6. 传统通信威胁¶
6.1 引言¶
本章的主要重点在于无线电传播的基本原理及其在通信电子战(EW)中的应用。本章内容在本书的许多其他部分也会被引用。
本章的其他部分涉及对常规通信信号的截获、辐射源定位以及压制干扰。对于更复杂的信号(主要是低截获概率信号)的电子战功能,将在第7章中进行讨论。
6.2 通信电子战¶
电子战(EW)是一门艺术与科学,其目的在于拒止敌方使用电磁频谱的优势,同时保留友方对该频谱的使用优势。这涵盖整个频谱。在本系列中,我们将重点关注战术通信中最常使用的那部分频谱。在本书中,战术通信不仅仅是指军用点对点无线电通信,还包括基地台与远程军事资产之间的指挥与数据链路、多接收机的广播传输,以及武器的远程引爆。
我们将首先简要回顾甚高频(VHF)、超高频(UHF)以及低微波频段的无线电传播,然后讨论在这些频段内电子支援(ES)、电子进攻(EA)和电子防护(EP)的一些原理和实例。
6.3 单向链路¶
电子战(EW)对雷达和对通信的最大差别在于,雷达通常使用双向链路,即发射机和接收机通常(但并非总是)位于同一位置,且发射信号经目标反射返回。而在通信中,发射机和接收机位于不同的位置。各种通信系统的目的都是将信息从一个位置传送到另一个位置。因此,通信使用的是如图 6.1 所示的单向通信链路。
单向链路包括一个发射机、一个接收机、发射与接收天线,以及信号在两天线之间传输过程中发生的一切。图 6.2 是一个表示单向链路方程的示意图。该图的横坐标并非比例尺,而是用于展示信号在链路中传输时电平的变化。纵坐标是链路中各点的信号强度(以 dBm 表示)。发射功率是发射天线的输入。图中天线增益显示为正值,尽管在实际中任何天线的增益(以分贝表示)都可能为正或负。需要强调的是,这里的增益是指发射天线在接收天线方向上的增益。发射天线的输出称为等效辐射功率(ERP),单位为 dBm。需要注意的是,这里使用 dBm 单位并不严格正确;实际上,此时的信号是功率密度,正确单位应为微伏每米。然而,如果我们假设在发射天线旁边放置一个理想的各向同性天线(忽略近场效应),该天线的输出功率强度即可用 dBm 表示。利用这个理想天线的假设,我们可以在整个链路中用 dBm 来讨论信号强度而无需换算单位,这是一种被广泛接受的做法。信号强度与场强之间的换算公式为:
其中,\(P\) 为到达天线的信号强度,单位 dBm;\(E\) 为到达的场强,单位微伏每米;\(F\) 为频率,单位 MHz。
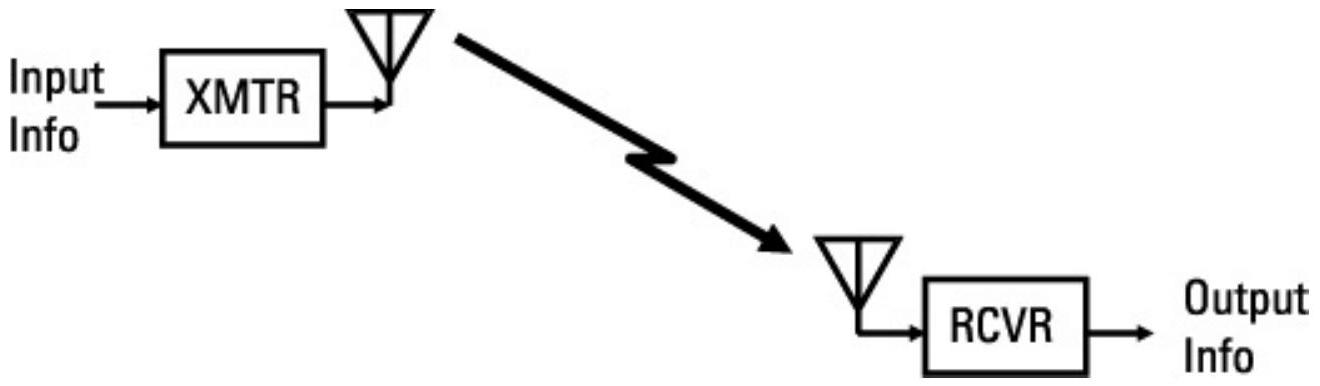
图 6.1 单向通信链路包括发射机、接收机、两副天线,以及天线之间发生的所有过程。
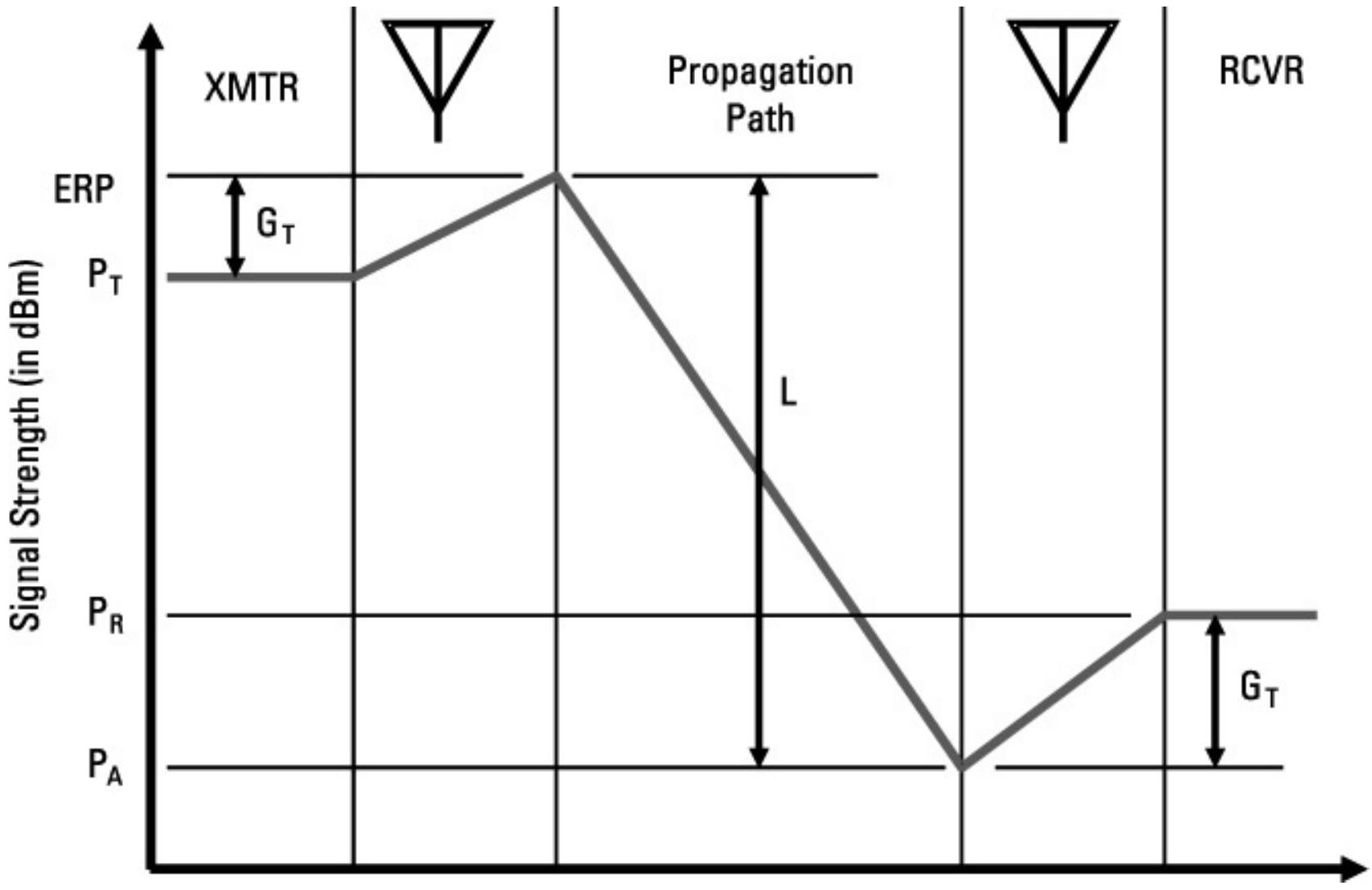
图 6.2 单向链路方程表示接收功率作为其他链路要素的函数。
反之,已知信号强度可以用下式换算为场强:
其中,\(E\) 为场强(微伏/米),\(P\) 为信号强度(dBm),\(F\) 为频率(MHz)。
在发射与接收天线之间,信号会因传播损耗而衰减。我们将对各种传播损耗进行详细讨论。到达接收天线的信号没有常用的符号,在此我们记为 \(P_{A}\),以便后续讨论。由于 \(P_{A}\) 位于天线外,本应以微伏每米表示,但基于相同的理想天线假设,我们用 dBm 单位表示。接收天线的增益同样显示为正值,尽管在实际系统中它可能为正或负。此处的接收天线增益是指接收天线在朝向发射机方向上的增益。
接收天线的输出是接收机系统的输入,单位 dBm,我们称之为接收功率(\(P_{R}\))。单向链路方程给出了 \(P_{R}\) 与链路其他要素的关系。在分贝单位下,该公式为:
其中,\(P_{R}\) 为接收信号功率(dBm),\(P_{T}\) 为发射机输出功率(dBm),\(G_{T}\) 为发射天线增益(dB),\(L\) 为链路损耗(dB),\(G_{R}\) 为接收天线增益(dB)。
在部分文献中,链路损耗被视作增益,但取负值(dB)。在这种记法下,传播增益在公式中是加项而非减项。在本书中,我们始终将损耗视为正数(dB),并在链路方程中用减法表示。
在线性(即非分贝)单位下,该公式为:
其中功率项单位需一致(瓦、千瓦等),增益与损耗为纯比值(无单位)。由于链路损耗位于分母,其比值大于 1。后续讨论中,无论是分贝形式还是线性形式,损耗公式都将损耗视为正数。
图 6.3 和图 6.4 展示了单向链路在电子战中的两个重要应用场景。图 6.3 显示了一个通信链路以及发射机到截收接收机的另一条链路。需要注意的是,发射天线对目标接收机和截收接收机的增益可能不同。图 6.4 显示了一个通信链路以及干扰机到接收机的另一条链路。在这种情况下,接收天线对目标发射机与干扰机的增益也可能不同。这两幅图中的每条链路都包含图 6.2 所示的要素。
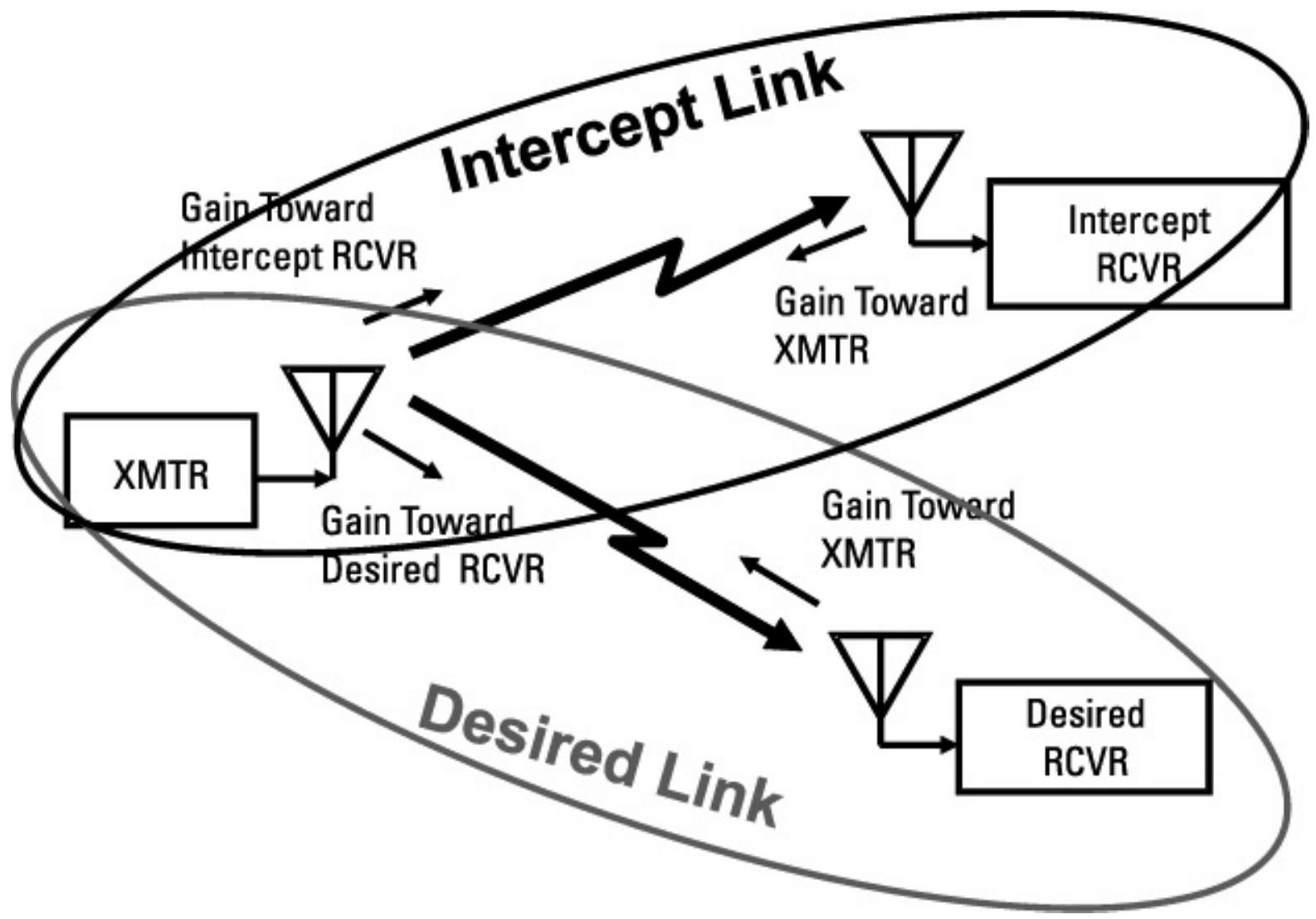
图 6.3 当通信信号被截获时,需要考虑两条链路:发射机到截收接收机的链路,以及发射机到目标接收机的链路。

图 6.4 当通信信号被干扰时,需要考虑两条链路:目标发射机到接收机的链路,以及干扰机到接收机的链路。
6.4 传播损耗模型¶
在链路描述中,我们明确将发射与接收天线增益与链路损耗分开。这意味着链路损耗是指两个单位增益天线之间的损耗。根据定义,各向同性天线的增益为单位增益或 \(0 \,\mathrm{dB}\) 增益。本节中对链路损耗的讨论均指各向同性天线之间的传播损耗。
常用的传播模型有很多,包括用于室外传播的 Okumura 和 Hata 模型,以及用于室内传播的 Saleh 和 SIR-CIM 模型。此外,还存在小尺度衰落,即由多径效应引起的短期波动。这些模型在文献 [1] 中有讨论。这些精细模型通常需要构建环境的计算机模型,以支持对传播环境中每一条反射路径的分析。
由于电子战本质上具有动态特性,实际应用中通常不会采用这些复杂的计算机分析,而是使用三种重要的近似方法来确定合适的传播损耗模型。这三种模型分别是:视距传播模型、双射线模型和刀刃衍射模型。
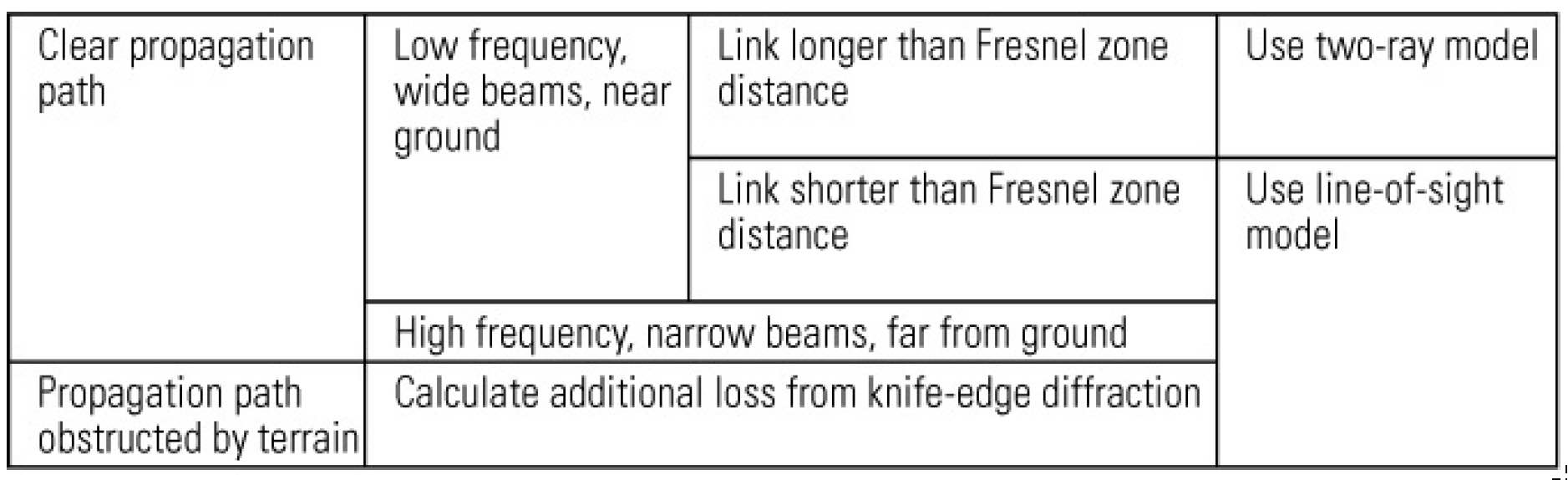
文献 [1] 也在一定程度上讨论了这三种传播模型。表 6.1 总结了这三种模型的适用条件。
表 6.1 适当传播损耗模型的选择
(表格文字对照如下)
| 清晰传播路径 | 低频、宽波束、近地面 | 链路长于菲涅尔区距离 | 使用双射线模型 |
|---|---|---|---|
| 链路短于菲涅尔区距离 | 使用视距传播模型 | ||
| 高频、窄波束、远离地面 | |||
| 传播路径被地形阻挡 | 计算刀刃衍射的额外损耗 |
6.4.1 视距传播¶
视距(LOS)传播损耗也称为自由空间损耗或扩展损耗。它适用于空间传播以及发射机与接收机之间不存在显著反射体,且地面相对于信号波长而言足够远的环境(见图 6.5)。
LOS 损耗公式源于光学,其中传播损耗通过将发射孔径和接收孔径投影到以发射机为原点的单位球面上来计算。将其转化为射频传播时,考虑的是两个各向同性天线的几何关系。如图 6.6 所示,各向同性发射天线以球面形式辐射信号,其总能量分布在球面上。球体以光速扩展,直到其表面覆盖接收天线为止。

