第5章 波束形状损失¶
在理想化雷达设计中,基本可探测性因子(Chapter 4中推导)仅在信号在收集\(n\)个脉冲或\(n'\)个相干积分样本所需的时间\(t_o\)内,始终以恒定的双向天线增益\(G_t G_r\)发射和接收,且使用匹配滤波和理想检波积分时,才能直接应用于雷达方程。对于给定天线,增益的变化在雷达方程中由乘积\(f_t f_r\)表示,并包含在模式传播因子\(F^2 = F_t F_r\)中(参见第8章)。当雷达在角度上扫描以探测目标时,增益会随时间变化,可能发生在\(t_o\)内(连续扫描)或从一次扫描/波束驻留到下一次(电子光栅扫描或步进扫描)。这一模式调制对计算\(D\)所使用的\(n\)个脉冲的影响,通过波束形状损失(或波束形状因子)\(L_p\)表示。本章讨论不同目标类型和处理方法下的波束形状损失,它适用于搜索雷达,也适用于跟踪雷达的获取模式。在大多数情况下,跟踪雷达在获取后会将波束保持在目标附近,以实现天线轴向增益,此时不会发生波束形状损失。
5.1 背景¶
5.1.1 波束形状损失的定义¶
波束形状损失被定义为 [1]:
在雷达方程中包含的损失因子,用于考虑雷达方程中使用峰值天线增益而非当接收到的脉冲序列受扫描天线双向模式调制时产生的有效增益。 同义词:天线模式损失。
回顾一下,扫描雷达中积分脉冲数\(n\)通常计算为目标在单向半功率波束宽度\(\theta_{3}\)内接收到的脉冲数。探测概率通常假设积分\(n\)个相同幅度的脉冲,波束形状损失\(L_p\)的引入旨在确保轴向信号功率足够高,使得探测概率\(P_d\)可按假设所有\(n\)个脉冲均以轴向天线增益接收来计算。图5.1显示了一个在一维扫描中由高斯波束调制的脉冲序列,其中\(n=10\),轴向功率为\(L_{p1}=1.33\)倍于矩形参考波束的功率。该调制序列的峰值功率设置为使其总能量等于矩形波束的能量。为了在信号处理时恢复这些能量,积分器权重必须匹配波束的双向高斯模式,如图所示,贡献显著的脉冲数量约为16个,而不仅仅是半功率波束内的10个脉冲。
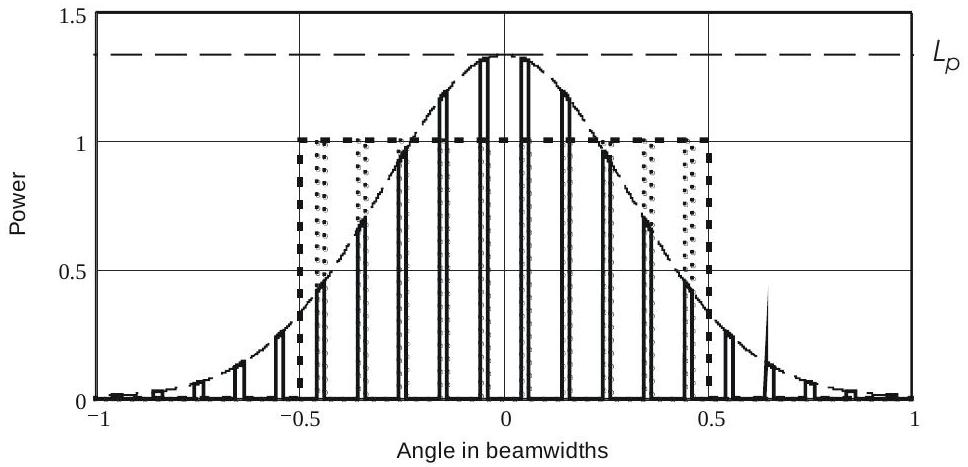
图5.1 由一维扫描高斯波束调制的脉冲序列,\(n=10\)脉冲。具有轴向功率\(L_{p1}=1.33\)的整个调制序列能量等于矩形参考波束(粗虚线)的10个脉冲能量。
5.1.2 角空间采样¶
扫描雷达在角空间执行采样。对于一维(1-D)扫描,采样可以是连续扫描脉冲序列中的单个脉冲,也可以是步进扫描天线的每个波束驻留的\(n\)脉冲组。\({ }^{1}\) 二维(2-D)扫描中,搜索光栅的每条扫描线首先在快速扫描坐标上采样。在电子步进扫描中,\(n\)个脉冲具有相同幅度,但幅度随目标相对于波束轴的位置变化,对于均匀分布在角度上的目标,幅度呈高斯分布。二维扫描中连续扫描线的样本通常通过累计探测概率组合,即探测发生在扫描的至少一条线上的概率(参见第10.2.5节)。
\({ }^{1}\) 使用步进扫描或光栅扫描时,\(n\)应解释为每个波束宽度的脉冲组或扫描线数。
角度采样间隔\(\Delta\)定义为感兴趣角坐标的单向半功率波束宽度\(\theta_{3}\)的单位。\({ }^{2}\) 雷达通常获得间隔\(\Delta \leq 0.71\)的采样,可描述为密集采样,此时\(n \geq 1.41\)。波束形状损失可以简单地定义为扫描波束接收的目标回波能量与参考矩形波束能量的比值。假设一维扫描中波束中心直接穿过目标。当不在中心时,未扫描坐标上使用模式传播因子\(F\)来补偿信号减弱。
