8 观测持续时间与频率¶
在本章中,我们将首先根据卫星的轨道参数计算其能够“观测”到的覆盖距离。随后,我们将计算卫星能够持续观测该点的时间,最后计算卫星或地面接收机所接收信号的多普勒频移。这三项计算对于涉及卫星的电子战(Electronic Warfare, EW)功能应用均至关重要。所有这些计算均依赖于卫星的位置以及所考虑的地球表面点的位置。
在第6章第6.1.2节中,我们计算了位于高度为\(1,000\mathrm{km}\)的圆形轨道、周期为\(3\)小时(\(180\)分钟)、星下点(Sub-Satellite Point, SVP)位于北纬\(30^{\circ}\)、东经\(100^{\circ}\)的卫星的观测角。我们所考虑的目标位于地球表面,坐标为北纬\(45^{\circ}\)、东经\(120^{\circ}\)。
根据表8.1(该表与表3.2相同,为便于参考在此重新列出),可知该卫星的半长轴为\(10,560\mathrm{~km}\)。由于其轨道为圆形,因此其高度恒定为\(4,189 \mathrm{~km}\)。
图8.1展示了卫星及其能够观测到的地球表面区域。图中并未按比例绘制卫星高度;我们将在数学计算中处理该问题。卫星高度越高,可用于截获或干扰目标的地球表面区域就越大。
表8.1 圆形轨道的高度与半长轴随卫星周期的变化关系
| p(分钟) | h(千米) | a(千米) | p(分钟) | h(千米) | a(千米) |
|---|---|---|---|---|---|
| 90 | 281 | 6652 | 330 | 9447 | 15818 |
| 105 | 1001 | 7372 | 345 | 9923 | 16294 |
| 120 | 1688 | 8059 | 360 | 10392 | 16763 |
| 135 | 2346 | 8717 | 375 | 10854 | 17225 |
| 150 | 2980 | 9351 | 390 | 11311 | 17682 |
| 165 | 3594 | 9965 | 405 | 11761 | 18132 |
| 180 | 4189 | 10560 | 420 | 12206 | 18577 |
| 195 | 4768 | 11139 | 435 | 12646 | 19017 |
| 210 | 5332 | 11703 | 450 | 13081 | 19452 |
| 225 | 5883 | 12254 | 465 | 13510 | 19881 |
| 240 | 6422 | 12793 | 480 | 13936 | 20307 |
| 255 | 6949 | 13320 | 495 | 14357 | 20728 |
| 270 | 7466 | 13837 | 510 | 14773 | 21144 |
| 285 | 7974 | 14345 | 525 | 15186 | 21557 |
| 300 | 8473 | 14844 | 540 | 15595 | 21966 |
| 315 | 8964 | 15335 | - | - | - |
