的热寻的导弹。
本节仅讨论这些系统的技术特性,不涉及相关保障车辆或作战编制的描述,也不包含导弹、雷达和车辆的图片。这些内容在开源资料(非涉密级别)中有详尽介绍,适当的维基百科条目以及澳大利亚空军力量网站(www.ausairpower.net)都提供了较为全面的覆盖与图片。
我们将使用北约代号讨论这些系统、导弹和雷达。上述在线资料提供了北约代号与俄文代号的对应关系。
所有这些防空导弹系统及其相关子系统的设计均贯彻“隐蔽—发射—转移”的作战理念。目标是尽量在导弹发射前保持隐蔽,然后迅速撤离发射阵地,以避免因敌方反击导弹而损失宝贵的装备。
开源文献对许多现代导弹的细节描述不完整。总体而言,升级越晚,公开资料中对具体性能的描述越少。但收集已有的信息仍然有价值。在本节结尾,我们将讨论这些特性和升级对电子战的影响。
4.3.1 S-300系列¶
S-300系列包括多个防空导弹系统。其共同特点是垂直冷发射、5分钟部署时间以及导弹间3–5秒的发射延迟。图4.41展示了垂直冷发射方式,该方式同样应用于其他新一代导弹。导弹先由气体压力从发射箱或密闭发射舱中弹出,随后通过数据链捕获并转向目标,然后点燃燃料发动机。该系列导弹系统还具备显著的电子防护(EP)特性。
4.3.2 SA-10及其升级¶
陆基SA-10系统有固定与机动版本,使用Grumble导弹和FLAP LID火控系统。该导弹被描述为可攻击马赫4的目标。早期SA-10配套的探测雷达包括TIN SHIELD和CLAM SHELL,后续版本则由BIG BIRD雷达支持。
开源资料显示,SA-10的最初杀伤范围为75 km。经过数次系统改进后,其杀伤范围提升至150 km。SA-10由卡车车载的TELAR发射器发射,采用气压垂直冷发射方式。导弹被推出至几米高空后转向目标,再点燃固体燃料发动机。这种方式使得SA-10具备快速再装填和简化后勤保障的优势,符合“隐蔽—发射—转移”的作战理念。该系统的跟踪雷达为FLAP LID相控阵雷达,具备一定EP能力。开源资料中未具体列出其EP功能,仅指出其天线旁瓣极低。
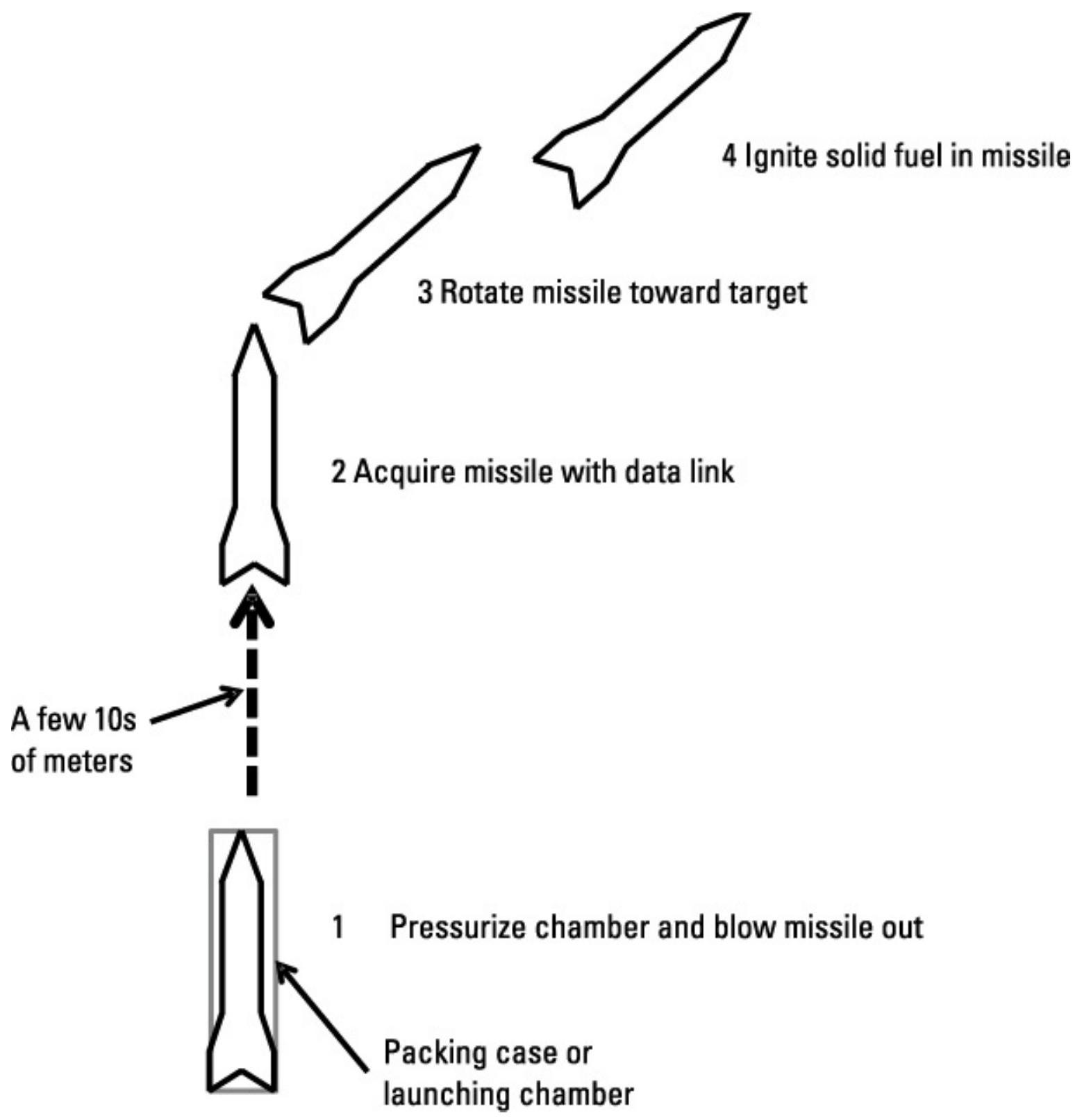
图4.41 冷发射序列:导弹由冷气体从发射舱或发射箱中弹出,然后捕获并转向目标,最后点燃燃料发动机。
4.3.2.1 SA-N-6¶