图6.5 如果发射机和接收机位于远高于地面的多个波长处,或者天线波束足够窄,以至于排除了向地面发射和来自地面的显著能量,则视距传播模型是适用的。
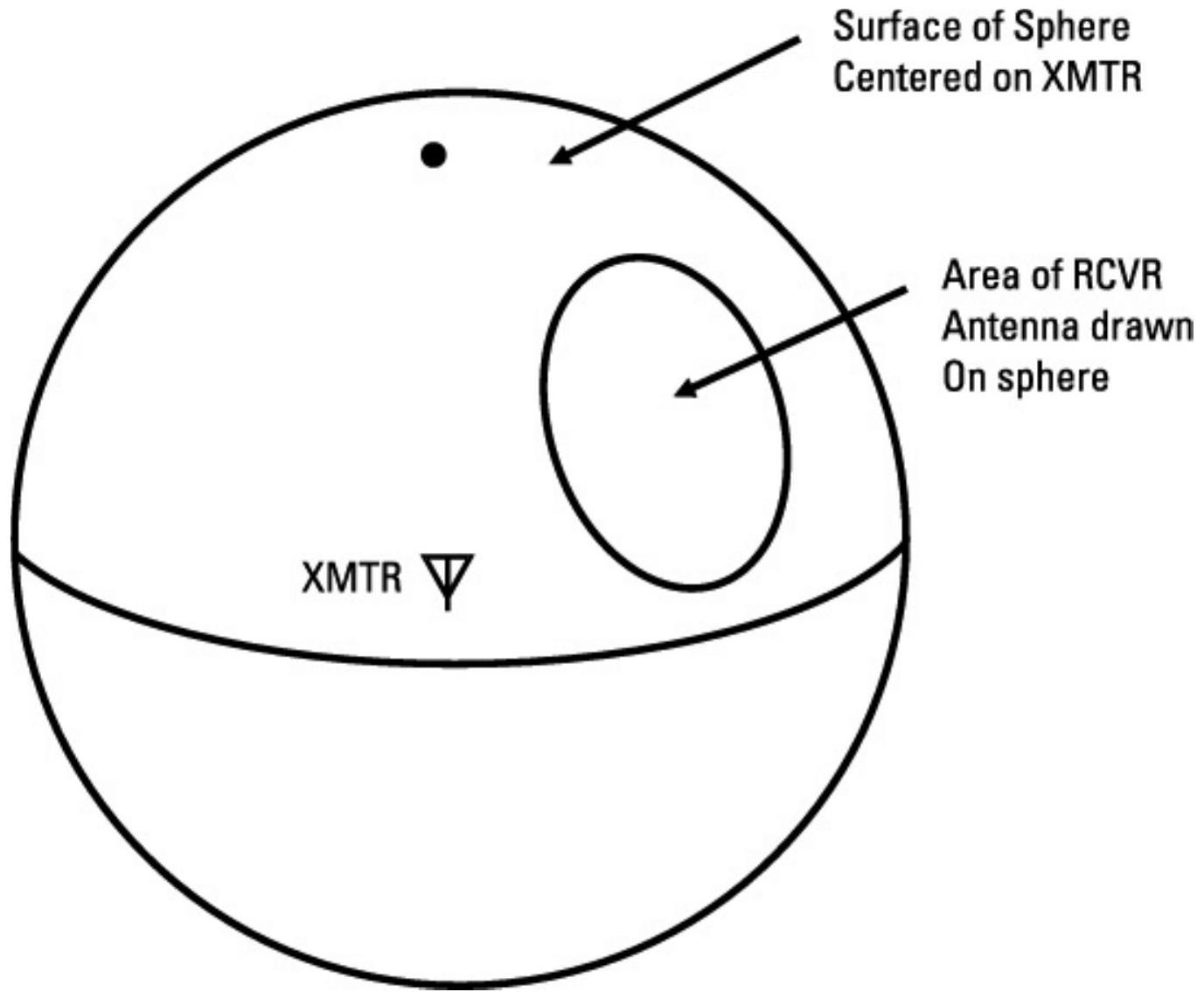
图6.6 视距损耗是以发射机为中心、半径等于传播距离的球面表面积与接收天线有效面积的比值。
球体表面积为:
其中 \(R\) 在此为发射机到接收机的距离。
各向同性(即单位增益)接收天线的有效面积为:
其中 \(\lambda\) 是发射信号的波长。
我们希望损耗是一个大于 1 的数值,以便通过将发射功率除以损耗来得到接收功率。因此,损耗比可由球体表面积与接收天线面积之比确定:
其中半径和波长必须使用相同单位(通常为米)。
需要注意的是,一些作者将其视为增益,用该增益乘以发射信号,这相当于对公式右侧取倒数。
若将波长换算为频率,损耗公式变为:
其中 \(R\) 为传播路径距离(米),\(F\) 为发射频率(赫兹),\(c\) 为光速( \(3 \times 10^{8} \,\mathrm{m/s}\) )。
如果允许距离以公里输入、频率以兆赫兹输入,则需要一个换算因子。将各项合并并换算为分贝形式,得到的损耗为:
其中 \(R\) 为链路距离(公里),\(F\) 为发射频率(兆赫兹)。常数 32.44 综合了换算因子以及 \(c\) 和 \(\pi\) 项的分贝换算值。使用该常数可以方便地用常见单位输入链路参数。
该公式的等效形式在使用不同距离单位时常数不同:若距离为英里,常数为 36.52;若距离为海里,常数为 37.74。该公式在应用中常用于 \(1\,\mathrm{dB}\) 精度的场合,此时常数分别近似为 32、37 和 38。
有一种广泛使用的诺莫图(nomograph)可以直接给出视距损耗(单位:分贝),其自变量为传播距离和频率,如图 6.7 所示。使用方法是:在兆赫兹为单位的频率和公里为单位的链路距离之间画一条直线,该直线与中轴的交点即为 LOS 损耗(分贝)。在该图中,1 GHz、10 km 的损耗显示为略低于 113 dB,而上述公式计算结果为 112.44 dB。
6.4.2 双径传播¶
当发射和接收天线靠近单一主导反射面(如地面或水面),且天线方向图足够宽以覆盖该反射面时,必须考虑双径传播模型。正如我们将看到的,发射频率和实际天线高度决定了适用的是双径传播模型还是视距(LOS)传播模型。
双径传播也称为 \(40 \log (d)\) 或 \(d^{4}\) 衰减,因为损耗随链路距离的四次方变化。双径传播中的主要损耗来自直接波与来自地面或水面的反射波之间的相位抵消,如图 6.8 所示。衰减量取决于链路距离以及发射和接收天线相对于地面或水面的高度。需要注意的是,与 LOS 衰减不同,双径传播损耗公式中没有频率项。在非对数形式下,双径传播损耗为:
其中,\(d\) 为链路距离,\(h_{T}\) 为发射天线高度,\(h_{R}\) 为接收天线高度。
链路距离和天线高度必须采用相同的单位。
双径传播损耗的分贝形式为:
其中,\(d\) 为链路距离(公里),\(h_{T}\) 为发射天线高度(米),\(h_{R}\) 为接收天线高度(米)。
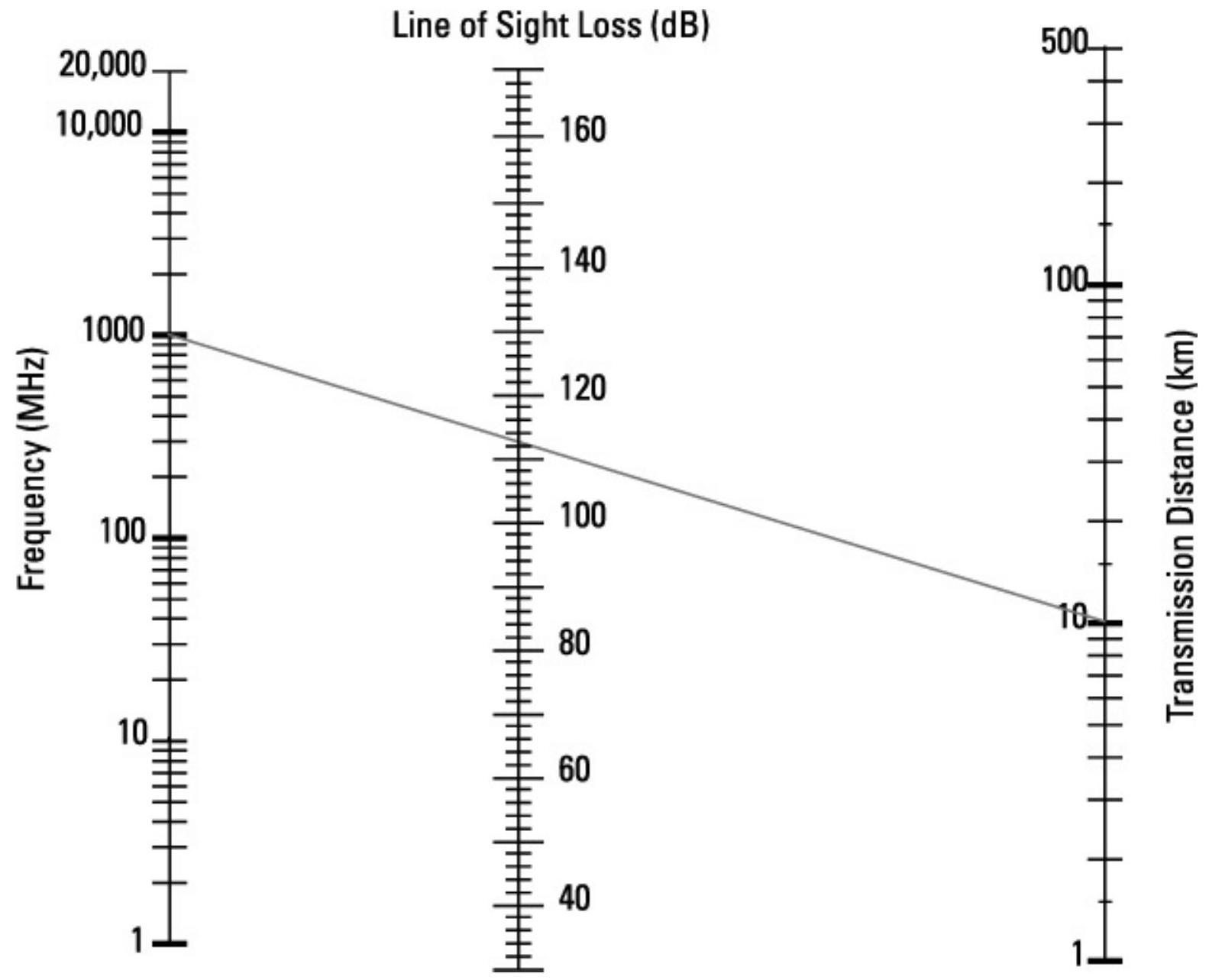
图6.7 从频率值到传输距离值画一条直线,其交点对应于视距损耗值。
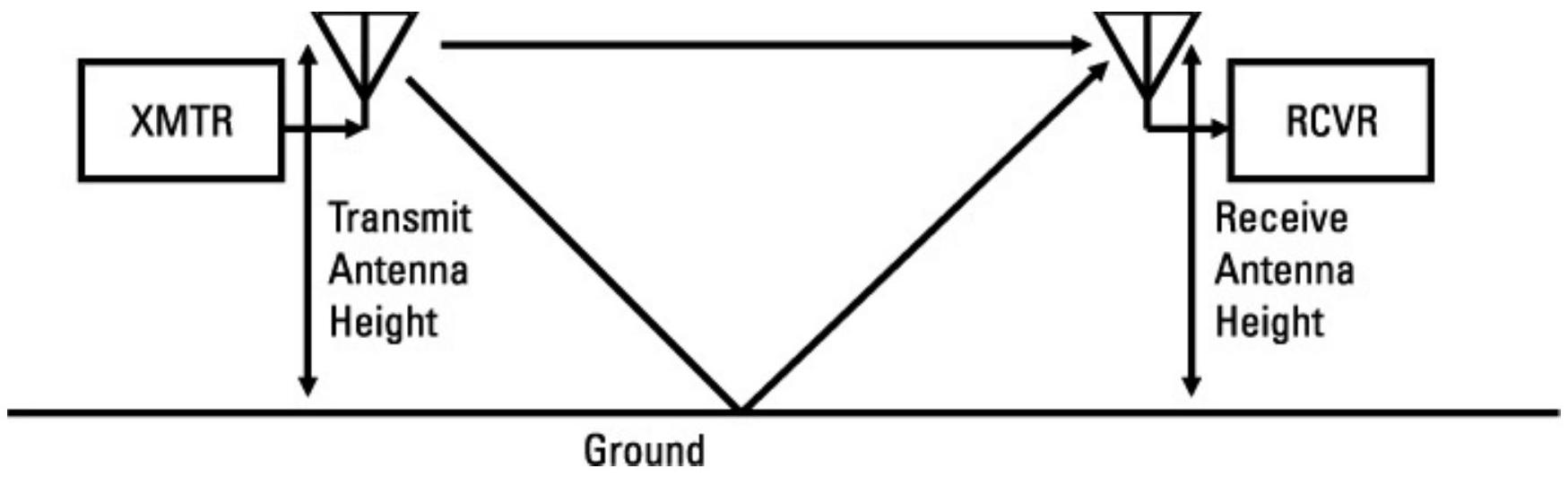
图6.8 在双径传播中,主要的损耗效应是直射信号与反射信号之间的相位抵消。
图 6.9 给出了计算双径损耗的诺莫图。使用方法为:首先在发射和接收天线高度之间画一条直线。然后,从该直线与索引线的交点处画一条线,穿过路径长度,延伸到传播损耗线。在示例中,两副高度为 \(10\,\mathrm{m}\) 的天线相距 30 km,衰减略低于 140 dB。若利用上述公式计算,实际值为 139 dB。
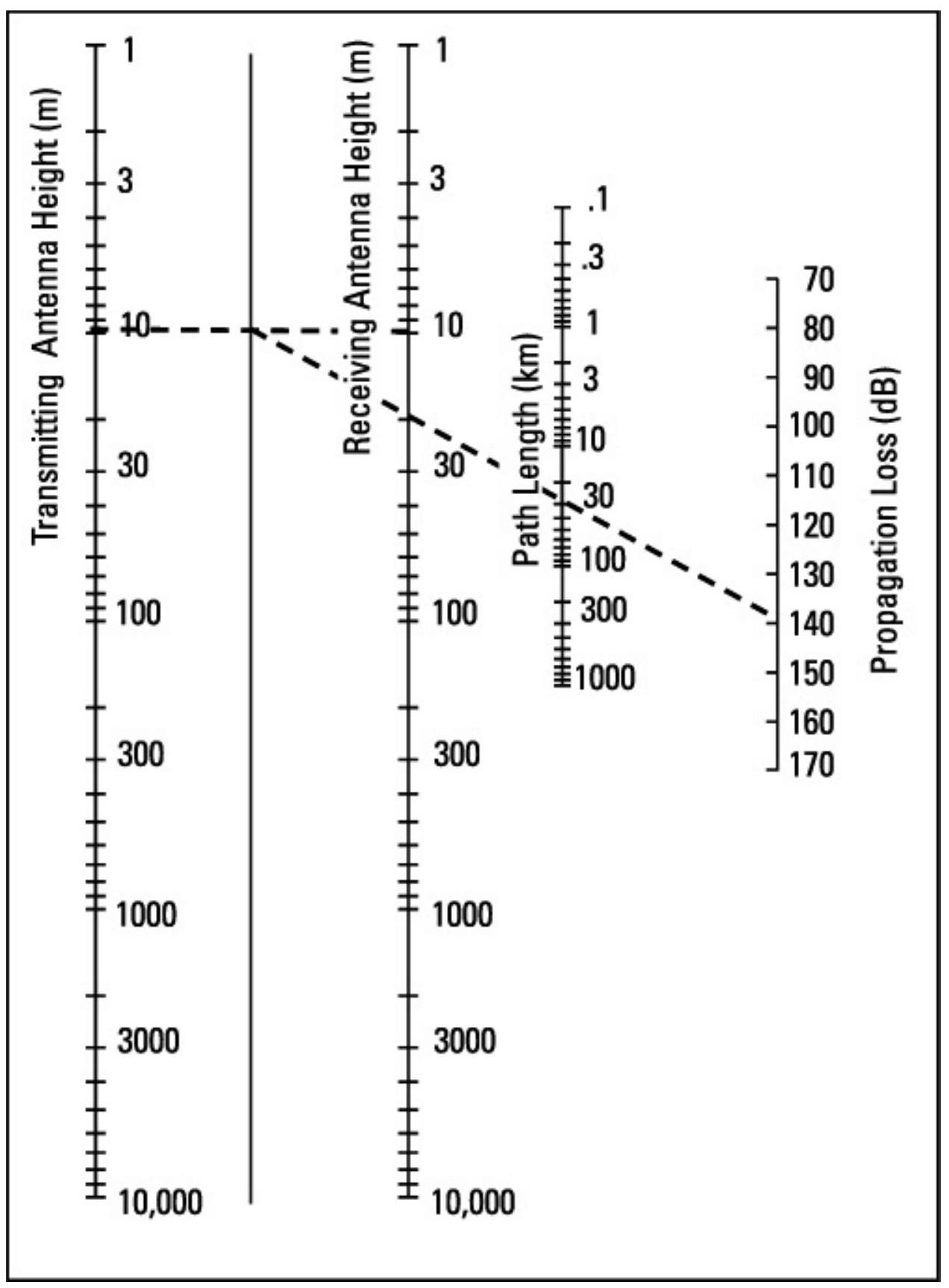
图6.9 双径传播损耗可按照该诺莫图(nomograph)所示方法确定。
6.4.3 双径传播的最小天线高度¶
图 6.10 显示了双径传播计算所需的最小天线高度与传输频率的关系。图中共有五条曲线,分别对应:
- 海水上的传输;
- 在良好土壤上的垂直极化传输;
- 在劣质土壤上的垂直极化传输;
- 在劣质土壤上的水平极化传输;
- 在良好土壤上的水平极化传输。
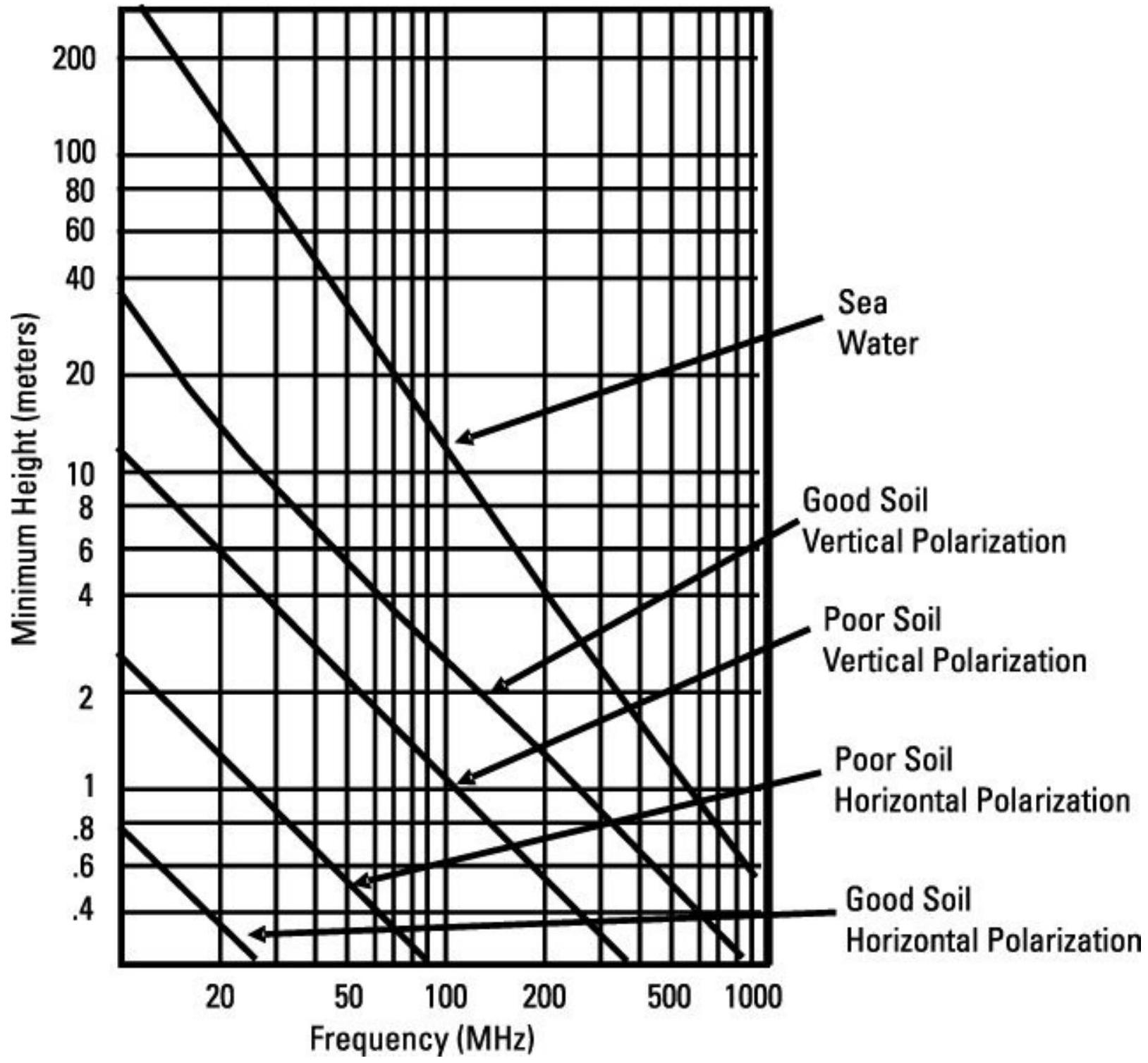
图6.10 如果天线低于该图中所示的最小高度,则在双径传播损耗计算中应采用图中给出的最小高度。
良好土壤可提供良好的地面反射面。如果任一天线高度低于图中相应曲线所示的最小高度,则在进行双径传播损耗计算时,应使用图中所示的最小天线高度替代实际高度。需要注意的是,如果某一天线实际上处于地面高度,则该图的适用性非常可疑。
6.4.4 关于超低天线的说明¶
在通信理论文献中,有关超低天线的讨论几乎都局限于至少高于地面半个波长的天线高度。近期一次(尚不完整的)测试为低于该高度的天线性能提供了一些见解。实验中使用了一部 \(400\,\mathrm{MHz}\)、垂直极化、1 米高的发射机,与匹配的接收机进行不同距离的传输试验,并逐步将接收机从 1 米高度降低至地面。在平坦、干燥的地面上,当接收天线位于地面时,接收功率降低了 24 dB。而当传输路径上(靠近接收端)存在一条 1 米深的沟槽时,该损耗减小至 9 dB。
6.4.5 菲涅尔区¶
如前所述,接近地面或水面的传播信号可能经历 LOS 或双径传播损耗,这取决于天线高度和传输频率。菲涅尔区距离定义为从发射机起算、相位抵消开始在传播损耗中占主导的距离。如图 6.11 所示,如果接收机距发射机的距离小于菲涅尔区距离,则采用 LOS 传播;若接收机距离大于菲涅尔区距离,则采用双径传播。在任一情况下,整个链路均服从相应的传播模型。
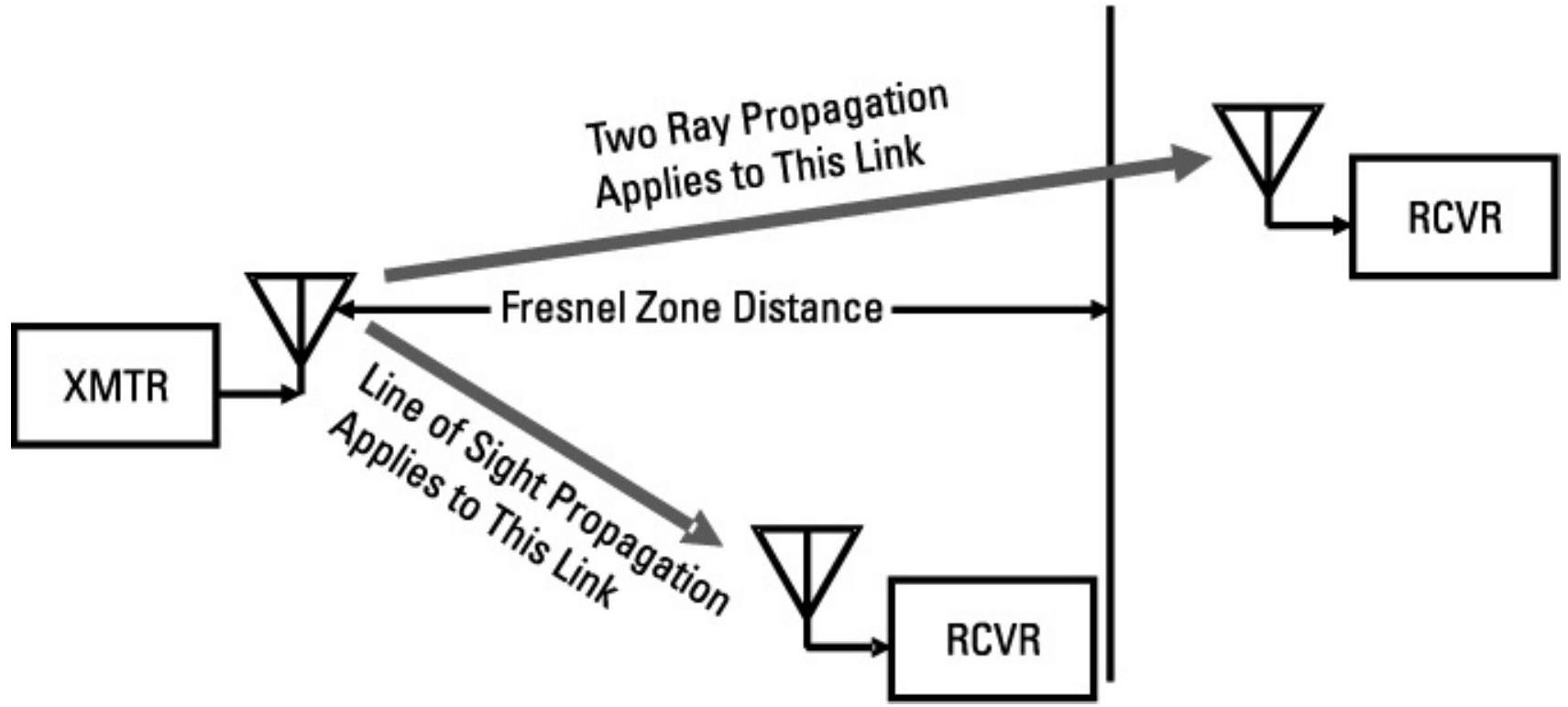
图6.11 如果链路长度短于菲涅尔区距离,则采用视距传播;如果链路长度长于菲涅尔区距离,则采用双径传播。
菲涅尔区距离由下式计算:
其中,\(FZ\) 为菲涅尔区距离(米),\(h_{T}\) 为发射天线高度(米),\(h_{R}\) 为接收天线高度(米),\(\lambda\) 为传输波长(米)。
文献中存在若干不同的菲涅尔区公式。此处采用的公式是因为它能给出 LOS 与双径衰减相等时的距离。更便捷的形式为:
其中,\(FZ\) 为菲涅尔区距离(公里),\(h_{T}\) 为发射天线高度(米),\(h_{R}\) 为接收天线高度(米),\(F\) 为传输频率(MHz)。
6.4.6 复杂反射环境¶
在反射环境极为复杂的地区(例如图 6.12 所示的沿山谷传播),文献建议使用 LOS 传播损耗模型将比双径传播模型给出更为准确的结果。
6.4.7 刀刃衍射¶
非视距(NLOS)传播穿越山脉或山脊线时,通常被估算为刀刃衍射。这是一种非常常见的做法,许多电子战专业人员报告称,在地形中的实际损耗与等效的刀刃衍射估算结果非常接近。
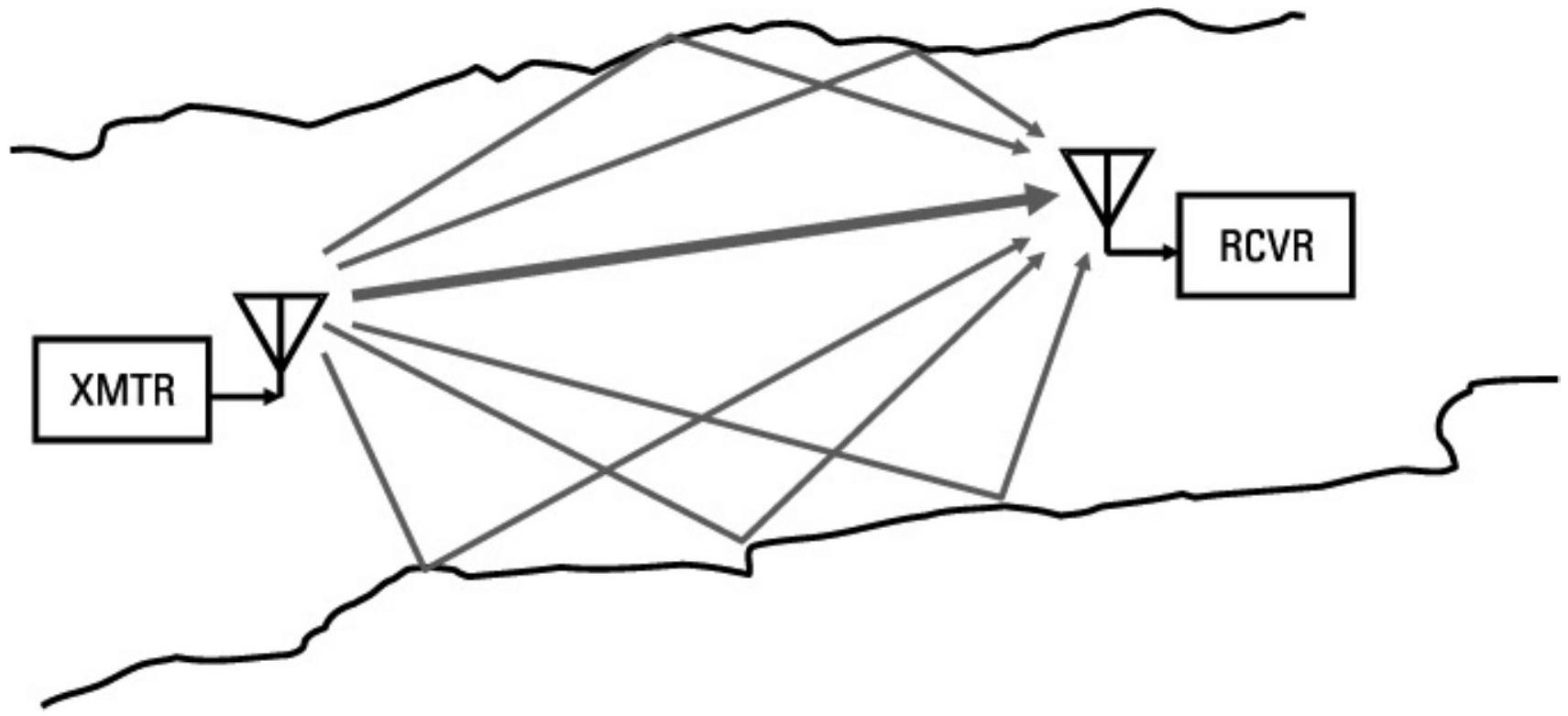
图 6.12 在高度复杂的反射环境中(如沿山谷传播),实际传播损耗预计更接近视距传播而非双径传播。
刀刃衍射(KED)衰减是附加在未受阻挡时的视距损耗上的。需要注意的是,当存在刀刃或等效障碍时,应采用 LOS 损耗模型,而非双径损耗模型(见图 6.13)。
链路在刀刃上的几何关系如图 6.14 所示。\(H\) 表示从刀刃顶部到假想无障碍视距路径的垂直距离。发射机到刀刃的距离记为 \(d_{1}\),刀刃到接收机的距离记为 \(d_{2}\)。发生 KED 的条件是 \(d_{2}\) 至少等于 \(d_{1}\)。如果接收机比发射机更靠近刀刃,则其处于盲区,此时只能依靠对流层散射(伴随显著损耗)建立链路连接。
如图 6.15 所示,即使视距路径从山峰上方经过,只要高度未超过若干个波长,刀刃仍会引起衰减。因此,高度 \(H\) 可以是视距路径相对于刀刃的上方距离或下方距离。
图 6.16 给出了 KED 计算的标尺图。左侧刻度是距离参数 \(d\),其由下式计算:
表 6.2 给出了一些 \(d\) 的计算示例。
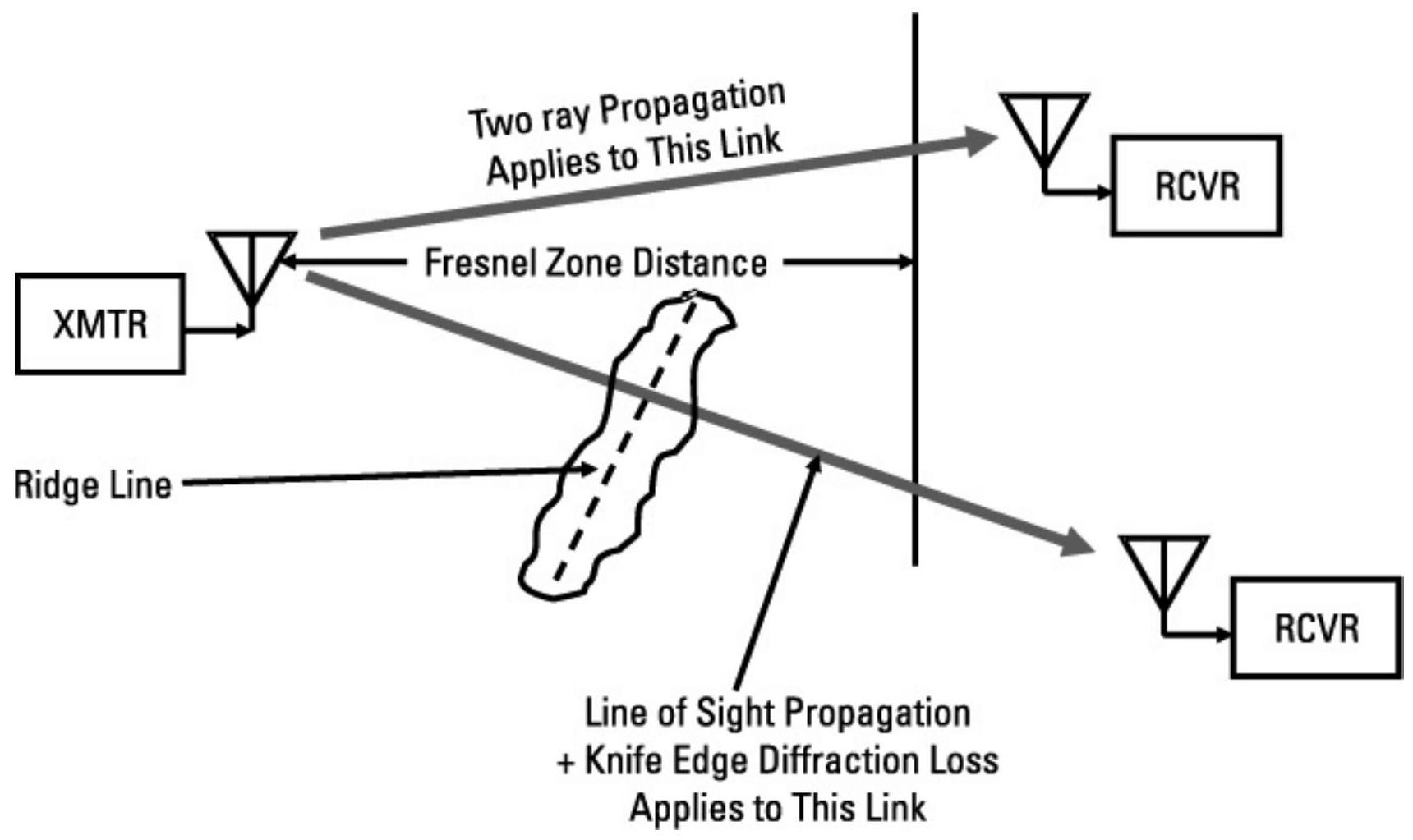
图 6.13 即使链路距离大于菲涅尔区距离,只要中间存在山脊线,仍需采用视距传播模型。
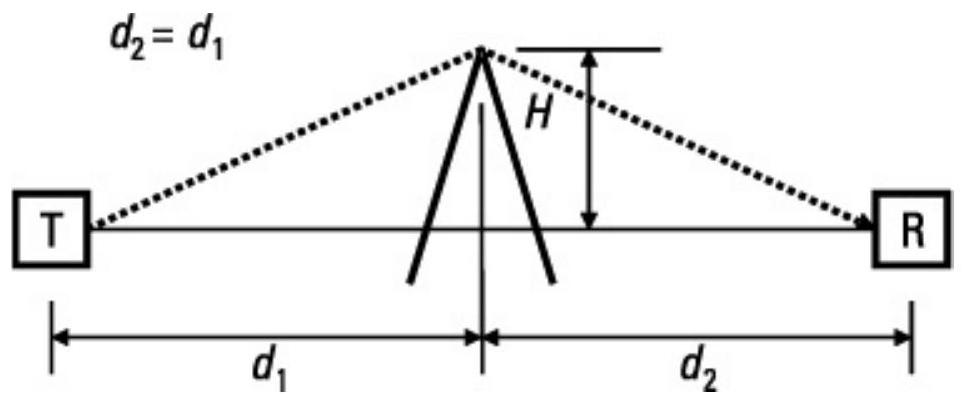
图 6.14 刀刃衍射几何关系由发射端到刀刃的距离、刀刃到接收端的距离,以及刀刃相对于假想视距路径的高度决定。
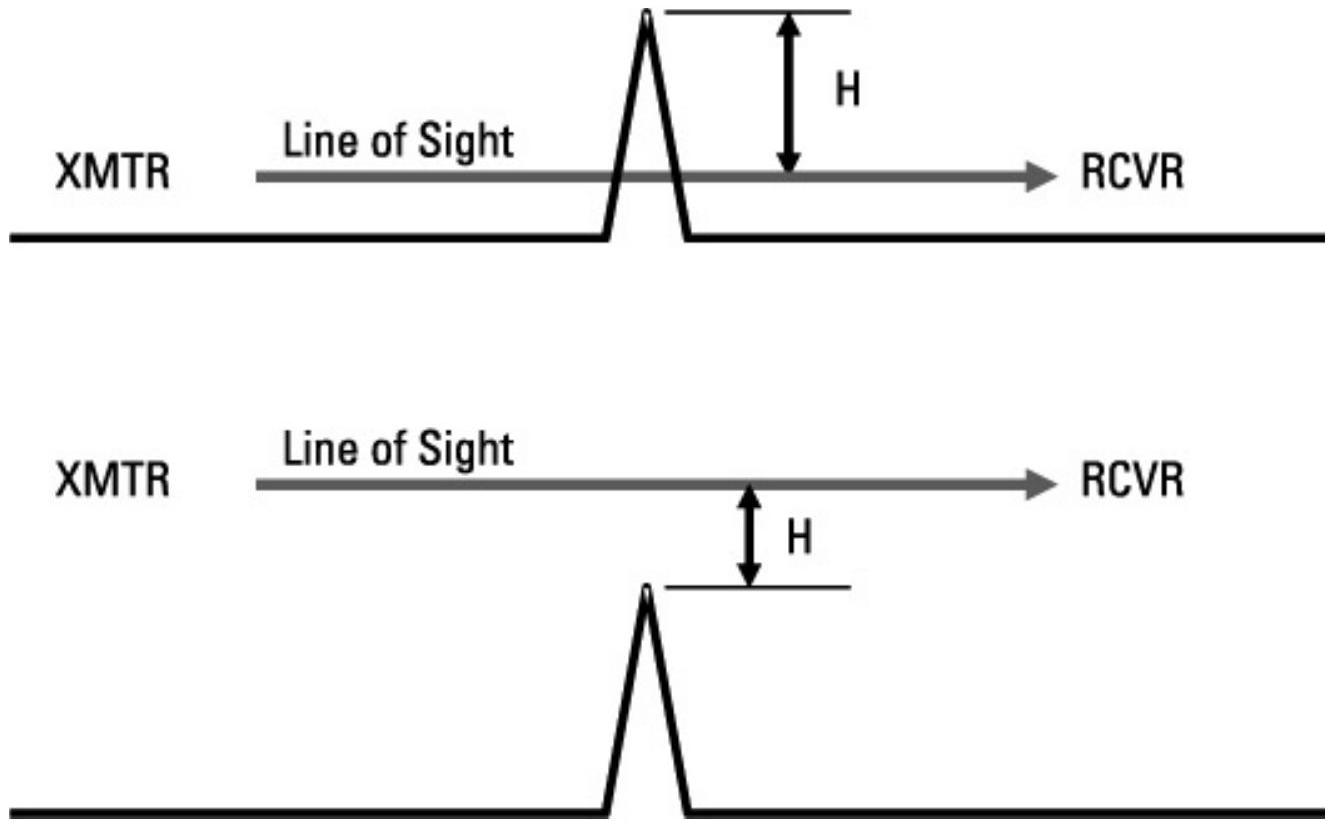
图 6.15 视距路径可能在刀刃上方或下方通过。若未高出太多,仍会产生刀刃衍射损耗。
若略去此步骤并直接取 \(d=d_{1}\),KED 衰减估算的精度仅会降低约 1.5 dB。
回到图 6.16,首先将 \(d\)(公里)与 \(H\)(米)连线,此时无需关心 \(H\) 是高于还是低于刀刃。将该连线延伸至中心索引线。
再从该交点引一条连线,穿过传输频率值(MHz),延伸至右侧刻度,即可得到 KED 衰减值。在此时再区分 \(H\) 的方向:若 \(H\) 为刀刃上方距离,则在左刻度读取 KED 衰减;若 \(H\) 为刀刃下方距离,则在右刻度读取。
举例说明(标注在标尺图上):\(d_{1}=10\,\mathrm{km}\),\(d_{2}=24.1\,\mathrm{km}\),视距路径低于刀刃 45 m。由表 6.2 可知 \(d=10\,\mathrm{km}\),\(H=45\,\mathrm{m}\),频率为 150 MHz。若视距路径在刀刃上方 45 m,KED 衰减为 2 dB;但由于其在刀刃下方 45 m,KED 衰减为 10 dB。
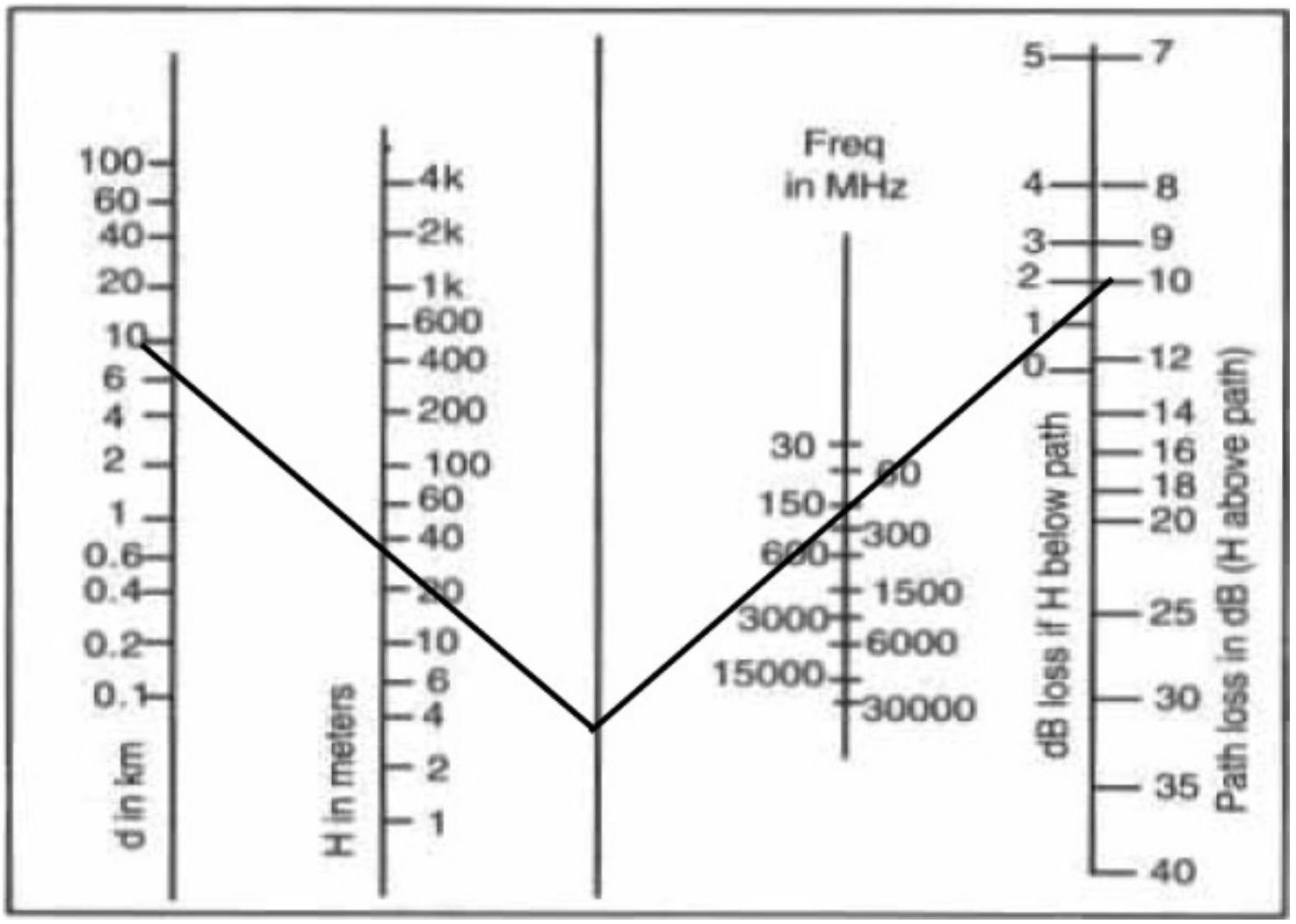
图 6.16 刀刃衍射衰减可由 \(d\)、\(H\) 和频率的数值在图表中直观确定。
总链路损耗即为 LOS 损耗(不考虑刀刃)与 KED 衰减之和:
因此,总链路损耗为 \(106.6 + 10 = 116.6 \,\mathrm{dB}\)。
6.4.8 刀刃衍射(KED)的计算¶
KED 的精确数学计算非常复杂,因此文献 [1] 建议采用分段近似方法。
首先,需要通过下式计算一个中间值 \(v\):
表 6.2 \(d\) 的数值
| 条件 | \({ }_{d}\) |
|---|---|
| \(d_{2}=d_{1}\) | \(0.707 d_{1}\) |
| \(d_{2}=2 d_{1}\) | \(0.943 d_{1}\) |
| \(d_{2}=2.41 d_{1}\) | \(d_{1}\) |
| \(d_{2}=5 d_{1}\) | \(1.178 d_{1}\) |
| \(d_{2} >> d_{1}\) | \(1.414 d_{1}\) |
其中 \(d_{1}\)、\(d_{2}\) 和 \(H\) 的定义与图 6.2 相同,\(\lambda\) 为传输波长。
表 6.3 给出了 KED 增益随变量 \(\boldsymbol{v}\) 变化的函数关系。需要注意,KED 损耗(以分贝计)是增益(以分贝计)的相反数。
这种分段解法可以在 Excel、Mathcad 或类似软件中实现,但若进行人工计算,推荐使用图 6.16 所示的标尺图。
6.5 敌方通信信号的截获¶
6.5.1 定向传输的截获¶
图 6.17 所示的情况是敌方接收机对数据链路的截获。发射机使用一副定向天线指向目标接收机,而敌方接收机并未位于发射天线方向图的主瓣之内。发射机和接收机均位于高地,因此接收天线未受到来自局部地形的显著反射照射。这意味着传播损耗由第 6.4.1 节讨论的视距(LOS)模型决定。
截获接收机接收到的功率等于发射功率,加上发射天线在截获接收机方向上的增益,减去传播损耗,再加上接收天线在发射机方向上的增益。因此,接收功率按下式计算:
表 6.3 KED 增益与 \(v\) 的关系
| v | \(G\)(分贝) |
|---|---|
| \(v<1\) | 0 |
| \(0<v<1\) | \(20 \log _{10}(0.5+0.62 v)\) |
| \(-1<v<0\) | \(20 \log _{10}(0.5 \exp [0.4-[0.95 v])\) |
| \(-2.4<v<-1\) | \(20 \log _{10}\left(0.4-\operatorname{sqrt}\left[0.1184-(0.1 v+0.38)^{2}\right)\right]\) |
| \(v<-2.4\) | \(20 \log _{10}(0.225 / v)\) |
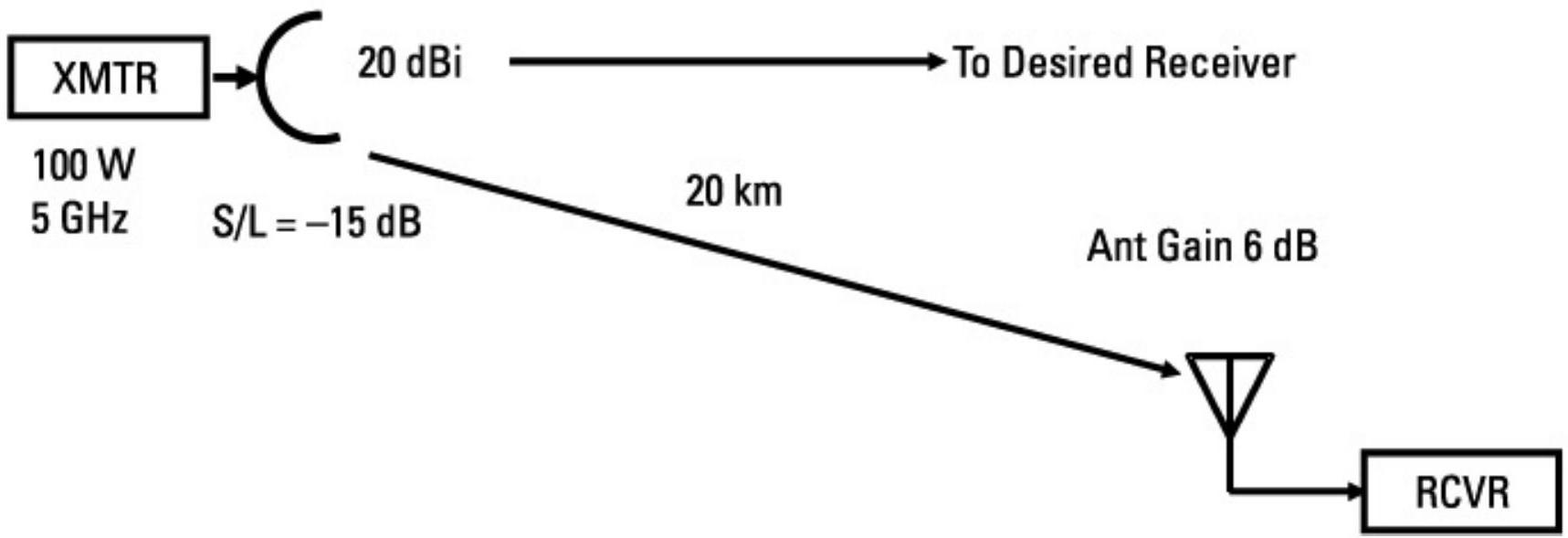
图 6.17 从敌方发射机到截获接收机的链路分析决定了截获质量。
其中,\(P_{R}\) 为接收功率,\(G_{T}\) 为发射天线在接收机方向上的增益,\(d\) 为链路距离(千米),\(f\) 为发射频率(兆赫),\(G_{R}\) 为接收天线在发射机方向上的增益。
链路发射机在 5 GHz 频率下向天线输出 100 W(即 50 dBm)。发射天线在主瓣方向上的增益为 \(20 \ \mathrm{dBi}\),而接收机位于 \(-15 \ \mathrm{dB}\) 的旁瓣中(即比主瓣峰值低 15 dB),因此该截获链路的发射天线增益为 5 dB。接收天线指向发射机,增益为 \(6 \ \mathrm{dBi}\)。链路发射机在 5 GHz 下输出 \(100 \ \mathrm{W}\)。截获接收机中的接收功率计算如下:
6.5.2 非定向传输的截获¶
在图 6.18 所示的截获情形中,发射机和接收机均接近地面,并配备宽角覆盖天线;因此,它们可能受到视距(LOS)或双射线(two-ray)传播的影响。合适的传播模式由 Fresnel 区距离计算确定,公式如下(参见第 6.4.5 节):
其中,\(F Z\) 为 Fresnel 区距离(单位:千米),\(h_{T}\) 为发射天线高度(单位:米),\(h_{R}\) 为接收天线高度(单位:米),\(f\) 为发射频率。