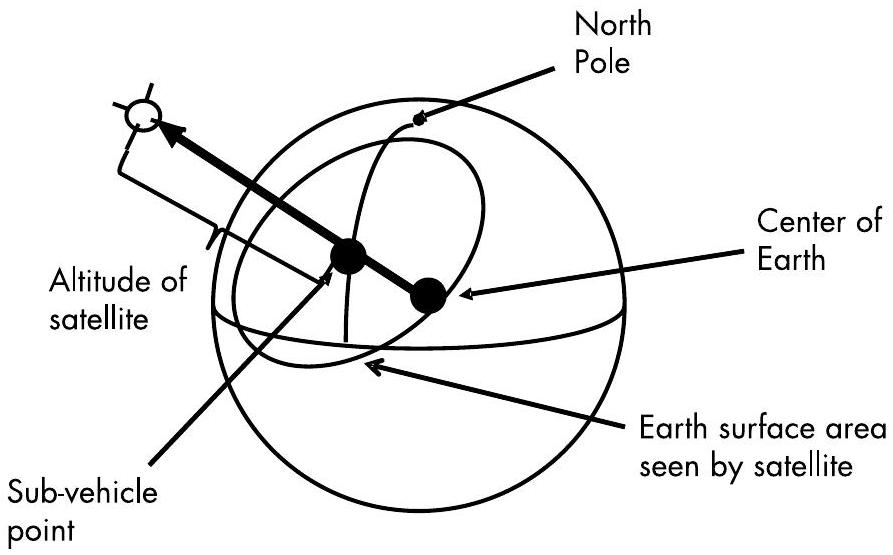
图8.1 卫星可观测的地球表面区域取决于星下点(Sub-Satellite Point, SVP)和卫星的高度。
8.1 地平线距离的计算¶
考虑图8.2。该图展示了一个平面三角形,其所在平面由卫星、地球中心以及卫星所能观测到的地球表面最远点共同确定。在所选地平线点处,当地地平线平面与地球球体相切。从地球中心指向该点的矢量与该切平面成 \(90^{\circ}\) 相交。

图8.2 从卫星到地平线的距离可通过由卫星、地平线上一点和地球中心所定义的平面三角形来确定。
与之前章节类似,我们将该三角形从图中单独提取出来,并按常规方式标注:即用大写字母表示角,对应的小写字母表示对边。
角 A 是从星下点(Sub-Satellite Point, SVP)到地平线的仰角;角B为\(90^{\circ}\);角C是从卫星指向地平线上该点的地心角(geocentric angle)。边\(a\)为地球半径;边\(b\)为从地球中心到卫星的距离(即卫星高度 + 地球半径);边\(c\)为从卫星到地平线上该点的距离。
其中,边\(a\)为地球半径(\(6,371 \mathrm{~km}\)),边\(b\)为卫星到地球中心的距离(\(10,560 \mathrm{~km}\))。
由于这是一个平面直角三角形,边\(b\)的平方等于边\(a\)与边\(c\)的平方和。因此:
这就是卫星与位于地平线上的发射机或接收机之间的传播距离。
接下来,我们可以利用平面三角形的正弦定理求解角\(C\):
根据角\(C\),我们可以确定从星下点(SVP)到地平线的地球表面距离。地球的大圆周长为\(40,030 \mathrm{~km}\)。因此,可利用以下公式计算沿大圆路径从 SVP 到地平线的地球表面距离:
从天底方向(nadir)到地平线的仰角(elevation angle)等于\(90^{\circ}\)减去我们刚刚计算出的地心角\(C\)。
现在我们可以计算到地平线的地球表面距离:
8.2 圆轨道卫星的地平线距离¶
表8.2列出了不同轨道周期(单位为分钟)的圆轨道卫星到地平线的距离。第一列为轨道周期(分钟),第二列为卫星高度(\(h\)),第三列为半长轴(\(a\))(适用于任意轨道形状),第四列为到地平线的直线距离(\(rng\),单位为千米),第五列为从星下点(SVP)到地平线的地球表面距离(\(dist\),单位为千米)。
表8.2 不同指定轨道周期的圆轨道卫星的高度、半长轴、到地平线的直线距离以及地球表面距离
| p(min) | h(km) | a(km) | rng(km) | dist(km) | p(min) | h(km) | a(km) | rng(km) | dist(km) |
|---|---|---|---|---|---|---|---|---|---|
| 90 | 281 | 6,652 | 1,914 | 1,859 | 330 | 9,447 | 15,818 | 14,478 | 7,365 |