SA-10的舰载版本称为SA-N-6。开源资料显示其杀伤范围为90 km,使用Grumble导弹由旋转式发射器发射。其跟踪由TOP SAIL、TOP PAIR或TOP DOME雷达提供。该系统采用指令制导,并在末段具备半主动雷达制导模式(见图4.42)。
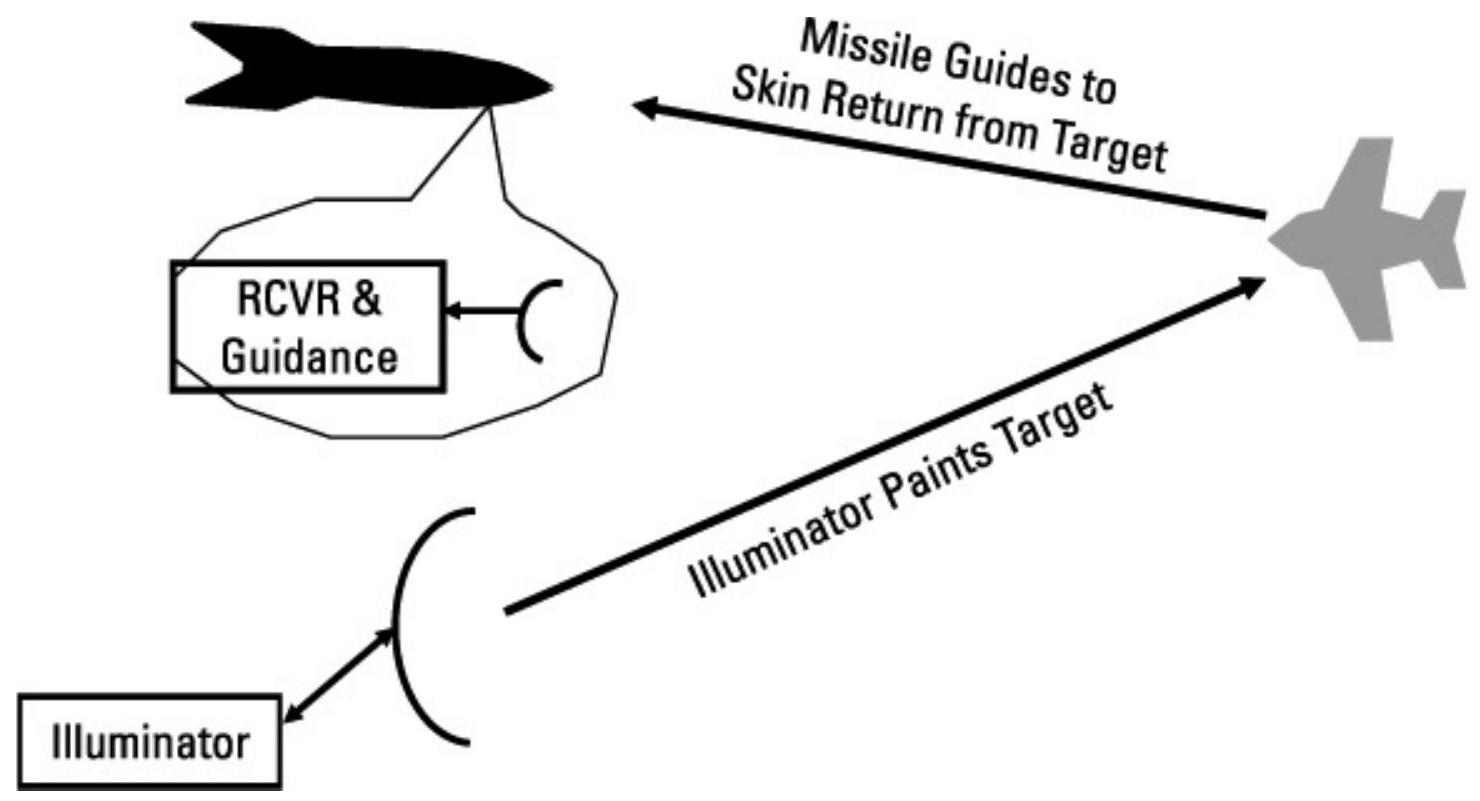
图4.42 半主动末制导在远距离实现精确打击。
4.3.2.2 SA-N-205¶
该型号被描述为马赫6导弹,可拦截马赫8.5的来袭目标。它使用TOMB STONE跟踪雷达,并具备“导弹中继跟踪”(track-via-missile)能力,如图4.43所示。
4.3.2.3 SA-205¶
SA-10升级后装备新导弹Gargoyl和TOMB STONE跟踪雷达,NATO代号为SA-20。据称其可拦截中短程战术导弹及飞机,有效射程为195 km。Gargoyl导弹采用气动舵面之外的气体动力控制,提高了机动性。
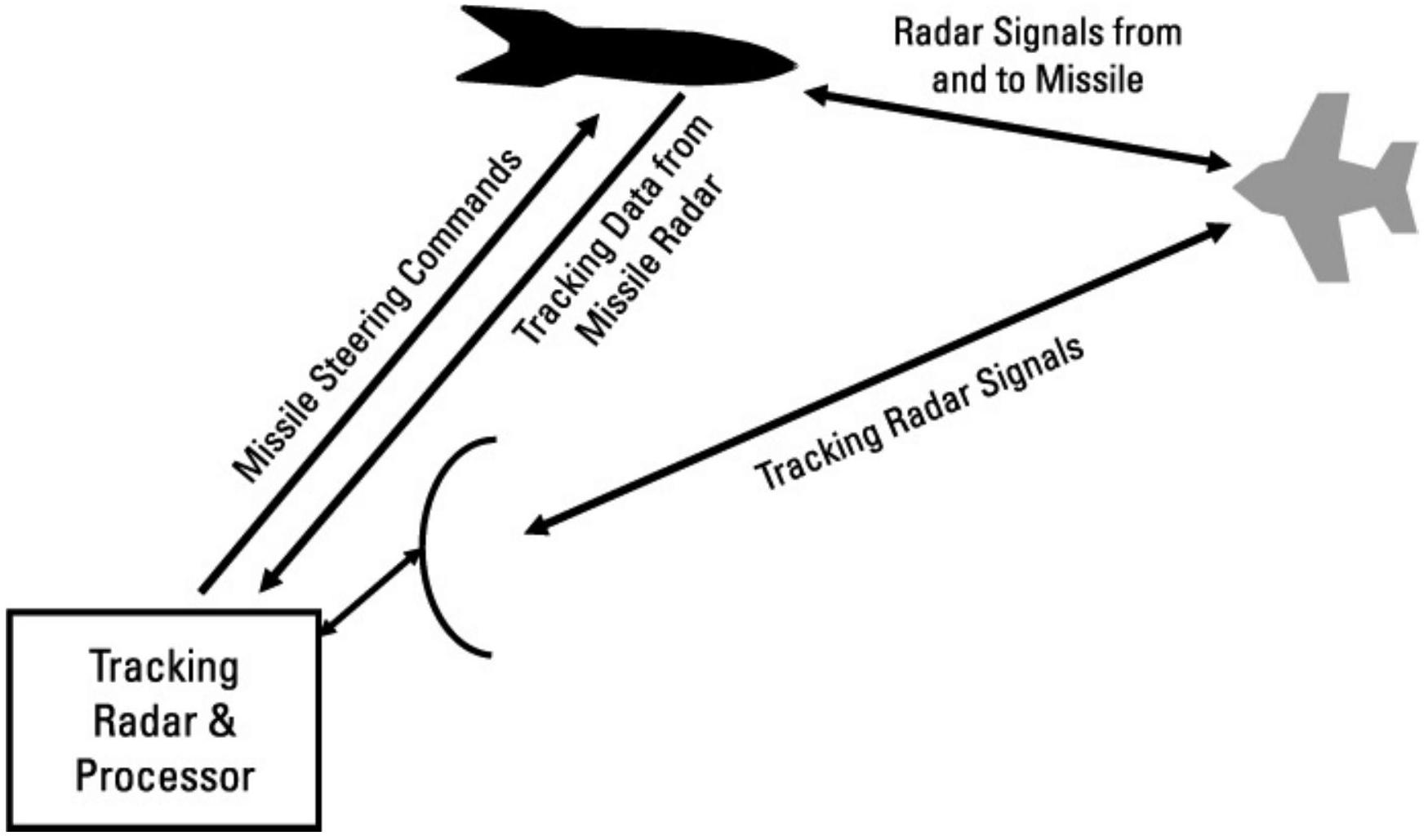
图4.43 当采用导弹中继跟踪时,导弹上的次级雷达对目标进行跟踪,并将信息传回主雷达以提高整体精度。
4.3.2.4 SA-21¶
进一步升级为SA-21,使用GRAVE STONE跟踪雷达和TRIUMF导弹。据称不同型号导弹的射程分别为240 km、396 km和442 km。该导弹专为摧毁远程干扰机和空中预警控制机而设计。其还配备射程74 km的小型导弹,具备极高机动性,能够直接命中目标。
4.3.3 SA-12及其升级¶
SA-12防空系统有两种导弹:GLADIATOR用于对付气动目标,GIANT用于拦截弹道导弹。Gladiator的作战半径为75 km,使用GRILL PAN雷达;Giant射程为100 km,最大拦截高度32 km,使用HIGH SCREEN雷达。
GRILL PAN雷达具备自主搜索能力。SA-12系统采用履带式发射与保障车辆,具备较强的越野机动性。
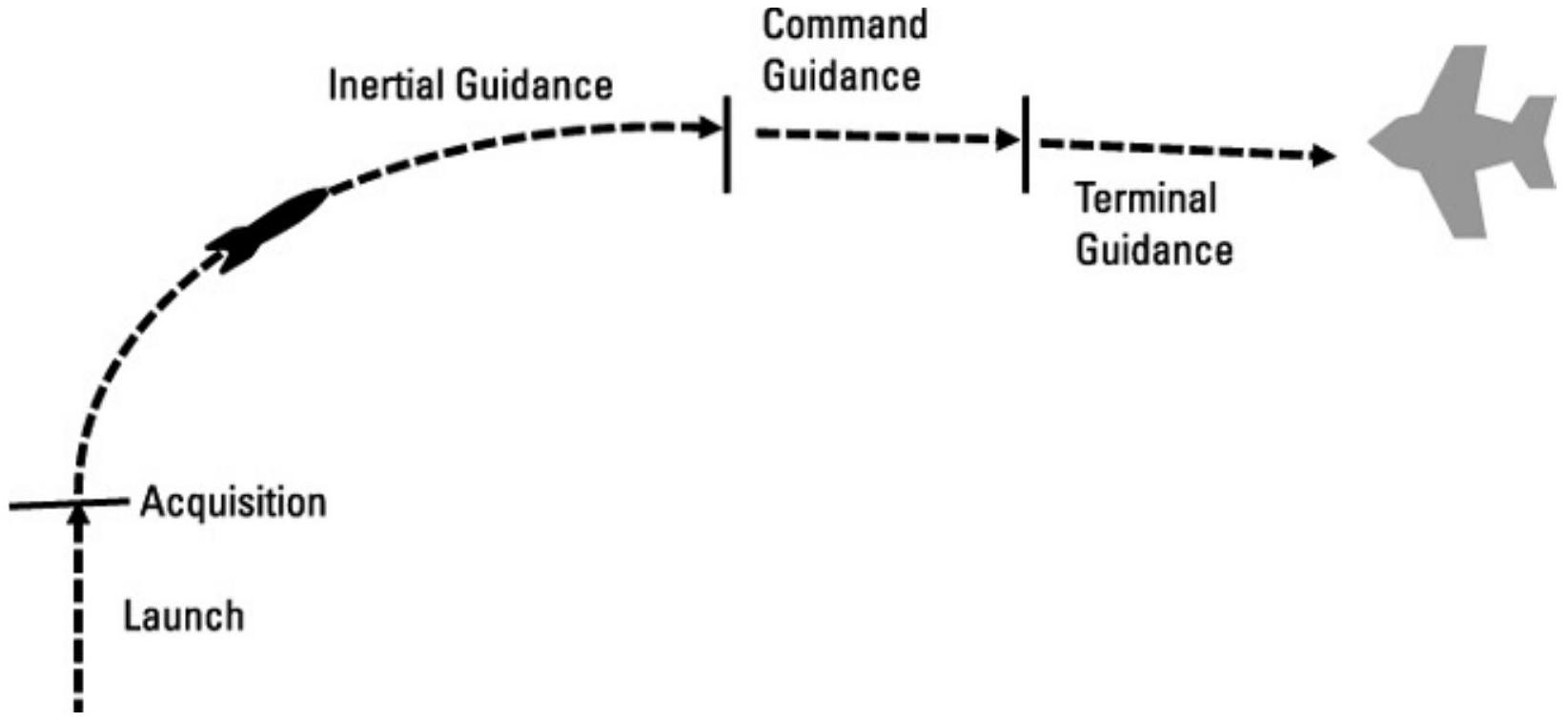
图4.44 许多现代导弹在捕获目标后使用惯性制导,中段转换为指令制导,末段则采用半主动、被动制导或TVM制导。
SA-12升级为SA-23,据称射程达200 km,并具备先进的雷达数据处理能力。其制导方式包括惯性制导、中段指令制导及末段半主动雷达制导,如图4.44所示。该系统在TELAR上配备半主动雷达导引器作为照射机。