\({ }^{2}\) 在阵列天线电子扫描中,假定间隔\(\Delta\)在正弦空间中恒定,相对于离轴角度的波束宽度保持不变。
当采样间隔 \(\Delta>0.71\) 时,会在角域中形成稀疏采样。此时,波束形状损失不再是扫描波束中接收的平均能量与矩形参考波束接收能量的简单比值,而必须定义为:为了达到与目标始终位于波束轴上并在全部 \(n\) 个脉冲下所能实现的相同平均检测概率 \(P_{d}\),在波束轴上所需增加的功率量。
角域内的平均 \(P_{d}\) 不能通过对 \(n\) 个样本积分来获得,即使这些样本的总能量是平均样本能量的 \(n\) 倍。这是因为,当要求实现 \(P_{d}>0.4\) 时,靠近波束图边缘的样本的检测概率降低,会使平均 \(P_{d}\) 的减小量大于靠近波束轴的样本所带来的增大量。
5.1.3 文献综述:波束形状损失¶
5.1.3.1 密集采样¶
波束形状损失最早由Blake在1953年的论文中提出[2]。他将损失表示为全幅(轴向)脉冲数的减少,即这些脉冲数在能量上等于由扫描波束模式调制的脉冲列所得到的总能量。Blake考虑了一种指数型波束扫描目标,通过平方律检测器向接收机发送脉冲。接收脉冲列积分带来的增益通过对矩形积分窗口内波束模式部分的积分给出,从中他推导出最佳窗口宽度和积分增益。他将结果表示为等幅脉冲的等效数量,即\(0.473 n\),假设初始时\(n \gg 1\)且在最佳角度区间\(0.844 \theta_3\)上积分器权重均匀。由于大\(n\)意味着单脉冲信噪比低,因此积分增益与\(\sqrt{n}\)成正比。
为了在目标在积分使用的\(n\)个脉冲期间不保持在轴线上时仍然保持探测概率,轴向信号功率必须按因子\(L_p = 1 / \sqrt{0.473} = 1.45 = 1.6\ \mathrm{dB}\)增加。对于较低的脉冲密度(但不包括稀疏采样情况),Blake使用求和而非积分推导出可用的积分增益,并得出结果与高密度情况非常接近。
在他论文的附录[3]中,Blake指出,对于线性检测器,其积分增益与\(n\)成正比,最佳积分区间为\(1.2 \theta_3\),损失为\(L_p = 1 / 0.67 = 1.5 = 1.7\ \mathrm{dB}\)。随后,他提出了现在被称为Blake图的射程计算[4],其中包含\(L_p\)条目。他建议将以下值作为波束形状损失的简化模型:
其中带撇号的符号表示分贝值。在第5.1.3节以及第5.3至5.5节中,我们将讨论该简化波束形状损失模型与后续研究结果之间的关系。
5.1.3.2 稀疏采样¶
Hall 和 Barton [5,6] 对较低采样密度 (\(0.5 < n < 2\)) 的波束形状损失进行了研究,例如在电子扫描雷达或二维扫描中,连续波束停留和扫描线间隔接近波束宽度时可能出现的情况。波束形状损失定义为:为在角度空间内均匀分布的目标保持给定 \(P_d\) 所需的轴向信号功率增加量。结果表明,波束形状损失强烈依赖于 \(P_d\)、采样间隔、处理方法及目标闪烁模型。
Barton [7, p. 137; 8, p. 494; 9, p. 87] 提供了稀疏采样下波束形状损失的解析近似公式。本章进一步完善这些方法,以获得不同扫描模式、不同采样密度和探测概率下更准确的波束形状损失模型,用于探测范围计算。
5.2 密集采样下的波束形状损失¶
5.2.1 简单波束形状损失模型¶
对于匹配积分器权重的情况,信号能量的损失通过积分波束的双向功率模式来计算,当波束轴线相对于目标位置在扫描路径上移动时。对于一维扫描(1-D),损失用下标\({ }_{p 1}\)表示:
其中\(f(\theta)\)是在扫描坐标\(\theta\)上的单向电压模式。对于二维扫描(2-D),在坐标\(\theta\)和\(\phi\)上,天线具有相同且可分离的照明,损失用下标\({ }_{p 2}\)表示:
5.2.2 天线模式¶
雷达天线电压模式的常用模型\({ }^{3}\)是高斯波束,它紧密地跟随大多数天线的模式至约-10 dB水平,但没有旁瓣:
\({ }^{3}\) 假设波束宽度足够窄,以支持小角度近似\(\sin \theta \approx \theta\)。
另一极端情况是均匀照明的矩形天线,其旁瓣相对于轴向增益为-13.6 dB,电压模式为:
一个中间示例是余弦照明的矩形天线,其第一旁瓣相对于轴向增益为-23 dB,电压模式为:
其中\(K_{\theta}=1.1889\)是以弧度为单位的波束宽度常数。另一个中间示例是非可分照明的均匀照明圆形天线,其旁瓣相对于轴向增益为-17.6 dB:
其中\(J_{1}(\cdot)\)是第一类一阶贝塞尔函数。在这种情况下,二维波束形状损失通过对从轴线出发的等半径\(\theta\)的元环进行积分计算:
当发射和接收波束宽度\(\theta_{t}\)和\(\theta_{r}\)不同时,前述公式中应使用的有效波束宽度为:
5.2.3 不同模式下的波束形状损失¶
高斯波束的一维和二维波束形状损失精确表示为:
其他照明模式的波束形状损失值如表5.1所示。可以看出,使用高斯模式模型计算能够充分表达这些情况下的波束形状损失,因此可用于其他雷达天线模式。\(L_{p 2}\)的值与在天气雷达方程中表示含降水量的体积分辨单元时得到的值相同 [10, p. 74, Eq. (4.13)]。
表中最后一行给出了任何雷达波束模式的标称值,精确到小数点后两位。1-D扫描的1.24 dB损失将作为参考广泛使用,在此记作\(L_{p 0}^{\prime}\)。
表5.1 常用模式模型的波束形状损失
| 模式模型 | 一维扫描 | 二维扫描 | ||
|---|---|---|---|---|
| \(L_{p 1}\) (功率比) | \(L_{p 1}^{\prime}(\mathrm{dB})\) | \(L_{p 2}\) (功率比) | \(L_{p 2}^{\prime}(\mathrm{dB})\) | |
| 高斯 | 1.3280 | 1.234 | 1.7651 | 2.468 |
| 均匀矩形 | 1.3290 | 1.235 | 1.7697 | 2.479 |
| 余弦矩形 | 1.3317 | 1.244 | 1.7733 | 2.488 |
| 均匀圆形 | 1.3314 | 1.245 | 1.7742 | 2.549 |
| 典型雷达波束 | 1.33 | 1.24 | 1.77 | 2.48 |
表5.1中的值是用于密集采样(\(\Delta<0.71\))的正常雷达方程中的波束形状损失。如下面所示,搜索雷达方程和稀疏采样的正常方程需要随\(\Delta\)变化的损失值,仅在特殊情况下接近表5.1中的值。
5.3 1-D 扫描下的稀疏采样¶
执行窄波束搜索的雷达通常需最小化覆盖给定角空间的时间,这可能导致稀疏采样(波束驻留间隔 \(\Delta > 0.71\))。此时,波束形状损失取决于所需的检测概率 \(P_d\)、采样间距、积分方式以及目标波动模型。
在使用第 1 章雷达方程时,假设雷达扫描模式已在参数计算中考虑,且每波束驻留的发射能量恒定(与驻留间距无关)。若驻留间距小于波束宽度,则每个立体角分配的能量更多。使用第 2 章搜索雷达方程时,每次扫描的发射能量恒定,因为推导中假设理想矩形波束连续且无重叠,这会改变波束形状损失的参考。驻留间距小于波束宽度会减少每驻留可用能量,因此搜索雷达方程中的波束形状损失与普通雷达方程中使用的不同。