| 105 | 1,001 | 7,372 | 3,710 | 3,359 | 345 | 9,923 | 16,294 | 14,997 | 7,447 |
| 120 | 1,688 | 8,059 | 4,935 | 4,198 | 360 | 10,392 | 16,763 | 15,505 | 7,523 |
| 135 | 2,346 | 8,717 | 5,950 | 4,785 | 375 | 10,854 | 17,225 | 16,004 | 7,593 |
| 150 | 2,980 | 9,351 | 6,845 | 5,232 | 390 | 11,311 | 17,682 | 16,494 | 7,658 |
| 165 | 3,594 | 9,965 | 7,662 | 5,587 | 405 | 11,761 | 18,132 | 16,976 | 7,719 |
| 180 | 4,189 | 10,560 | 8,422 | 5,880 | 420 | 12,206 | 18,577 | 17,451 | 7,776 |
| 195 | 4,768 | 11,139 | 9,137 | 6,127 | 435 | 12,646 | 19,017 | 17,918 | 7,830 |
| 210 | 5,332 | 11,703 | 9,817 | 6,339 | 450 | 13,081 | 19,452 | 18,379 | 7,880 |
| 225 | 5,883 | 12,254 | 10,467 | 6,523 | 465 | 13,510 | 19,881 | 18,833 | 7,928 |
| 240 | 6,422 | 12,793 | 11,093 | 6,685 | 480 | 13,936 | 20,307 | 19,281 | 7,973 |
| 255 | 6,949 | 13,320 | 11,698 | 6,829 | 495 | 14,357 | 20,728 | 19,724 | 8,016 |
| 270 | 7,466 | 13,837 | 12,284 | 6,958 | 510 | 14,773 | 21,144 | 20,162 | 8,056 |
| 285 | 7,974 | 14,345 | 12,853 | 7,075 | 525 | 15,186 | 21,557 | 20,594 | 8,095 |
| 300 | 8,473 | 14,844 | 13,408 | 7,180 | 540 | 15,595 | 21,966 | 21,021 | 8,131 |
| 315 | 8,964 | 15,335 | 13,949 | 7,277 | — | — | — | — | — |
8.3 从卫星视角计算目标可探测持续时间¶
在第8.1节中,我们讨论了卫星可观测到的地球区域。现在我们将讨论一些与时间相关的问题。这一问题稍显复杂,因为卫星绕地球运行的同时,地球也在其轨道内部绕自身轴线旋转。表8.2给出了不同轨道周期对应的轨道要素。现在我们将进一步处理其中另外两个要素:轨道倾角(inclination,即轨道平面与赤道面的交角)和升交点(ascending node,即轨道由南向北穿越赤道时的经度)。