4.3.4 SA-6的升级¶
SA-6是短程导弹系统,使用FIRE DOME雷达。其射程在20–30 km之间,可攻击马赫2.8的目标。
该系统升级为SA-11,使用Gainful导弹和STRAIGHT FLUSH有源相控阵雷达。射程描述为35 km。
第二次升级为SA-17系统,射程提升至50 km。
4.3.5 SA-8的升级¶
SA-8是一种低空、短程系统,安装在轮式两栖平台上。其最初射程为\(9 \,\mathrm{km}\),后续改进延长至15 km。该系统使用J波段频率捷变单脉冲跟踪雷达和C波段搜索雷达,还配备有光电(EO)跟踪器。
该系统升级为SA-15,配备了新型雷达和导弹,使用Gauntlet导弹,射程\(12 \,\mathrm{km}\)。其一大特点是系统高度自主,集搜索、指挥控制、导弹发射与制导于同一平台。它具备IFF功能,并使用G/H波段的相控阵脉冲多普勒跟踪雷达。
4.3.6 MANPADS的升级¶
单兵便携式防空导弹(MANPADS)是一种光学瞄准、红外制导导弹系统。开源文献中对这些肩扛式导弹系统的描述如下:该系列的初始型号是SA-7 STRELLA,采用未冷却的硫化铅(PbS)传感器,仅能从后方攻击飞机,射程\(3,700 \,\mathrm{m}\),最大目标高度\(1,500 \,\mathrm{m}\)。
后续的升级型号包括:
- SA-14 GREMLIN:配备更优的冷却导引头,可实现全向攻击,最大高度\(2,300 \,\mathrm{m}\)。
- SA-16 GIMLET:在SA-14基础上改进,采用全向传感器以对抗干扰弹,射程5 km,最大高度\(3,500 \,\mathrm{m}\)。
- SA-18 GROUSE:采用冷却的锑化铟传感器,可全向攻击,射程\(5.2 \,\mathrm{km}\),高度\(3,500 \,\mathrm{m}\)。其抗干扰弹性能显著增强,具备双通道跟踪器。
- SA-24 GRINCH:配备标准夜视功能,射程6 km。
4.4 地空导弹搜索雷达的升级¶
越战时期的地空导弹系统,其跟踪雷达高度依赖搜索雷达。搜索雷达通常工作在VHF或UHF频段,用于捕获目标并将其交给跟踪雷达。近年来发展出了两大趋势:一是部分跟踪雷达集成了搜索模式;二是搜索雷达工作在更高频段。例如,TIN SHIELD和BIG BIRD工作在S波段,而HIGH SCREEN则工作在X波段。