图 6.18 来自地面发射机到地面截获系统的信号,根据链路几何条件,可受视距传播或双射线传播影响。
如果发射机到接收机的路径长度小于 Fresnel 区距离,则采用 LOS 传播;如果路径长度大于 Fresnel 区距离,则采用双射线传播。
目标发射机为手持按键通话系统,配备鞭状天线,高度 1.5 m。注意,鞭状天线的有效高度位于天线底部。接收天线增益为 \(2-\mathrm{dBi}\)。目标发射机的有效辐射功率(ERP)为 \(1 \mathrm{~W}(30 \mathrm{dBm})\),频率为 100 MHz。Fresnel 区距离为:
Fresnel 区距离远小于 \(10-\mathrm{km}\) 的路径距离,因此采用双射线传播。
根据第 6.4.2 节的公式,传播损耗为:
因此,截获接收机的接收功率计算为:
代入图 6.18 的数值:
该截获问题的另一个复杂之处在于截获接收机具有相对宽的带宽。如果发射机带宽为典型的 \(25-\mathrm{kHz}\),接收机带宽则为其四倍,以便更快速地搜索频率。
为确定信号是否被成功截获,必须使用以下公式计算接收机灵敏度:
其中,Sens 为接收机灵敏度(单位:dBm),\(N F\) 为接收机噪声系数(单位:dB),Rqd RFSNR 为预检信号所需信噪比(单位:dB)。
记住,灵敏度是接收机能够接收并完成其任务的最小信号强度。
接收机系统噪声系数为 4 dB,所需 RFSNR 为 15 dB,因此:
由于信号接收水平比接收机系统灵敏度高 10 dB,因此截获接收机具有 \(10-\mathrm{dB}\) 的性能裕度。
6.5.3 空中截获系统¶
在图 6.19 中,截获系统位于一架直升机上,距离敌方发射机 50 km,高度为当地地形以上 \(1,000 \mathrm{~m}\)。目标发射机为手持式 \(400-\mathrm{MHz}\) 发射机,有效辐射功率(ERP)为 1 W,频率为 400 MHz。其鞭状天线底部距离地面 1.5 m。
首先,需要使用上述公式计算截获链路的 Fresnel 区距离:
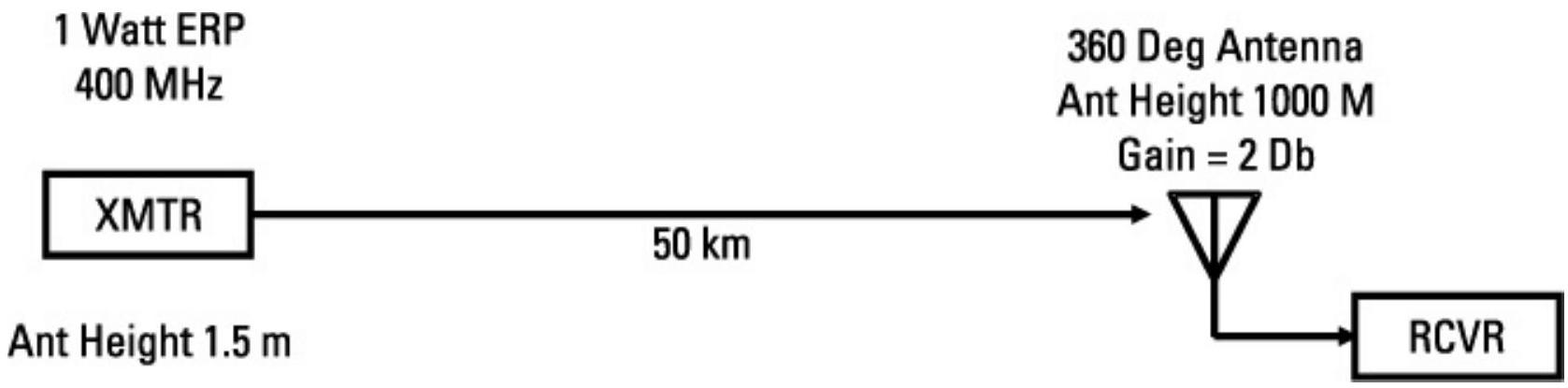
图 6.19 空中截获系统可通过提高接收机高度显著改善传播损耗,从而获得较高性能。
由于传输路径长于 Fresnel 区距离,因此发生双射线传播(two-ray propagation),因此:
截获接收信号强度为:
6.5.4 非视距截获¶
图 6.20 显示了从目标发射机跨越山脊线截获战术通信信号的情况,截获点距离发射机 11 km。在此问题中,发射机到截获接收机的直线距离为 31 km,发射天线高度为 1.5 m,截获天线高度为 30 m。发射信号为 150 MHz、有效辐射功率 1 W,接收天线增益为 12 dBi (\(G_{R}\))。
如第 6.4.7 节所述,链路损耗为 LOS 损耗(忽略地形干扰)加上 KED 损耗因子。如果山脊高于当地地面 210 m(假设地球平坦),则其高于两天线 LOS 路径 200 m。
使用第 6.4.1 节公式计算 LOS 损耗:
注意,这里用大写 D 表示整个链路距离,以免与 KED 损耗中使用的小写 d 混淆。
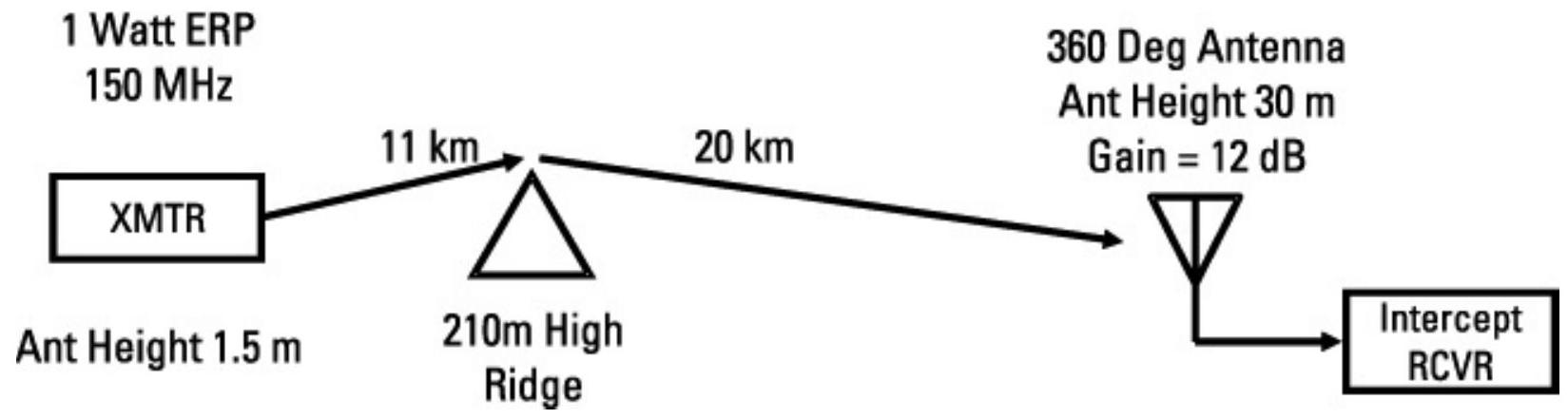
图 6.20 如果截获系统位于目标发射机对面山脊线上,但距离山脊比目标发射机更远,则传播损耗为视距加刀锋衍射因子。
我们将其四舍五入为 106 dB。
为确定 KED 损耗,首先使用公式计算 \(d\):
其中 \(d\) 为输入 KED 损耗计算图的距离值,\(d_{1}\) 为发射机到山脊的距离,\(d_{2}\) 为山脊到接收机的距离。
对于此问题,\(d=[\operatorname{sqrt}(2) / 1.55] \cdot 11 \approx 10\),但也可直接取 \(d=d_{1}\),精度略低。
图 6.21 为第 6.4.7 节中的 KED 损耗计算图,使用本问题的数值绘制。显示当 \(d=10 \mathrm{~km}\),\(H=200 \mathrm{~m}\),\(f=150 \mathrm{MHz}\) 时,KED 损耗为 20 dB。因此,总链路损耗为:
截获接收机的接收功率为:
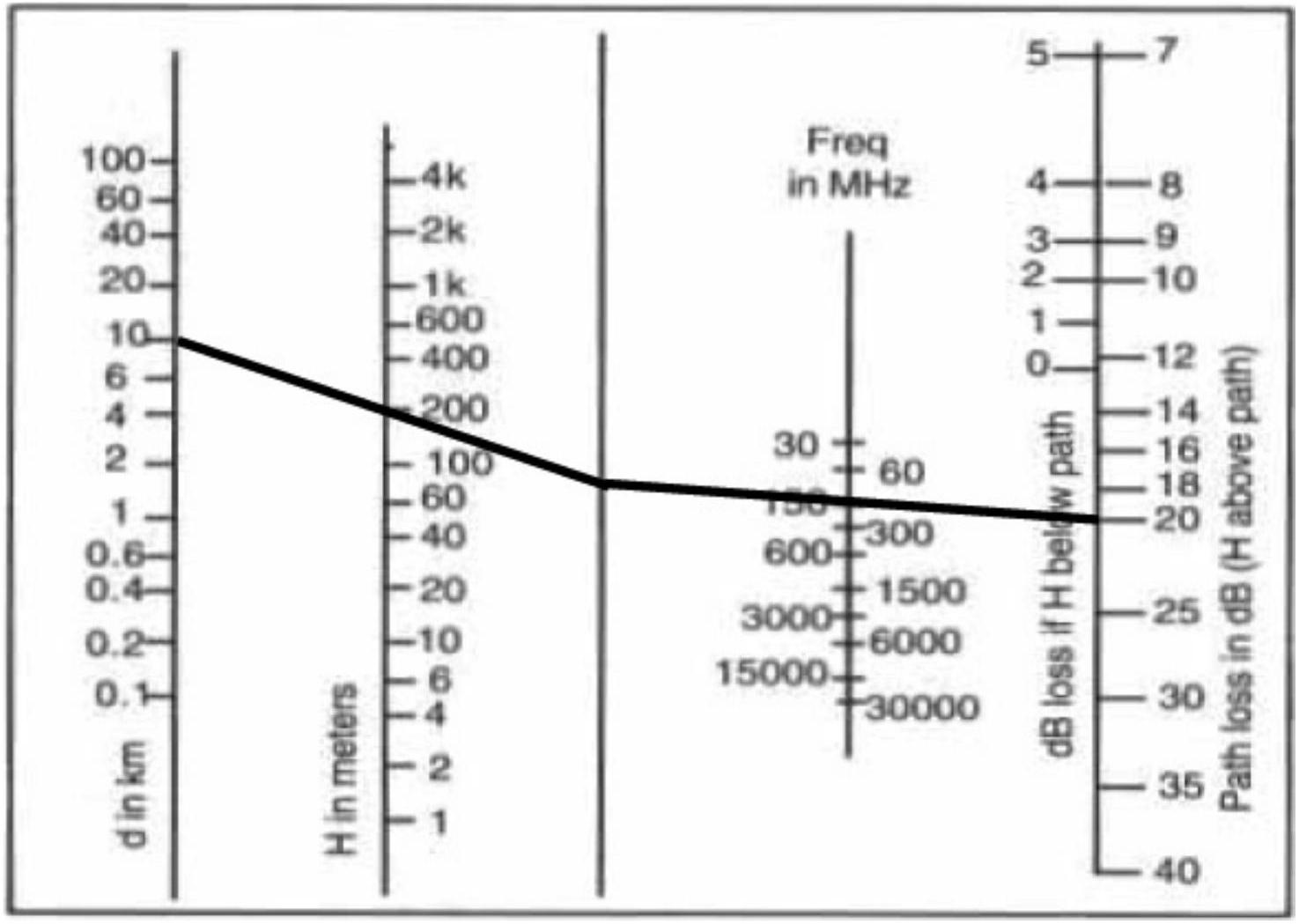
图 6.21 若得出的 \(d\) 为 10 km,山脊高于直射路径 200 m,信号频率为 150 MHz,则刀锋衍射损耗为 20 dB。
6.5.5 强信号环境下的弱信号截获¶
图 6.22 为截获接收系统的框图。系统有效带宽为 25 kHz,接收机噪声系数为 8 dB,前置放大器增益为 20 dB,噪声系数为 3 dB。天线与前置放大器之间有 2 dB 损耗,前置放大器与接收机之间有 10 dB 电路损耗。
该系统必须在存在大量可能在频带内的强信号的情况下接收弱信号(提供 16 dB 预检测信噪比 SNR),因此需要确定其动态范围。
首先,使用第 6.5.2 节讨论的方法计算系统灵敏度。灵敏度是 kTB、系统噪声系数与所需预检测 SNR 的总和。
系统噪声系数由图 6.23 决定。在横坐标上从接收机噪声系数(8 dB)画垂线,在纵坐标上从前置放大器噪声系数 + 前置放大器增益 - 接收机前损耗(13 dB)画水平线,两线交点为退化因子,为 1 dB。系统噪声系数为:前置放大器前损耗 + 前置放大器噪声系数 + 退化因子,即 2 dB + 3 dB + 1 dB = 6 dB。
系统灵敏度为:
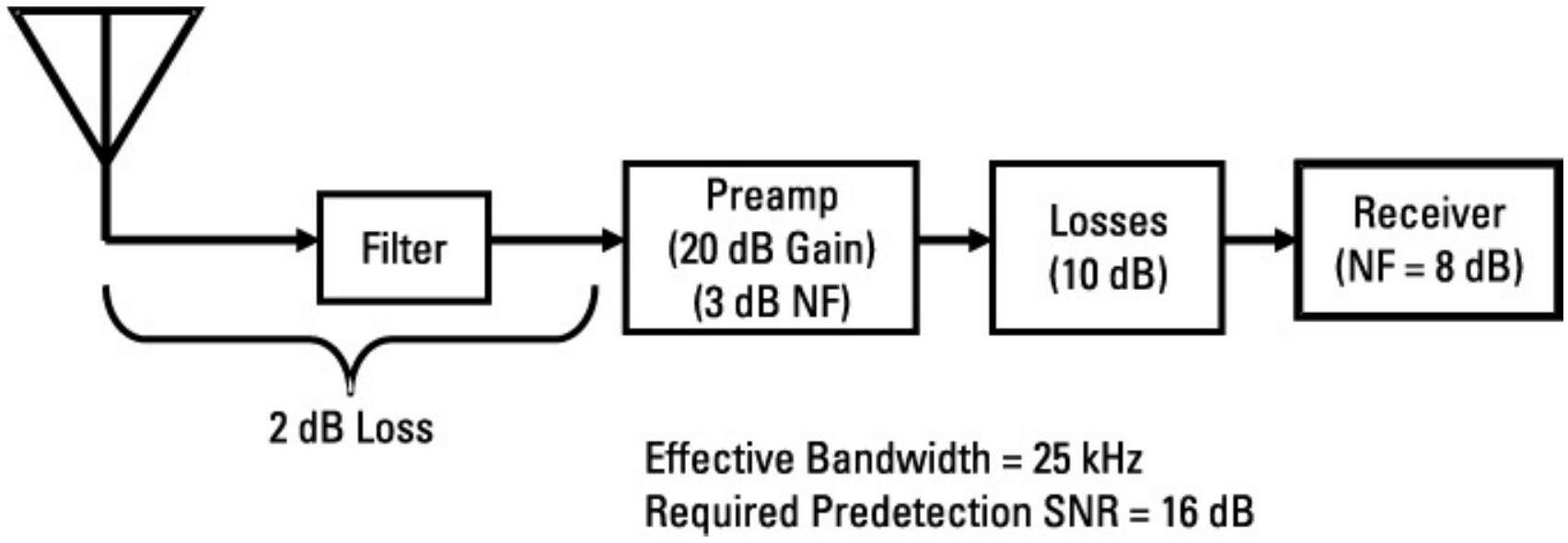
图 6.22 截获系统在前端设有滤波器以防止二阶杂散响应。前置放大器之后有信号分配网络以供给多个接收机。图中仅显示到单个接收机的路径。
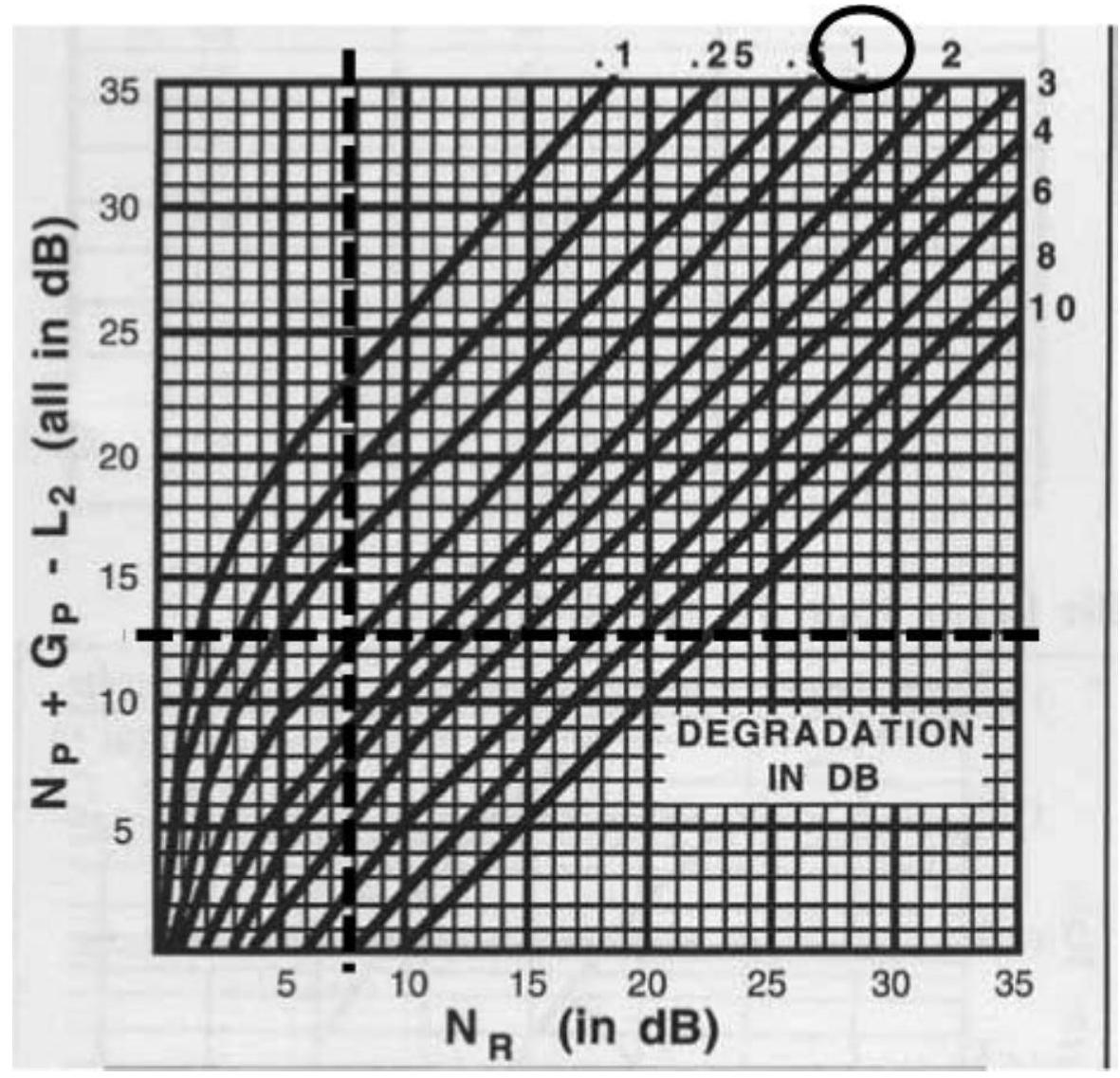
图 6.23 本图显示前置放大器噪声系数的退化为 1 dB。
注意,输入天线的信号为 -108 dBm 时,经过前置放大器输出为 -90 dBm(天线到前置放大器前损耗 2 dB + 前置放大器增益 20 dB)。
系统设计可滤除二阶杂散响应,因此前置放大器的三阶响应决定动态范围。所选前置放大器的三阶截获点为 +20 dBm。
图 6.24 显示用于确定接收系统动态范围的图示。通过前置放大器输出的基准线 +20 dBm,画一条 3:1 斜率线。然后在图上画一条水平线,表示从天线输入灵敏度信号经前置放大器后的输出水平 -90 dBm(-108 dBm - 前置放大器前 2 dB 损耗 + 20 dB 增益)。从三阶杂散线与灵敏度线交点到基准输出线的垂直距离为 70 dB,即接收系统的动态范围为 70 dB。
这意味着系统能够在存在 -38 dBm 强信号的情况下截获 -108 dBm 弱信号。
6.5.6 通信发射机的搜索¶
军事组织不会公开其工作频率,并且会采取极大措施防止敌方获知这些频率。然而,通常情况下,为执行各种电子战(EW)操作,有必要知道敌方的工作频率。因此,频率搜索是一项重要的电子战功能。本节将讨论频率搜索的基本原理,以突出必须权衡的因素。在使用宽带接收机时,这些相同的权衡也是必要的,除非整个感兴趣的频段能够瞬时覆盖。
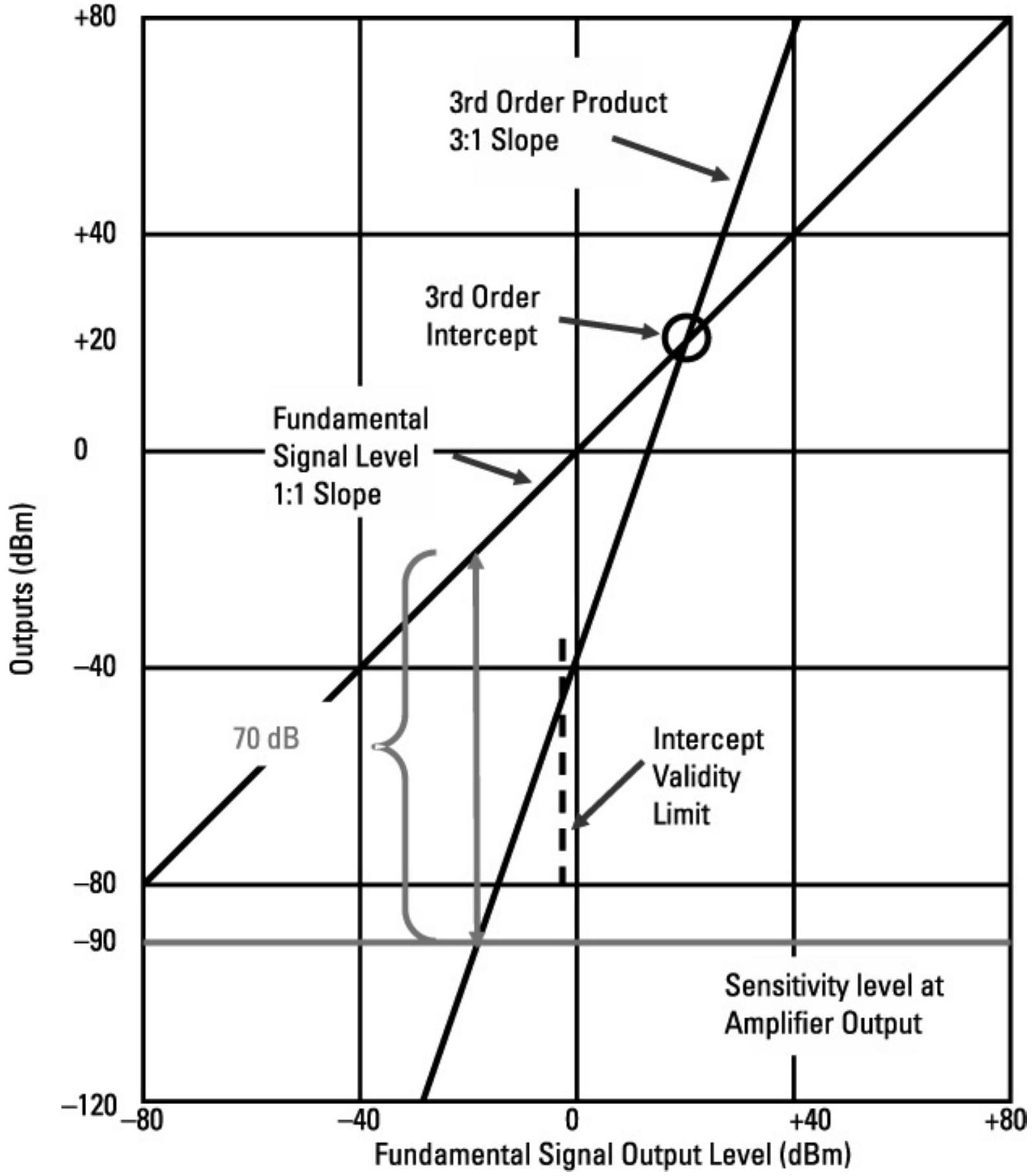
图 6.24 来自 2007 年 3 月 EW101 的图表显示系统动态范围为 70 dB。
6.5.7 关于战场通信环境¶
现代战争几乎要求所有作战资源高度机动,因此极度依赖无线通信。这包括大量语音和数据链路。战术通信环境通常被描述为信道占用率为 \(10\%\)。这有些误导,因为它指的是在任意微秒内,预计只有 \(10\%\) 的可用射频信道是活跃的。如果在每个信道停留几秒钟,实际占用率会高得多,更接近 \(100\%\)。这意味着在搜索特定发射机时,必须在大量非目标发射机中找到目标。
6.5.8 一种有用的搜索工具¶
图 6.25 显示了一种常用工具,用于帮助开发或评估频率搜索方法。它是一个频率与时间的图表,可用于绘制目标信号的特性以及一个或多个接收机的时间与频率覆盖情况。频率刻度应覆盖整个感兴趣的频段(或该频段的一部分),时间刻度应足够长以显示搜索策略。信号图示显示每个信号的带宽与信号预期持续时间。如果信号是周期性的或以某种可预测方式改变频率,这些特性也可以在图上显示。接收机显示调谐到特定频率,其带宽及覆盖该频率增量的时间。
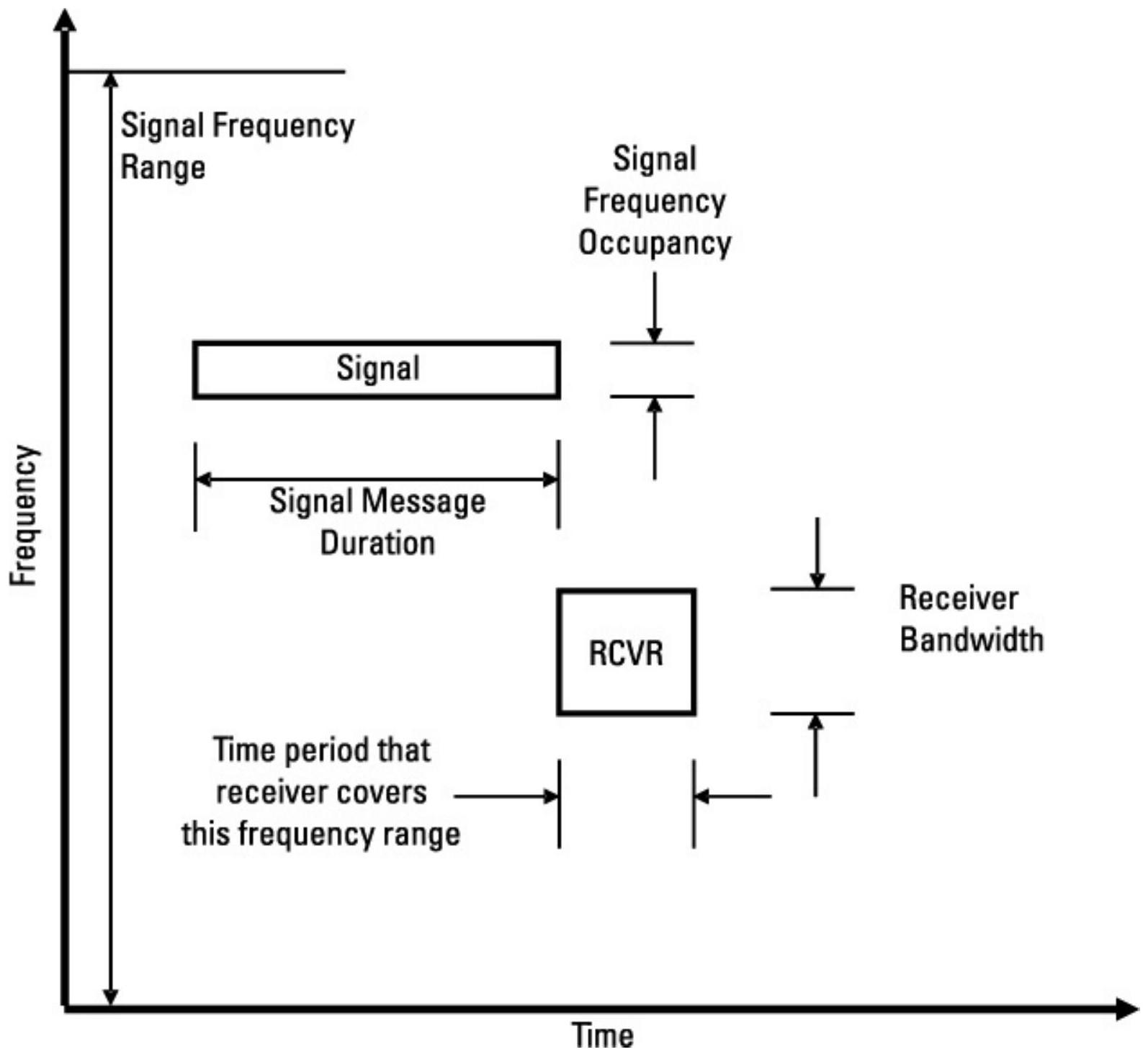
图 6.25 频率与时间的图表显示接收机与目标信号,是一种有用的搜索分析工具。
图 6.26 显示了典型的扫描接收机策略。平行四边形显示扫描接收机在频率与时间上的覆盖情况。接收机带宽是平行四边形在任意频率处的高度,斜率表示接收机的调谐速率。注意,信号 A 被最佳接收(整个带宽和整个持续时间)。信号 B 被接收,如果不需要覆盖其整个带宽;信号 C 被接收,如果不需要覆盖其整个持续时间。可以根据信号的特性和搜索目的设置规则。
6.5.9 技术问题¶
多年前,军事截获接收机是机械调谐的,因此必须通过手动调谐或在整个覆盖频段上进行一次大致线性的自动扫描来搜索信号。这种方法通常被称为“垃圾收集”,因为你需要查看环境中的每一个信号,然后从通常大量的非目标信号中挑选出少量感兴趣的信号。识别感兴趣信号需要经过训练的操作员进行相当复杂的分析。请记住,50 年前的计算机是满屋子的电子管,需要大量强制空气冷却,其能力与现代计算机相比微不足道。
随着数字调谐接收机和拥有大容量内存及极高速度的一体机(最终发展到单芯片计算机)的出现,更加高效的搜索方法变得可行。现在,你可以存储已知感兴趣信号的频率,并在寻找新信号之前自动检查每一个已知频率。对每一个潜在感兴趣信号可以执行快速傅里叶变换(FFT),以实现计算机化的频谱分析。然后可根据频谱分析结果做出“感兴趣/不感兴趣”的判断;如果系统具有方向测定或发射源定位能力,还可以快速查看发射源的大致位置以辅助判断。
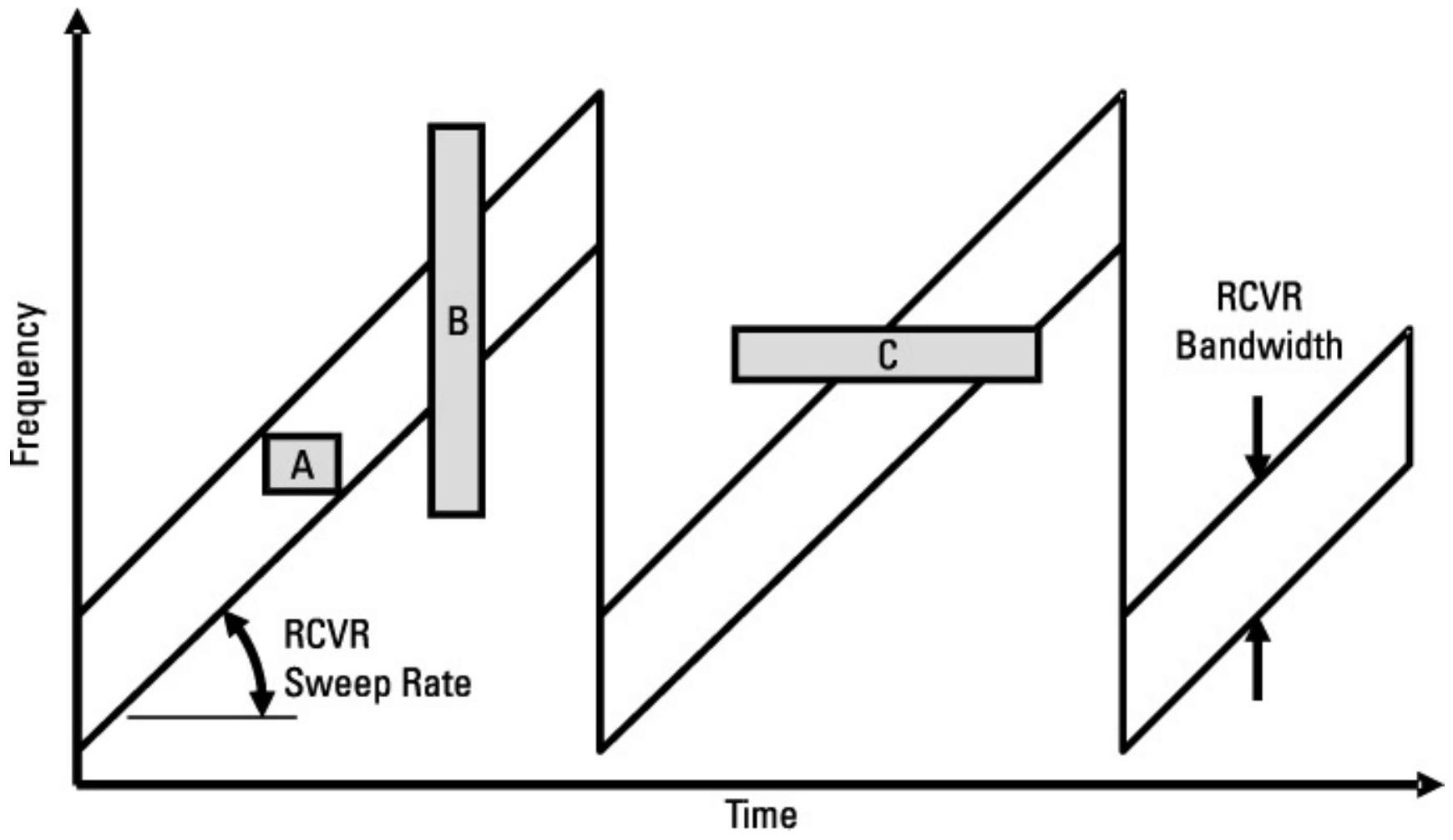
图 6.26 接收机搜索计划和感兴趣目标有助于分析截获概率。
6.5.10 数字调谐接收机¶
图 6.27 显示了数字调谐超外差接收机。数字调谐接收机具有合成器本振和电子调谐前置选择器,可以在调谐范围内非常快速地选择任意信号频率。调谐可以由操作员或计算机控制。
图 6.28 显示了锁相环(PLL)合成器的方框图。注意,电压控制振荡器(VCO)被锁相到精确稳定的晶体振荡器频率的倍数。这意味着数字调谐接收机的调谐是精确且可重复的,使上述搜索方法可行。合成器反馈环的带宽设置在低噪声输出(即窄环带宽)与高调谐速度(即宽环带宽)之间的最佳折中。在搜索模式下,必须留出时间让合成器稳定,然后才能开始分析所选瞬时接收带宽内的任何信号。
当数字调谐接收机用于搜索模式时,它会调谐到离散频率,如图 6.29 所示。搜索不需要线性扫描整个感兴趣频段,而可以以任意顺序检查特定频率或扫描高优先级的频段。通常建议提供 50% 的接收机调谐步进重叠,以防止信号位于频段边缘被漏掉。然而,50% 的重叠意味着覆盖整个信号范围所需时间翻倍。重叠量是一个权衡,需要在具体情况下优化搜索。
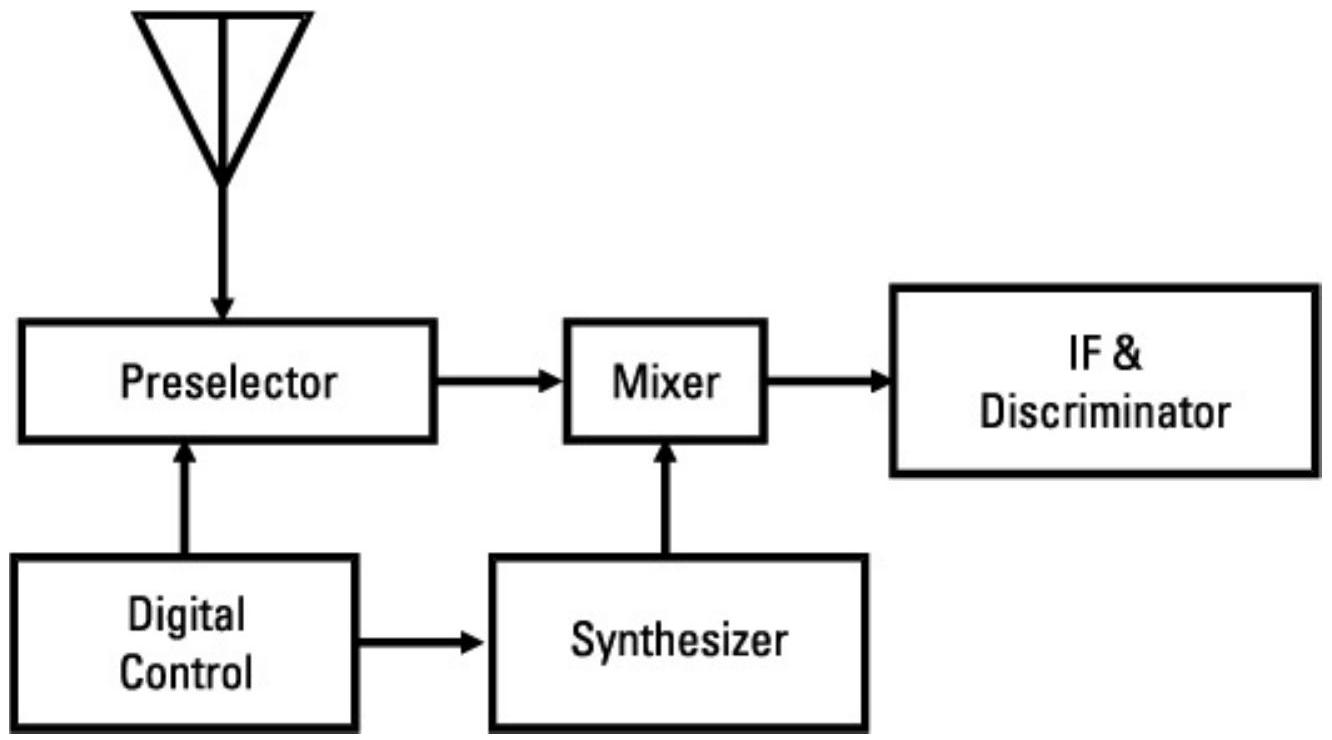
图 6.27 数字调谐接收机可以在任意时间快速调谐到频段的任意部分。
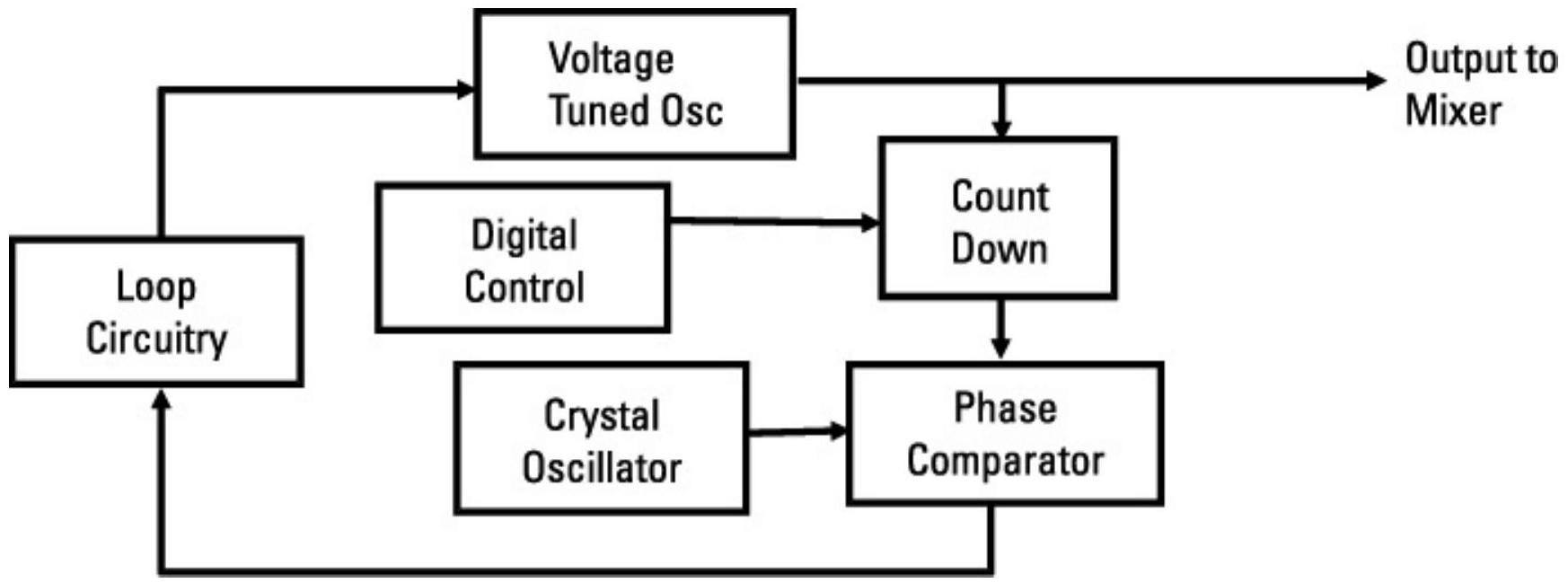
图 6.28 锁相环合成器将电压控制振荡器调谐到频率,使分频信号与晶体振荡器同步。分频比由数字选择以确定合成器输出频率。
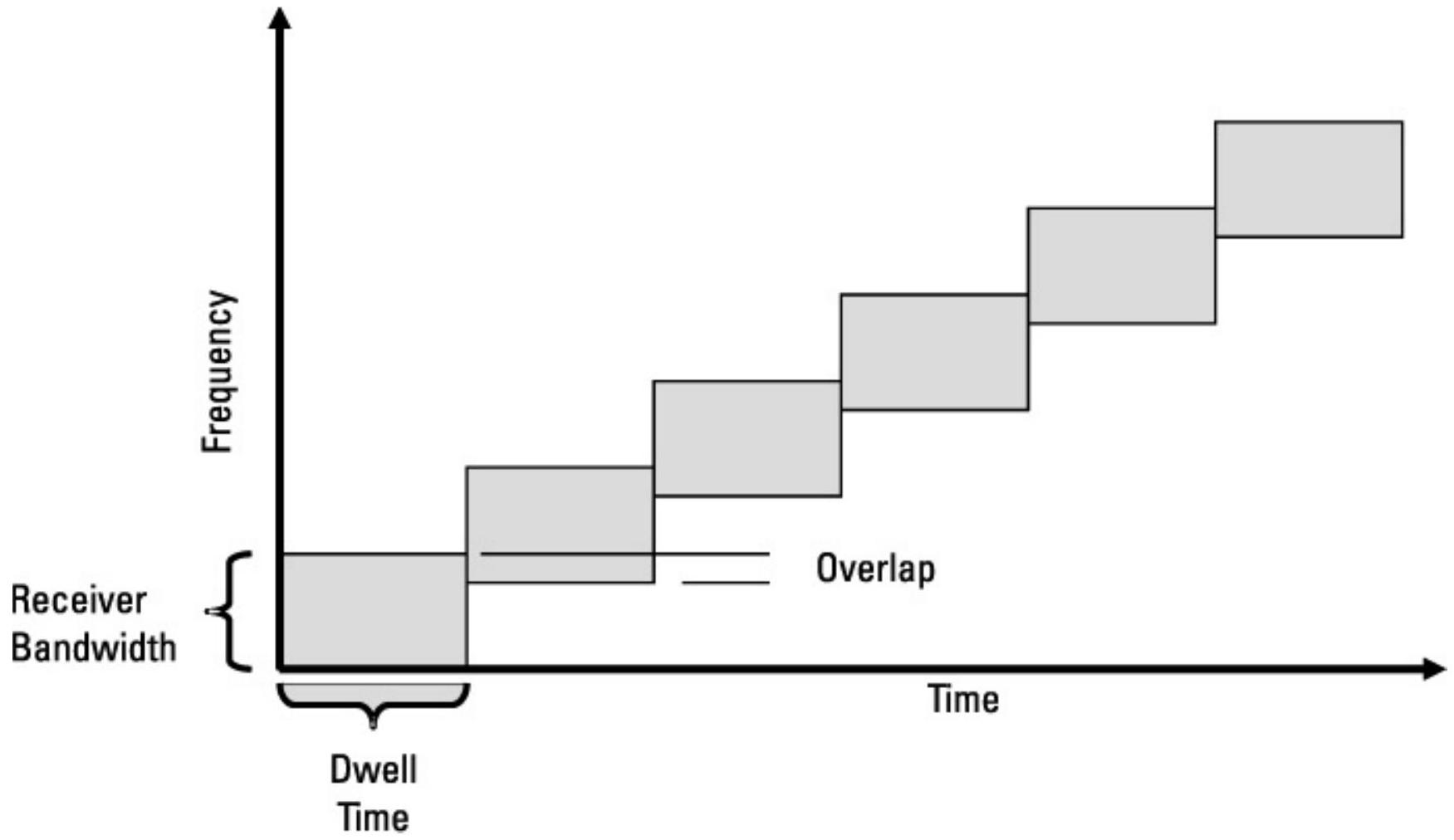
图 6.29 数字调谐接收机调谐到离散频率。
如图 6.30 所示,截获系统通常使用多个监视接收机,由一个专用搜索接收机控制。当搜索接收机检测到信号时,会快速分析该信号,以判断其是否为感兴趣且优先级足够高的信号,从而分配给某个监视接收机。如果是,监视接收机会调谐到该信号频率,并相应设置其工作参数(例如解调方式)。每个监视接收机的输出可以传送到操作员位置,或送入自动记录或内容分析系统。

图 6.30 搜索接收机可以用于确定感兴趣信号的频率,从而使监视接收机快速调谐到最高优先级信号。搜索接收机可以是宽带接收机类型,也可以是优化扫描的窄带接收机。
6.5.11 实际搜索考虑因素¶
理论上,接收机可以以足够快的速率扫描,使得信号在接收机带宽内停留的时间等于带宽的倒数(例如,在 1 MHz 带宽下为 \(1 \mu s\))。然而,系统软件需要时间来判断信号是否存在,这可能需要 100 到 200 \(\mu \mathrm{s}\),远大于 1/带宽的时间。
对每个存在的信号进行处理(例如调制分析或发射源定位)通常需要更长时间才能确定该信号是否为感兴趣信号。这类处理每个发现的信号可能需要一毫秒甚至更多。请记住,在可用信道的 \(10\%\) 可能存在信号。例如,在 30 到 88 MHz 频段中,有 2,320 个 25 kHz 信道,因此在全频带搜索中,你预计会找到 232 个占用信道。
6.5.12 窄带搜索示例¶
这里给出一个窄带搜索示例。我们希望寻找一个带宽为 25 kHz、频率范围在 30 到 88 MHz 之间的通信信号。假设该信号持续 0.5 秒。注意,这么短的信号很可能是按键点击信号,这曾是截获系统需要关注的最短信号。在本示例中,时间将四舍五入到最近的毫秒。
我们的接收天线覆盖方位角 \(360^\circ\),搜索接收机带宽为 25 kHz。接收机必须在每个调谐步停留的时间等于带宽的倒数。为了避免频段边缘截获,我们将调谐步重叠 50%。
图 6.31 以图示形式展示了搜索问题(参见第 6.5.8 节讨论的图示方法)。注意接收覆盖的重叠,这导致每次调谐步的频率仅变化 12.5 kHz。
为了以 100% 的概率找到感兴趣信号,接收机必须在 0.5 秒内覆盖整个 58 MHz 频段。覆盖信号范围所需的带宽数为:
在 50% 重叠下,58 MHz 频段需要 4,640 个调谐步。每步停留 40 μs,总共需要 186 ms。
这意味着接收机可以在假设的最短信号持续时间的一半内找到感兴趣信号,因此 100% 的截获概率轻松实现。
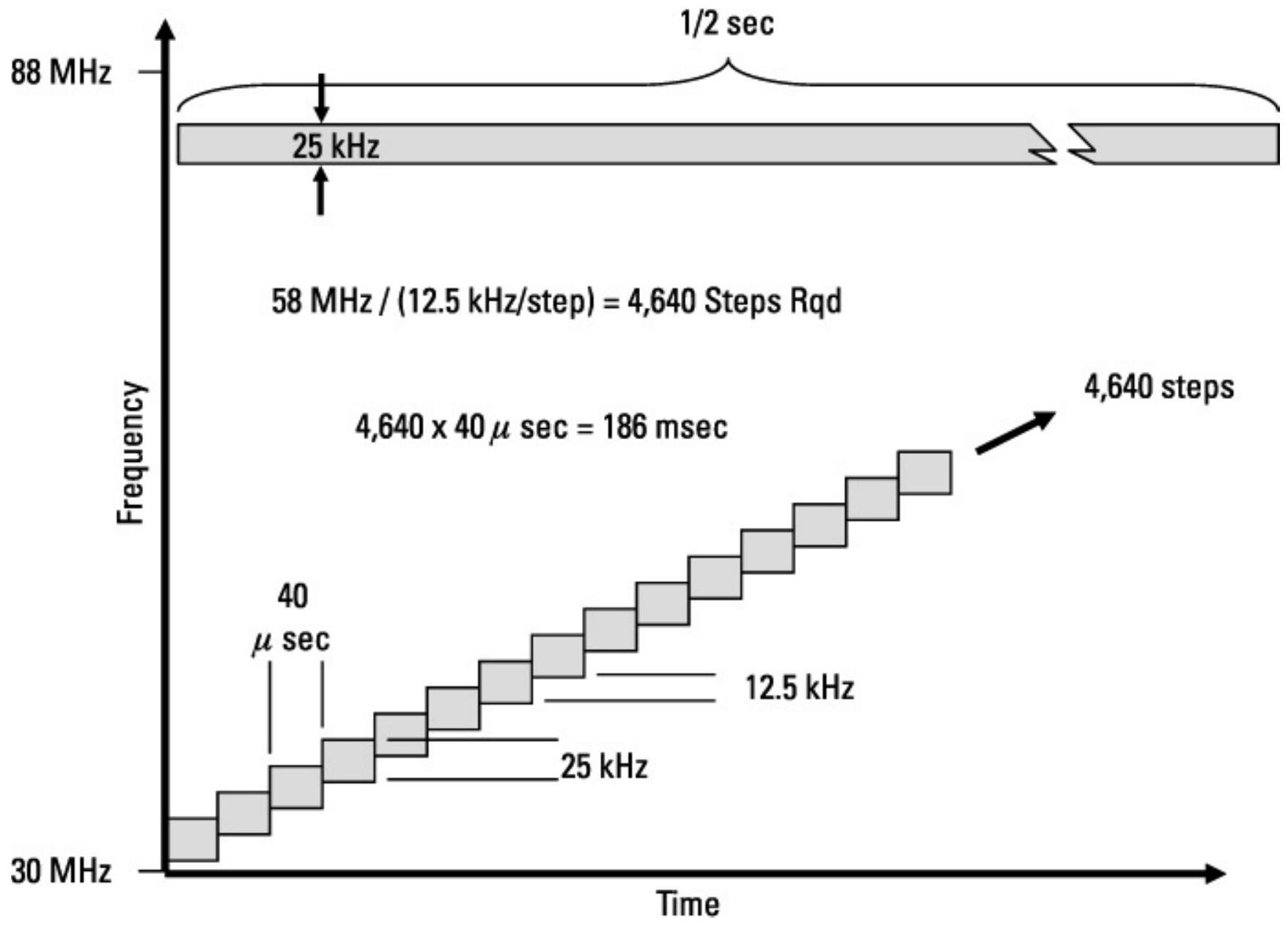
图 6.31 25 kHz 搜索带宽、50% 重叠和每步 40 μs 停留时间可在 186 ms 内覆盖 58 MHz。
然而,这假设我们拥有最优搜索且信号会立即被识别为感兴趣信号。为了增加问题的复杂性,假设我们有一个处理器可以在 200 μs 内识别信号的调制方式。这意味着我们必须在每个频率停留该停留时间,因此覆盖 58 MHz 搜索范围需要 928 ms。
搜索未能在指定的 0.5 秒内找到信号,如图 6.32 所示。
6.5.13 增加接收机带宽¶
如果将搜索接收机带宽增加到 150 kHz(覆盖六个目标信号信道),并假设 200 μs 的处理时间也允许确定信号在该带宽内的频率,则搜索效率将得到提升(见图 6.33)。现在覆盖目标频段仅需 773 个步骤。