在图8.3中,可以看到卫星的地面轨迹(Earth trace),其中标出了升交点和轨道倾角。图中卫星正好位于威胁目标的正上方。该图展示了卫星星下点(SVP)正好经过目标上空时的地面轨迹。

图8.3 升交点经度、轨道倾角以及从升交点起算的地心角共同决定了卫星星下点(SVP)的位置。
首先,我们暂时假设地球不自转,以讨论卫星在静止地球上的运动情况;之后再引入地球自转的影响。现在考虑图8.4。当卫星正好位于目标正上方时,其轨道路径上首次从地平线升起的位置为点 F,最终降至地平线以下的位置为点 G。
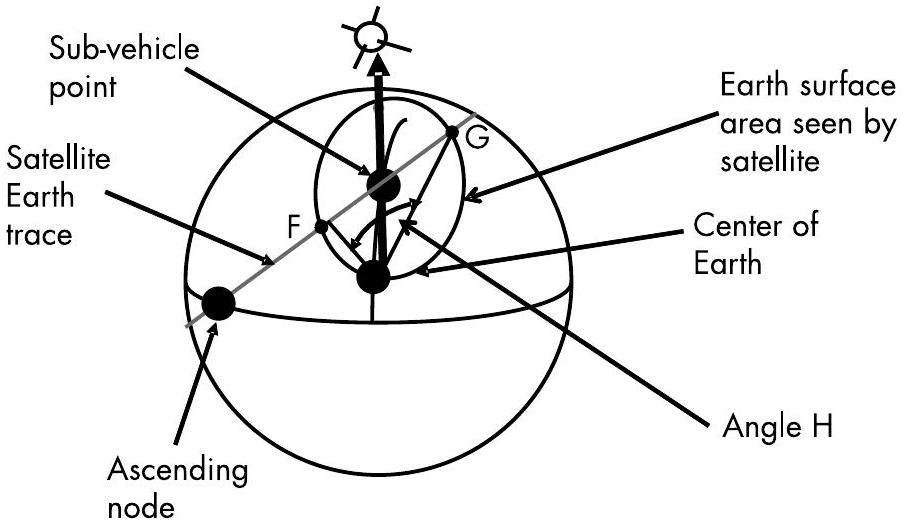
图8.4 卫星可观测的地球表面区域取决于星下点(SVP)和卫星的高度。
换一种方式理解:当卫星的星下点(SVP)到达 F 点时,它首次能够探测到该威胁目标;而当其 SVP 到达 G 点时,则是最后一次能观测到该目标。
8.3.1 地心观测角(Geocentric Viewing Angle)¶
现在考虑图8.5。这是一个由星下点(SVP)、地球表面某位置以及北极构成的球面三角形。卫星与任意地球表面点之间的地心角(geocentric angle)可由球面三角形的边余弦定理给出,公式如下:
其中: \(a\)是卫星与地球表面点之间的地心角; \(b= 90^{\circ} -\)卫星的纬度; $c = 90^{\circ} - $地球表面点的纬度; \(A\)是卫星与该地球表面点之间的经度差。
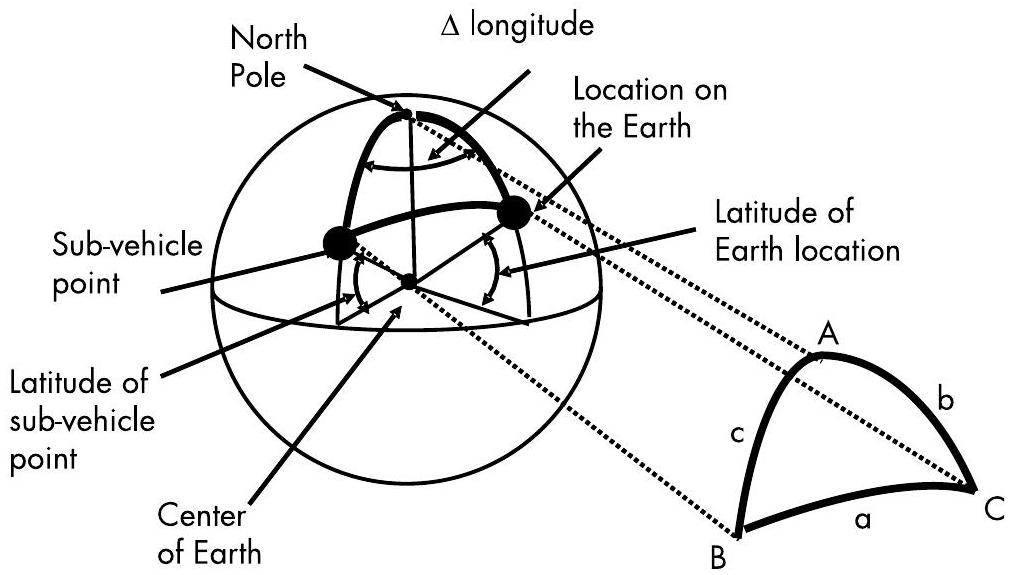
图8.5 由北极、星下点(SVP)和地球表面某位置构成一个球面三角形。
图8.6展示了一个平面三角形,位于包含卫星、两个地平线点和地球中心的平面内。角 \(G\) 是星下点(SVP)与任一地平线点之间的地心角,其数值与第8.1节中的计算结果一致。到地平线的地心角等于地球半径与卫星轨道半径之比的反余弦(arccos)。
图8.7展示了卫星轨道平面的视图。在圆形轨道中,卫星以恒定速度运行,因此在经过升交点(ascending node)之后飞越威胁目标的时间,等于轨道周期乘以升交点与目标之间地心角与\(360^{\circ}\)的比值。

图8.6 从卫星到地球表面某点的天底仰角(elevation from the nadir)和距离可通过由卫星、该地球位置和地球中心所定义的平面三角形确定。
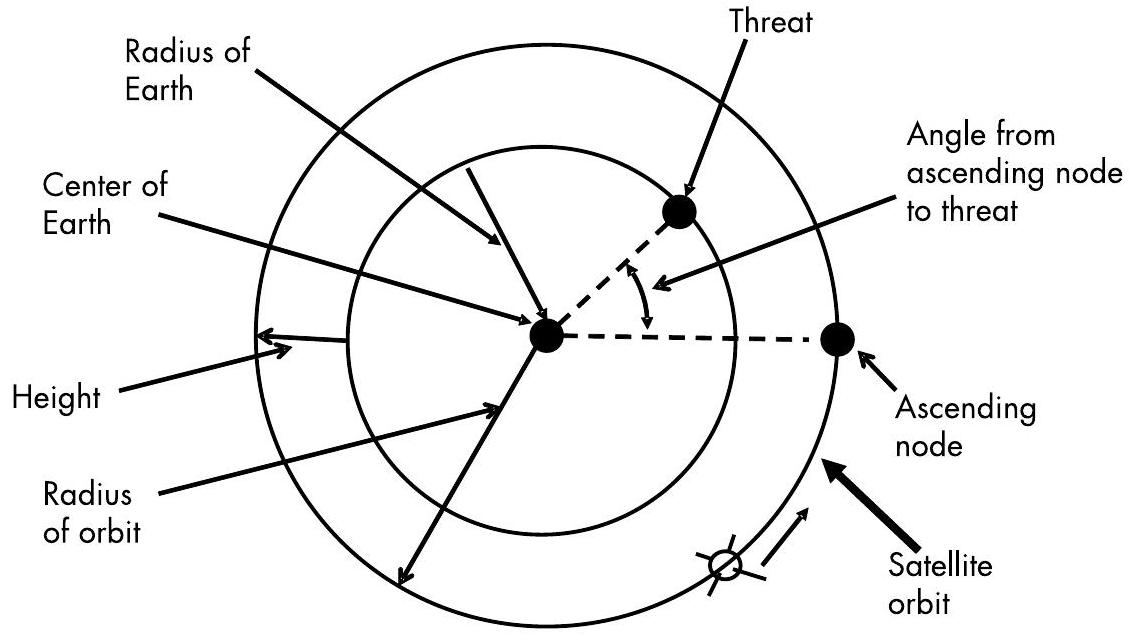
图8.7 此图显示了卫星轨道的大圆平面。从升交点起算的角度以恒定速率增加。
8.3.2 卫星可观测地球表面某点的持续时间¶
现在考虑图8.8。该图展示了卫星的轨道平面,并标出了威胁目标以及点 F 和点 G。这两点之间的地心角为角\(H\)。在假设地球不自转的前提下,卫星可观测该威胁目标的时间等于卫星周期乘以两点间地心角(角\(H\))与\(360^{\circ}\)的比值。在此期间,卫星沿轨道向东移动的距离需乘以轨道倾角余弦进行修正。