总体而言,更高的工作频率可降低天线带宽,从而提高角分辨率,而更短的波长有助于探测小雷达散射截面(RCS)目标。对隐身飞机、导弹和无人机而言,获取低RCS目标的能力至关重要。随着脉冲压缩技术水平的提升,现代搜索雷达的目标定位精度和分辨率不断提高。
搜索雷达一直拥有显著长于配套跟踪雷达的探测距离,这一特点没有改变。但现代搜索雷达融合了显著的电子防护功能,使其更难被远程干扰机压制。
敌我识别(IFF)功能越来越多地集成在搜索雷达中,以便尽早识别潜在目标。
4.5 防空炮的升级¶
自行高炮系列始于ZSU-23-4 SHILKA,它配备四门23 mm水冷炮,安装在履带式车辆上,射程2.5 km,最大杀伤高度\(1,500 \,\mathrm{m}\)。后来加装了8枚SA-18或SA-16热寻的导弹。该系统配备GUN DISH雷达。
此系统升级为SA-19 TUNGUSKA,配备两门30 mm火炮和8枚雷达指令制导导弹。火炮射程4 km,最大高度3 km;导弹射程8 km,高度3.5 km。该系统配备HOT SHOT雷达,具备C/D波段搜索和J波段双通道单脉冲跟踪功能。
进一步升级为SA-22 GREYHOUND,配备两门30 mm火炮和最多12枚指令制导导弹,并具备雷达或光学跟踪。它也使用HOT SHOT雷达并集成IFF。火炮射程4 km,最大高度3 km;导弹射程20 km,垂直上限10 km。
4.6 上述能力的电子战影响¶
上述现代武器的每一项改进,都对电子战有重要影响。本节将按功能展开,而不针对具体系统,因为这些能力存在于多个系统中,且后续增强版本将不断被集成到导弹和威胁雷达的升级浪潮中。
在描述雷达改进特性影响的同时,将给出相应的应对建议。
4.6.1 杀伤范围的增加¶
远程压制干扰(SOJ)一直是对抗威胁系统的主要技术手段之一。回顾第3章,SOJ通常由两架专用干扰机紧密编队飞行,停留在多套威胁导弹的杀伤范围之外,以保护进入杀伤范围的打击编队。由于需要同时压制多个雷达,因此无法直接干扰威胁雷达的主波束,且干扰机必须将干扰功率分配到多个方向。
SOJ中的\(\mathrm{J}/\mathrm{S}\)计算公式为:
其中,71为常数,\(ERP_{J}\)为干扰机的有效辐射功率(dBm),\(ERP_{R}\)为雷达的有效辐射功率(dBm),\(R_{T}\)为雷达到目标的距离(km),\(R_{J}\)为干扰机到雷达的距离(km),\(G_{S}\)为雷达旁瓣增益(dB),\(G_{M}\)为雷达主瓣增益(dB),\(\sigma\)为目标的雷达散射截面(平方米)。
注意项\(-20 \log R_{J}\),这意味着当干扰机与雷达的距离增加时,\(\mathrm{J}/\mathrm{S}\)按平方衰减。例如,从改进型SA-10的150 km杀伤范围进行干扰,相比于从SA-2的45 km杀伤范围进行干扰,\(\mathrm{J}/\mathrm{S}\)降低20.5倍(13 dB)。若干扰机部署到SA-21的396 km杀伤范围外,则\(\mathrm{J}/\mathrm{S}\)降低77倍(19 dB)。鉴于SOJ本就需要最大化的\(\mathrm{J}/\mathrm{S}\)以克服几何劣势,这一情况非常棘手。
解决方案是增加干扰功率或降低目标的RCS,但需要注意许多威胁雷达升级都增强了对低RCS目标的探测能力。另一种办法是考虑近距干扰,即将(无人)干扰机部署在比目标更靠近威胁雷达的位置。
4.6.2 超低旁瓣¶
超低旁瓣使电子支援(ES)系统更难探测威胁雷达,也使电子攻击(EA)系统更难压制。如果尝试在雷达旁瓣探测,其探测距离按旁瓣衰减平方减少;SOJ等EA系统的\(\mathrm{J}/\mathrm{S}\)也按同样因子降低(见第4.2.1节)。
解决方案是优化ES系统灵敏度,例如使用相控阵接收天线进行扫描,以增加接收信号强度。如果ES系统具备数字接收机,可以通过带宽优化来提高灵敏度。若威胁雷达天线波束扫描,可能在主波束掠过接收天线时获得所需信息。
若EA系统具备有源相控阵(AESA),可以对威胁雷达定向辐射干扰波束,以提升\(\mathrm{J}/\mathrm{S}\)。
4.6.3 相干旁瓣抵消¶
考虑SOJ时,如果威胁雷达具备相干旁瓣抵消(CSLC),它能将旁瓣接收到的窄带干扰信号功率(如FM噪声)削弱高达30 dB。这将使\(\mathrm{J}/\mathrm{S}\)降低30 dB,意味着干扰机需增加30 dB功率,或距离缩短32倍,或受保护飞机的RCS降低1000倍,才能达到同等干扰效果(见第4.2.3节)。