图 6.32 25 kHz 搜索带宽、50% 重叠和每步 200 μs 停留时间可在 928 ms 内覆盖 58 MHz。
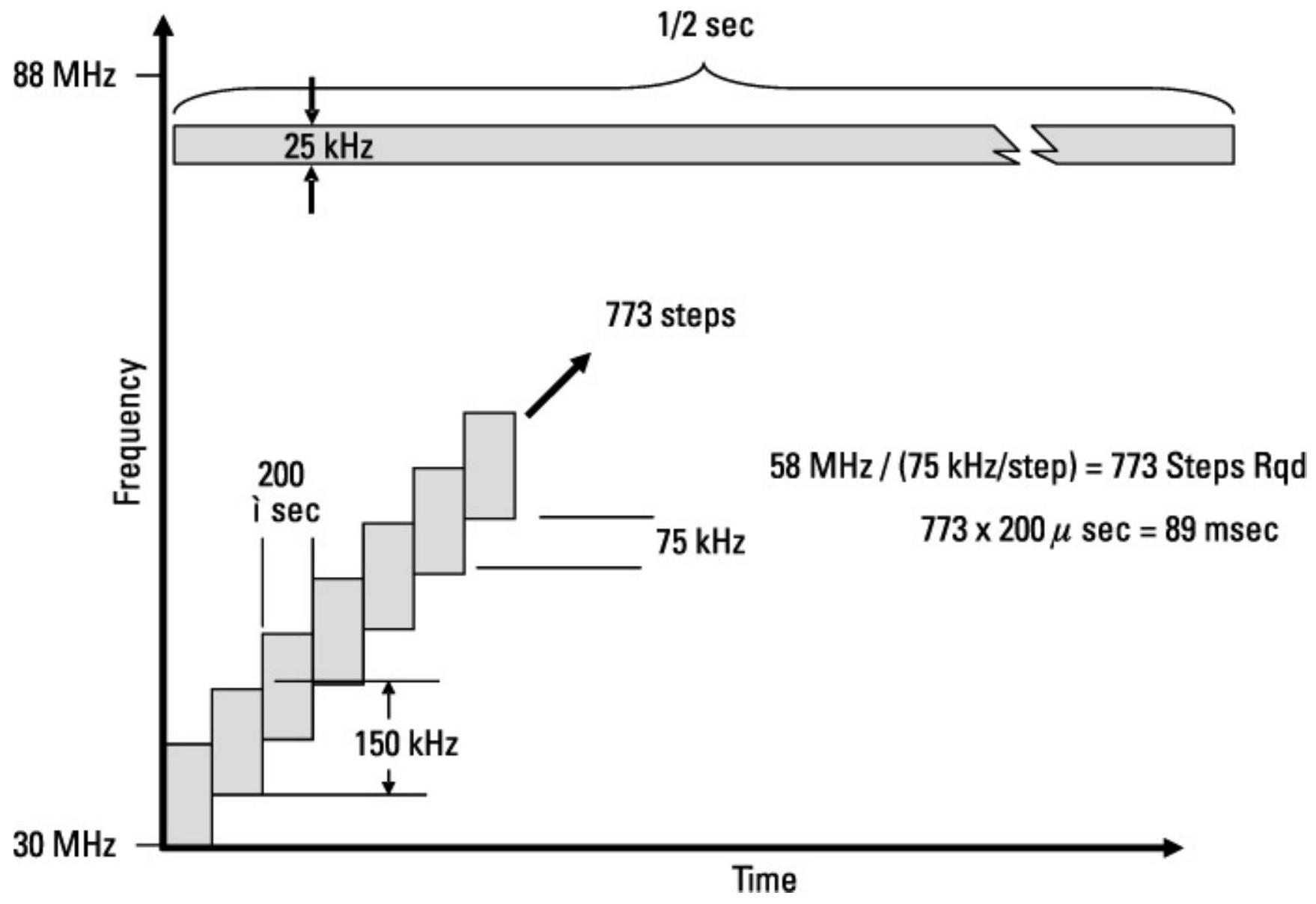
图 6.33 150 kHz 搜索带宽、50% 重叠和每步 200 μs 停留时间可在 89 ms 内覆盖 58 MHz。
以每步 200 μs 的接收机调谐时间,覆盖 2,320 个信道(50% 重叠)仅需 155 ms。见图 6.33。
请注意,这种带宽增加会使接收机灵敏度下降近 8 dB。如果接收机带宽进一步增大,带宽内出现多个信号的概率增加,将成为问题。
6.5.14 添加方向测量器¶
为了使问题更有趣,假设我们的接收机是方向测量系统的一部分,并且必须确定目标信号的到达方向 (DOA)。我们的方向测量器需要 1 ms 来确定 DOA。如果没有其他信号存在,这仅增加 1 ms 的搜索时间。
我们已经讨论了战术通信环境的信号密度,并考虑到在战术系统评估中常用的数字为 10% 信道占用率。这意味着在 58 MHz 的关注频段中,预计将包含:
在 150 kHz 搜索带宽和 50% 重叠下,接收机可以在 139 ms 内覆盖 2,088 个空信道。
然而,232 个占用信道将额外需要 232 ms。因此,我们的搜索总时间为 371 ms(139 + 232),因此搜索策略可以以 100% 的概率找到目标信号并确定其 DOA。
注意,在第 7 章讨论频率跳变信号搜索时,我们将回到这个问题。
6.5.15 使用数字接收机进行搜索¶
这里,我们仅考虑使用 FFT 信道化器寻找我们的目标信号(30 至 88 MHz 之间)。我们将受限于接收机使用标准 VME(虚拟机环境)总线格式,这将把数据速率限制在 40 MBps。为了满足奈奎斯特采样率,我们将输入频段限制在 20 MHz。
图 6.34 显示了数字接收机的框图。使用 FFT,我们将在三个步骤中覆盖整个目标频率搜索范围,如图 6.35 所示。
6.6 通信发射机定位¶
EW 系统的一个最重要要求是定位威胁发射机。通信发射机尤其具有挑战性,因为其工作频率相对较低。较低的频率意味着较大的波长,因此需要较大的天线孔径。一般而言,通信电子支援(ES)系统需要提供即时的 \(360^{\circ}\) 角度覆盖,并具备足够灵敏度以定位远距离发射机。它们通常必须能够接收所有通信调制方式,包括与低可截获概率(LPI)传输相关的调制方式(将在第 7 章讨论)。在所有情况下,通信 ES 系统处理的是非合作(即敌对)发射机。因此,可用于合作系统定位的技术在定义上不可用。
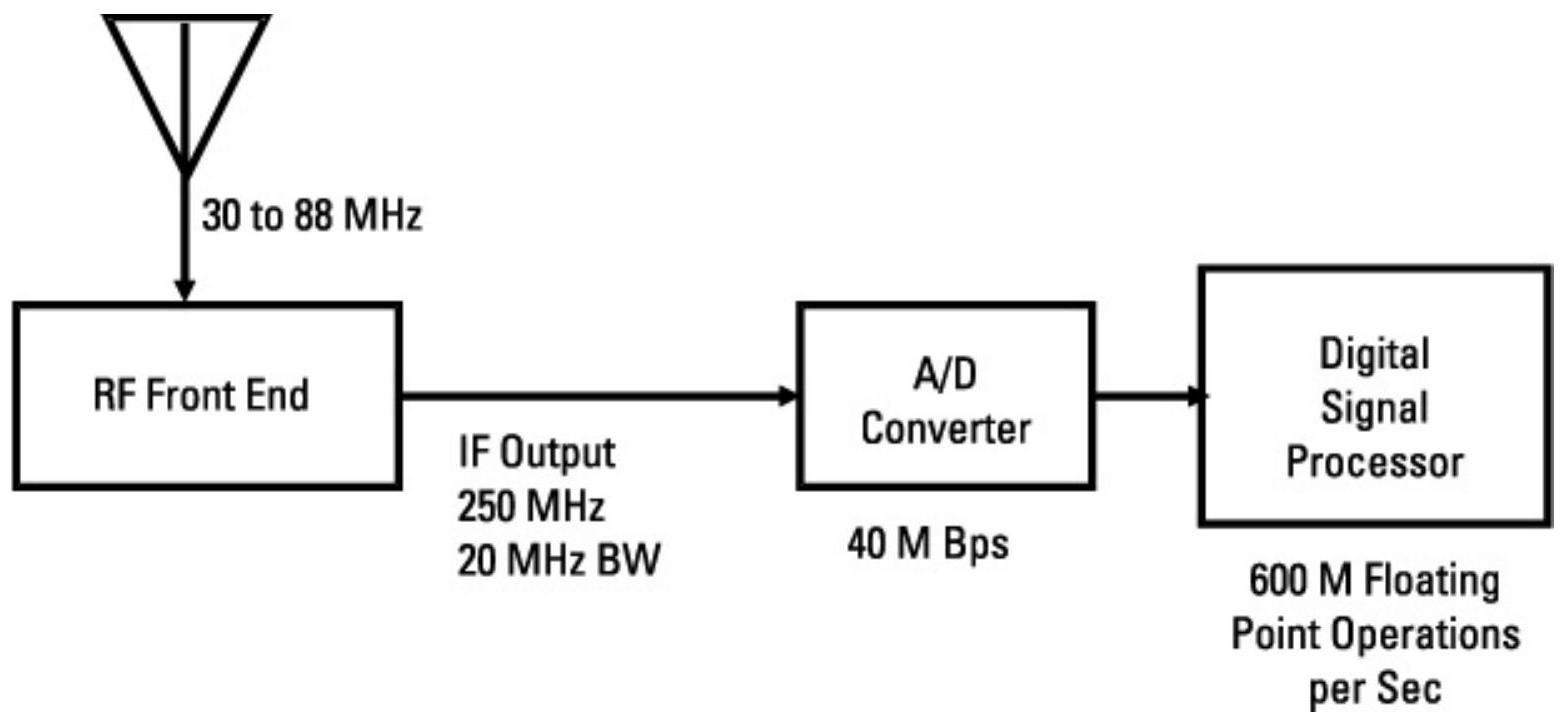
图 6.34 数字调谐接收机可以快速调谐到频段的任意部分。

图 6.35 数字调谐接收机移动到离散的频率分配。
本节将讨论常用方法和最重要的技术。我们首先讨论普通(即非 LPI)发射机的定位,然后在第 7 章中讨论 LPI 发射机的定位。在讨论所有系统应用时,现代军事环境中预期的高信号密度将是一个重要考虑因素。
6.6.1 三角定位法¶
三角定位法是定位非合作通信发射机最常用的方法。如图 6.36 所示,这涉及在不同位置使用两个或多个接收系统。每个系统必须能够确定目标信号的到达方位(DOA),同时必须具备建立角度参考的方式,通常为真北。为了方便起见,以下讨论中我们将这些系统称为方向探测(DF)系统。
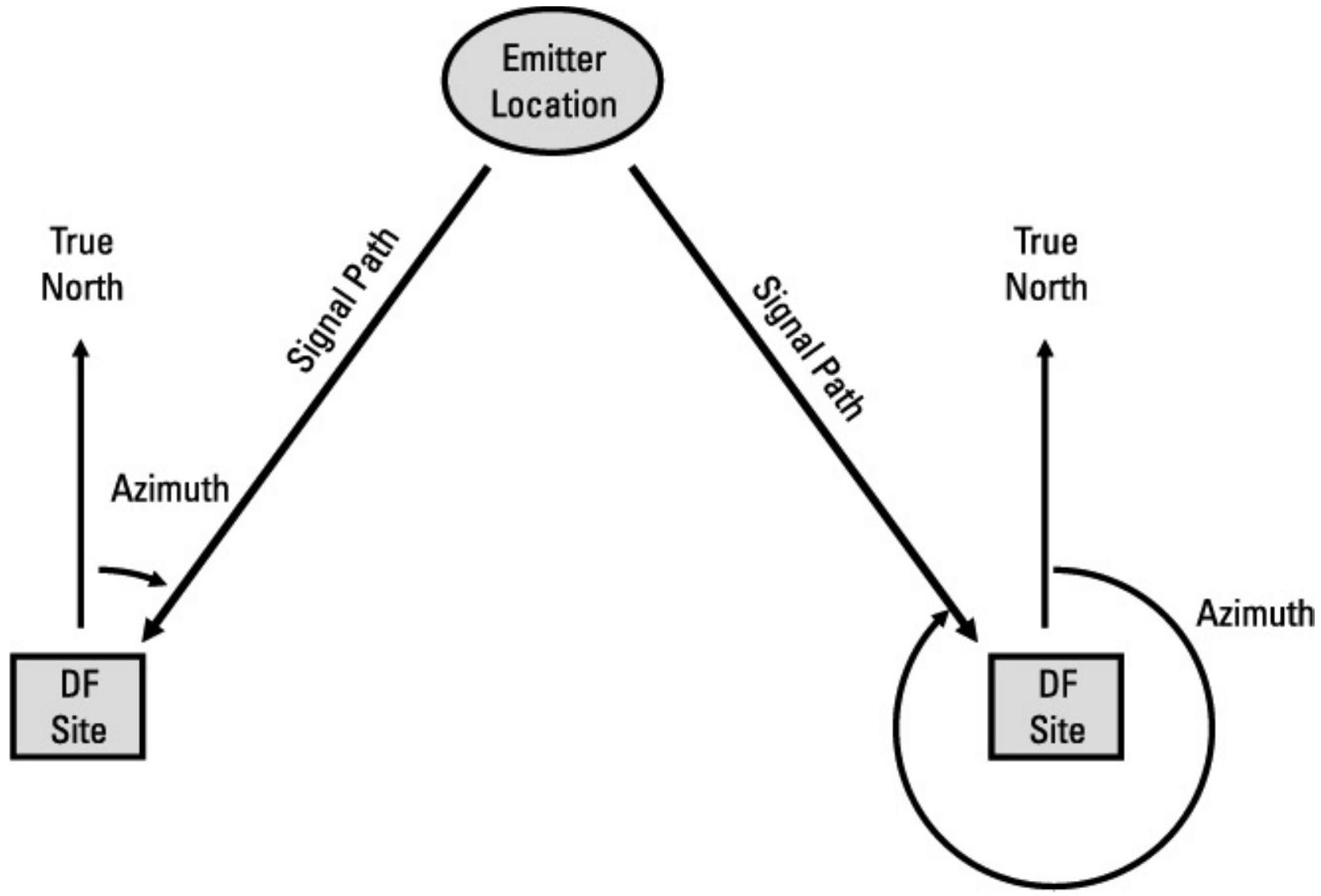
图 6.36 三角定位法通过确定信号在多个已知站点的到达方位来定位发射机。
由于地形遮挡或其他情况可能导致两个 DF 系统接收到不同信号(在典型的高密度信号环境中),通常使用三个或更多 DF 系统进行三角定位。如图 6.37 所示,来自三个 DF 系统的 DOA 向量将形成一个三角形。理想情况下,这三个向量应在发射机位置交汇,如果三角形足够小,可以将三个交点的坐标平均以计算报告的发射机位置。
这些 DF 站点通常彼此距离较远,因此 DOA 信息必须传送到单一分析位置,才能计算发射机位置。这也意味着每个 DF 站点的位置必须已知。
重要的是,每个 DF 站点必须能够接收目标信号。如果 DF 系统安装在飞行平台上,通常预计其与目标发射机之间具有视距(LOS)。地面系统在地形允许 LOS 的情况下可提供更准确的定位,但应能够以可接受精度确定地平线以外发射机的位置。
注意,三角定位法的最优几何条件是从发射机位置看,两个 DF 站点之间的角度为 \(90^{\circ}\)。
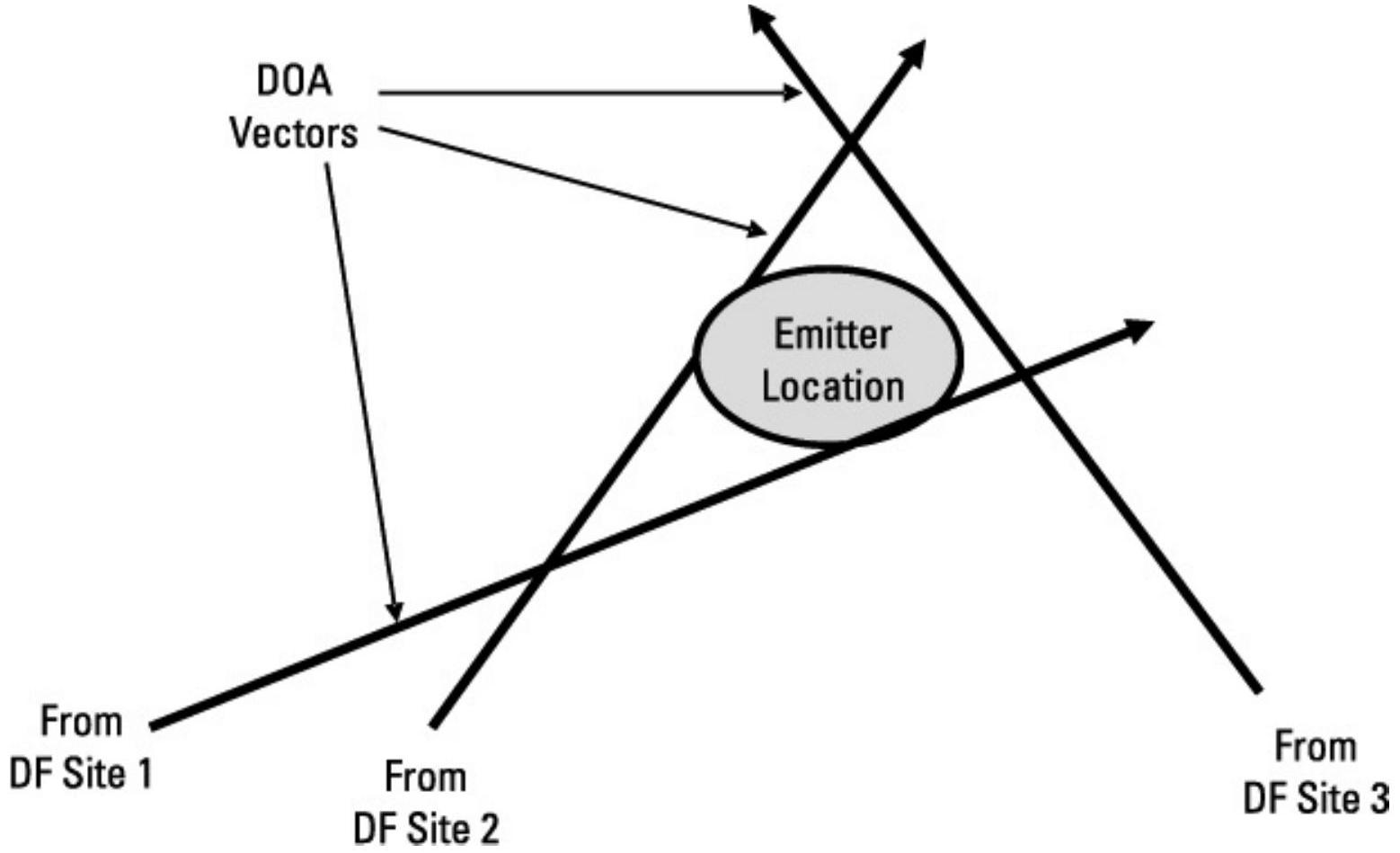
图 6.37 三角定位通常由三个站点完成,使三个到达方向向量形成一个三角形。三角形越小,发射机定位精度越高。
三角定位也可以由单个移动的 DF 系统完成,如图 6.38 所示。这通常仅适用于空中平台。方位线仍应在目标处交叉成 \(90^{\circ}\)。因此,DF 系统所安装平台的速度以及飞行路径与目标之间的距离将决定实现准确发射机定位所需的时间。
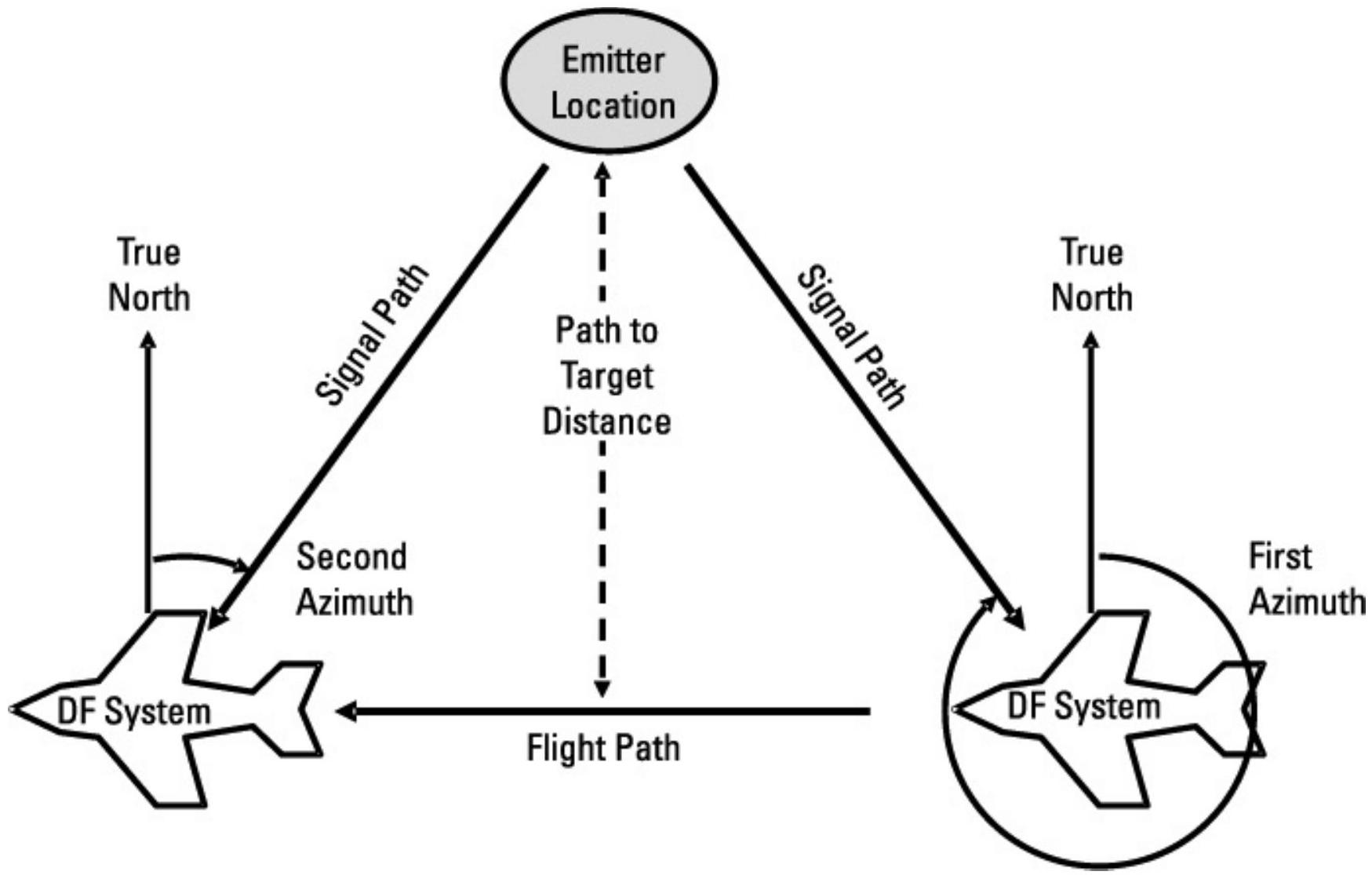
图 6.38 移动 DF 系统可以通过沿飞行路径在不同时间获取的方位角执行三角定位。
例如,如果 DF 平台以 100 节的速度飞行,并经过距离目标发射机约 30 km 的位置,将需要近 10 分钟才能达到最优定位几何。这对固定发射机可能相当实用,但对于移动发射机而言可能过慢。要使此方法达到可接受的精度,目标发射机在数据采集期间的移动量不得超过所需的定位精度。注意,接受低于最优几何条件(因此定位精度降低)可能会提供最佳的作战性能。
6.6.2 单站定位¶
在某些情况下,可以通过单个发射机定位站测得的方位角和距离来确定敌方发射机的位置。一种情况适用于处理低于约 30 MHz 信号的地面系统,另一种情况适用于空中系统。
低于约 30 MHz 的信号可以通过单站定位器(SSL)进行定位,如图 6.39 所示。这些信号会被电离层折射。由于它们以如图 6.40 所示的反向角度返回,因此通常说信号被电离层反射。如果测量到达发射机定位站的信号的方位角和仰角,就可以定位发射机。距离是根据仰角和电离层反射点的高度计算的,因为来自电离层的反射角与入射角相同。该过程中最困难的部分是准确描述反射点的电离层。通常,距离计算的精度明显低于方位角测量,导致定位概率呈延长区域。

图 6.39 对于低于约 30 MHz 的发射机,可以通过测量单个 DF 站的方位角和仰角来确定其位置。

图 6.40 低于约 30 MHz 的信号似乎被电离层反射。
如果空中发射机定位系统测量地面非合作发射机的方位角和仰角,则可以按图 6.41 所示计算发射机位置。距离测定需要飞行器知道其在地面的位置信息和高度,并且必须拥有当地地形的数字地图。到发射机的地表距离是从飞行器下方点到信号路径向量与地面交点的距离。
6.6.3 其他定位方法¶
精确发射机定位方法(后文将详细描述)使用在两个远程站接收到的目标信号参数进行比较,从而计算可能的发射机位置数学曲线,如图 6.42 所示。这些技术可以使发射机非常接近该曲线,但该曲线通常延伸数公里。通过添加第三个站点,可以计算第二条和第三条曲线。这三条曲线在发射机位置处交叉。
6.6.4 均方根误差(RMS Error)¶
DOA 测量系统的精度通常以均方根(RMS)误差表示。这被认为是 DF 系统的有效精度。这并不定义可能存在的峰值误差。即使存在少量较大的峰值误差,系统的 RMS 误差仍可能相对较小。在定义 DF 系统的 RMS 误差时,假设误差是由随机变化的条件引起的,例如噪声。有些系统存在已知的大系统误差,这是由于系统实现方式造成的。当这些少量大误差与许多较小误差平均时,会得到可接受的 RMS 误差。然而,在某些可预测条件下,误差可能达到 RMS 误差值的数倍,从而降低发射机定位的操作可靠性。如果在处理过程中纠正了这种已知的峰值误差,则可获得合适的 RMS 误差规范。
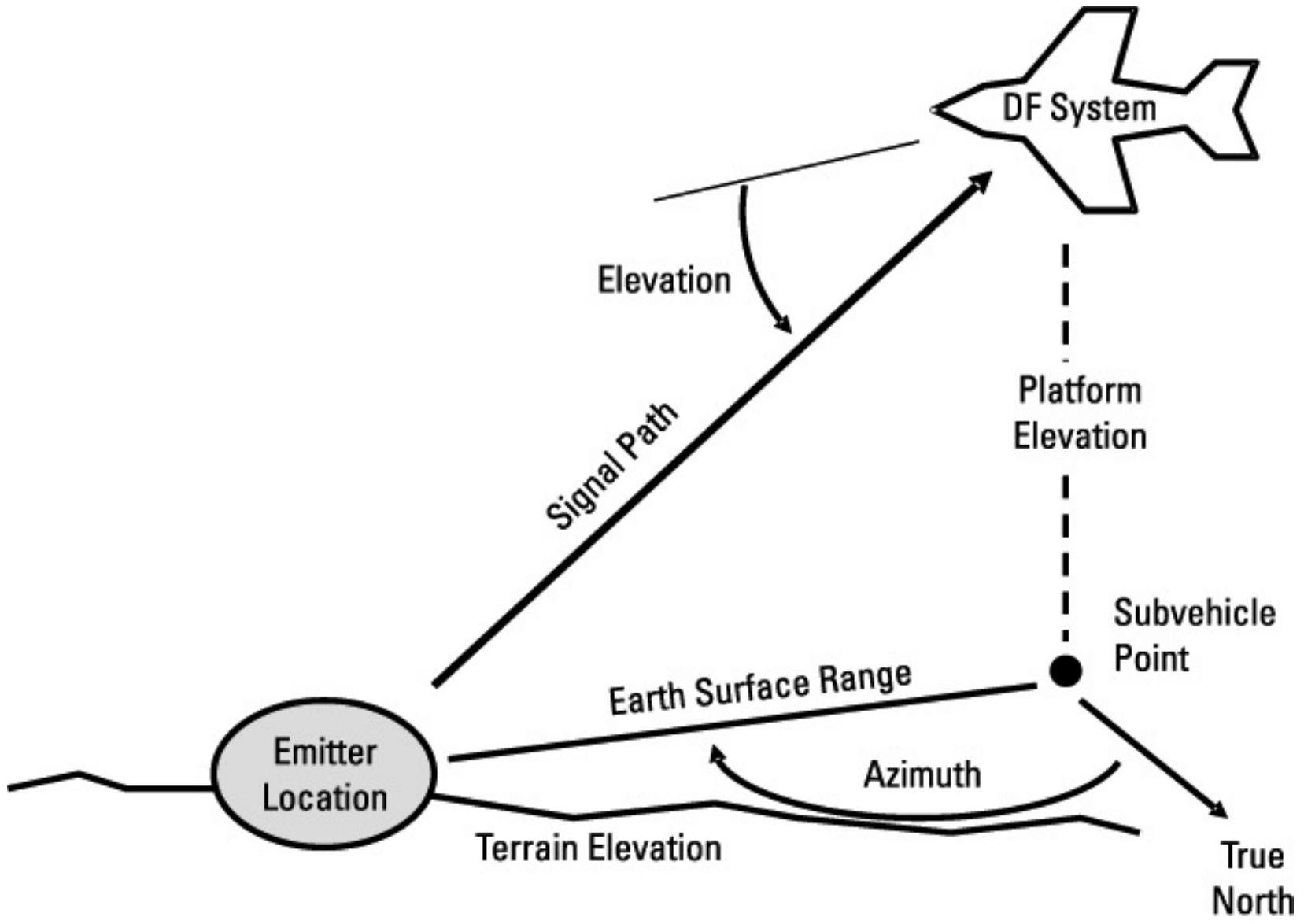
图 6.41 空中 DF 系统通过测量方位角和仰角可以定位地面发射机。
为了确定 RMS 误差,需要在相对均匀分布的频率和到达角下进行大量 DF 测量。对于每个数据采集点,必须知道真实的到达角。在地面系统中,这通常通过在校准转盘上安装 DF 系统,或使用独立跟踪器以远高于 DF 系统指定精度(理想情况下高一个数量级)的精度测量测试发射机的真实角度来实现。在空中 DF 系统中,真实到达角通过已知测试发射机位置以及空中平台的惯性导航系统(INS)提供的位置和姿态计算得出。
每次 DF 系统测量 DOA 时,将其与真实到达角相减。然后对该误差进行平方处理。将平方误差取平均后开平方,即得到系统的 RMS 误差。RMS 误差可以分解为两个组成部分,如下所示:
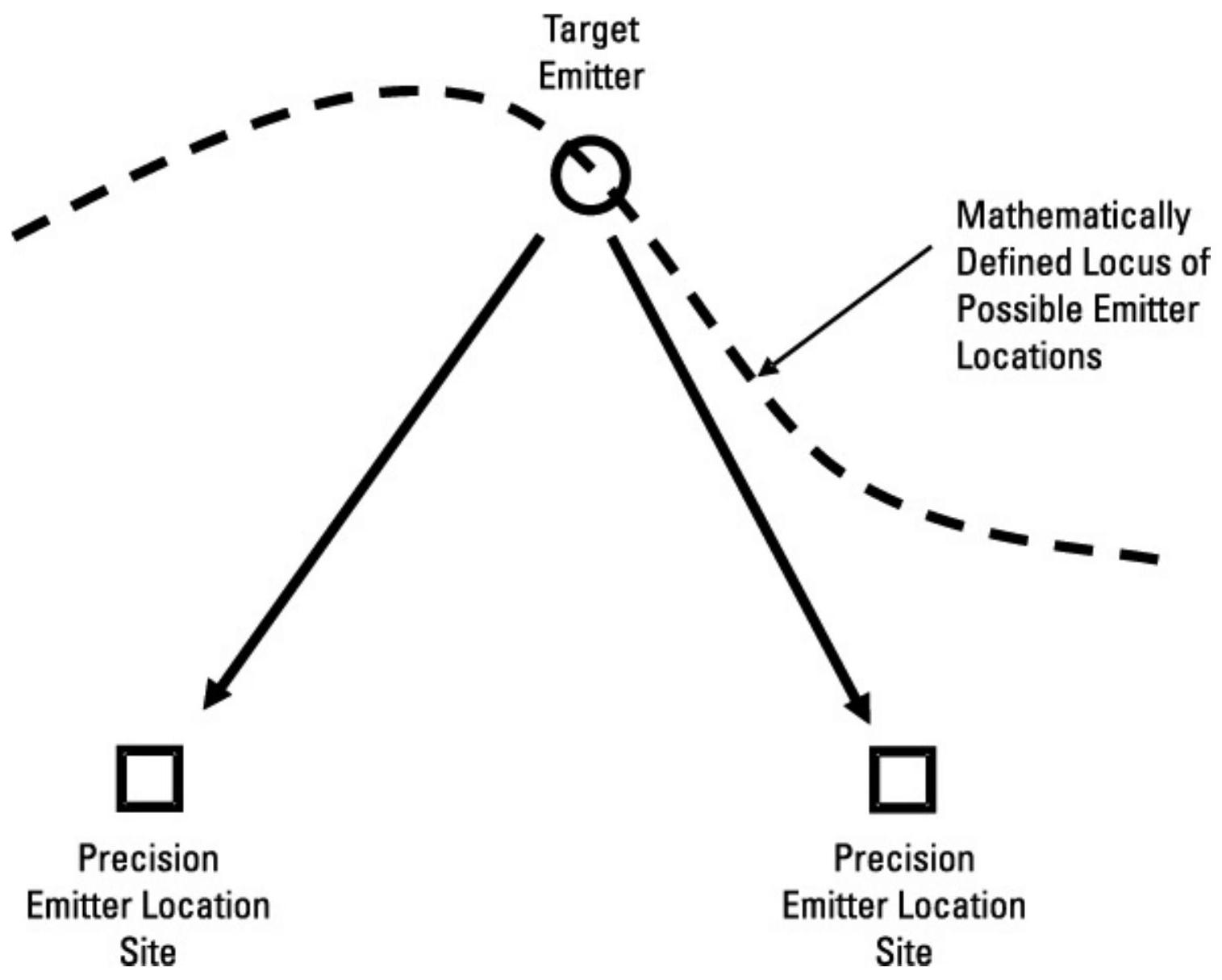
图 6.42 两个精密发射机定位站通过分析同一信号在两个远距离发射机定位站接收的信号,确定可能发射机位置的数学定义轨迹。
因此,如果平均误差在数学上被去除,则 RMS 误差等于真实到达角的标准差。如果误差来源可视为正态分布,标准差为 \(34\%\)。如图 6.43 所示,RMS 误差线描述了围绕真实方位线的区域,其中任何测量到的到达角有 68\% 的概率落在该区域内。换一种方式看,这意味着如果系统测量一个特定角度,则有 68\% 的概率真实发射机位置位于所示的楔形区域内。假设在数据处理过程中已去除测量的平均误差。
6.6.5 校准¶
校准涉及上述误差数据的收集。然而,这些误差数据用于生成校准表。这些表存储在计算机内存中,保存许多测量 DOA 和频率值的角度修正。当在特定频率下测量到 DOA 时,将根据计算出的角度误差进行调整,并报告修正后的到达角。如果测量 DOA 位于两个校准点之间(角度或频率),则通过插值确定修正系数。请注意,对于某些特定的 DF 技术,稍微不同的校准方案可能会产生更好的结果。这些将在讨论相应技术时进一步说明。
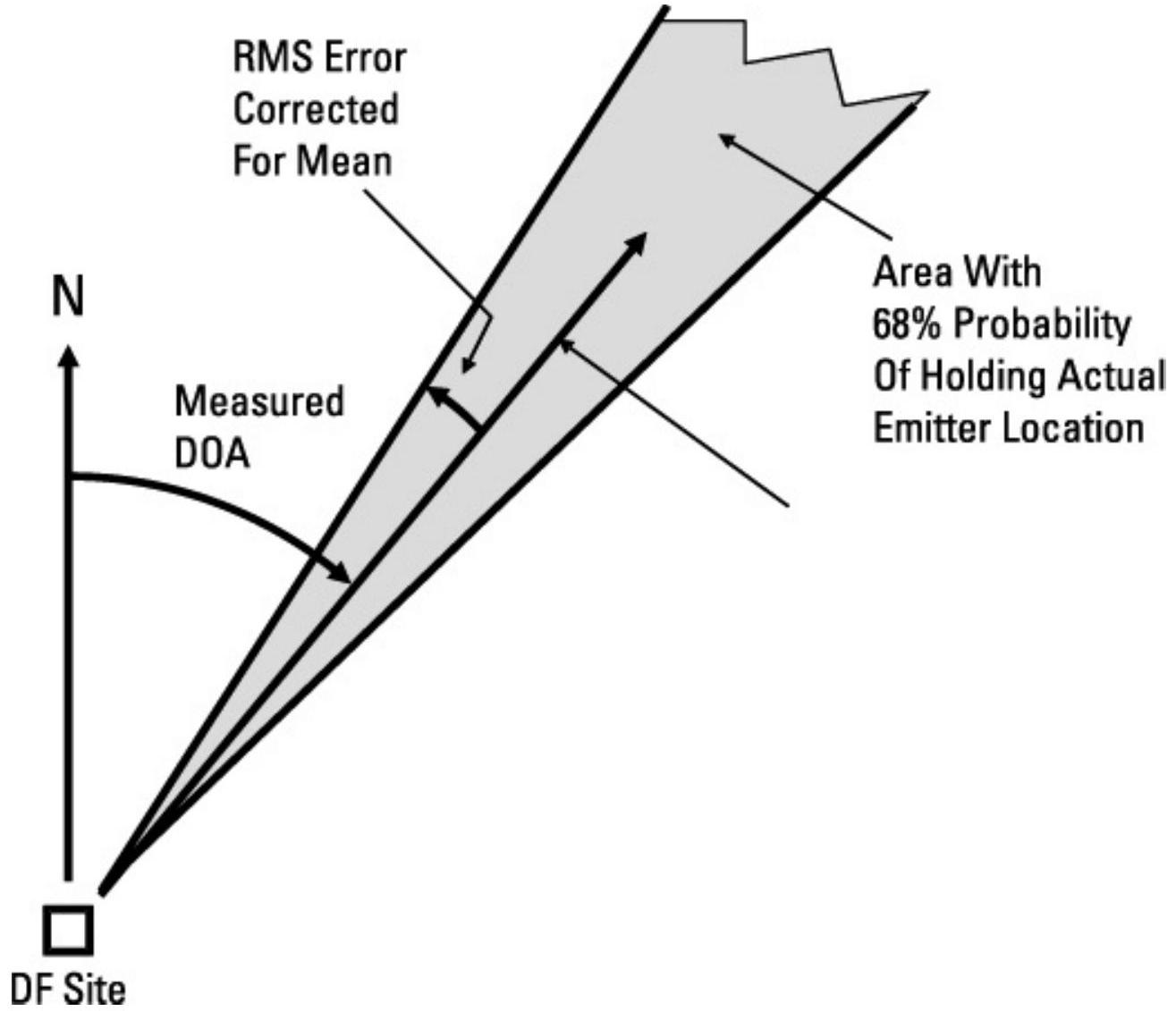
图 6.43 测量 DOA 的 ± RMS 误差减去平均误差的楔形区域,有 68\% 的概率包含实际发射机位置。
6.6.6 CEP¶
圆误差概率(Circular Error Probable, CEP)是轰炸和火炮领域的术语,指围绕瞄准桩的圆的半径,在该圆内落下的炸弹或炮弹有一半的概率命中目标。在发射机定位系统评估中,我们使用此术语表示围绕测得发射机位置的圆的半径,该圆内有 50% 的概率包含真实发射机位置,如图 6.44 所示。CEP 越小,系统精度越高。术语 90% CEP 也用于描述测得位置周围的圆,该圆有 90% 的概率包含真实发射机位置。图 6.45 显示了两个 DF 系统的 CEP 和 RMS 误差,这两个系统用于测量发射机的位置。请注意,这两个系统相对于目标具有理想几何关系(即从目标看为 90°)。