5.3.1 一维扫描的计算方法¶
可用于积分的样本数\(n\)等于波束间隔\(\Delta\)(以波束宽度为单位)的倒数。稀疏采样\(\Delta > 0.71\)对应于\(n < 1.41\)。假设积分器权重函数与波束模式匹配,因此输出信噪比依赖于扫描期间接收的总信号能量。小的积分损失(当\(n>1\)时增加)在基本可探测性因子的计算中单独出现(参见第4.4.3节)。选择和平均样本位置与幅度以计算波束形状损失的步骤如下:
-
波束间隔:波束间隔\(\Delta_k\)以波束宽度\(\theta_3\)为单位,并在\(0.5 \le \Delta \le 1.5\)范围内变化,以覆盖密集采样情况并延伸至最大实用波束间隔。为了生成平滑的输出图,间隔以\(\delta=0.05\)递增,得到\(\Delta_k = k \delta\),其中\(k=10,11,\ldots,30\)。
-
波束角度:三个波束用\(m=1,2,3\)表示,其中心角度为\(\theta_b(k, m)=(m-2)\Delta_k\),如图5.2所示。
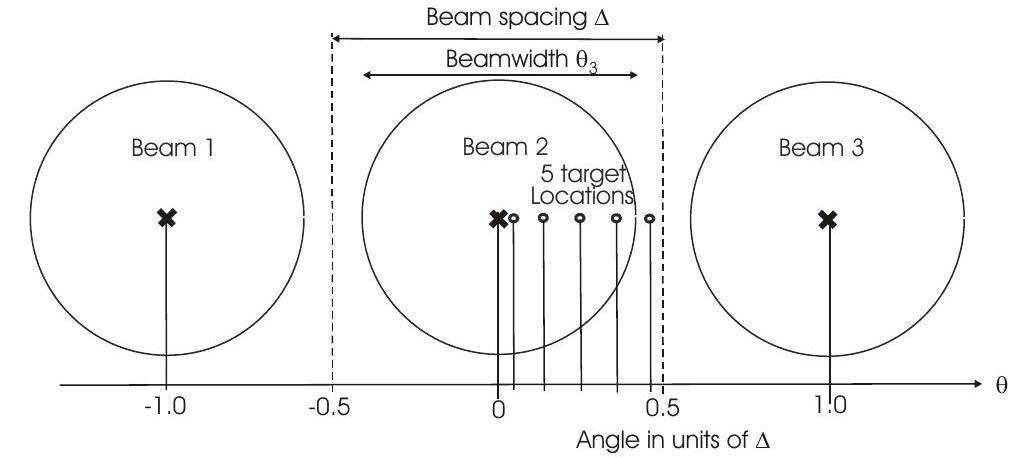
图5.2 一维扫描计算波束形状损失的波束和目标位置。
- 目标角度:为了表示均匀分布在角度\(\theta\)上的目标,在波束2的轴线与波束3轴线中点之间放置五个目标,如图5.2所示。目标索引\(j\)在\(j=1,2,\ldots,j_{\text{max}}\)之间变化,其中\(j_{\text{max}}=5\):
- 离轴角度:计算目标位置\(\theta_t(j,k)\)与波束\(m\)轴线\(\theta_b(k,m)\)之间的角度,以获得每个信号样本的三维离轴角矩阵:
- 样本信噪比:每个样本的信噪比使用余弦照明孔径的波束模式\(f_{\cos}(\theta)\)从式(5.5)计算。该模式很好地代表了许多实际雷达的波束,其中主瓣由零点界定,第一旁瓣水平为-23 dB。结果是一个四维矩阵:
其中\(s_i\)是轴向信噪比。该信噪比以分贝步长变化:\(s_i' = 0,1,\ldots,35\ \mathrm{dB}\)以覆盖所需的\(P_d\)值。然后根据目标模型和信号处理方法,使用不同的程序计算\(L_{p1}\)。
5.3.2 1-D 扫描下的稳态目标波束形状损失¶
稳态目标的波束形状损失计算步骤及两种信号合并处理方法列于表 5.2。下标 \({}_{\{0\}}\) 表示稳态目标。检测因子 (5.17) 和 (5.23) 针对四个检测概率计算:\(P_{du} = 0.1 u\),\(u=3,5,7,9\)。参考可检测性因子 \(D_{r\{0\}}\) 由 (5.18) 给出,从 (4.18) 调整得到,适用于矩形参考波束内接收的 \(n_k = 1/\Delta_k\) 信号样本的相干积分。积分损失单独计入雷达方程中的 \(D_x\)。对于 \(\Delta>1\),参考 \(D_{r\{0\}}\) 假设单个样本,功率 \(1/\Delta_k\)。
5.3.2.1 稳定目标的积分处理¶