解决方案是混合使用脉冲与FM噪声干扰。脉冲会产生多个CW分量,看似窄带干扰信号,从而占满所有CSLC通道,提升干扰效果。
4.6.4 旁瓣消隐¶
具备旁瓣消隐能力的雷达,在接收到旁瓣方向的脉冲信号强于主天线输出时,会在该脉冲持续的1–数微秒内关闭主天线输出(见第4.2.4节)。
解决方案是调整干扰机的覆盖脉冲,使其覆盖威胁雷达自身的脉冲,从而使雷达等于“自我压制”。
4.6.5 抗交叉极化¶
抗交叉极化指雷达降低交叉极化干扰敏感性的能力。通常以抗交叉极化水平(dB)表述。这可通过平板相控阵天线(边缘无增益倾斜,降低旁瓣)或在馈口处设置极化滤波器实现(见第4.2.6节)。
解决方案是除非能生成极高\(\mathrm{J}/\mathrm{S}\),否则无法对这种雷达实施交叉极化干扰。最好的方法是采用其他干扰手段。
4.6.6 脉冲压缩¶
若干扰信号未包含威胁雷达的压缩波形(线性调频或Barker码),\(\mathrm{J}/\mathrm{S}\)将按压缩因子降低,可达30 dB(见第4.2.10节)。
解决方案是将压缩波形加载到干扰信号中,无论作用于主瓣还是旁瓣。若压缩方式为线性调频,可通过扫频振荡器、直接数字合成器(DDS)等方式复现。但若为非线性调频或Barker码脉冲压缩,则需要在干扰机中引入DRFM(数字射频存储器)。相关内容将在第8章详细讨论。
4.6.7 单脉冲雷达¶
单脉冲雷达不会被第3章所述的部分干扰技术成功压制,反而有些干扰会增强其角度跟踪(见第4.2.5节)。
解决方案是采用第3.4.9节至第3.4.15节中描述的对抗单脉冲雷达的有效干扰技术。
4.6.8 脉冲多普勒雷达¶
脉冲多普勒(PD)雷达希望接收到落入其滤波器组某一通道的相干信号。如果干扰信号填充多个通道,或包含强烈的杂散分量,雷达将识别其受到干扰,并可能启动“寻源制导”(HOJ)。
雷达处理还会降低噪声干扰在多个通道内实现的\(\mathrm{J}/\mathrm{S}\),并能辨别由箔条引起的回波。
它还可以检测分离的信号(如距离门牵引干扰),并跟踪与其接收到的多普勒频移相对应的距离变化率的信号(见第4.2.12节、第4.2.14节和第4.2.15节)。