图 6.44 CEP 是围绕测量发射机位置的圆的半径,该圆有 50% 的概率包含实际发射机位置。

图 6.45 CEP 与两个 DF 站的 RMS 误差相关,这两个 DF 站通过三角测量计算目标发射机的测量位置。
6.6.7 EEP¶
椭圆误差概率(Elliptical Error Probable, EEP)是指在两个与目标不具理想几何关系的站测量发射机位置时,包含实际发射机的概率为 50% 的椭圆。90% EEP 也常被考虑。EEP 可绘制在地图上,如图 6.46 所示,不仅表示测得的发射机位置,还显示指挥官对位置测量结果的置信度。
CEP 也可以通过 EEP 由以下公式确定:
其中 \(a\) 和 \(b\) 分别是 EEP 椭圆的长半轴和短半轴。
CEP 和 EEP 也适用于精密发射机定位技术,这些将在后文详细描述。
6.6.8 站点位置与北向参考¶
为了执行三角测量或单站发射机定位,必须知道每个 DF 站点的位置并将其输入计算过程中。对于到达角(AOA)系统,还必须有一个方向参考(通常为真北)。精密发射机定位技术也需要站点位置。如图 6.47 所示,站点位置和参考方向的误差会导致目标发射机到达角的测量误差。此图被刻意夸大以显示误差的影响。通常,站点位置和参考方向的误差量级与测量精度误差相当。如后续示例所示,这些误差通常只有几度。
图 6.48(也被刻意夸大)显示了测量误差、站点位置误差和方向参考误差引起的定位误差。如果某个误差来源是固定的,则必须直接加入到位置精度中。站点位置误差通常被视为固定误差。然而,当误差来源是随机且相互独立时,它们会被“RMS化”处理,即最终的 RMS 误差是各个误差贡献平方平均值的平方根。
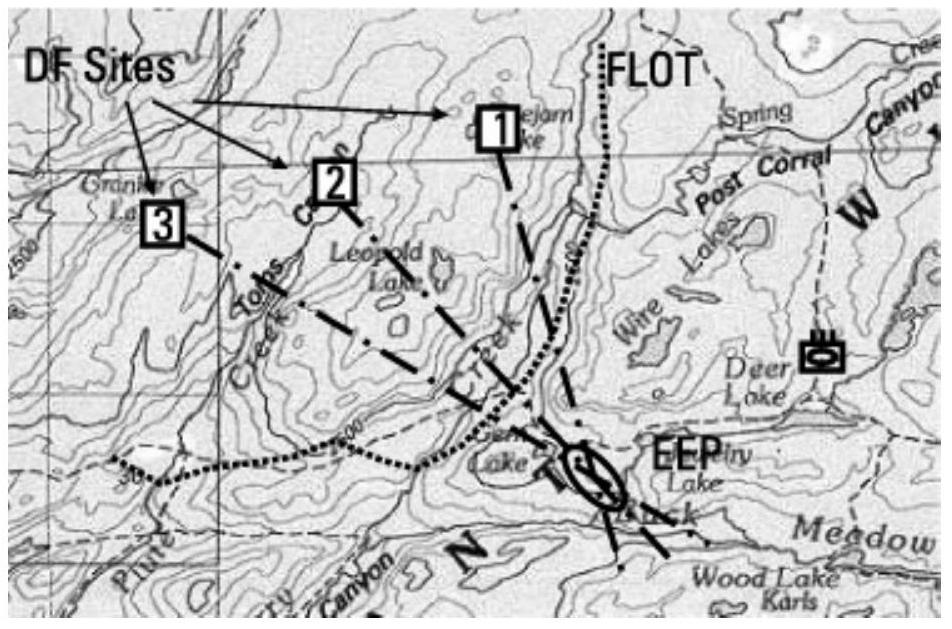
图 6.46 测得发射机位置的 EEP 可叠加在战术地图上,为指挥官提供测量位置精度的置信水平。
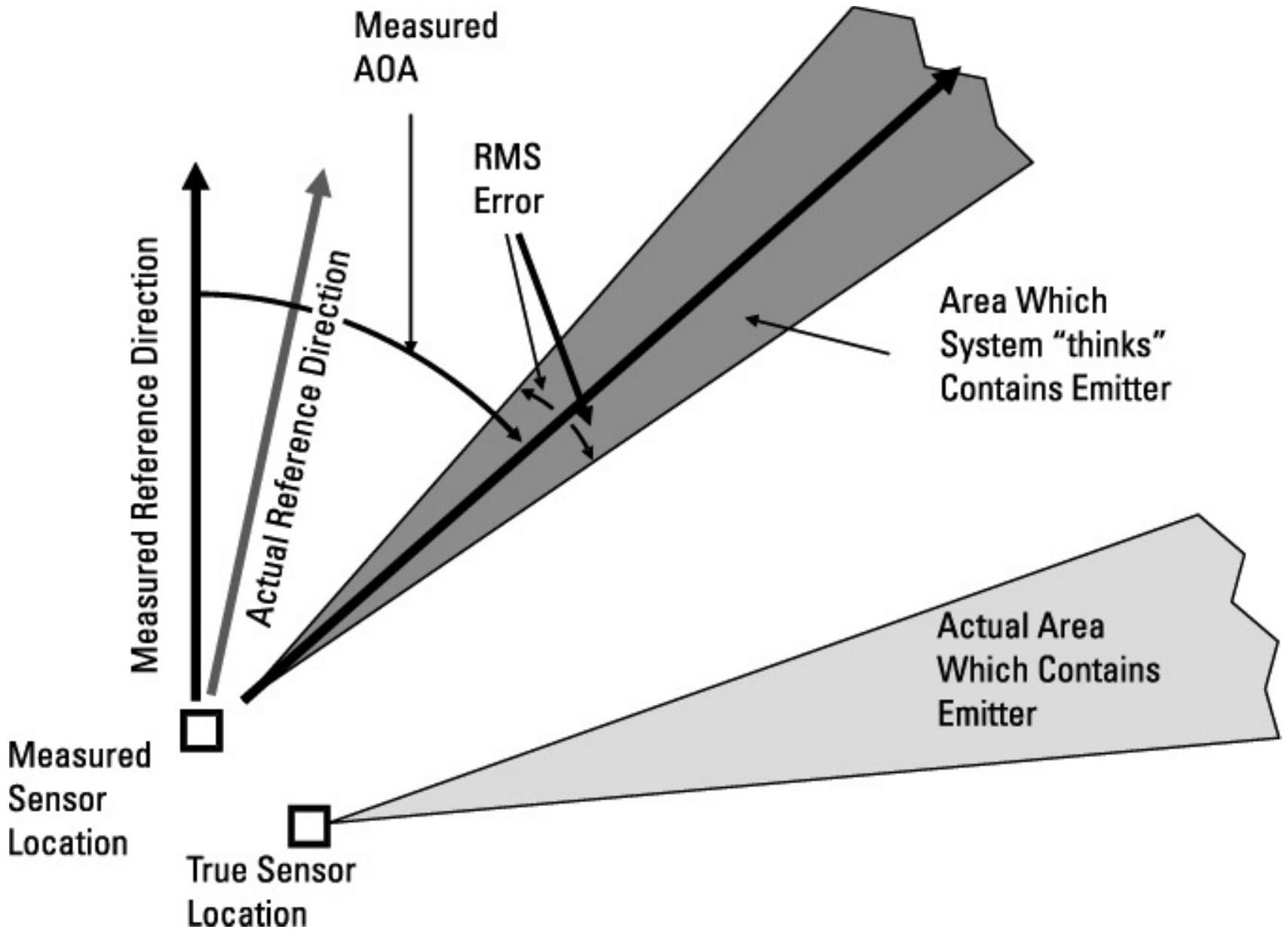
图 6.47 在 AOA 系统中,传感器位置误差和参考方向误差会导致报告的发射机位置不准确。
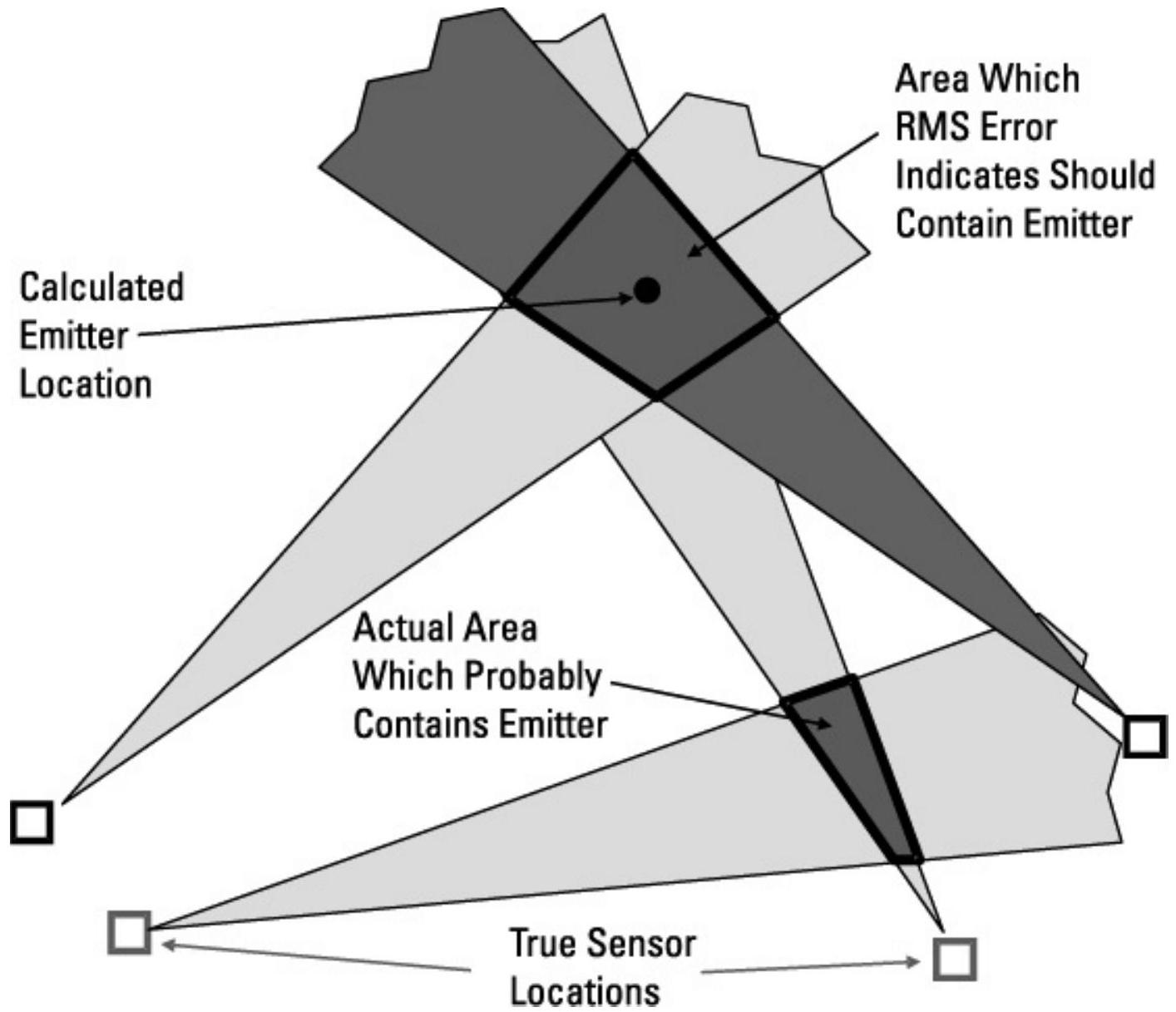
图 6.48 敌方发射机位置的 AOA 系统定位精度受测量误差以及传感器位置和参考方向误差的影响。
在 1980 年代中期之前,确定 DF 站位置是非常具有挑战性的。地面 DF 系统需要通过测量技术确定 DF 站位置,并手动输入系统。北向参考要求 DF 天线阵列定向并稳定到指定方向,或者阵列定向自动测量并输入。对于移动站点,自动北向感应尤为重要。
磁力计是一种感应当地磁场并提供电子输出的仪器,功能上相当于数字磁力罗盘。当磁力计集成到地面系统的天线阵列中时,其(磁性)北向参考可以自动输入到执行三角测量的计算机中。本地磁偏角(即磁北相对真北的偏差)必须手动输入系统以计算每个站点的方位参考。磁力计精度通常约为 \(1.5^{\circ}\)。如图 6.49 所示,磁力计通常集成在 AOA 系统的 DF 阵列中,这避免了将天线阵列定向至磁北的困难过程,显著缩短了系统部署时间。
大型舰载 DF 系统可以从船舶导航系统获取位置和方向参考,船舶导航系统多年来一直非常准确。船舶惯性导航系统(INS)可由高技能的导航员手动校正,以提供长期位置和方向精度。
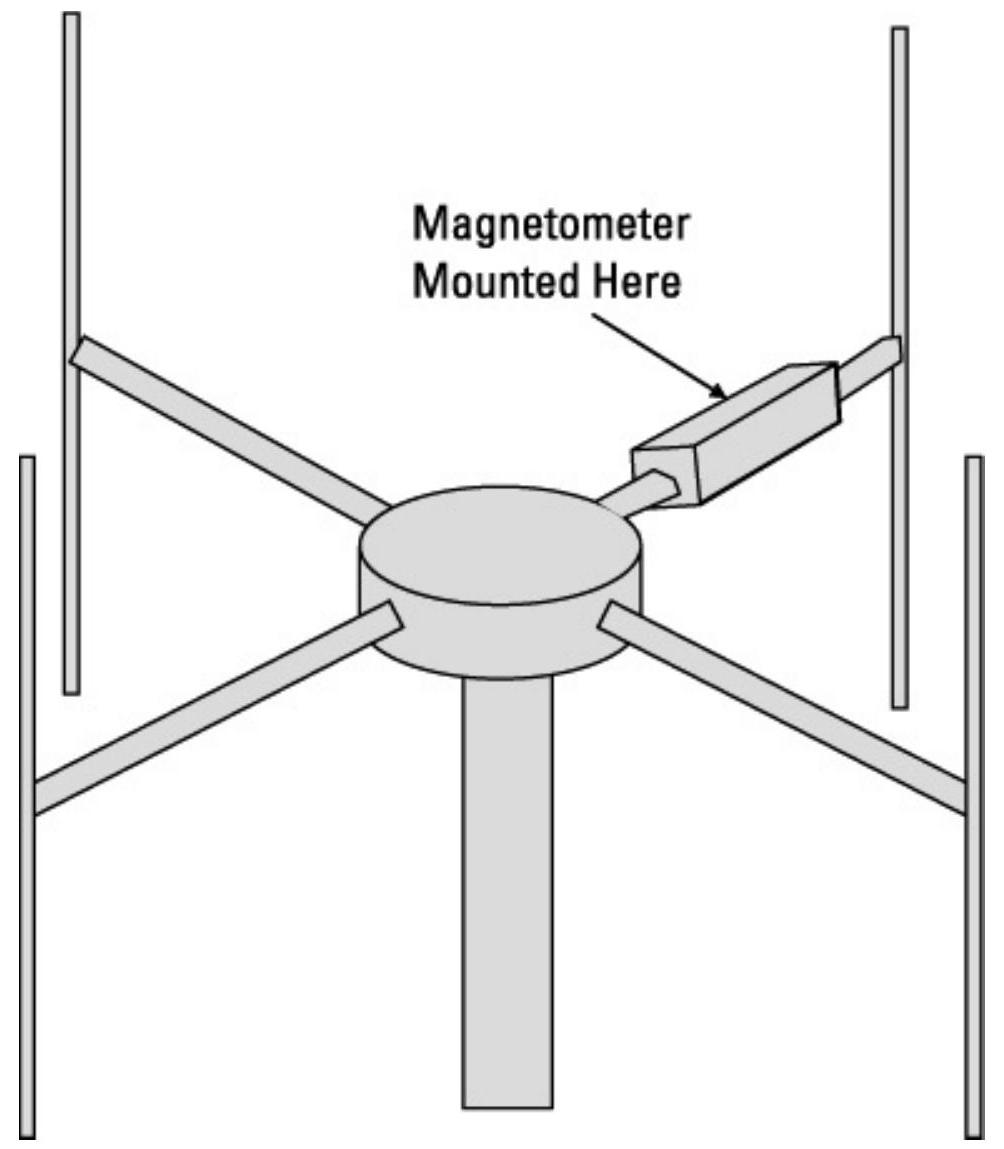
图 6.49 安装在方向测量阵列中的磁力计测量阵列相对于磁北的方位。
空中 DF 系统同样需要知道并输入每个 DF 系统的位置和方位信息到三角测量计算中。这由飞机的 INS 提供,INS 在每次飞行任务前需要进行广泛的初始化程序。INS 的北向参考来自两个机械旋转陀螺仪(相互垂直 90°),横向位置参考来自三个正交加速度计,如图 6.50 所示。每个陀螺仪只能测量其旋转轴垂直方向的角运动,因此需要两个陀螺仪提供三维方向。每个加速度计的输出积分一次得到横向速度,再积分一次得到位置变化(每次沿一维)。陀螺仪和加速度计安装在 INS 的机械稳定平台上,该平台在飞机机动过程中保持稳定方向。飞机离开机场的指北盘或从航母起飞后,由于陀螺仪漂移和加速度计累积误差,位置和方向精度随时间线性下降。因此,空中平台发射机定位精度取决于任务持续时间。
此外,有效的空中 DF 系统需部署在足够大的平台以支持 INS 安装(约 2 立方英尺)。
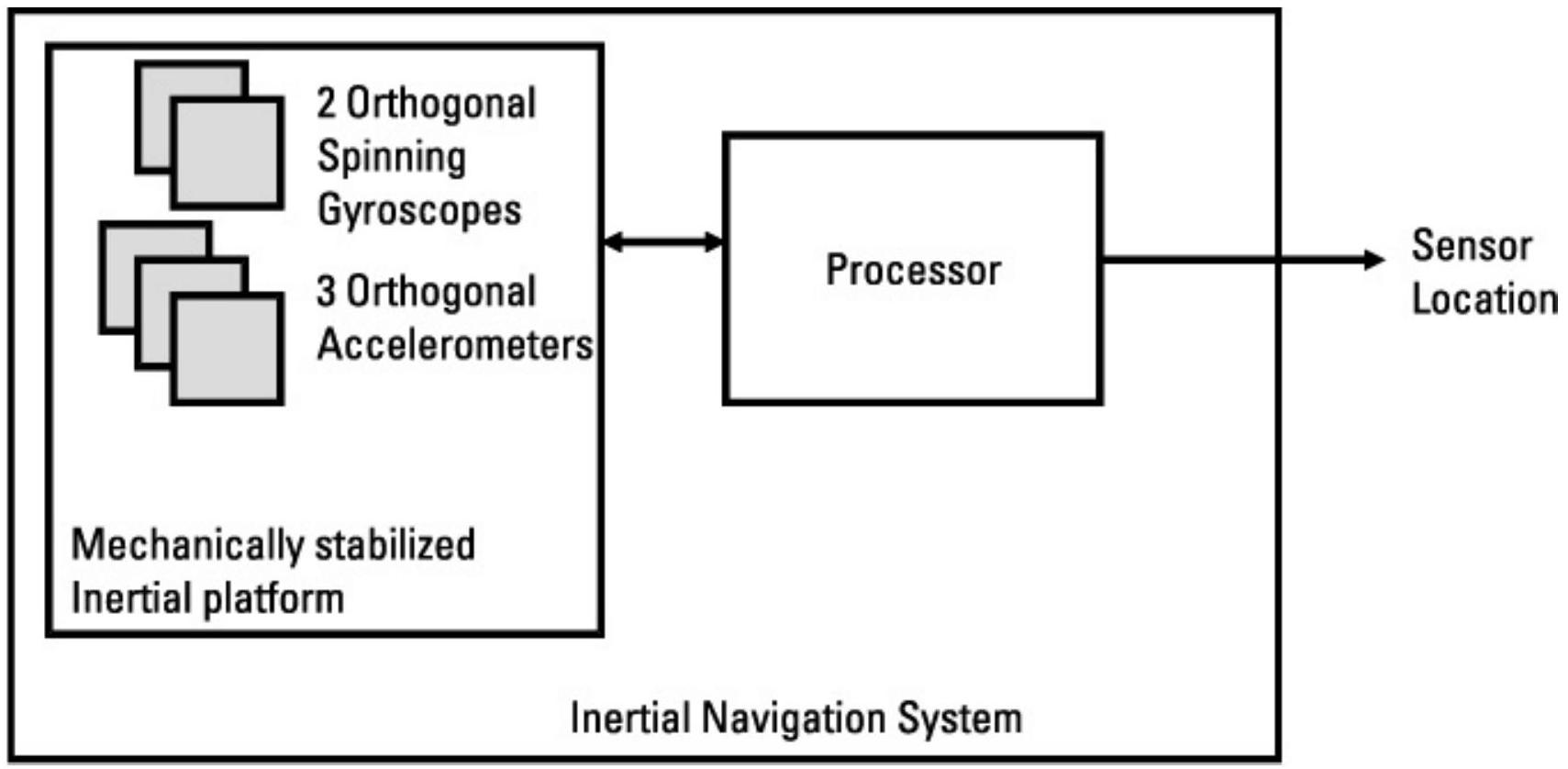
图 6.50 较早的惯性导航系统需要机械稳定的惯性平台,该平台通过两个相隔 90° 的陀螺仪保持方向,并通过三个正交加速度计测量横向运动。自系统校准后,位置和方向精度随时间线性下降。
1980 年代末,全球定位系统(GPS)卫星投入轨道,小型、廉价、耐用的 GPS 接收机开始可用。GPS 对移动资产定位方式产生了重大影响。现在,小型飞机、地面车辆甚至下车人员的位置可以自动(电子)测量,精度足够支持发射机定位。这使得许多低成本 DF 系统提供了显著更好的定位精度。
GPS 也对 INS 装置的工作方式产生了重大影响。由于绝对位置可以随时直接测量,INS 的位置精度不再依赖任务持续时间。如图 6.51 所示,惯性平台输入通过 GPS 接收机数据进行更新。位置由 GPS 直接测量,角度更新可通过多次位置测量推导。
随着新型加速度计和陀螺仪的发展,以及电子元件显著微型化,INS 系统现在可以实现更小尺寸和重量,且无活动部件。环形激光陀螺仪通过三面精密镜子沿闭合路径反射激光脉冲,通过测量激光沿圆周路径的时间确定角速度。速度积分确定方位。三只环形激光陀螺仪可确定三轴方向。压电加速度计已替代旧的弹簧负荷型加速度计,同时还有非常小的压电陀螺仪测量角速度。
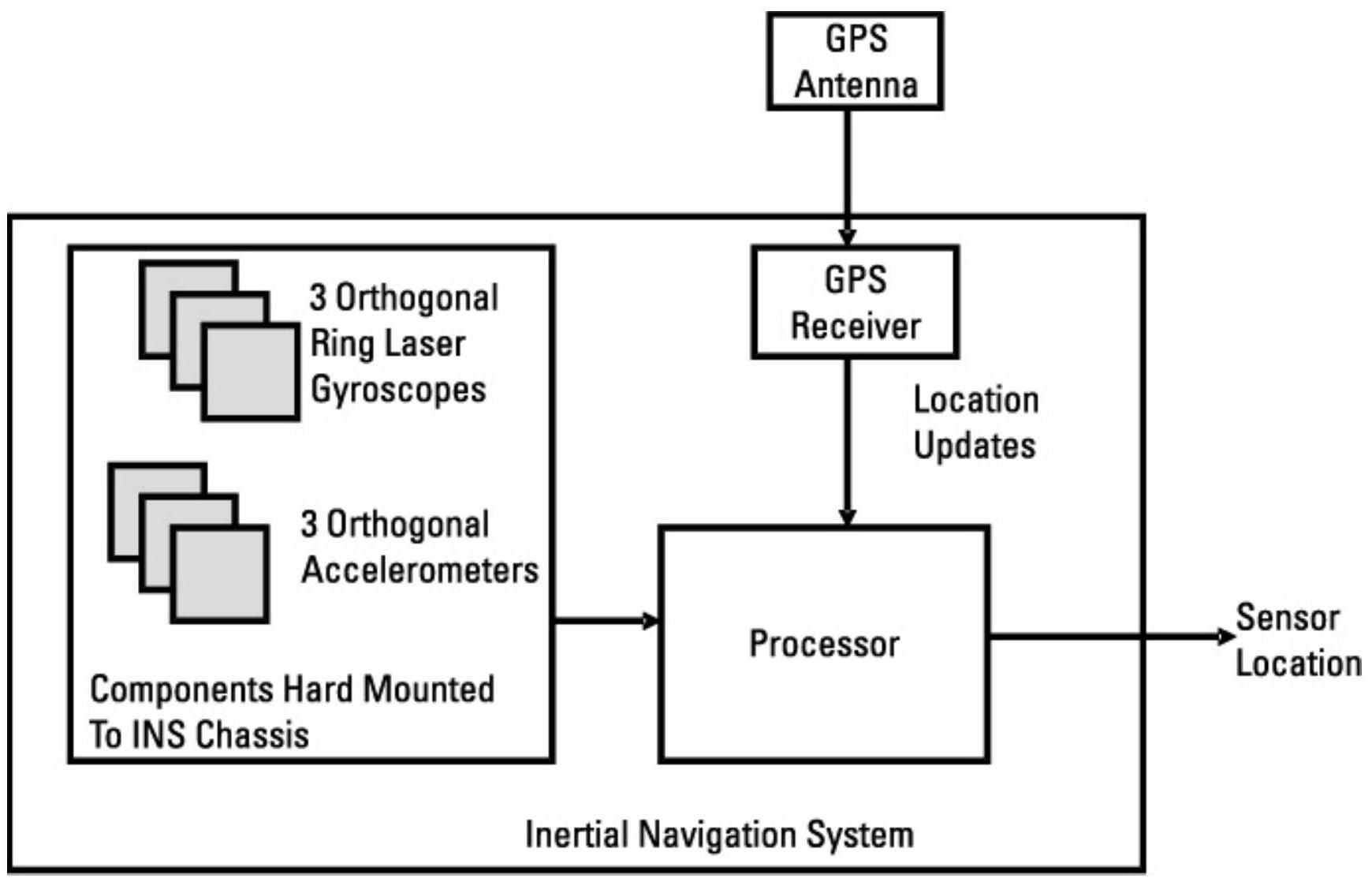
图 6.51 GPS 增强惯性导航系统利用 GPS 接收机输入提供长期位置精度。
GPS 的另一个价值是为固定或移动的发射机定位站提供非常精确的时钟。这一时钟功能是后续讨论的精密定位技术所必需的。GPS 接收机/处理器与 GPS 卫星上的原子钟同步,实现了在一块电路板和天线上创建虚拟原子钟。(注意,实际原子钟比面包盒大。)因此,GPS 使小型平台能够使用精密发射机定位技术。
6.6.9 中等精度技术¶
由于中等精度系统是方向测量系统,它们的精度通常用 RMS 角度精度来定义。中等精度系统的一个较合理数值为 \(2.5^{\circ}\) RMS。这是大多数 DF 方法在未校准情况下能够实现的精度。稍后我们会详细讨论校准,但目前,校准意味着系统地测量并修正发射信号到达角(AOA)测量中的误差。
目前使用的中等精度系统有很多,它们被认为足以用于电子兵力态势信息的开发。也就是说,它们可以以足够精确的方式定位敌方发射机,从而分析敌方军事组织的类型、物理接近程度及其行动。专家分析员利用这些信息来确定敌方的兵力部署并预测敌方战术意图。
这些系统通常也较小、重量轻且成本低。一般来说,系统精度越高,对站点位置和参考的精度要求也越高。这在小型(低成本)系统中是一个显著问题。然而,随着小型、低成本惯性测量单元(IMU)的日益普及,这一问题已经变得容易解决。结合 GPS 位置参考,IMU 可为中等精度 DF 系统提供足够的位置和角度参考。
用于通信发射机定位的两种典型中等精度技术是 Watson-Watt 法和多普勒法。
6.6.10 Watson-Watt 方向测量技术¶
如图 6.52 所示,Watson-Watt DF 系统有三个接收机,连接到一个圆形排列的天线阵列,阵列天线数量为偶数(四个或更多),中央还有一个参考天线。圆形阵列的直径约为四分之一波长。
阵列中两根外侧天线(彼此相对)分别接入两个接收机,中央参考天线接入第三个接收机。在处理过程中,两个外侧天线信号的幅度差以中央参考天线信号的幅度为基准(即除以中央信号幅度)。这种信号组合在三个天线周围产生心形增益模式(增益随到达方向变化),如图 6.53 所示。通过将另一对相对天线切换到接收机 2 和 3,可以形成第二个心形模式。在切换瞬间,我们因此获得心形图上的两个点。经过对所有相对天线对依次切换几次后,即可计算信号的到达角(DOA)。

图 6.52 Watson-Watt DF 系统使用一个多外天线和中心参考天线的阵列。
Watson-Watt 技术适用于所有类型的信号调制,未校准情况下可实现约 \(2.5^{\circ}\) RMS 误差。
6.6.11 多普勒方向测量技术¶
如图 6.54 所示,如果一根天线围绕另一根天线旋转,移动天线 (A) 接收到的发射信号频率将不同于固定天线 (B) 接收到的频率。当移动天线朝向发射机移动时,接收频率会因多普勒效应而升高;当远离发射机移动时,频率会降低。这种频率变化呈正弦波形式,可用于确定发射信号的到达方向(DOA)。注意,发射机位于图中正弦波负向过零点对应的方向。
在实际应用中,多个圆形排列的外天线依次切换到接收机 A,而另一接收机 B 连接到阵列中的中央天线,如图 6.55 所示。每次系统将外侧天线切换到接收机 A 时,都会测量接收信号的相位变化。经过几次旋转后,系统可根据相位变化数据构建天线 A 相对于天线 B 的频率正弦变化,从而确定发射信号的到达角(AOA)。
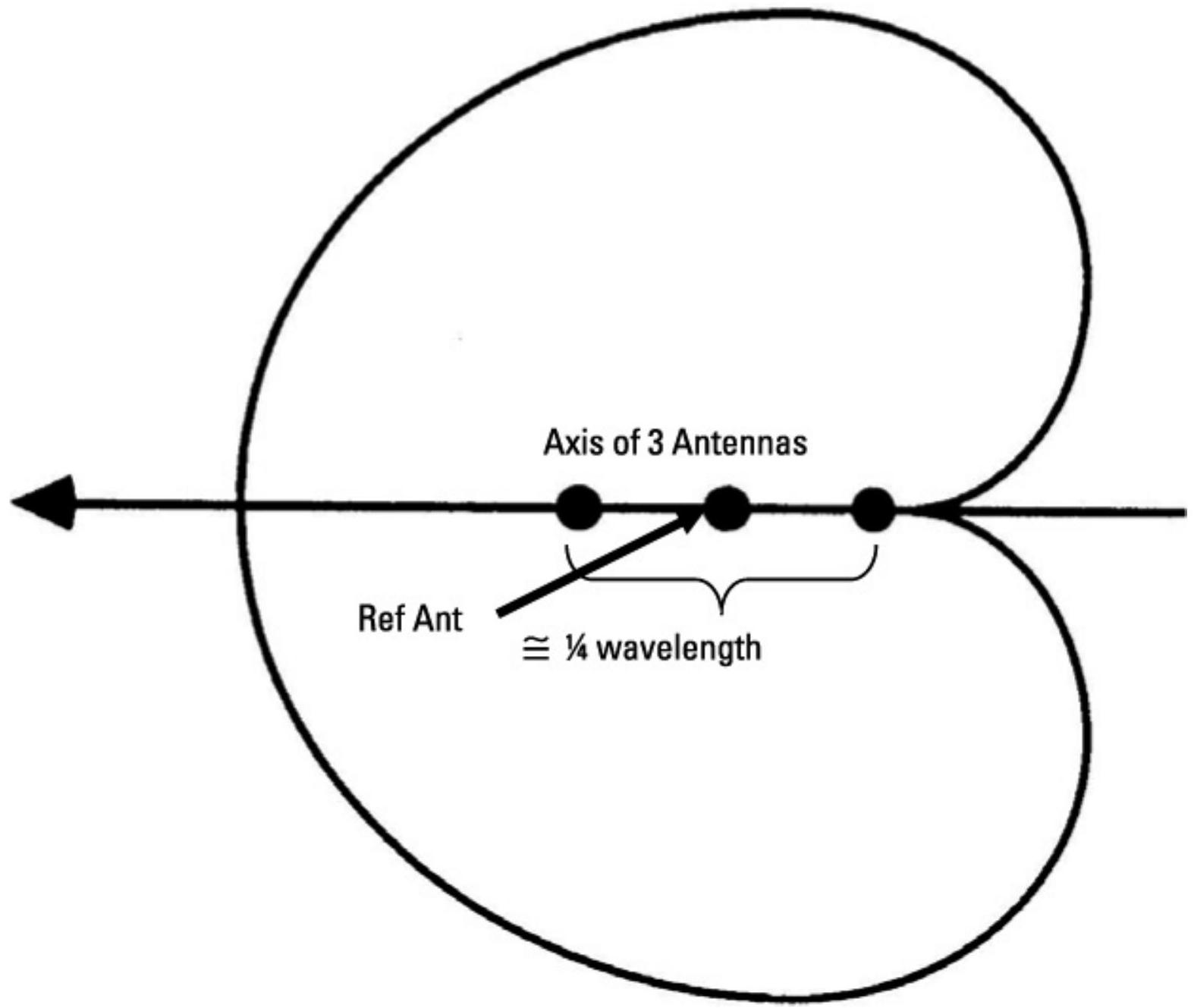
图 6.53 当 Watson-Watt 阵列中两个相对外天线的差值以中央参考天线为基准归一化时,得到的天线阵列增益随到达角的变化呈心形模式。
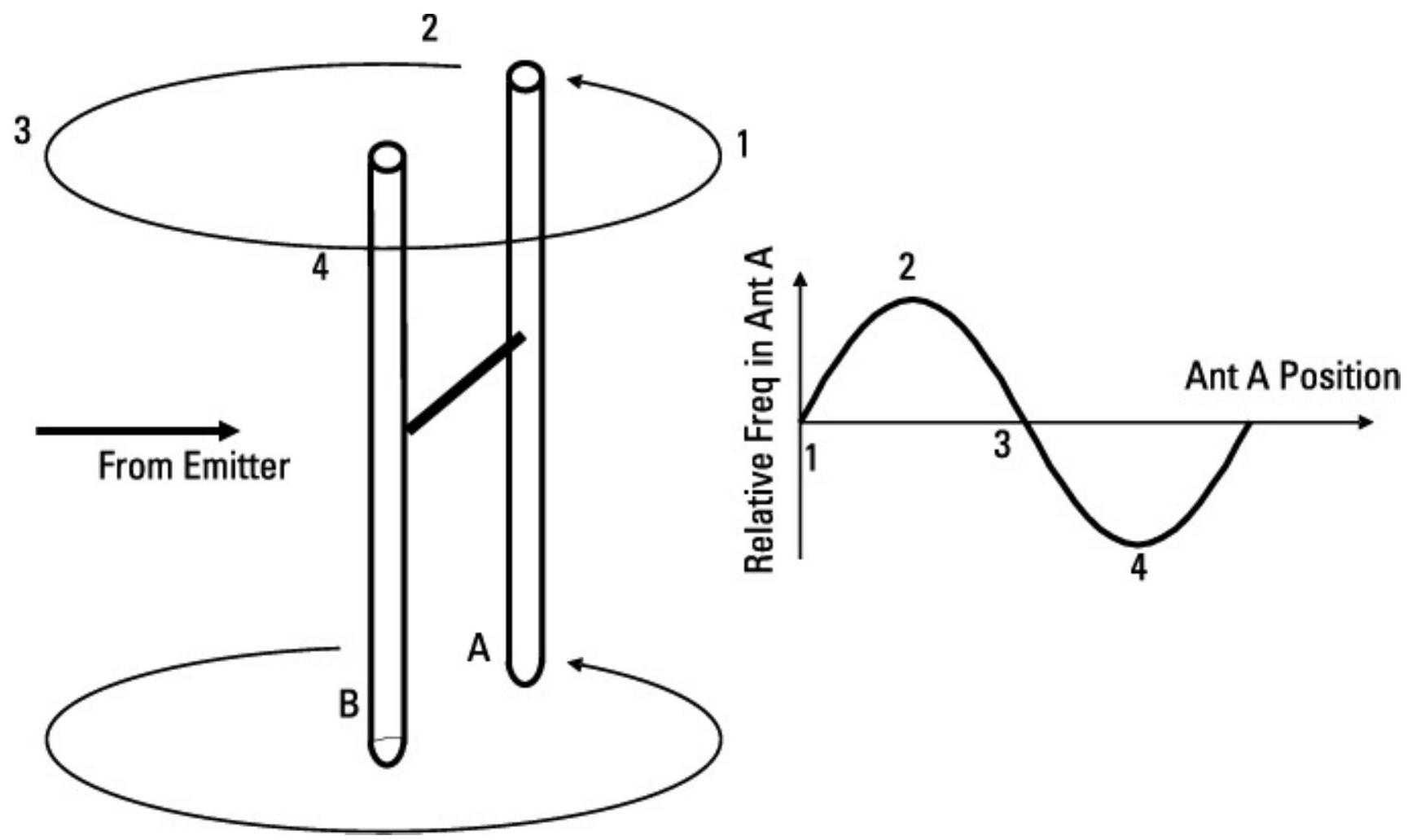
图 6.54 如果天线 A 围绕固定天线 B 旋转,接收信号频率随旋转角度相对于发射机方向呈正弦波变化。