从卫星到地平线的地球表面距离,即为从威胁目标到点\(F\)或点\(G\)的距离。因此,卫星可观测该威胁目标的时间,即为其星下点(SVP)从点 F 移动到点 G 所需的时间。该时间对应的地心角为\(2 \times \arccos(\text{地球半径} / \text{轨道半长轴})\)。
现在代入具体数值。SVP 从 F 到 G 所需时间可由下式计算:
卫星周期\(\times\)(角\(H\)/\(360^{\circ}\))
图8.8 展示了从威胁目标到各地平线点的地心角。
例如,若卫星周期为 180 分钟,其轨道半长轴为\(10,560 \mathrm{~km}\),地球半径为\(6,371 \mathrm{~km}\),则角\(H\)为:
因此,在不考虑地球自转的情况下,观测时间为:
8.3.3 地球自转的影响¶
为了避免在较为抽象的球面三角学上耗费整整一章篇幅,我们将对因地球自转而为卫星带来的额外观测时间进行较为精确的估算。
如图8.8所示,卫星从点 F 移动到点 G 所需的时间,会因地球表面上被观测点在此期间向东移动而有所增加。在旋转的地球上,观测时间比在静止地球上的更长,因为卫星相对于固定经纬度点的净速度变慢了。卫星在地球表面的相对速度等于其实际速度减去地球在卫星下方自转的速度。
若地球不自转,卫星星下点(SVP)从点 F 移动到点 G 所需的时间为卫星周期乘以地心角 \(H\) 与 \(360^{\circ}\) 的比值(即 \(H / 360^{\circ}\))。在此期间,目标点因地球自转向东移动了一段距离,该距离等于地球赤道周长乘以 \(\cos(\text{lat})\),再乘以比值 \(H / 360^{\circ}\)。
首先从数学角度分析:卫星的 SVP 沿其轨道以速度 \(2 \pi a / P\) 运动。当卫星经过目标点时,其向东的速度分量为:
其中: \(a\) 为轨道半长轴(semi-major axis), \(P\) 为卫星周期(period), \(i\) 为轨道倾角(inclination), \(\text{lat}\) 为目标点的纬度。
然而,地球每年绕其轴向东自转 366 圈(恒星日计数)。这意味着地球表面上的一点(例如威胁目标位置)以每分钟 \(0.25068^\circ\)(赤道经度)的速度向东移动。由此可得赤道上一点的向东速度为 \(27.90 \mathrm{~km/min}\)。如图8.9所示,地球表面某点到地球自转轴的距离随纬度增加而减小,其减小因子为 \(\cos(\text{lat})\)。因此,地球表面某点向东移动的速度为:

图8.9 地面站的纬度决定了其到地球自转轴的距离。
8.3.4 观测时间公式¶
从点 F 的经度向东移动到点 G 的经度所需的时间等于距离除以速度。地球表面某点向东移动的距离是纬度的函数。当卫星星下点(SVP)从点 F 移动到点 G 的过程中,点 F 和 G 因地球自转而产生的向东移动距离为:
其中 \(R_E\) 为地球半径,\(\text{lat}\) 为目标纬度,\(i\) 为轨道倾角,\(H\) 为地心角(单位:度)。
地球表面某点因自转产生的向东速度为 \(27.90 \cos(\text{lat}) \ \mathrm{km/min}\)。