解决方案是:如果使用相干信号进行干扰,它们会落入单一的PD处理滤波器,并被接受为有效信号,从而干扰有效。如果强干扰信号照射到箔条云上,PD威胁雷达将把箔条云当作诱饵,有效回波源。同样,如果同时进行距离和频率牵引干扰,PD威胁雷达会接受干扰信号为有效回波。这最好通过DRFM实现。
在早期冲突中,曾在大范围投放箔条以阻止雷达发现飞机。在脉冲多普勒雷达能区分箔条之前,这种手段非常有效,但如今用途有限。
4.6.9 前缘跟踪¶
如果威胁雷达具备前缘跟踪功能,RGPO(距离门牵引)干扰机的延迟将使雷达继续跟踪有效的真实回波,因为它永远不会看到延迟的RGPO脉冲。
经典的解决方法是使用RGPI(距离门牵入)干扰。然而,另一种办法是将RGPO处理延迟缩短到足以捕获前缘跟踪器的程度。这通常通过DRFM实现,因为它具有极短的处理延迟。
4.6.10 Dicke修正¶
Dicke修正包括一个宽带通道,其中强而低占空比的脉冲会被削波,防止其捕获后续窄带通道的自动增益控制(AGC)(见第4.2.10节)。
解决方案是使用一种特殊的波形 [1],允许干扰信号穿过Dicke修正。
4.6.11 击穿模式¶
击穿模式是指雷达通过增加有效辐射功率(ERP)或占空比来尽可能延长击穿距离的工作方式。
解决方案是尽可能增加干扰的有效功率。
4.6.12 频率捷变¶
如果雷达采用伪随机脉冲间的频率跳变信号,就无法预测下一脉冲的频率。因此,干扰机必须要么在雷达的每一个频率上干扰,要么将干扰功率分散到整个跳频范围。这将使\(\mathrm{J}/\mathrm{S}\)降低数个分贝(见第4.2.19节)。
解决方案是使用DRFM。若DRFM及其处理器能测量脉冲前约50 ns的信号,就能迅速设置干扰机到该频率。由于现代雷达脉冲通常长达数微秒,丢失这一小部分几乎不会降低干扰能量。相关内容将在第8章讨论。
4.6.13 PRF抖动¶
如果威胁雷达采用伪随机脉冲重复间隔,即抖动PRF,就无法预测下一个脉冲的时间。这使RGPI干扰技术不可行。同时,覆盖脉冲干扰(需要预测脉冲时序)也无法高效生成(见第4.2.20节)。
解决方案是:如果要对抗具备抖动PRF的威胁雷达,应使用延长的覆盖脉冲,以覆盖雷达整个脉冲重复间隔的抖动范围。
4.6.14 寻源制导能力¶
虽然公开资料中没有具体指出本文列出的导弹系统具备寻源制导能力,但显然这种功能已出现在当前或未来的威胁中。
寻源制导(HOJ)意味着能探测干扰的雷达(显然包括脉冲多普勒雷达)可以命令其制导导弹朝干扰信号飞去。这意味着导弹将直接攻击实施自卫干扰(SPJ)的飞机。