图 6.55 在多普勒 DF 系统中,外天线依次切换到接收机 A,而中央天线连接到接收机 B。
多普勒技术在商业应用中被广泛使用,所需外天线最少为三根,加上中央参考天线。其典型 RMS 精度约为 \(2.5^{\circ}\)。然而,该技术在处理调频信号时存在困难,除非其调制可以与顺序切换外天线产生的表观多普勒频移清晰区分开。
6.6.12 定位精度¶
如图 6.56 所示,敌方发射机位置的线性误差(\(\Delta\))是角度误差与发射机距离的函数。其公式为:
在 20 km 距离处,指示方位线上的 \(2.5^{\circ}\) 角度误差会导致线性误差(\(\Delta\))为 873 m。
我们评估发射机定位系统战术实用性的方法是通过其提供的 CEP 来衡量。为了评估中等精度 DF 系统的有效定位精度,我们将计算两个各自距离目标发射机 20 km、RMS 精度为 \(2.5^{\circ}\) 的 DF 系统提供的 CEP。我们假设战术几何为理想情况,即从发射机位置来看,两站之间夹角为 \(90^{\circ}\)。
图 6.56 在 20 km 距离下,\(2.5^{\circ}\) 角度误差导致线性误差为 873 米。
为了计算这种情况下的 CEP,我们首先确定两个 DF 站 RMS 误差角限内的覆盖面积,如图 6.57 所示。除了最严谨的数学家外,我们可以将该区域近似为边长为 \(2\Delta\) 的正方形。回忆第 6.6.4 节,如果从 DF 系统的 RMS 误差中去除平均误差,剩下的就是标准差(\(\sigma\))。本问题假设已完成此处理。指示到达方向与 1 标准差(\(1\sigma\))线之间的角度楔形区域有 \(34.13\%\) 的概率包含真实到达角(AOA)。
两个 \(1\sigma\) 线之间的正方形区域边长为 \(2\Delta\)。根据上述数学计算,正方形包含实际发射机位置的概率为 \(46.6\%\)。敌方发射机位置的 CEP 是具有 \(50\%\) 概率包含位置的圆的半径。可通过以下公式计算:
图 6.57 由两个理想放置 DF 站的 \(\pm 1\sigma\) 线包围的区域,有 \(46.6\%\) 的概率包含实际发射机位置。
注意,1.073 项是为了将正方形包含发射机的 \(46.6\%\) 概率提高到 CEP 圆所需的 \(50\%\)。
将线性误差值代入公式,可得 CEP 为 1.02 km。
6.6.13 高精度技术¶
当我们谈论高精度发射机定位技术时,通常指干涉仪方向测量。干涉仪一般可以校准以提供约 \(1^{\circ}\) RMS 误差。有些配置精度更高,有些精度稍低。干涉仪是方向测量仪,仅测定信号的到达角(AOA)。发射机位置由前述技术(如三角测量)确定。
我们将首先讨论单基线干涉仪,然后介绍相关干涉仪和多基线干涉仪。
6.6.14 单基线干涉仪¶
尽管几乎所有干涉仪系统都使用多个基线,但单基线干涉仪每次仅使用一个基线。多基线的存在可用于解决歧义问题,同时允许对多个独立测量值进行平均,从而降低多径效应和其他设备误差源的影响。
图 6.58 是干涉式 DF 系统的基本框图。来自两个天线的信号在相位上进行比较,并根据测量的相位差确定信号的到达角(DOA)。记住,我们将发射信号描述为以光速传播的正弦波。传播正弦波的一个周期(360 相位度)称为波长。发射信号的频率与其波长的关系由以下公式定义:
其中 \(c\) 为光速(\(3 \times 10^{8} \mathrm{~m}/\mathrm{s}\)),\(\lambda\) 为波长(米),\(f\) 为频率(单位为 \(1/\mathrm{s}\))。
干涉原理通过干涉三角形说明最为清楚,如图 6.59 所示。图 6.58 中的两个天线形成一个基线,假设两天线之间的距离及其精确位置已知。波前是垂直于信号到达方向的直线,这是到达信号的等相线。信号从发射天线球面扩展,因此波前实际上是圆弧。然而,由于基线可假定远小于发射器距离,因此在图中将波前视为直线是合理的。站点的精确位置取基线中心。由于波前上信号相位相同,因此点 A 和点 B 的相位相等。因此,两个天线(即点 A 与点 C)之间信号的相位差等于点 B 与点 C 之间的相位差。
图 6.58 干涉仪比较两个天线处信号的相位,并利用相位差计算到达角。
图 6.59 干涉仪的工作原理通过干涉三角形说明最清楚。
线段 BC 的长度可通过以下公式得出:
其中 \(\Delta \Phi\) 为相位差,\(\lambda\) 为信号波长。图中点 B 的角度按定义为 \(90^{\circ}\),因此点 A 的角度(记为角 A)为:
其中 \(AC\) 为基线长度。信号的 DOA 相对于基线中心的垂直线报告,因为干涉仪在该角度提供最大精度。注意,此处相位度与角度度的比值最大。由构造可见,角 D 等于角 A。
干涉仪几乎可以使用任何类型的天线。图 6.60 显示了典型干涉仪阵列,可安装在金属表面,如飞机机身或舰船船体。水平阵列测量方位角,垂直阵列测量仰角。此类天线为腔体背螺旋天线,具有较大的前后比,仅提供 \(180^{\circ}\) 的角度覆盖。阵列中天线的间距决定精度和歧义。末端天线间距很大,因此提供优异精度。但其相位响应如图 6.61 所示。注意,相同的相位差可能对应多个不同的到达角。通过左侧两个间距不超过半波长的天线可解决此歧义,因此无歧义。
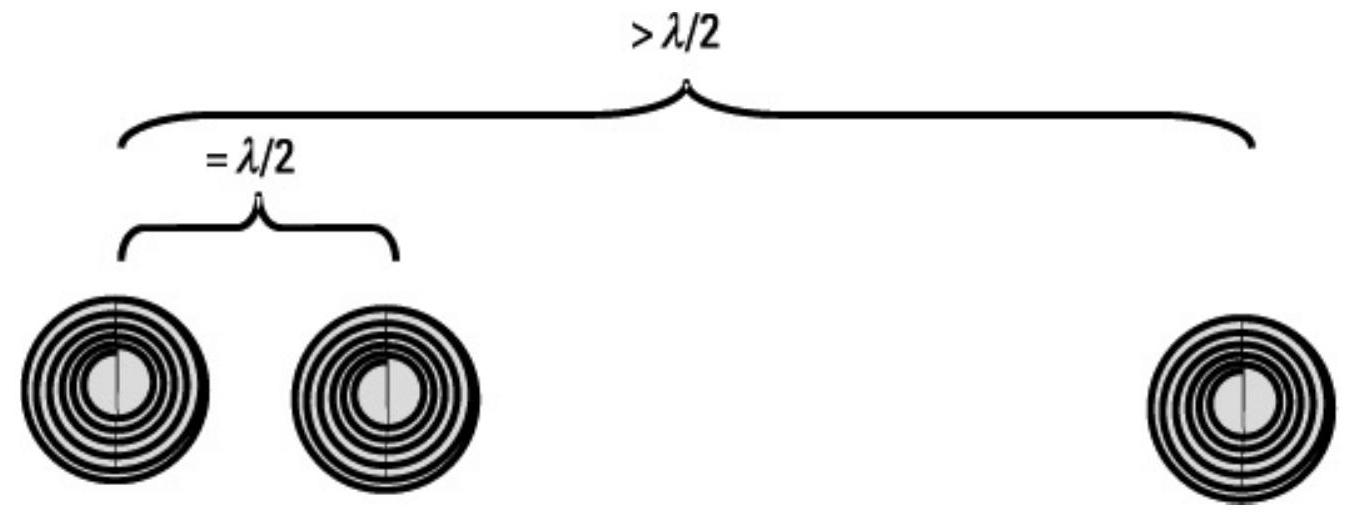
图 6.60 飞机或舰船上的干涉仪方向测量通常使用三个腔体背螺旋天线。
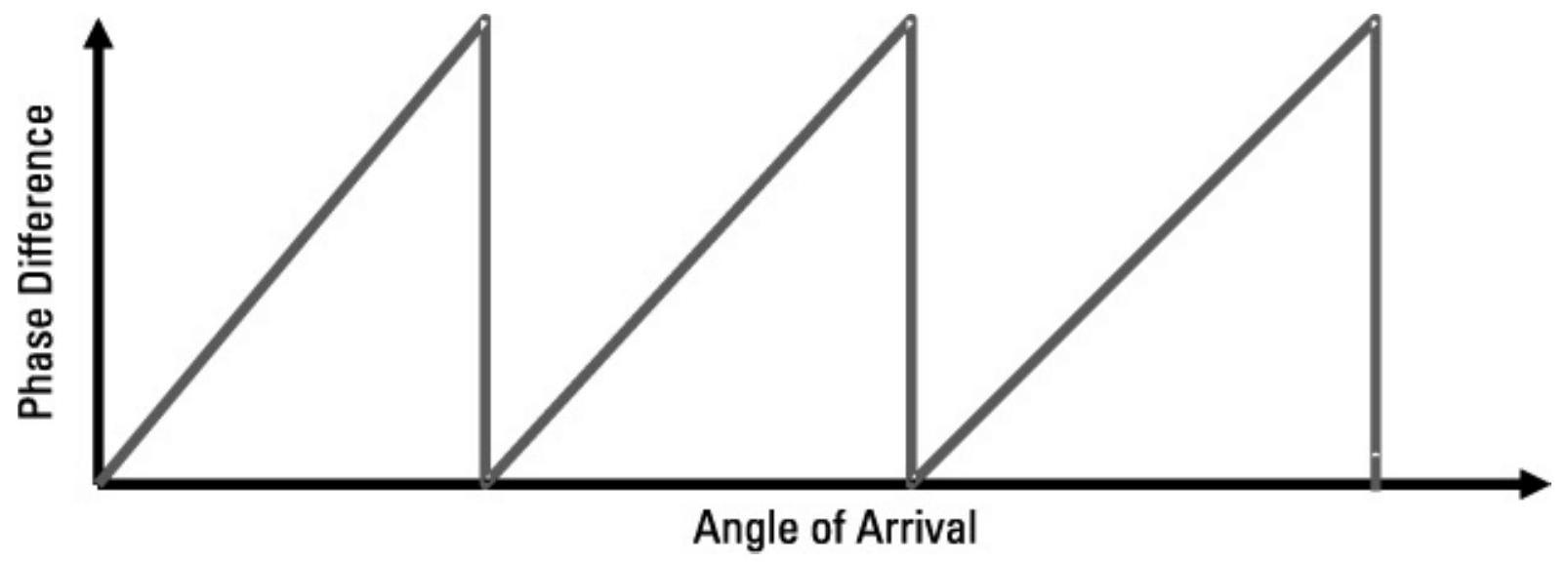
图 6.61 两个天线间距远大于半波长时,相位差与到达角高度歧义。
地面系统通常使用垂直偶极子阵列,如图 6.62 所示。为避免图 6.61 中的歧义,天线间距必须小于半波长。但若天线间距小于波长的十分之一,干涉仪精度不足。因此,单阵列仅可在 5:1 频率范围内进行方向测量。一些系统垂直堆叠多个偶极子阵列,每个阵列使用不同长度和间距的偶极子(高频使用较小且间距更近的偶极子)。注意,四个天线构成六条基线,如图 6.63 所示。
由于这些偶极子阵列覆盖 \(360^{\circ}\) 方位,干涉仪存在前后歧义,如图 6.64 所示,因为来自两个角度的信号会产生相同相位差。通过使用另一对天线进行第二次测量可解决此问题,如图 6.65 所示。正确的 DOA 在两次测量中相关,而歧义 DOA 不相关。
图 6.66 显示了典型干涉仪 DF 系统。天线按两根切换至相位比较接收机,依次测量各基线的 DOA。如果有四根天线,六条基线依次使用。通常,每条基线测量两次,将两个天线输入交换以平衡信号路径微小差异。然后将十二个 DOA 结果平均,报告最终 DOA。
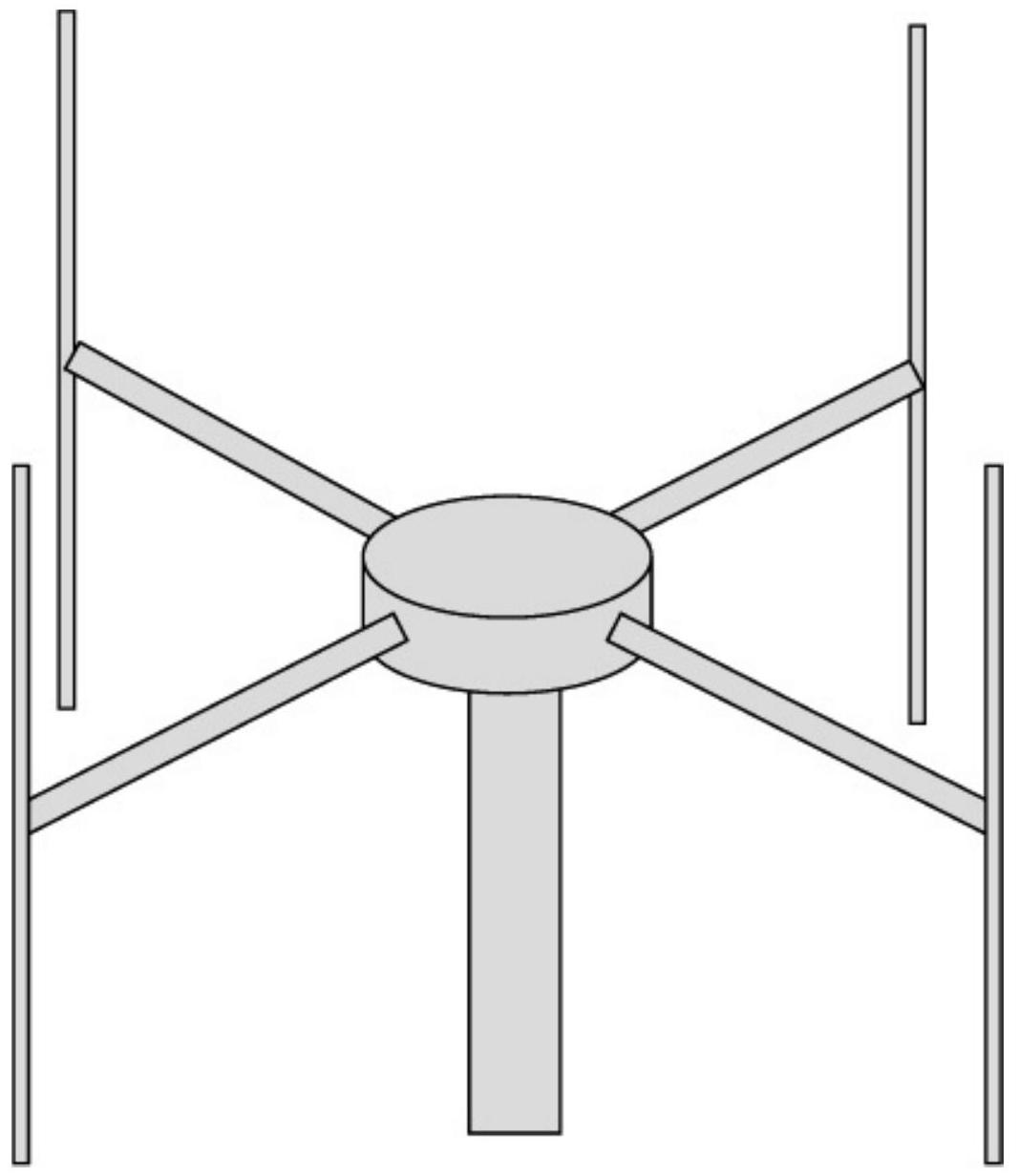
图 6.62 地面干涉仪通常使用垂直偶极子阵列以提供 \(360^{\circ}\) 覆盖。
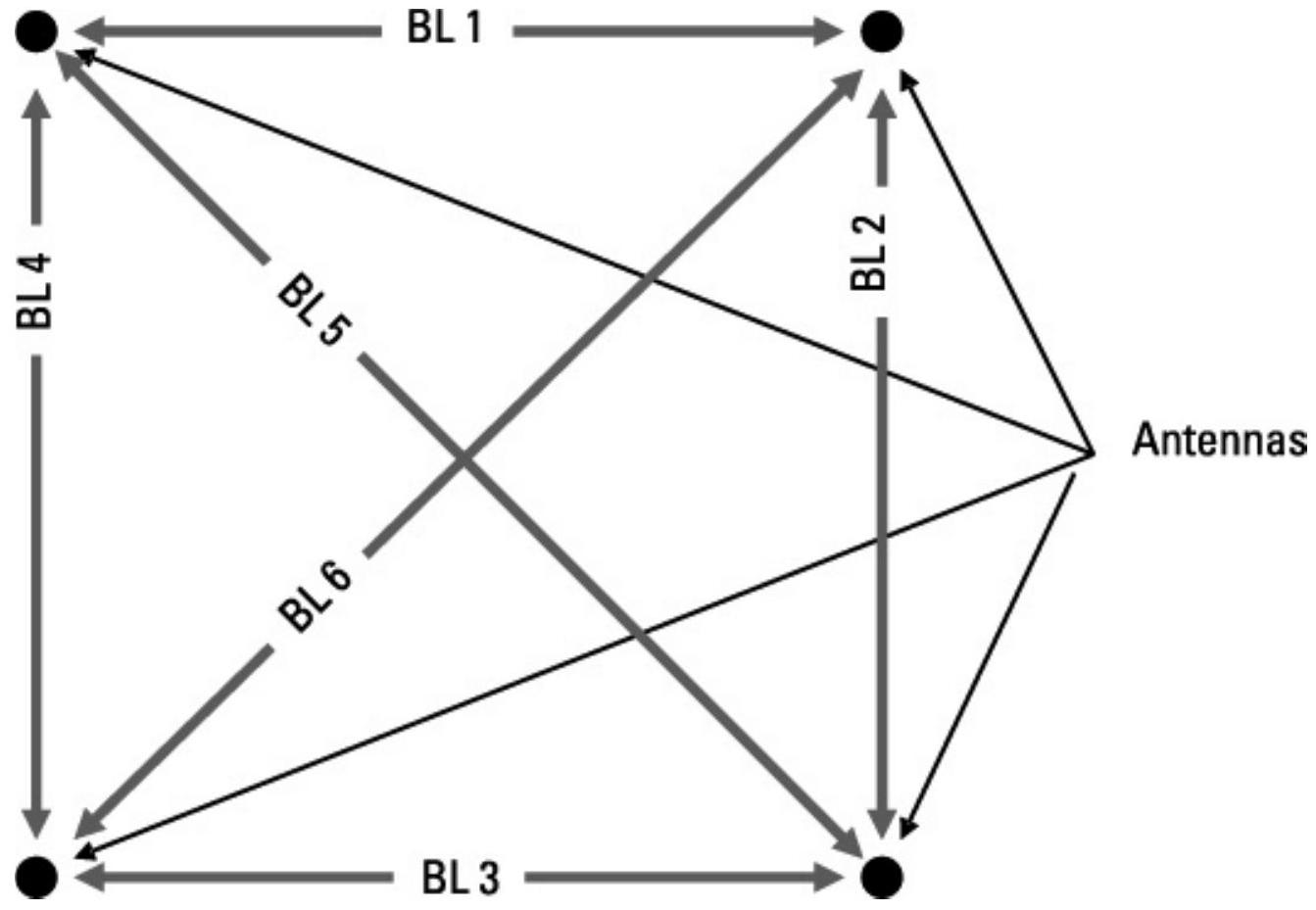
图 6.63 四天线阵列形成六条干涉基线。

图 6.64 两个 \(360^{\circ}\) 天线信号的相位差对于发射机方向信号和镜像方向信号相同。
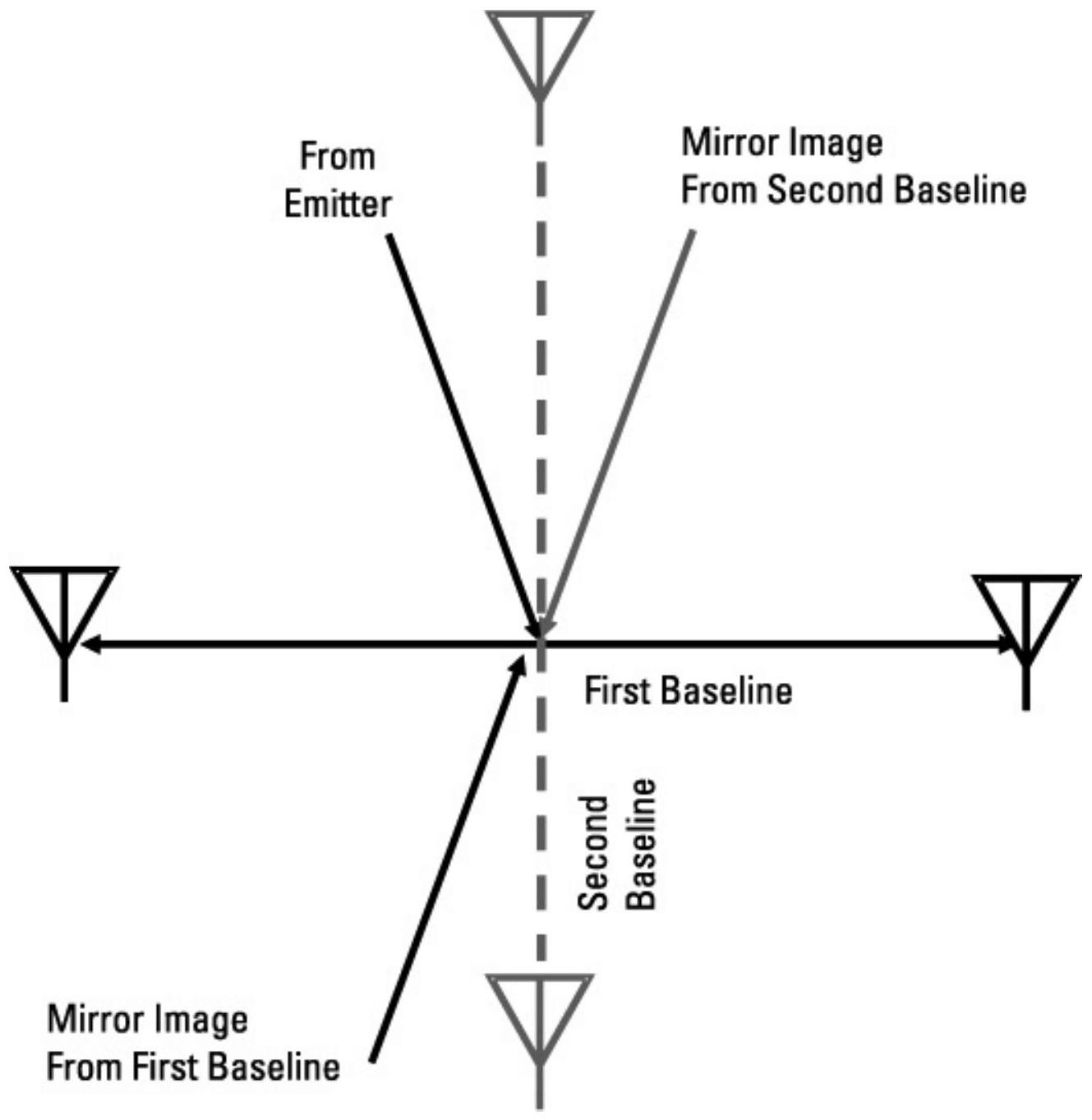
图 6.65 第二条基线的前后歧义与第一条基线的 DOA 不同。