已知卫星从点 F 到点 G 需时 52.8 分钟。若轨道倾角为 \(60^{\circ}\),目标位于 \(45^{\circ}\) 纬度,则卫星向东扫过的经度速率为:
在 F 到 G 的 52.8 分钟期间,地球以 \(0.25^\circ/\text{分钟}\) 的速率向东自转,因此目标点向东移动了 \(0.25^\circ/\text{min} \times 52.8 \ \text{min} = 13.2^\circ\)。由于卫星本身以 \(0.708^\circ/\text{min}\) 向东移动,为了持续覆盖目标,其有效观测时间因此延长了:
因此,总的截获时间(从地平线到地平线)为:
那么,总观测时间的通用公式为:
其中: \(P\) 为卫星轨道周期(单位:分钟), \(R_E\) 为地球半径, \(a\) 为轨道半长轴(semi-major axis), \(i\) 为轨道倾角(inclination), \(\text{lat}\) 为目标点的纬度。
8.4 卫星链路中的多普勒频移(Doppler Shift)¶
由于卫星在太空中以极高的速度运行,可以预期地球表面的固定站点接收到的卫星信号频率会因多普勒频移(Doppler shift)而偏离原始发射频率。在本节中,我们将计算多普勒频移量,其为卫星轨道参数和地面接收站位置的函数。
我们考虑一颗圆轨道卫星正好飞越某一固定地面站时,其信号所产生的最大频率偏移。最大频移发生在卫星刚出现在地面站地平线时。
8.4.1 多普勒频移公式¶
多普勒频移公式给出了频率变化量与发射频率及发射机与接收机之间距离变化率(即径向速度)之间的关系。卫星沿环绕地球的轨道运行,而地球在其轨道内部自转,因此发射机和接收机均在运动。多普勒频移取决于两者速度之差,并需根据两个速度矢量之间的夹角进行修正:
其中: \(\Delta F\) 为多普勒频移(Doppler frequency shift), \(F\) 为发射频率(transmission frequency), \(V\) 为运动中的发射机或接收机的速度, \(c\) 为光速, \(\theta\) 为运动发射机(或接收机)的速度矢量与信号传播方向之间的真球面角(true spherical angle), \(V_{R}\) 为径向速度(radial velocity),即发射机与接收机之间距离的变化率。
从接收机视角看,发射机的相对速度需乘以 \(\cos \theta\) 进行投影。
为直观理解,可想象一列运动的火车鸣笛经过一辆行驶中的汽车时,车内人员听到的汽笛音调变化。
8.4.2 接收站速度¶
如图8.9所示,环绕地球的路径半径随纬度的余弦而减小。因此,地面站以向东的速度运动,其大小等于地球自转角速度乘以地球半径再乘以纬度角的余弦值。
若地面站位于北纬 \(30^{\circ}\),则其到地球自转轴的距离为地球半径乘以 \(\cos(30^{\circ})\)。该地面站在一个恒星日(sidereal day)内所经过的路径长度为 \(2\pi\) 乘以该缩减后的半径。一个恒星日(地球在空间中自转一周所需的时间)为 86,164 秒。