同时,考虑执行远程干扰(SOJ)的干扰机。这种飞机是高价值、低存量资产,因此部署在威胁导弹的杀伤范围之外。如果导弹具备HOJ功能,可以通过抛物线弹道增加射程,飞到制导雷达有效射程之外,然后从上方扑向SOJ干扰机。如导弹具备气动控制能力,甚至可在超出燃料允许的射程范围外攻击目标(见第4.2.21节)。
解决方案很明确:不要依赖自卫干扰来保护自己。应使用诱饵替代飞机成为目标。《第10章》描述了多种雷达诱饵类型,可替你吸引导弹;《第8章》讨论了如何利用DRFM技术让诱饵更复杂化。同时还要考虑使用一次性干扰机,如微型空射诱饵J型(MALDJ),它是一种远程干扰机,可以吸引寻源制导导弹。
4.6.15 改进型MANPADS¶
MANPADS武器的改进扩展了射程和有效高度,对直升机及其他低空飞行器构成重大威胁。
解决方案是:过去只需飞得更高即可避免MANPADS威胁,但如今必须考虑采用现代红外干扰机,如第9章所述。
4.6.16 改进型防空炮¶
越战时期,如果飞行高度超过\(1,500 \,\mathrm{m}\),飞行员几乎可以忽视自动高炮(AAA)的存在,因为ZSU-23的最大仰角射高仅此而已。但现在,升级后的AAA增加了热寻导弹,垂直攻击高度可达\(10,000 \,\mathrm{m}\),30 mm火炮的射程也提高到ZSU-23的两倍。
后续升级甚至将单纯的热寻导弹换为雷达制导导弹,使这些武器的威胁显著增加。
要克服这些现代AAA,需要依赖红外和雷达干扰机共同保护。单靠飞得更高已不再安全。
References¶
[1] Schleher, D. C., Electronic Warfare in the Information Age, Norwood, MA: Artech House, 1999. [2] Griffiths, H. G., C. J. Baker, and D. Adamy, Stimson's Introduction to Airborne Radar, 3rd ed., New York: SciTech, 2014. [3] Van Brunt, L. B., Applied ECM, Vol. 1-3, Dun Loring, VA: EW Engineering, Inc., 1978, 1982, 1995.