图 6.66 干涉仪系统依次将两根天线切换到相位测量接收机,并依次计算每条基线的到达角。
6.6.15 多基线精密干涉仪¶
尽管多基线干涉仪通常仅应用于微波频率,但只要天线阵列长度可以满足要求,它可用于任何频率范围。如图 6.67 所示,存在多条基线,且都大于半波长。图中基线长度分别为 5、14 和 15 个半波长。
所有三条基线的相位测量结果在一次计算中使用模运算处理,以确定到达角(AOA)并解决所有歧义。这类干涉仪的优点是其精度可达到单基线干涉仪的 10 倍。低频时的缺点是天线阵列长度会非常长。
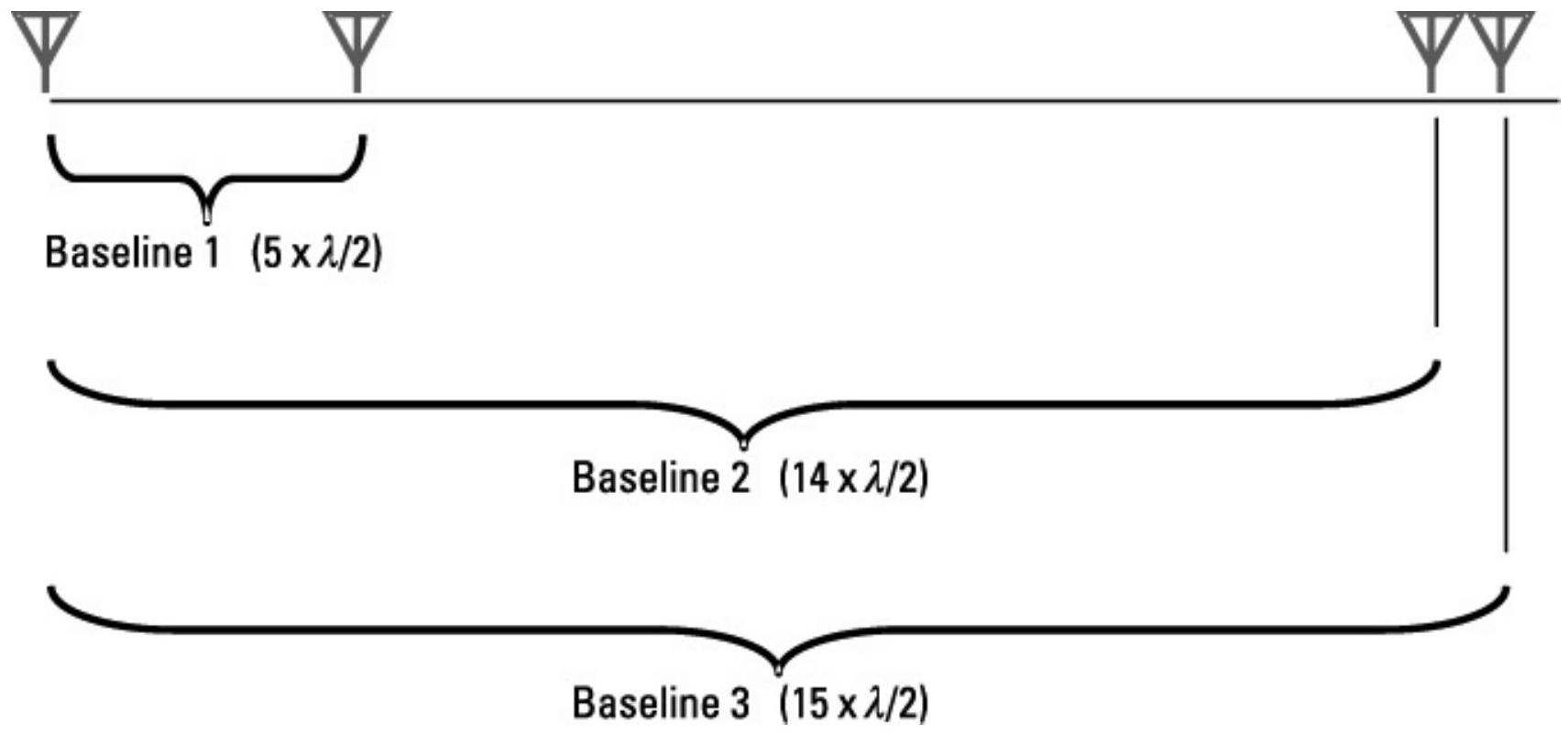
图 6.67 多基线精密干涉仪通过多条非常长的基线相位差计算高精度到达角。
6.6.16 相关干涉仪¶
相关干涉仪系统使用大量天线,通常为五到九根。每对天线形成一条基线,因此存在许多基线。天线间距大于半波长,通常为一到两波长,如图 6.68 所示。所有基线的计算中都存在歧义。然而,DOA 测量次数众多,可对相关数据进行稳健的数学分析。正确的到达角具有更高的相关值,并将被报告。
6.6.17 精密发射源定位技术¶
一般而言,这些技术能够提供足够精确的发射源位置,以支持打击任务。这意味着定位精度预计与武器的爆炸半径相当(数十米)。然而,还有其他应用可能需要极高精度的位置,例如判断两个发射源是否共址。
我们将讨论两种精密技术:到达时间差(TDOA)和到达频率差(FDOA),以及两者的组合。TDOA 和 FDOA 都要求每个接收站点配备高精度参考振荡器。早期,这需要每个站点安装原子钟,而现在 GPS 可以以显著更小的体积和重量提供等效功能。
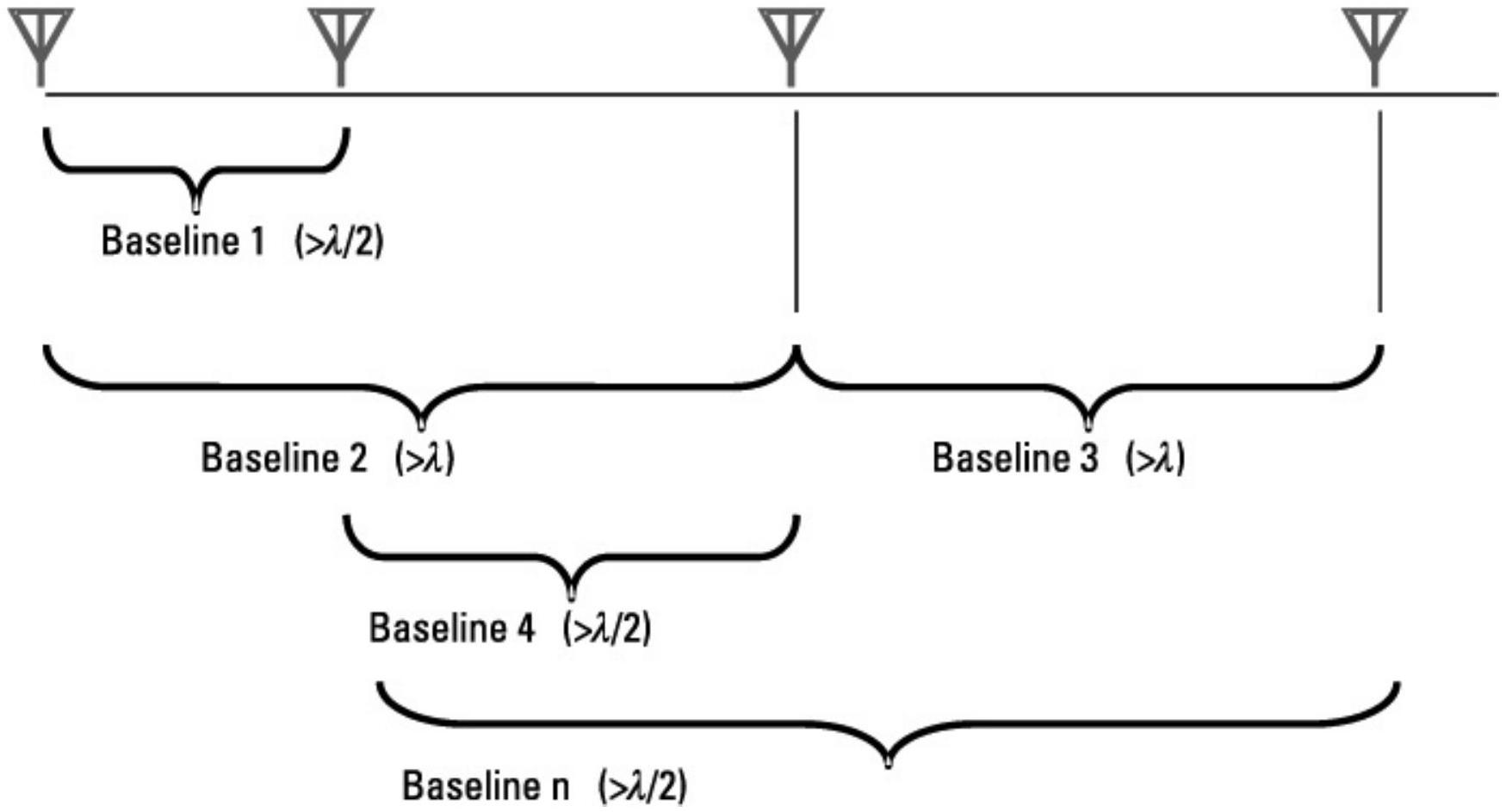
图 6.68 相关干涉仪使用多条基线,且所有基线长度均大于半波长。
6.6.18 到达时间差(TDOA)¶
TDOA 基于信号以光速传播的事实;因此,单个信号到达两个接收站点的时间差与它们到发射源的距离差成正比,如图 6.69 所示。如果我们知道信号离开发射机的精确时间以及到达每个接收器的时间,就可以计算出每个接收站到发射机的距离,从而获得精确的发射源位置。这在诸如 GPS 的合作系统中是可行的,其中发射信号携带了发射时间信息。
然而,当处理敌方信号时,我们无法知道信号离开发射机的时间。因此,我们只能确定两个到达时间的差值。由于通信信号是连续的,确定此到达时间差的唯一方法是延迟最接近发射机的接收器收到的信号,直到两信号的调制相互相关(见图 6.70)。这要求每个接收器具备可变延迟能力。(任意接收器都可能最接近发射机。)整个相对延迟范围实际上是在搜索可能的发射源位置区域。
在实际操作中,每次相对延迟变化时,各接收器都会对接收到的调制信号进行数字化,然后在一个集中位置对得到的数字信号进行相关处理。相关精度(几十纳秒)要求接收到的信号必须以非常高的速率进行采样和数字化。这需要两个接收站与执行相关处理的地点之间有较大的链路带宽。
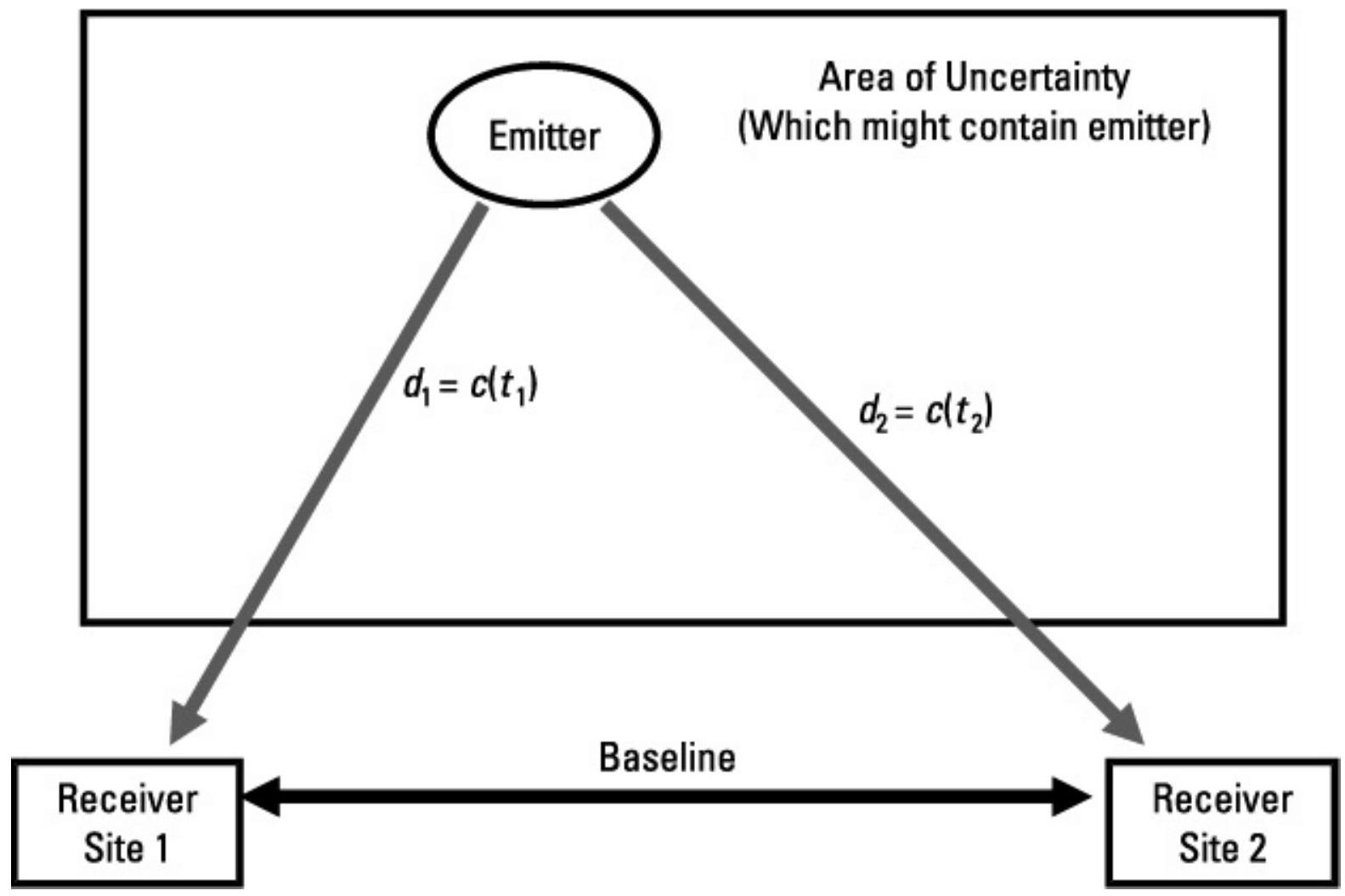
图 6.69 由于信号以光速传播,到达时间差与到两个接收站的距离差成正比。
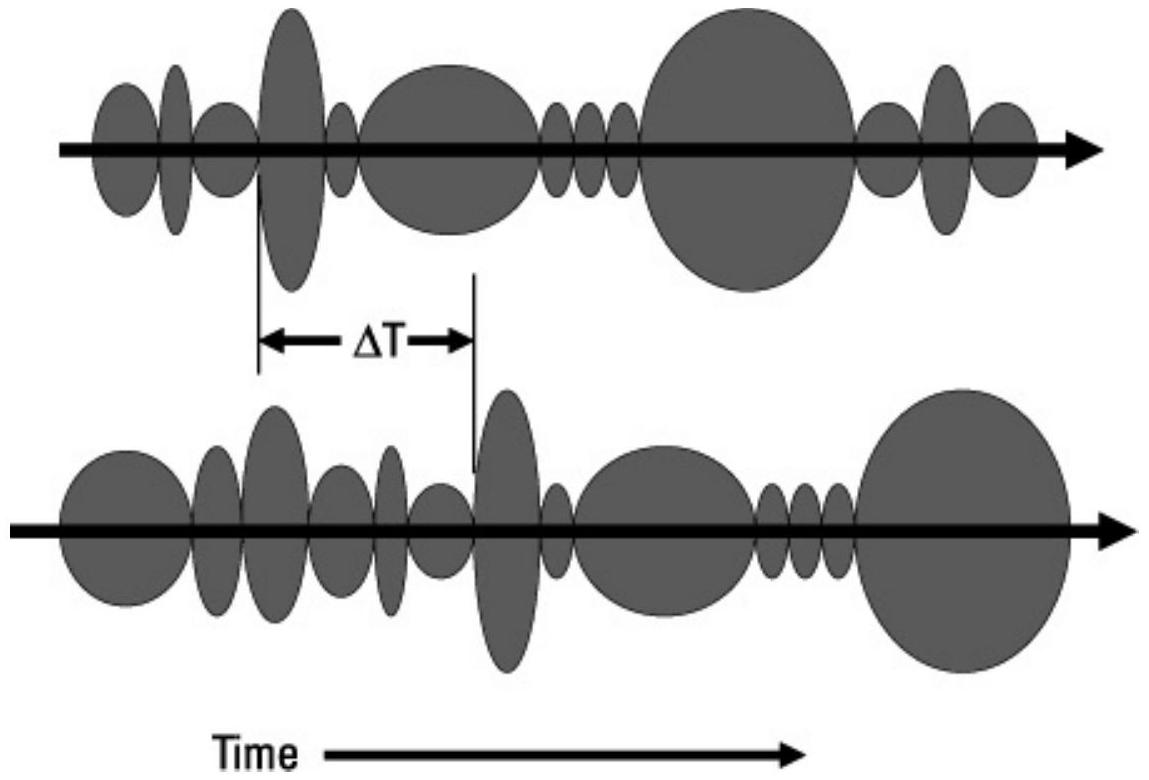
图 6.70 在两个远距离站点接收到的单个模拟信号具有相同调制,但由于距离差而在时间上偏移。
如图 6.71 所示,当延迟等于信号在两个接收器到达时间差时,对这两个数字化信号进行相关处理将形成一个软相关峰。
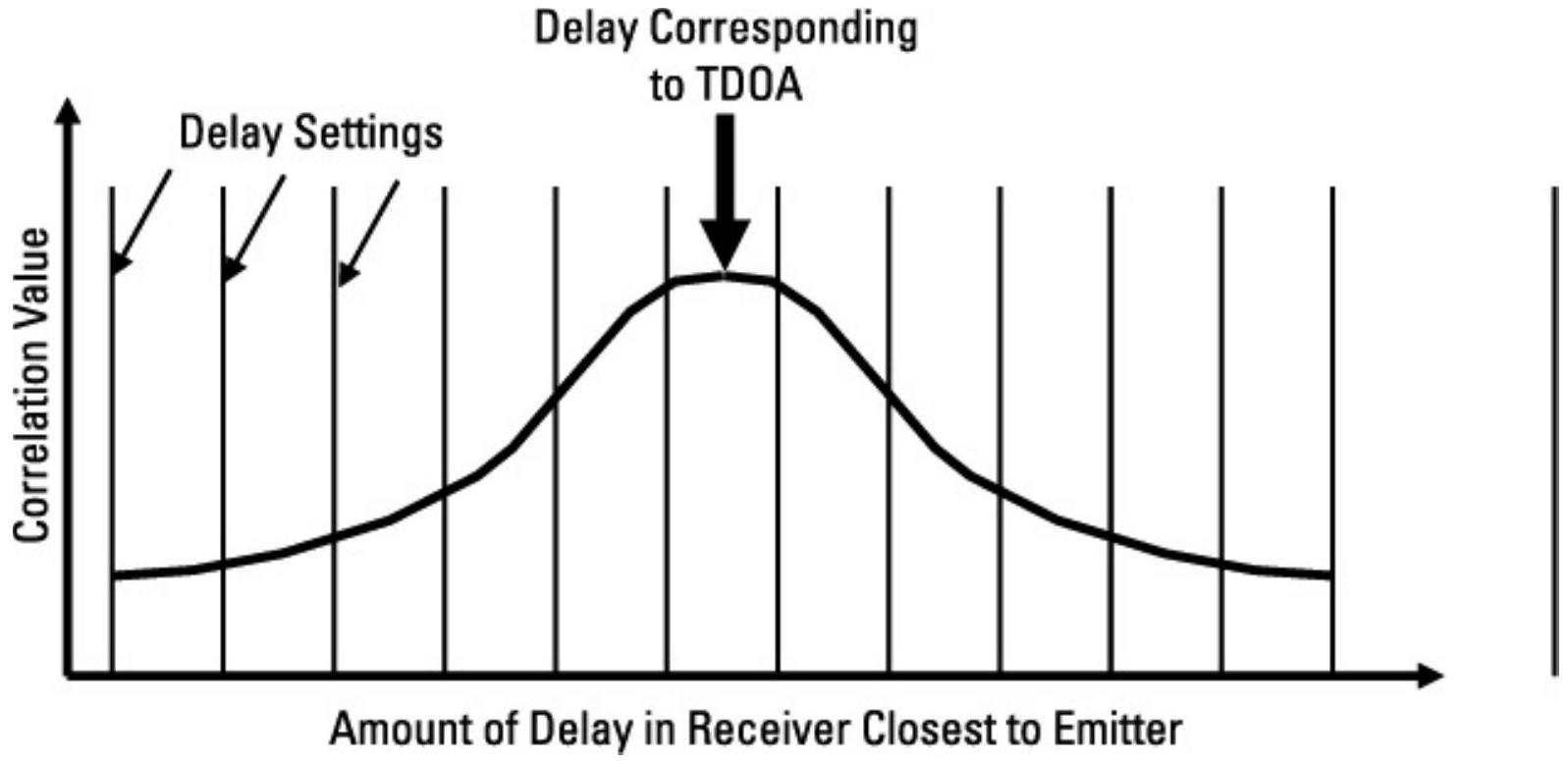
图 6.71 延迟两个接收到的模拟信号之一,当延迟等于到达时间差时,将产生软相关峰。
如果目标发射机发射数字信号,并且两个接收站能够对接收到的信号进行解调以恢复数字数据,则两个接收器输出相同的数字信号(按相对传播延迟时间偏移),因此相关可能更加精确。数字信号的自相关在相对延迟变化时形成所谓的“拇指钉相关”。当两个数字信号不同步时,相关约为 50%。当最接近发射机的接收器信号被延迟到到达时间差(在 1 位以内)时,相关度会超过 50%。当延迟适当,使两信号数据同步时,相关度上升到约 100%。这称为“拇指钉相关”,如图 6.72 所示。需要注意的是,这可能不切实际,因为它要求延迟步长小于发射比特周期。如果不确定区域(如图 6.69 所示)很大,执行相关所需时间可能会非常长,或者链路带宽会变得不切实际。
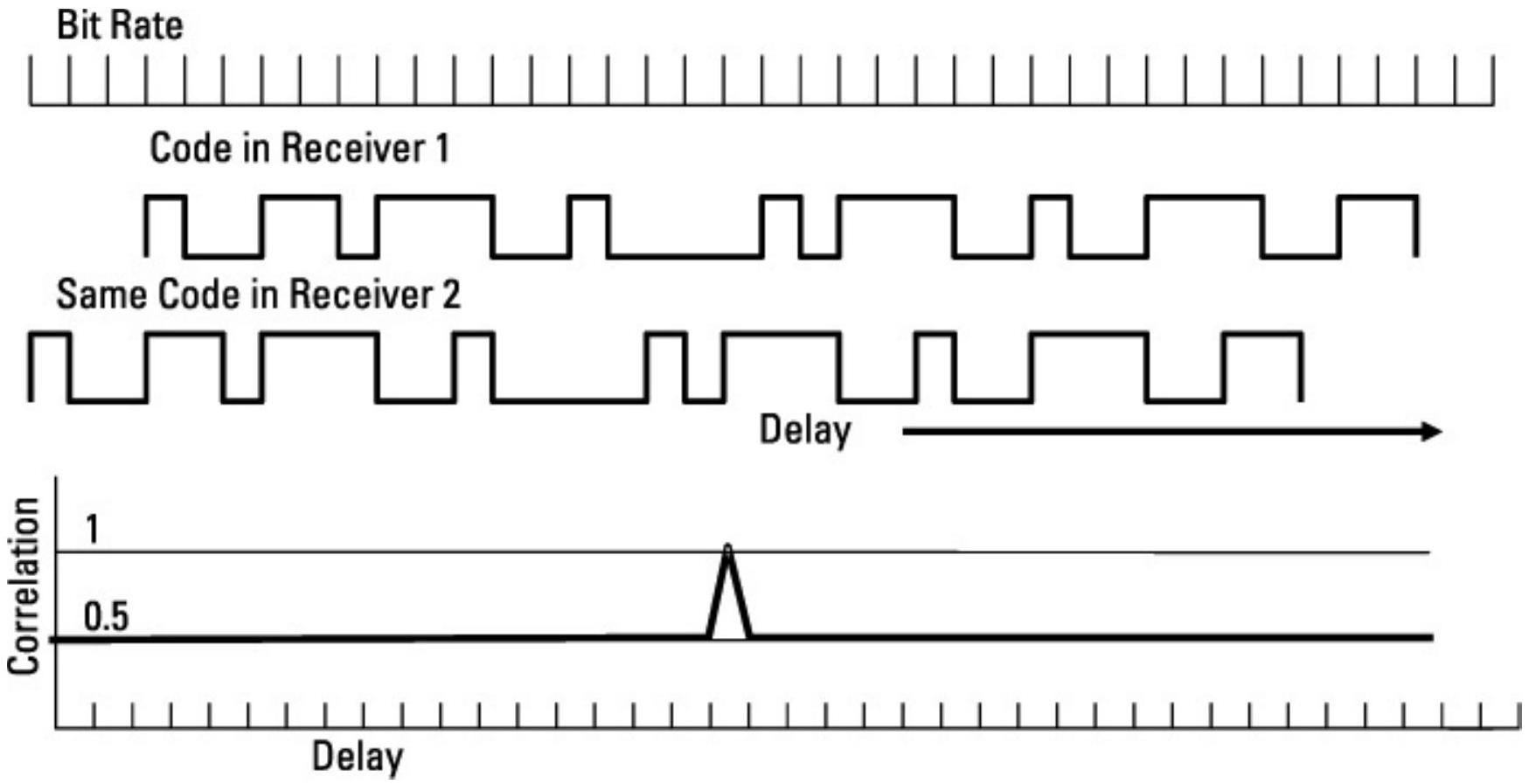
图6.72 如果两个数字信号相同,将其中一个在时间上滑动穿过另一个,当两信号同步时会产生一个尖锐的相关峰值。
6.6.19 等时线(Isochrones)¶
一旦已知时间差,就可以确定距离差。固定的距离差在空间中定义了一个双曲面。该曲面与地球(假设为平面地球)相交,形成双曲形的定位等高线,称为等时线。现在已知发射源位于该双曲线上。如果时间差测量非常精确,发射源将非常接近这条线(误差在几十米量级),但该线在长度上是无限的。图 6.73 显示了一组等时线,每条对应不同的 TDOA。
信号的实际位置是通过使用第三个接收站确定的,如图 6.74 所示。每对接收站形成一条基线,每条基线定义一条等时线。图中所示的两条基线产生的等时线在发射源位置交叉。实际上,还有第三条基线(由接收器 1 和 3 形成),它将定义第三条等时线,与前两条在发射源位置交叉。
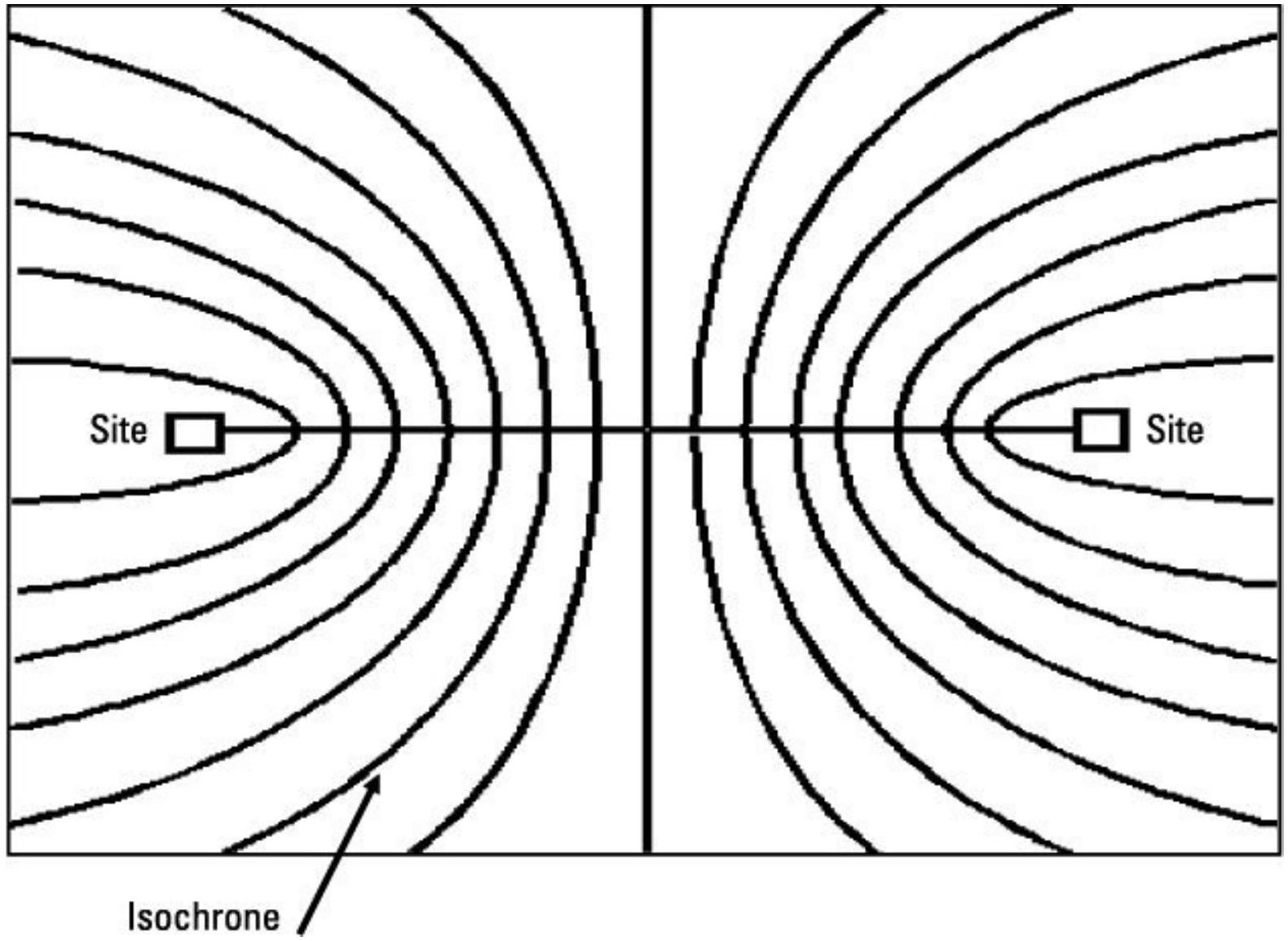
图 6.73 每个时间差值都会生成一条可能位置的双曲轨迹,称为等时线。
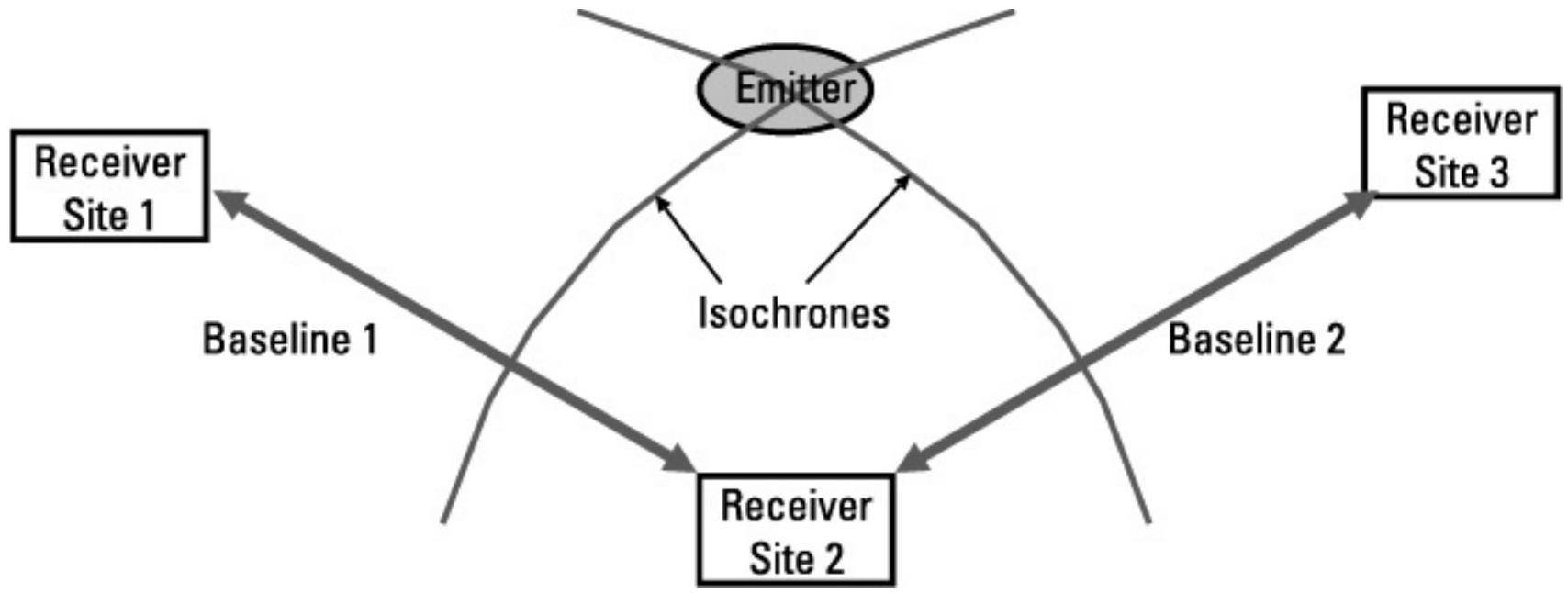
图 6.74 目标发射源位于两条基线生成的等时线交点处。
6.6.20 频率差到达(FDOA)¶
该技术需要移动平台,主要用于对地面固定发射源进行定位。
当发射机或接收机任一方移动时,接收到的信号频率将不同于发射频率。这里我们考虑固定发射机和移动接收机。由多普勒频移引起的频率差由公式确定:
其中 \(\Delta F\) 是接收信号相对于发射频率的变化减去多普勒频移,\(F\) 为发射频率,\(V\) 为移动接收机的速度大小,\(\theta\) 为接收机速度矢量与信号到达方向(DOA)之间的真实球面角,\(c\) 为光速。
图 6.75 显示了两个移动接收器,它们接收同一信号。每个接收器接收到的频率由其速度矢量和目标信号的到达方向决定。两个移动接收器形成一条基线。每个接收器接收到的频率为发射频率加上相应的多普勒频移(\(F+\Delta F\))。FDOA 为两个接收频率之间的差值。
对于任意频率差到达,存在一条复杂的曲面轨迹,它包含所有可能产生测量频率差的发射源位置。如果目标发射源在地球表面,该曲面在地表上形成一条可能的发射源位置曲线。
由于两个接收器可以具有任意速度矢量(即任意方向的任意速度),该曲线的形状可能非常多样。为了便于理解,图 6.76 针对一个特殊情况绘制:两个接收器以相同速度沿相同方向运动,虽然不一定是尾随追踪。该图显示了一组频率差值曲线,称为等频线(isofreqs),有时也称为等多普勒线(isoDopps)。每条等频线对应一个特定 FDOA 的可能发射源位置轨迹。如果发射源位置如图所示,系统只知道它位于由接收器 1 和 2 构成的基线 FDOA 指示的等频线上的某处。
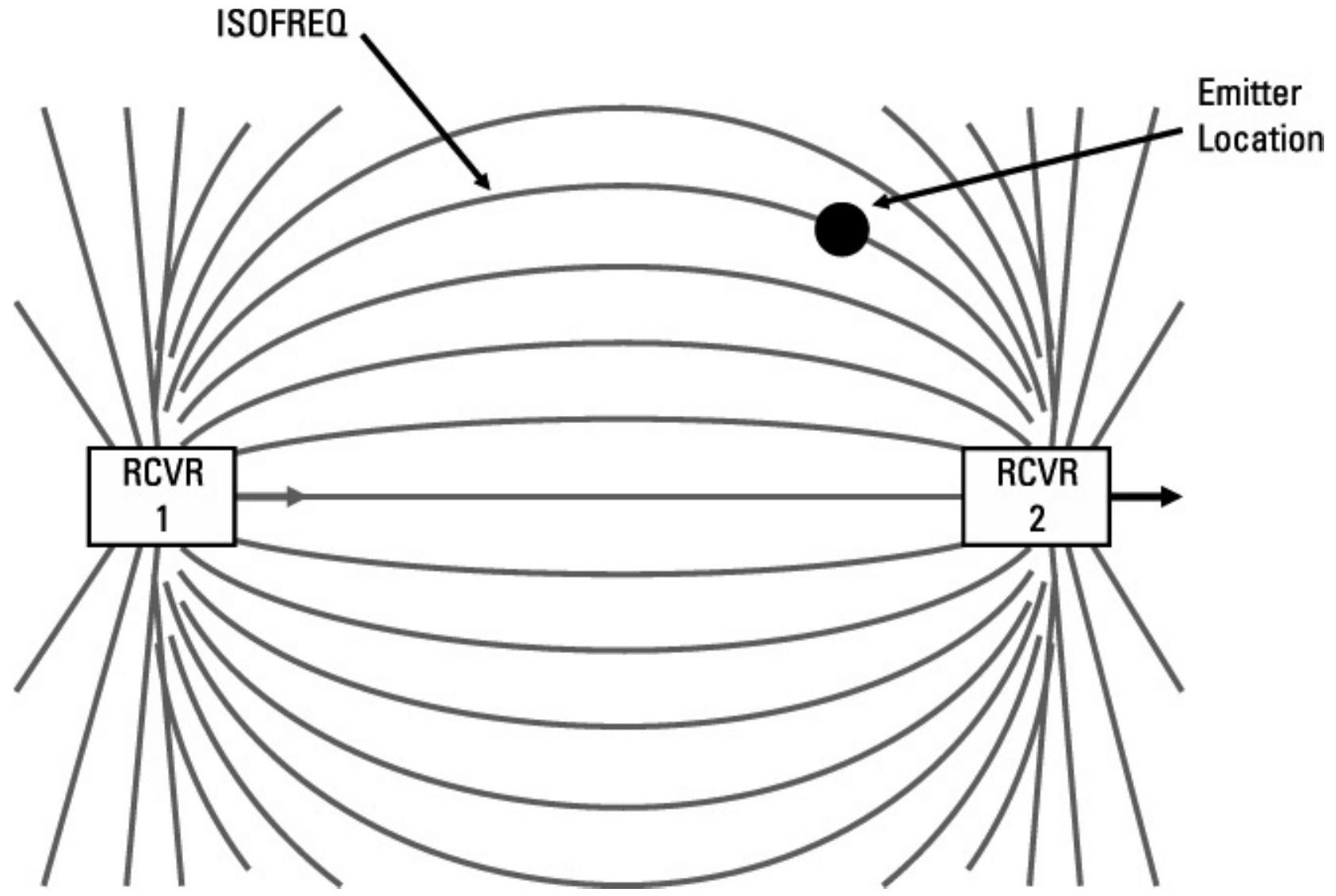
图 6.75 每个频率差到达定义一条等高线,其中包含发射源位置。
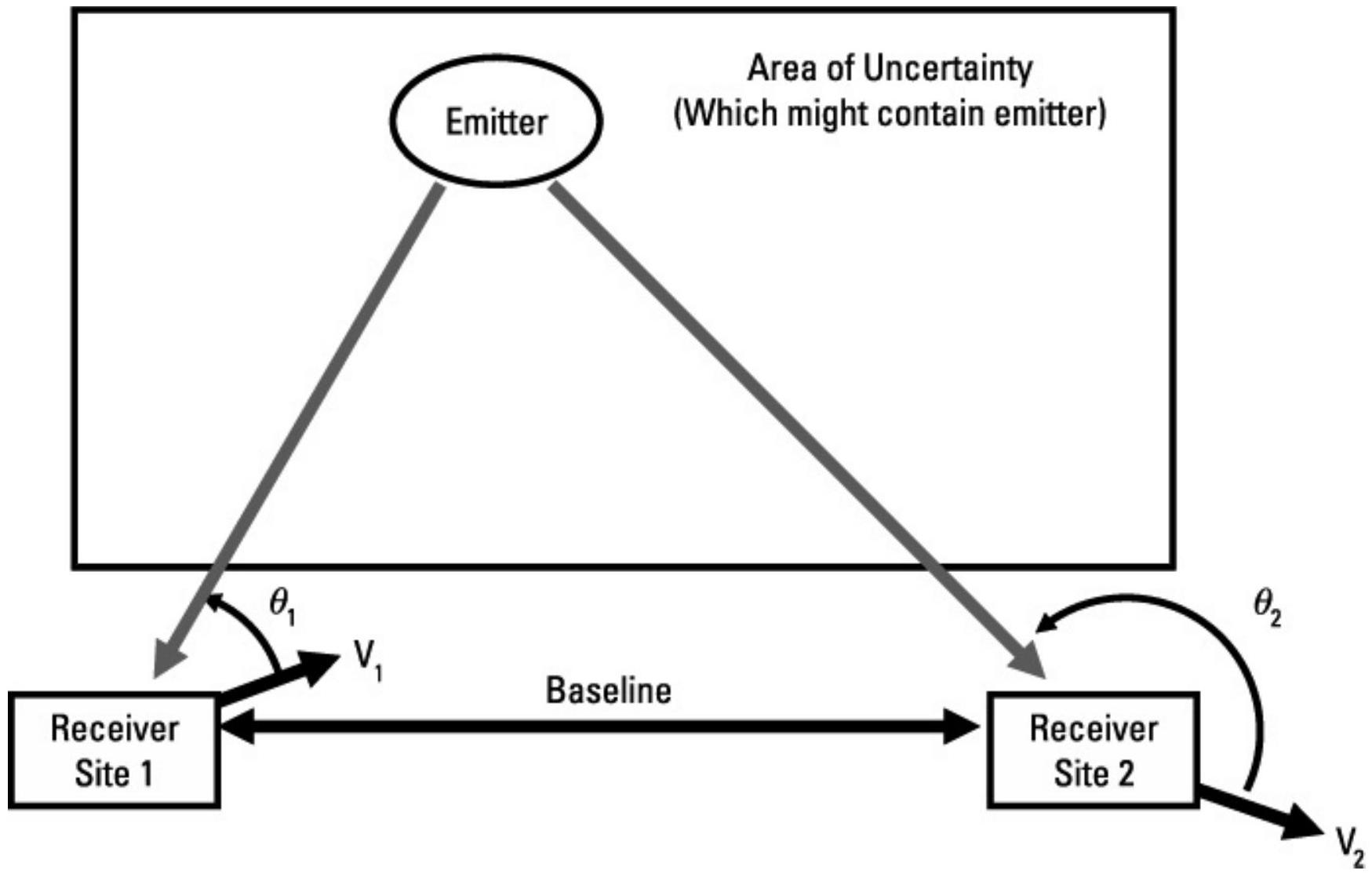
图 6.76 两个移动平台上的接收器将根据平台速度矢量接收到不同频率的信号。
为了确定实际的发射源位置,需要增加第三个移动接收器,如图 6.77 所示。这样,由接收器 2 和 3 形成第二条基线,可以计算第二条等频线。第二条等频线将在发射源位置与第一条等频线交叉。与 TDOA 方法类似,实际上还存在由接收器 1 和 3 形成的第三条基线,它产生第三条等频线穿过发射源位置。
6.6.21 频率差测量¶
FDOA 系统仅测量每个接收器位置接收到的信号频率。这需要极其精确的频率参考,以前通常依赖铯原子束钟,但现在可以使用 GPS 接收机输出的频率参考。与 TDOA 不同,不需要执行耗时的相关处理;频率只需在每个位置测量并相减即可完成。这可以通过连接三个接收器平台到执行 FDOA 计算位置的较窄数据链路实现。

图 6.77 发射源位置由两条基线生成的等频线交点确定。
然而,如果发射源本身在移动,其运动将产生与三个接收器运动造成的多普勒频移相似的频率变化。因此,很难确定正确的等频线轮廓。除非有大量移动接收器(每个都测量接收频率)并具备非常强大的处理能力,否则对移动目标发射源执行 FDOA 可能是不切实际的。
6.6.22 TDOA 与 FDOA¶
与 TDOA 接收机类似,FDOA 接收机的关键要素是具备极其精确的时间/频率参考。随着 GPS 的广泛应用,这一技术可以在小型移动平台上实现。这意味着 TDOA 和 FDOA 通常在接收机安装在直升机或固定翼飞机上时进行。如图 6.78 所示,每条基线都可以计算等时线(isochrone)和等频线(isofreq)轮廓。这意味着每条基线可以通过等时线与等频线的交点确定发射机的位置。
由于通常有三个接收平台,因此会形成三条基线,从而在发射机位置上定义六条轮廓(3 条等时线和 3 条等频线)。额外的测量参数能够提供比单独使用 TDOA 或 FDOA 更高的定位精度。
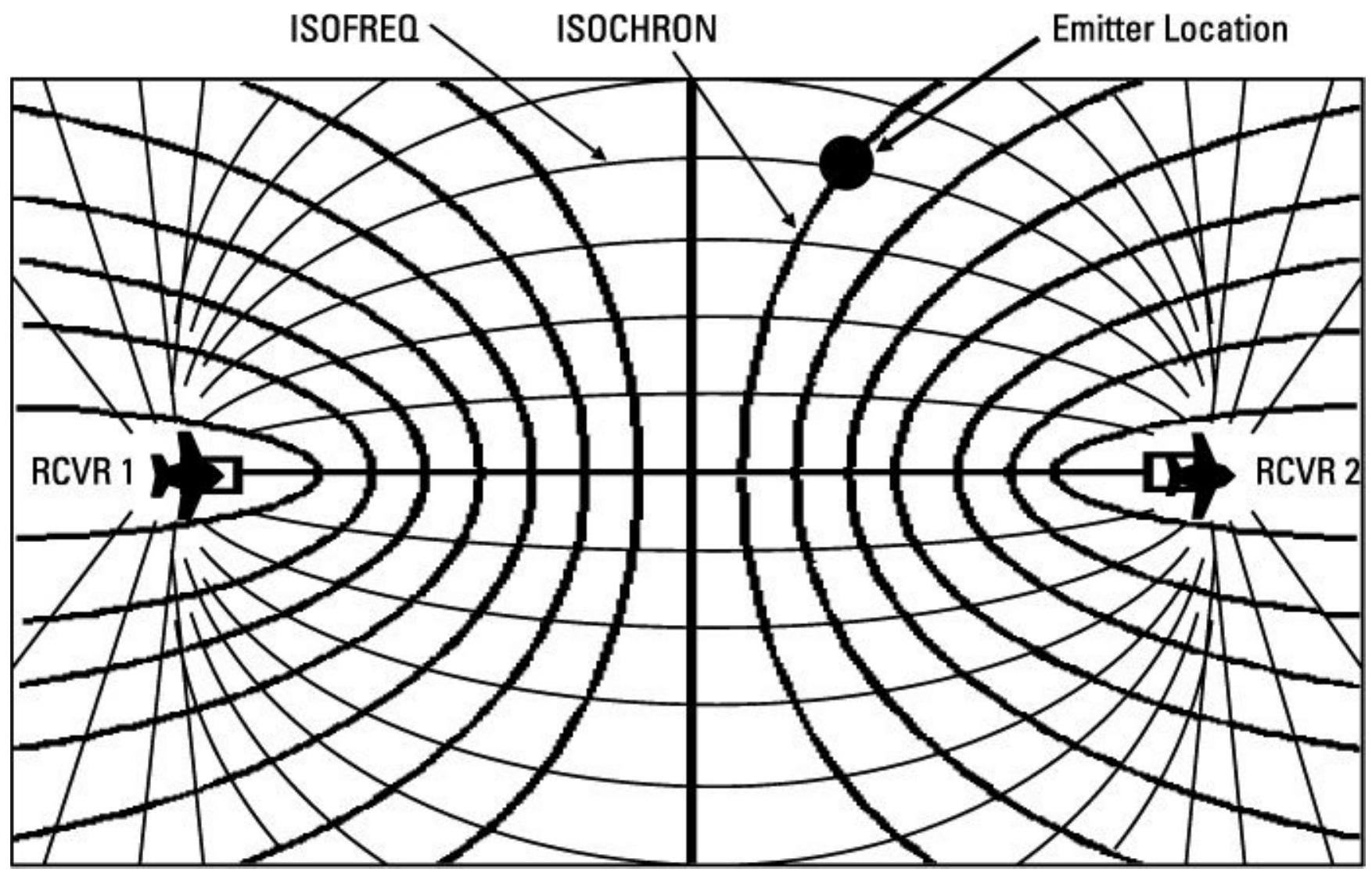
图 6.78 如果两个移动平台同时确定到达时间差和频率差,则可以定义等时线和等频线。
6.6.23 TDOA 和 FDOA 发射机定位系统的 CEP 计算¶
精密发射机定位系统的椭圆误差概率(EEP)绘制在以计算得到的发射机位置为中心的地图上。这不仅描述了计算出的发射机位置,还反映了对位置精度的置信度。如所有发射机定位方法一样,EEP 是一个椭圆,其包含实际发射机位置的概率为 \(50\%\)。\(90\%\) EEP 的概率为 \(90\%\)。然而,在比较不同发射机定位方法时,重要参数是 CEP 或 \(90\%\) CEP。如前所述,CEP 与 EEP 的关系公式为:
其中 \(a\) 和 \(b\) 分别为 EEP 椭圆的长半轴和短半轴。
6.6.24 给出 TDOA 和 FDOA 精度封闭形式公式的参考文献¶
参考文献 [2] 给出了封闭形式公式,用于计算由 TDOA 发射机定位系统生成的等时线以及由 FDOA 发射机定位系统生成的等频线的 1 标准差(\(1 \sigma\))宽度,并考虑了各种误差来源。
图 6.79 所示的 \(\pm 1 \sigma\) 线定义了等时线或等频线的宽度,即实际线路的不确定性。在正态分布函数(即误差量)中,\(1 \sigma\) 是指有 \(34.13\%\) 的概率答案更接近正确值。因此,实际发射机位置有 \(68.26\%\) 的概率位于 \(\pm 1 \sigma\) 线之间。在图 6.80 中,来自两条基线的等时线或等频线在计算得到的发射机位置交叉。两条基线的 \(\pm 1 \sigma\) 线形成一个平行四边形,该平行四边形有 \(46.59\%\) 的概率包含实际发射机位置(假设误差函数为高斯分布)。
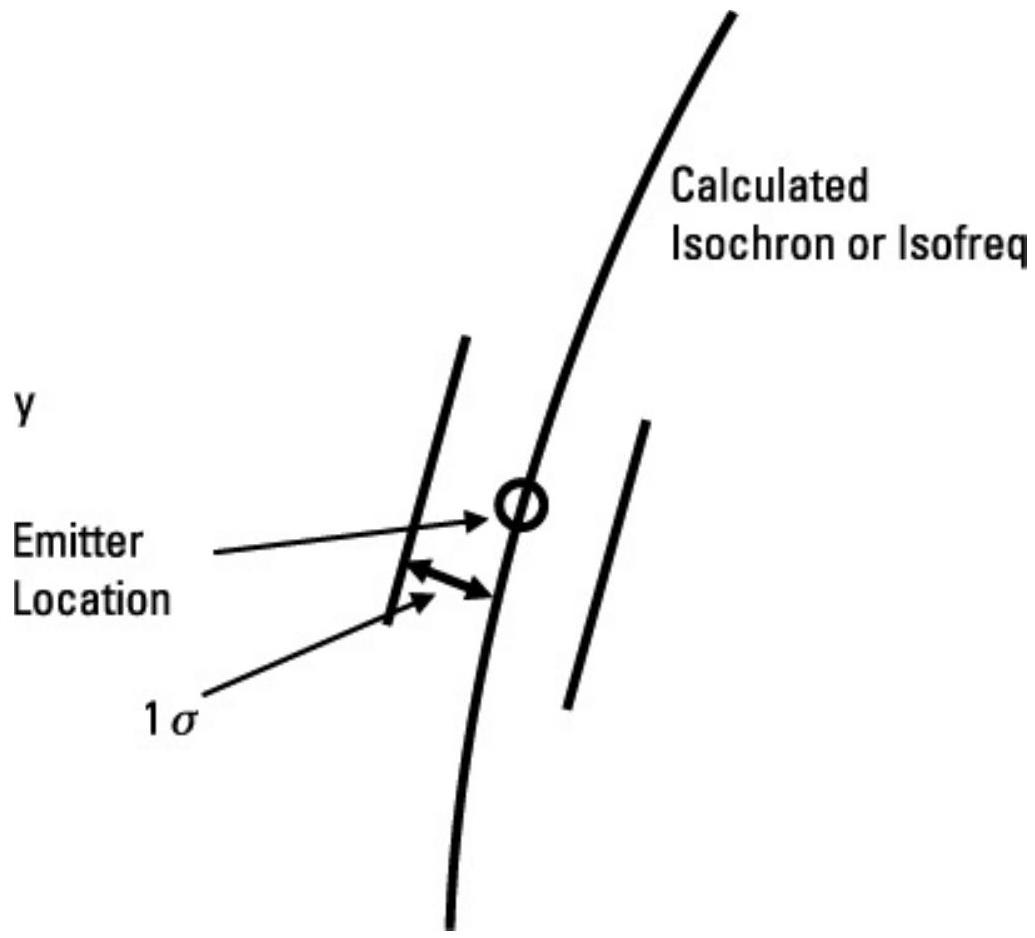
图 6.79 等时线或等频线的“宽度”通常定义为从计算曲线向两侧偏移的 \(\pm 1 \sigma\) 轮廓间的间隔。
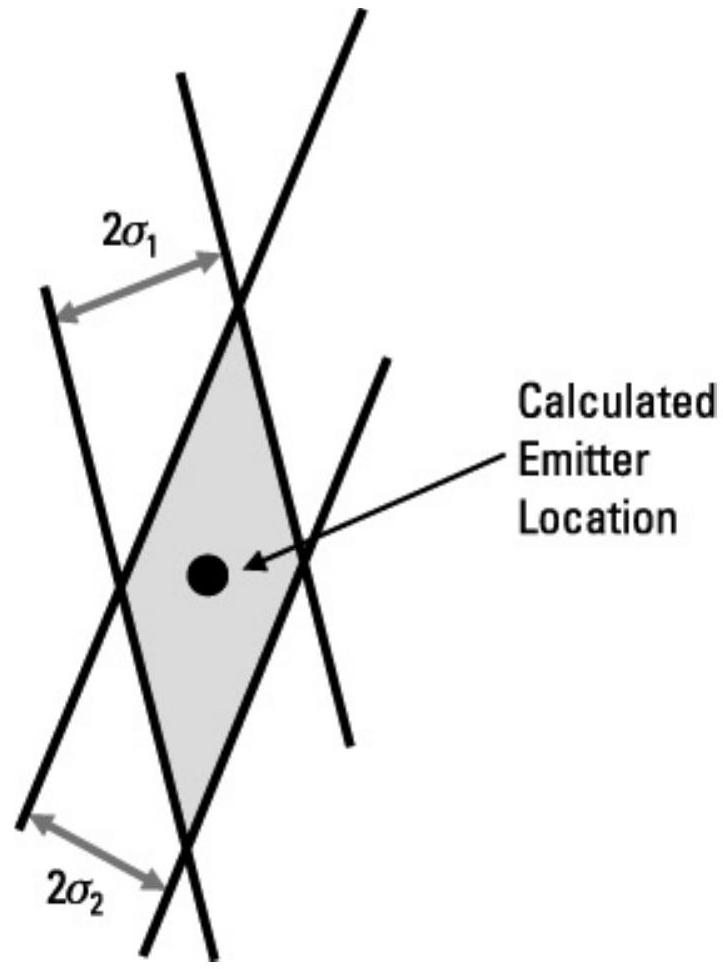
图 6.80 来自两条基线的 \(\pm 1 \sigma\) 误差线形成一个平行四边形。
如果绘制一个与平行四边形方向一致的椭圆,但定义一个包含实际发射机位置概率为 \(50\%\) 的区域,如图 6.81 所示,这将是 EEP。
仅使用几何误差源计算 CEP 的公式也在文献 [3] 中讨论,并提供了从截距几何定义平行四边形的方法。EEP 椭圆尺寸与 CEP 之间的关系见文献 [4]。
6.6.25 散点图¶
确定 TDOA 或 FDOA 发射机定位系统 EEP 和 CEP 的更精确方法是,在计算机上基于截获几何多次(例如 1,000 次)运行定位计算。在每次计算中,各变量的数值根据其概率分布随机选择(例如,高斯分布,具有某一标准差)。对于每次计算,将计算得到的位置相对于正确发射机位置绘制出来。然后以实际发射机位置为中心绘制一个椭圆,使其包含 50%(或 90%)的绘制位置点。图 6.82 展示了这样一个 EEP。
6.6.26 LPI 发射机的精密定位¶
低截获概率(LPI)发射机的精密定位存在显著问题,这将在第 7 章中讨论。
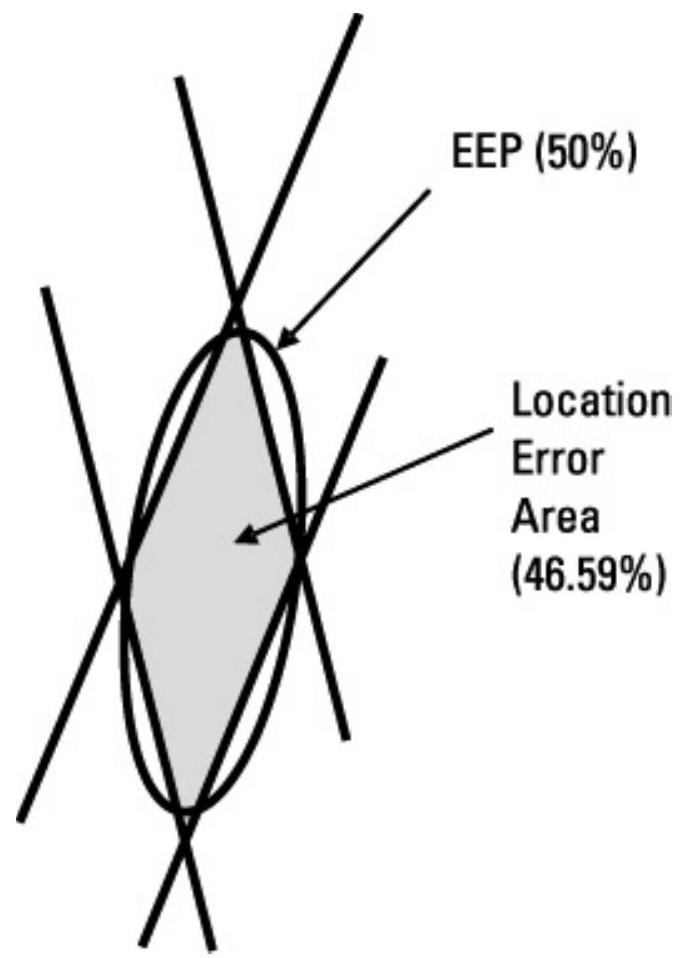
图 6.81 与平行四边形方向一致,面积为平行四边形 1.073 倍的椭圆即为 EEP。