\(\cos(30^{\circ}) = 0.866\)
因此,地面站的速度(\(V_{E}\))为:
8.4.3 卫星速度¶
如图8.10所示,卫星沿其轨道以由轨道半长轴(semi-major axis)和卫星周期计算出的速度运行。我们选择一颗周期为3小时的圆轨道卫星。根据表8.1,该卫星距地球表面的高度为 \(4,189 \mathrm{~km}\),半长轴为 \(10,560 \mathrm{~km}\)。这意味着卫星在3小时(即10,800秒)内完成一圈轨道飞行,飞行路径长度为 \((2\pi) \times 10,560 \mathrm{~km}\)。因此,卫星的速度(\(V_S\))为:

图8.10 卫星在其轨道上的速度等于轨道周长除以轨道周期;当卫星位于地平线时,其朝向地面站的速度分量最大。
当卫星正好飞越地面站时,将产生最大的频率偏移。图8.11展示了该几何关系。在展开的球面三角形中: 边$a = 90^{\circ} - \(地面站纬度; 角\)A = 90^{\circ} - \(卫星轨道倾角(inclination); 角\)B = 90^{\circ} - \(卫星飞越地面站时相对于正东方向的北偏角(即“东偏北”角); 边\)b = 90^{\circ}$。
根据球面三角形的正弦定理:
由于边 \(b = 90^{\circ}\),故 \(\sin b = 1\),因此图中角 \(B\) 的正弦值等于 \(\sin(90^{\circ} - \text{轨道倾角})\) 除以 \(\sin(90^{\circ} - \text{地面站纬度})\)。
若地面站位于 \(30^{\circ}\) 纬度,轨道倾角为 \(45^{\circ}\),则图中角 \(B = 54.7^{\circ}\),因此卫星将以东偏北 \(35.3^{\circ}\) 的方向(即 \(90^{\circ} - B\))飞越该地面站。注意:只有当轨道倾角至少等于地面站纬度时,卫星才可能从该站天顶正上方飞越。
图8.11 由地面站、升交点(ascending node)和北极构成的球面三角形可用于计算卫星地面轨迹穿过地面站位置时的方向。
图8.12展示了地面站处的地平线平面。在该图中,地面站速度矢量与卫星速度矢量之间的夹角为 \(90^{\circ}\) 减去图8.11中的角 \(B\)(即 \(35.3^{\circ}\))。
图8.12 此图为地面站地平线平面的视图,显示了卫星的速度矢量与地面站随地球自转产生的速度矢量。
当卫星刚出现在地平线上时,其信号将产生最大的正向多普勒频移;当卫星消失于对侧地平线下时,则产生最大的负向多普勒频移。若将地平线区域视为地球表面的一小部分,则此时来自卫星的信号到达方向与速度矢量方向一致(即偏离正东方向 \(35.3^{\circ}\))。
此时距离变化率(径向速度 \(V_R\))为:
代入数值后,距离变化率为:
若卫星信号频率为 5 GHz,则根据本节开头的多普勒频移公式,频移量为:
8.4.4 最大多普勒频移的通用公式¶
综合上述讨论,可得到卫星正飞越地面站时,其上行或下行信号最大多普勒频移(maximum Doppler shift)的如下通用公式:
其中: \(\Delta F\) 为频率偏移量,单位为兆赫兹(MHz); \(F\) 为发射频率,单位为兆赫兹(MHz); \(a\) 为圆形轨道半径(即轨道半长轴),单位为千米(km); \(P\) 为轨道周期,单位为分钟(min); \(i\) 为轨道倾角(inclination),单位为度(°)。
注意:此处光速已从常用的 \(3 \times 10^{8} \ \mathrm{m/s}\) 转换为 \(1.8 \times 10^{7} \ \mathrm{km/min}\),以匹配公式中其他参数的单位。
8.4.5 多普勒频移的通用公式¶
无论卫星是否飞越地面接收机,以下讨论均可用于计算卫星轨道任意位置处、卫星与地面接收机之间上行链路(uplink)或下行链路(downlink)的多普勒频移。
该讨论始于地面接收机位置对卫星的方位角(azimuth)与仰角(elevation),如图8.13所示,这些角度是相对于接收机速度矢量定义的。
图8.13 此直角球面三角形显示了发射机相对于接收机速度矢量的位置。
其目的在于确定接收机朝向发射机的速度分量。在该图的球面三角形中,边 \(a\) 为指向发射机的方位角,边 \(b\) 为仰角。应用纳皮尔法则(Napier's rules)可得:
由于这两个角度均相对于接收机的速度矢量定义,因此 \(\cos(c)\) 即为下述公式中的 \(\Theta_{1}\)。该因子用于在计算多普勒频移时对接收机速度进行修正。
现在考虑图8.14。该球面三角形中,边 \(d\) 为从发射机到接收机的方位角,边 \(e\) 为仰角。再次应用纳皮尔法则,边 \(f\) 的余弦等于边 \(d\) 与边 \(e\) 余弦的乘积,即下述公式中的 \(\Theta_{2}\):
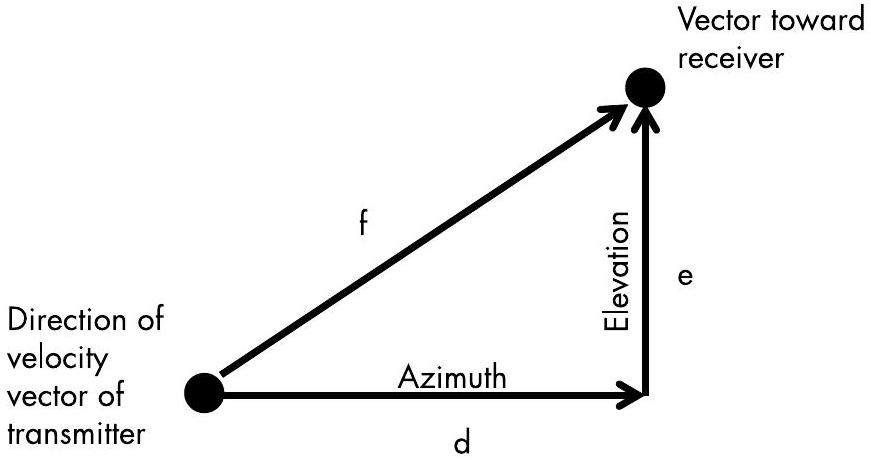
图8.14 此直角球面三角形显示了接收机相对于发射机速度矢量的位置。
该因子用于在计算多普勒频移时对发射机速度进行修正。
上行或下行链路的多普勒频移通用公式如下:
其中: \(\Delta F\) 为多普勒频移(Doppler shift), \(F\) 为发射频率(transmitted frequency), \(V_{R}\) 为接收机速度(velocity of the receiver), \(\Theta_{1}\) 为从接收机速度矢量指向发射机的真球面角(true spherical angle), \(V_{T}\) 为发射机速度(velocity of the transmitter), \(\Theta_{2}\) 为从发射机速度矢量指向接收机的真球面角, \(c\) 为光速。
结合前文讨论可知: 位于地球上的发射机或接收机的速度矢量大小为 \(27.9 \ \mathrm{km/min}\),方向正东; 卫星上发射机或接收机的速度等于轨道周长除以轨道周期; 卫星飞越地面位置过程中,其速度矢量方向持续变化; 公式中的 \(V_{R} \cos \Theta_{1} + V_{T} \cos \Theta_{2}\) 项即为发射机与接收机之间距离的变化率(径向速度)。