图 6.82 许多模拟 TDOA 或 FDOA 测量中带有正态分布误差值的绘制位置形成椭圆图案。包含 50% 测量结果的椭圆即为 EEP。
6.7 通信干扰¶
通信的目的是将信息从一个地点传送到另一个地点。因此,通信干扰的目的就是阻止敌方信息到达预定地点。图 6.83 展示了一个通信干扰场景。存在从发射机到接收机的期望信号链路,以及从干扰机到接收机的干扰链路。期望信号发射功率 (\(P_{S}\)) 与期望信号天线在接收机方向上的增益 (\(G_{S}\)) 相结合,形成期望信号有效辐射功率 \(\left(E R P_{S}\right)\)。期望信号发射机到接收机的距离 (\(d_{S}\)) 用于计算传播损耗。\(P_{J}, G_{J}, E R P_{J}\) 和 \(d_{J}\) 是干扰链路的对应参数。与任何干扰一样,通信干扰通过使接收机接收到不期望的信号,从而无法正确接收期望信号来实现。图中每条链路都是前文描述的通信链路。期望信号链路的接收功率称为 \(S\),其计算公式为:
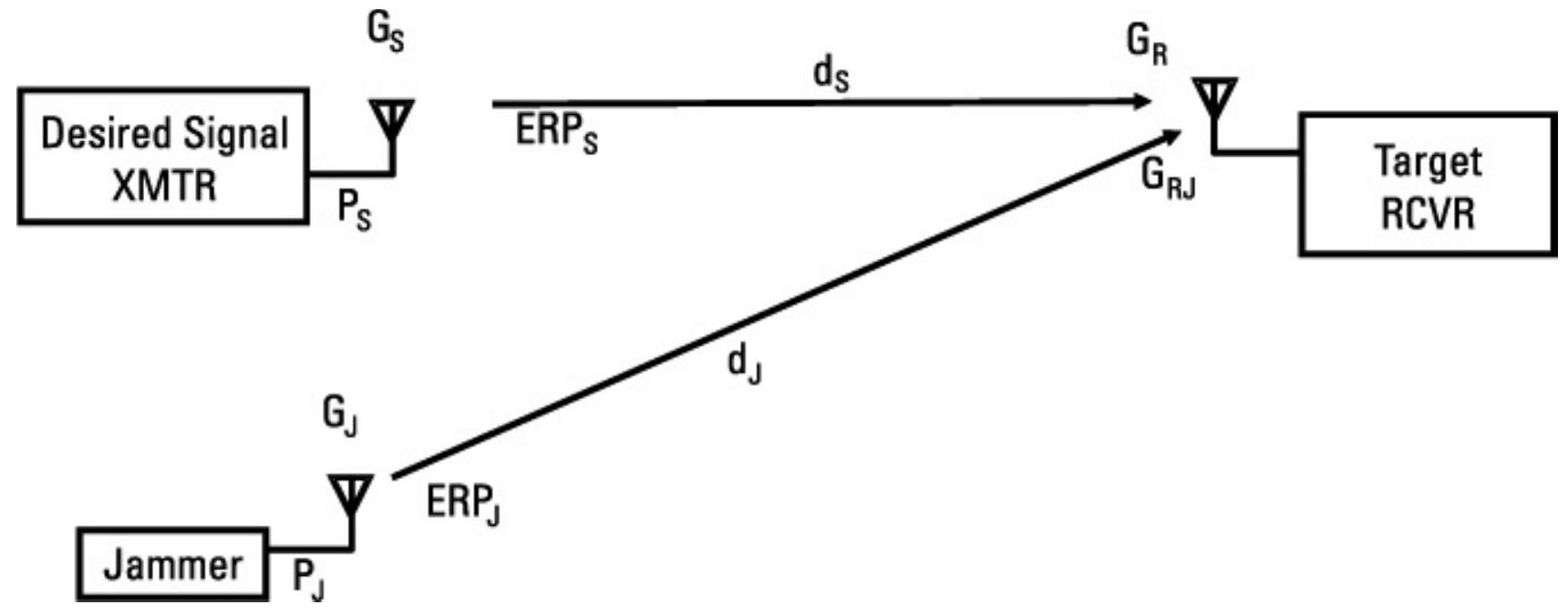
图 6.83 通信干扰场景包括从期望信号发射机到接收机的期望信号链路以及从干扰机到接收机的干扰链路。
其中 \(S\) 为接收机接收的期望信号功率(单位 dBm),\(E R P_{S}\) 为期望信号发射机在接收机方向上的有效辐射功率(单位 dBm),\(L_{S}\) 为期望信号发射机与接收机之间的链路损耗(单位 dB),\(G_{R}\) 为接收机在期望信号方向上的天线增益(单位 dB)。
干扰信号接收功率称为 \(J\),其计算公式为:
其中 \(J\) 为接收机接收的干扰信号功率(单位 dBm),\(E R P_{J}\) 为干扰机在接收机方向上的有效辐射功率(单位 dBm),\(L_{J}\) 为干扰机与接收机之间的链路损耗(单位 dB),\(G_{R J}\) 为接收机在干扰机方向上的天线增益(单位 dB)。
每条链路的损耗包括第 6.4 节和第 5 章中讨论的所有因素:
- 视距(LOS)或双径传播损耗;
- 大气损耗;
- 雨衰;
- KED(键控扩展损耗)。
这些损耗根据各链路的实际情况应用。两条链路不必使用相同的传播模型。
6.7.1 干扰接收机¶
你总是干扰接收机,而不是发射机。这似乎很显而易见,但在复杂情况下容易混淆。在这一点上,雷达干扰是一个特别容易产生混淆的来源。雷达通常将发射机和接收机设置在同一位置(通常使用同一天线),因此希望采用反向指向的方式干扰雷达,即将干扰信号发射到发射信号源所在的位置。由于通信信号必须将发射机和接收机设置在不同位置,因此你需要记住干扰的是接收机(而不是发射机)。例如,如图 6.84 所示,当你干扰无人机(UAV)数据链时,干扰信号必须指向地面站,因为数据链将信息从无人机传输到地面站。指向无人机的干扰不会影响数据链,因为数据链是从无人机到地面站传输信息的。
6.7.2 干扰网络¶
如图 6.85 所示,当你干扰敌方通信网络时,网络中的所有敌方通信站很可能都是收发一体机,每个站都具备发射和接收功能。在按键通话网络中,一个站正在发射(因为操作员按下了发射开关),网络中的其他站则在接收模式。当干扰信号被发射到网络区域时,它将被所有处于接收模式的站接收。从干扰机到每个接收机的信号流是单向链路。每条链路都可以定义,但通常实际操作中可定义一个到网络中所有接收机的平均干扰链路。当我们讨论具体技术时,图示中会显示一个发射机、一个干扰机和一个接收机,但实际上,该接收机可能是敌方网络中任何处于接收模式的成员。因此,干扰这一典型接收机就相当于干扰整个网络。然而,如图 6.86 所示,干扰机到网络中接收站的距离可能存在显著差异。在计算网络的通信干扰参数时,必须考虑这一点。
从图中还可以看出,发射站的信号也可以被干扰机相关的接收机接收。这是一条截获链路,并将在第 7 章讨论的某些复杂干扰技术中成为重要考虑因素。
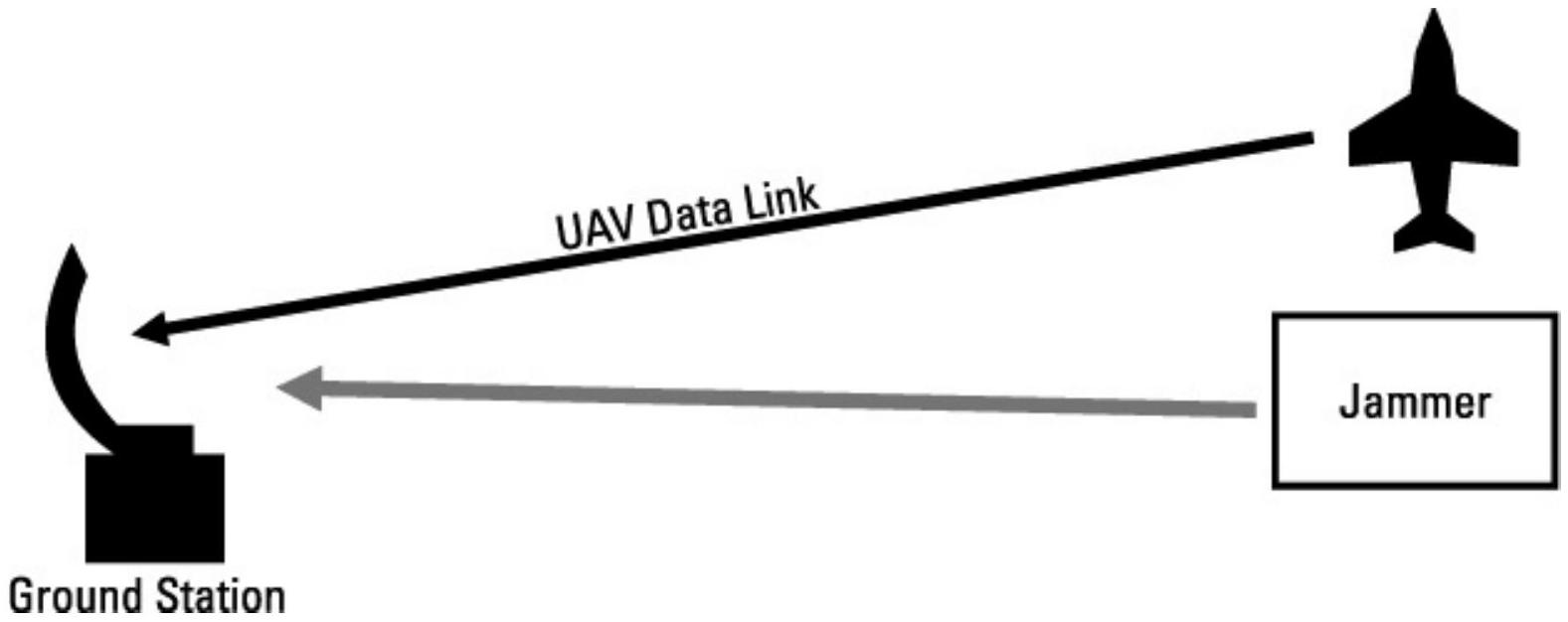
图 6.84 UAV 数据链将信息从 UAV 传输到地面站,因此干扰机必须向地面站广播以干扰该链路。

图 6.85 当干扰机干扰敌方按键通话网络时,它向网络中处于接收模式的每个收发站广播信号。干扰机所在位置的接收机也可以接收到发射站信号。
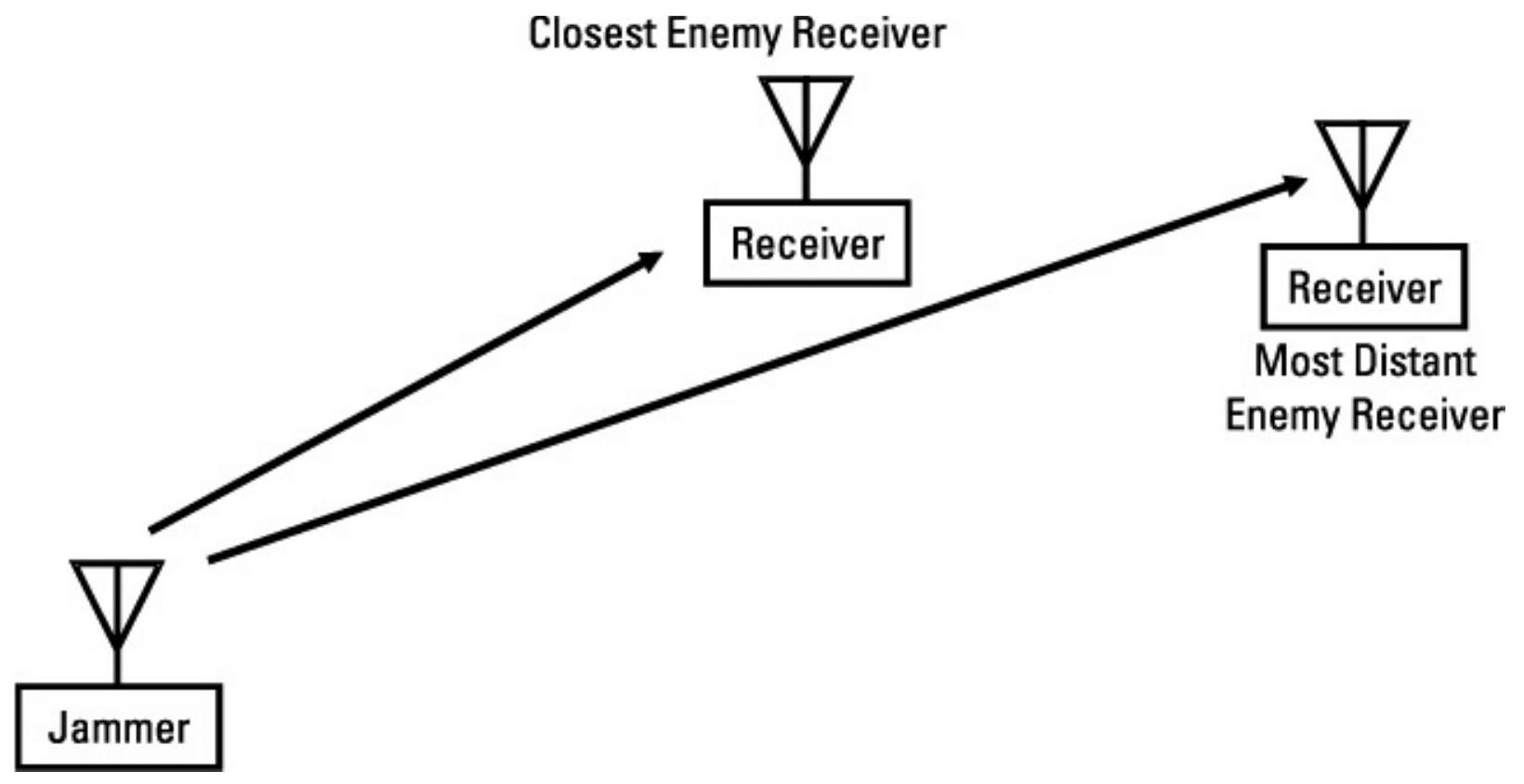
图 6.86 在干扰敌方网络时,必须考虑到干扰机到网络中最远接收成员的链路距离。
6.7.3 干扰-信号比¶
接收机中接收到的干扰信号功率与接收到的期望信号功率的比值称为干扰-信号比(\(J / S\)),以分贝表示。由于两个接收功率值都以 dBm(即对数形式)表示,\(J / S\) 可通过 \(J\) 减去 \(S\) 得到。\(J\) 和 \(S\) 按上述公式定义,因此 \(J / S\) 可进一步定义为:
其中各参数定义如上。由于通信收发机通常使用鞭状天线,它们在 \(360^{\circ}\) 方位角上几乎等效地进行发射和接收。这意味着接收天线在期望信号和干扰发射机方向上的增益相同。若两天线增益相等,\(J / S\) 公式可简化为:
6.7.4 传播模型¶
在第 6.4 节中,我们讨论了最常用来描述战术通信链路性能的三种传播模型。在第 6.7.3 节中,我们讨论了期望信号链路、截获链路和干扰链路,它们都是战术通信链路。重要的是要意识到,每条链路都可以采用任意传播模型。这也是我们在 \(J / S\) 方程中将损耗项保留为一般损耗而没有简化公式去掉公共项的原因。
由于任何链路都可能采用任意损耗模型,因此在处理通信干扰问题时,必须首先确定每条涉及链路的适用损耗模型。这涉及对几何关系的考量,并且通常需要计算每条链路的 Fresnel 区距离。对于空对空的情况,如果期望信号的发射机、接收机和干扰机都远离地面,则期望信号链路和干扰链路都为视距传播(LOS)。当干扰通信发生在微波频段并使用窄束定向天线时,这种情况通常也是成立的。然而,当问题涉及 VHF 和 UHF 的地对地或空对地干扰时,确定所需传播模型的唯一方法是计算每条链路的 Fresnel 区距离。
6.7.5 地面通信干扰¶
让我们直接进入最复杂的情况:目标通信链路和干扰机均位于地面,如图 6.87 所示。在该问题中,目标链路工作在 250 MHz 频率、传输距离 5 km,发射机功率为 1 W。发射和接收天线均为 2-dBi 鞭状天线,安装高度为 2 m。干扰机功率为 500 W,配备 12-dBi 对数周期天线,安装在 30 m 高的桅杆上,距离目标接收机 50 km。三者之间均为视距内。我们希望计算实现的 \(J / S\)。
为解决问题,第一步是计算期望信号链路和干扰链路的 Fresnel 区距离。Fresnel 区距离的公式(来自第 6.4.5 节)为:
期望信号链路的 FZ 为:
干扰链路的 FZ 为:
在每种情况下,链路距离都远大于 Fresnel 区距离,因此采用双径传播模型,如图 6.88 所示。
由于接收天线为鞭状天线,对干扰机和期望信号发射机的增益相同,因此 \(\mathrm{J} / \mathrm{S}\) 的公式为:

图 6.87 地面干扰机实现的 J/S 取决于干扰几何关系。
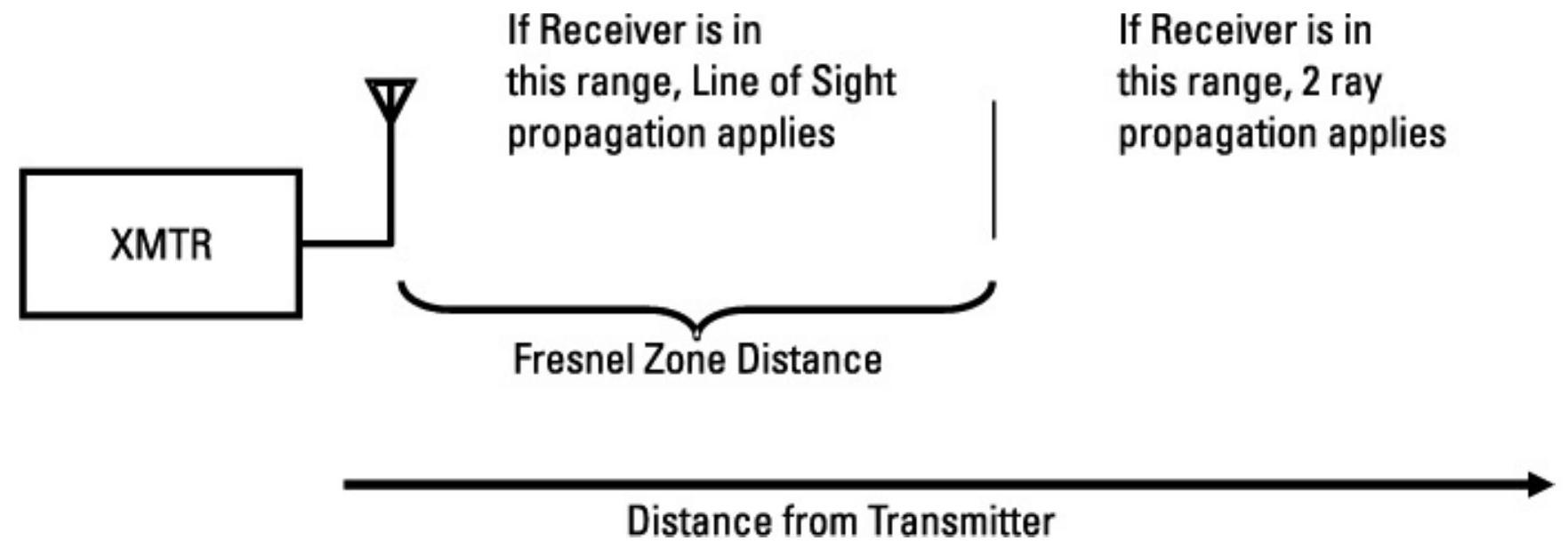
图 6.88 适用的传播模型取决于链路距离与 Fresnel 区距离的关系。
干扰机的 ERP 为:
期望信号发射机的 ERP 为:
任一链路的双径损耗为(来自第 6.4.2 节):
干扰链路的损耗为:
期望信号链路的损耗为:
因此,\(J / S\) 为:
6.7.6 公式简化¶
如果你在处理一系列问题时已知期望信号链路和干扰链路均为双径传播,可以使用 \(J / S\) 的简化公式:
其中,\(d_{J}\) 为干扰机到目标接收机的距离(公里),\(d_{S}\) 为期望信号发射机到目标接收机的距离(公里),\(h_{J}\) 为干扰机天线高度(米),\(h_{T}\) 为期望信号发射机天线高度(米),\(h_{R}\) 为目标接收机天线高度(米)。
由于接收天线对两条链路相同,公式可简化为:
6.7.7 空中通信干扰¶
现在考虑图 6.89 所示的情况。我们仍在干扰同一通信网,但干扰机现在安装在一架悬停高度为 500 m 的直升机上。干扰机仍然距离目标接收机 50 km。干扰发射机输出功率为 200 W,干扰天线现在是安装在直升机机腹的 2-dB 折叠偶极天线。此时的 \(\mathrm{J} / \mathrm{S}\) 为多少?
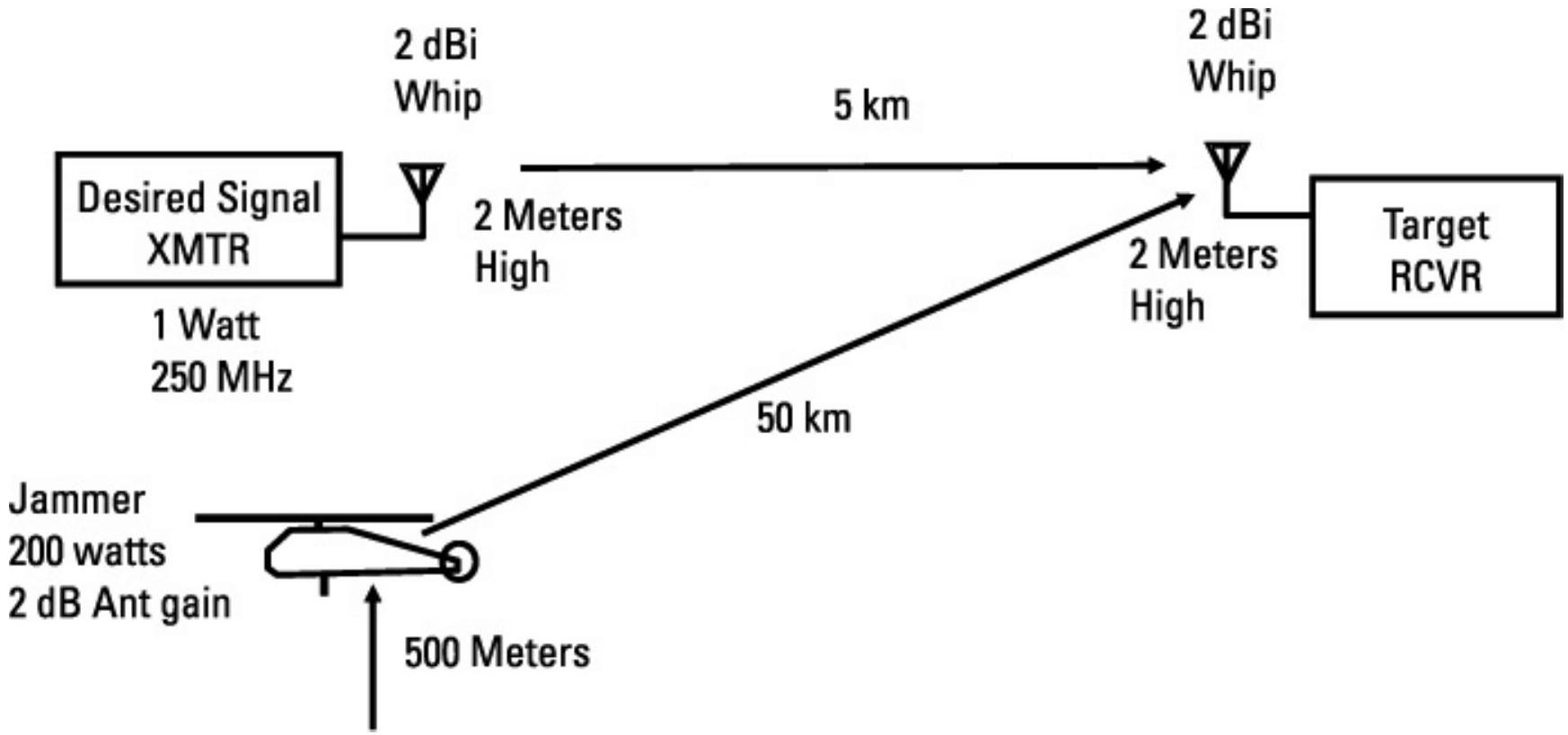
图 6.89 空中干扰机实现的 J/S 通常因干扰机高度增加而显著提高。
首先,需要确定干扰链路的 Fresnel 区距离。
由于干扰机距离接收机超过 20.8 km,干扰链路传播为双径模型。
干扰链路损耗为:
干扰机 ERP 现在为:
\(\mathrm{J} / \mathrm{S}\) 为:
由于干扰机处于高空,即使干扰机 ERP 降低了 14 dB,J/S 仍几乎提高了 10 dB。
6.7.8 高空通信干扰机¶
考虑图 6.90 所示的干扰情况。一架固定翼飞机以 \(3,000\ \mathrm{m}\) 高度飞行,对一张站间距为 5 km 的 \(250\ \mathrm{MHz}\) 通信网实施干扰。目标网内的所有站都是收发一体机,天线为 \(2\ \mathrm{m}\) 高的鞭状天线(增益 \(2\ \mathrm{dB}\))。每个收发机的发射机输出功率为 1 W。干扰飞机距离目标网所在区域 50 km,输出功率为 100 W,天线增益为 3 dBi。那么实现的 \(\mathrm{J} / \mathrm{S}\) 为多少?
首先,我们必须确定每条链路的适用传播模型。目标链路的 Fresnel 区距离为:
这远小于 5 km 的传输路径,因此目标链路适用双径传播模型。目标链路损耗为:
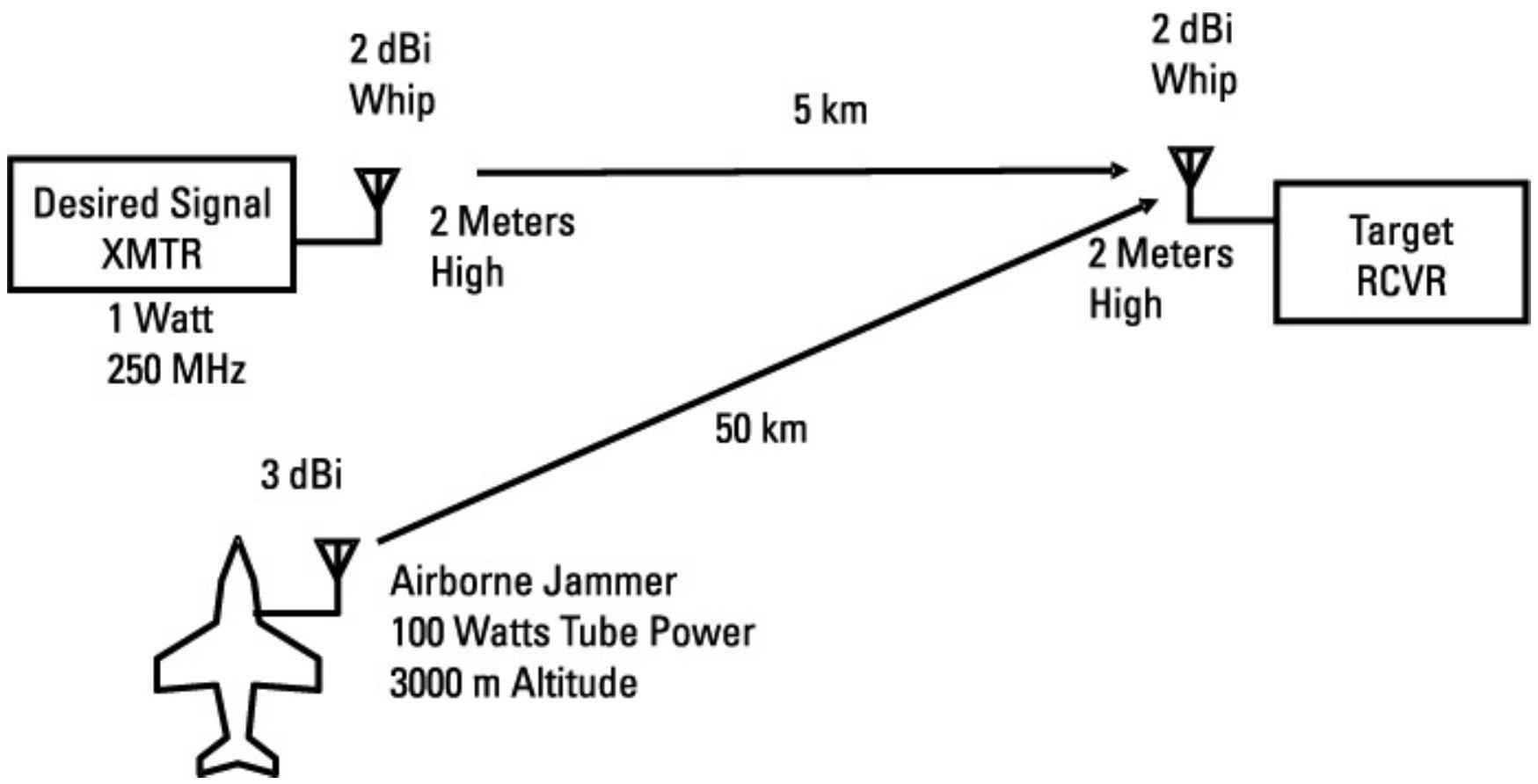
图 6.90 高空飞行干扰机可实现显著的 J/S。
干扰链路的 Fresnel 区距离为:
由于 Fresnel 区距离大于干扰链路传输距离,因此适用视距传播模型。干扰链路的损耗为:
目标链路发射机 ERP 为 30 dBm(即 1 W)\(+2\ \mathrm{dBi}=32\ \mathrm{dBm}\),
干扰机 ERP 为 50 dBm(即 100 W)\(+3\ \mathrm{dBi}=53\ \mathrm{dBm}\)。
\(\mathrm{J} / \mathrm{S}\) 为:
由于空中干扰机链路为视距传播,它能够对目标网(采用双径损耗)产生非常高的 J/S。
6.7.9 就地干扰¶
现在考虑一个就地干扰机针对上一个问题中描述的同一目标网工作。这是一种低功率干扰机,非常接近接收机。在这种情况下,目标网运行区域内可能布置了多个低功率干扰机。每个干扰机的 ERP 为 5 W,天线为 0.5 m 高的鞭状天线。图 6.91 显示了一个干扰机位于接收机 500 m 处的情况。我们将其视为典型干扰案例(即假设目标网每个收发机附近约有 500 m 的就地干扰机)。实现的 \(\mathrm{J} / \mathrm{S}\) 为多少?
如上所述,目标信号链路采用双径传播,ERP 为 32 dBm,链路损耗为 136 dB。
现在计算干扰链路的 Fresnel 区距离:
这小于 500 m 的干扰链路距离,因此适用双径传播。干扰机 ERP 为 \(37\ \mathrm{dBm}\)(5 W)。干扰链路损耗为:
\(\mathrm{J} / \mathrm{S}\) 为:
由于干扰机非常接近目标接收机,即使低功率干扰机也能实现较高的 \(\mathrm{J} / \mathrm{S}\)。

图 6.91 就地干扰可用低功率干扰机实现高 J/S。
6.7.10 干扰微波 UAV 链路¶
接下来考虑从地面对 UAV 链路进行干扰。UAV 必须具有来自控制站的指令链(上行链路)以及返回控制站的数据链(下行链路)。我们将分别讨论干扰每条链路。两条链路的工作频率均约为 5 GHz。
图 6.92 显示 UAV 指令链。控制站配备 20 dBi 抛物面天线,主瓣增益为 \(20\ \mathrm{dBi}\),旁瓣隔离为 \(15\ \mathrm{dB}\)。也就是说,平均旁瓣比主波束轴向增益低 15 dB(指向 UAV 的方向增益为主波束轴向增益)。上行链路发射机输出功率为 1 W。UAV 距地面站 20 km,配备 3 dBi 鞭状天线。下行链路发射机(UAV 上)输出 1 W 到其天线。干扰机配备 10 dBi 对数周期天线,输出 100 W 干扰功率到天线。
由于两条链路均为微波频段,因此适用视距传播。
6.7.10.1 指令链路¶
首先考虑干扰指令链路,干扰机天线指向 UAV,如图 6.92 所示。实现的 \(\mathrm{J} / \mathrm{S}\) 为多少?
目标信号 ERP 为 \(30\ \mathrm{dBm}\ (1\ \mathrm{W})+20\ \mathrm{dB}=50\ \mathrm{dBm}\)。干扰机 ERP 为 \(50\ \mathrm{dBm}\ (100\ \mathrm{W})+10\ \mathrm{dB}=60\ \mathrm{dBm}\)。
由于指令站距 UAV 20 km,指令链路损耗为:
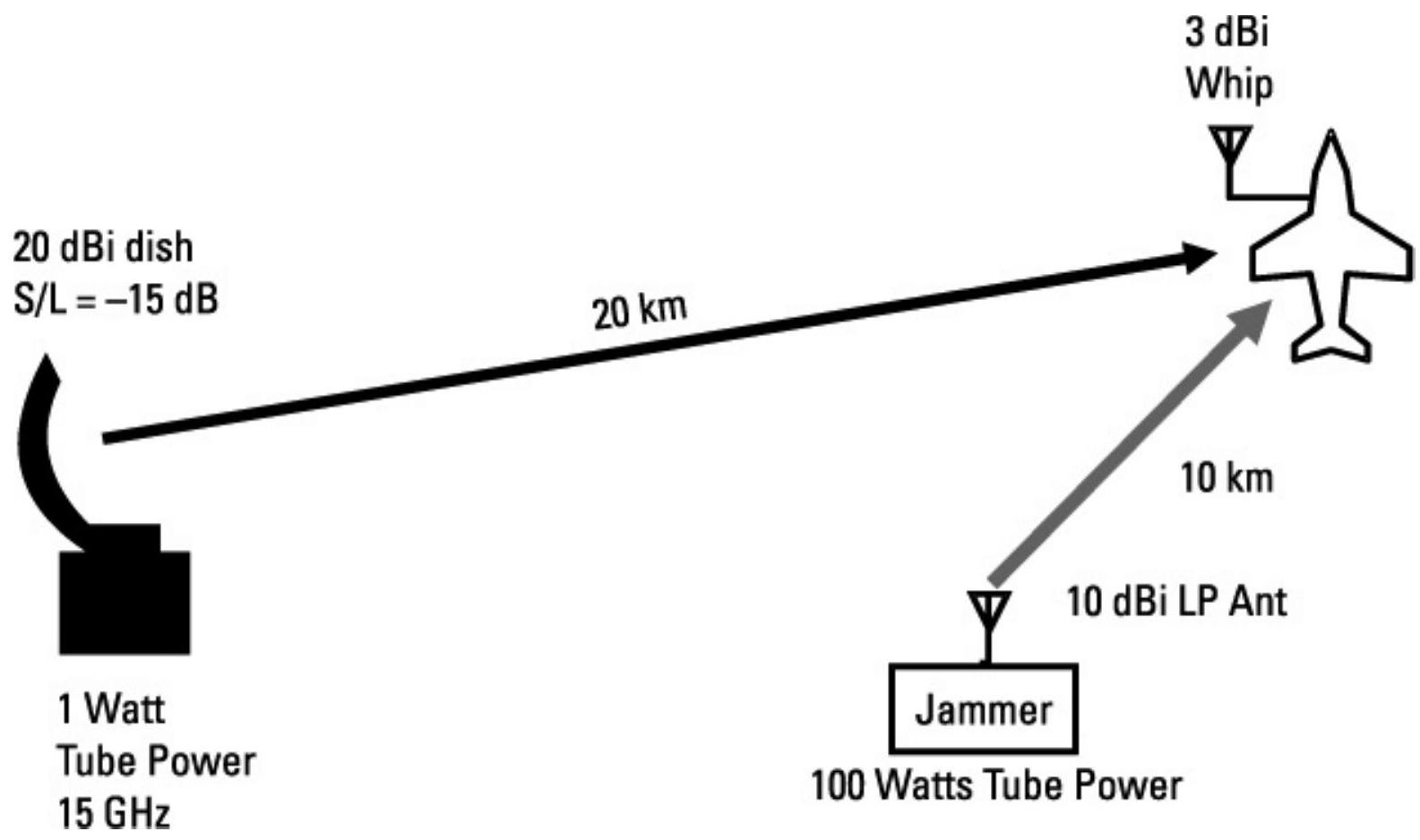
图 6.92 干扰 UAV 上行链路需要向 UAV 方向发射。
干扰机距 UAV 10 km,因此干扰链路损耗为:
由于 UAV 上的接收天线为鞭状天线,其对地面站和干扰机的增益相同。因此 \(\mathrm{J} / \mathrm{S}\) 为:
6.7.10.2 数据链路¶
现在考虑干扰数据链路,如图 6.93 所示。干扰机距控制站 20 km,其天线指向控制站天线的旁瓣。实现的 \(\mathrm{J} / \mathrm{S}\) 为多少?
数据链路发射机输出功率为 1 W,天线增益为 3 dBi。目标信号链路 ERP 为 \(30\ \mathrm{dBm}\ (1\ \mathrm{W})+3\ \mathrm{dBi}=33\ \mathrm{dBm}\)。目标信号链路损耗与指令链路相同,为 132.4 dB。
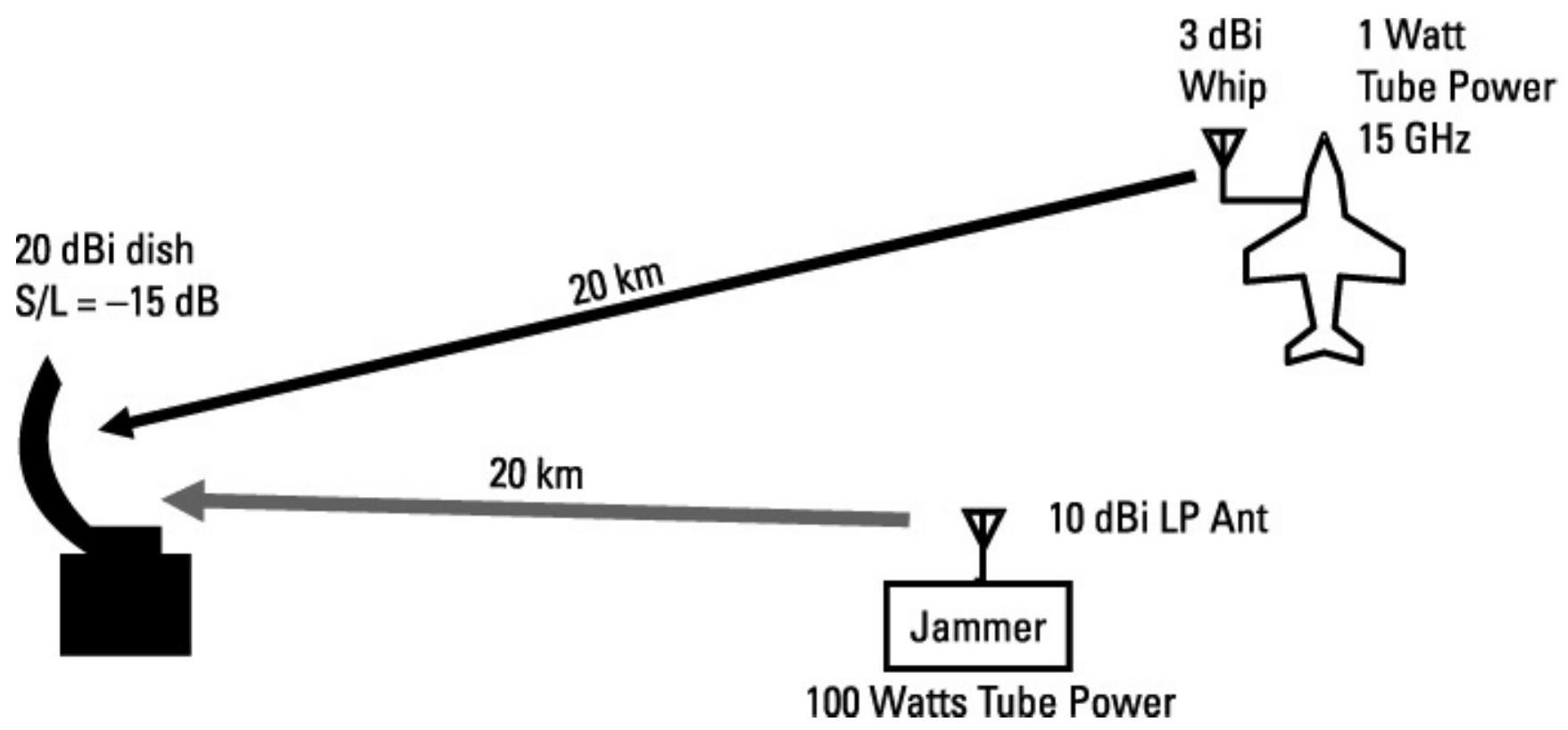
图 6.93 干扰 UAV 下行链路需要向地面站位置发射。
干扰机 ERP 如上计算为 60 dBm。由于干扰机距控制站 20 km,干扰链路损耗与目标信号损耗相同,为 132.4 dB。
控制站天线为定向天线,对 UAV 的增益 \(G_{R}\) 为 20 dBi,但其指向干扰机的增益 \(G_{RJ}\)(处于旁瓣)比主瓣低 15 dB,为 5 dBi。因此,\(\mathrm{J} / \mathrm{S}\) 为:
References¶
[1] Gibson, J. D., (ed.), Communications Handbook, Ch. 84: Boca Raton, FL: CRC Press, 1997. [2] Chestnut, P., "Emitter Location Accuracy Using TDOA and Differential Doppler," IEEE Transactions on Aerospace and Electronic Systems, Vol. 18, March 1982. [3] Adamy, D., EW 102: A Second Course in Electronic Warfare, Norwood, MA: Artech House, 2004. [4] Wegner, L. H., "On the Accuracy Analysis of Airborne Techniques for Passively Locating Electromagnetic Emitters," RAND Report, R-722-PR, June 1971.