稳态目标的一维波束形状损失 \(L_{p 1\{0\}}\) 如图5.3所示。对于间隔 \(\Delta<0.71\),所有 \(P_{d}\) 的曲线均与密集采样值 \(L_{p 0}^{\prime}=1.24 \mathrm{~dB}\) 重合。对于 \(\Delta>0.71\) 且 \(P_{d} \leq 0.45\),损失低于 \(L_{p 0}\),这是因为轴附近 \(P_{d}\) 的增加补偿了波束边缘的降低。对于 \(\Delta_{k}>0.8, P_{d}>0.45\) 的损失增加,证实了文献 [5, 6] 的结果。由于间隔 \(\Delta \geq 1.5\) 对大多数雷达应用来说损失过大,此处数据限制在 \(\Delta \leq 1.5\)。
表5.2 一维扫描稳态目标波束形状损失的计算步骤
| 整个扫描积分 | ||
|---|---|---|
| (1) 对所有 \(m\) 波束信号求和 | \(S_{i}(i, j, k)=\sum_{m} s(i, j, k, m)\) | (5.14) |
| (2) 积分信号的检测概率 | \(P_{d i\{0\}}(i, j, k)=\Phi\left[\sqrt{2 \ln \left(1 / P_{f a}\right)}-\sqrt{2 S_{i}(i, j, k)+1}\right]\) | (5.15) |
| (3) 对目标位置平均 \(P_{d i\{0\}}\) | \(\overline{P_{d\{0\}}}(i, k)=\frac{1}{j_{\max }} \sum_{j} P_{d i\{0\}}(i, j, k)\) | (5.16) |
| (4) 考虑波束形状损失的可探测性因子 | \(D_{p\{0\}}(k, u)=s_{x}, x=\operatorname{root}_{i}\left[\overline{P_{d\{0\}}}(i, k)=P_{d u}\right]\) | (5.17) |
| (5) 参考可探测性因子 | \(D_{r\{0\}}(k, u)=\frac{\Delta_{k}}{2}\left\{\left[\sqrt{2 \ln \left(1 / P_{f a}\right)}-\Phi^{-1}\left(P_{d u}\right)\right]^{2}-1\right\}\) | (5.18) |
| (6) 波束形状损失 | \(L_{p 1\{0\}}(k, u)=D_{p\{0\}}(k, u) / D_{r\{0\}}(k, u)\) | (5.19) |
| 整个扫描的累计检测 | ||
| (1) 单个波束的检测概率 | \(P_{d 1\{0\}}(i, j, k, m)=\Phi\left[\sqrt{2 \ln \left(1 / P_{f a}\right)}-\sqrt{2 s(i, j, k, m)+1}\right]\) | (5.20) |
| (2) 所有 \(m\) 波束的累计概率 | \(P_{c\{0\}}(i, j, k)=1-\prod_{m}\left[1-P_{d 1\{0\}}(i, j, k, m)\right]\) | (5.21) |
| (3) 对所有目标位置平均 \(P_{c\{0\}}\) | \(\overline{P_{c\{0\}}}(i, k)=\frac{1}{j_{\max }} \sum_{j} P_{c\{0\}}(i, j, k)\) | (5.22) |
| (4) 考虑波束形状损失的可探测性因子 | \(D_{p\{0\}}(k, u)=s_{x}, x=\operatorname{root}_{i}\left[\overline{P_{c\{0\}}}(i, k)=P_{d u}\right]\) | (5.23) |
| 步骤(5)和(6)与积分处理相同。 |
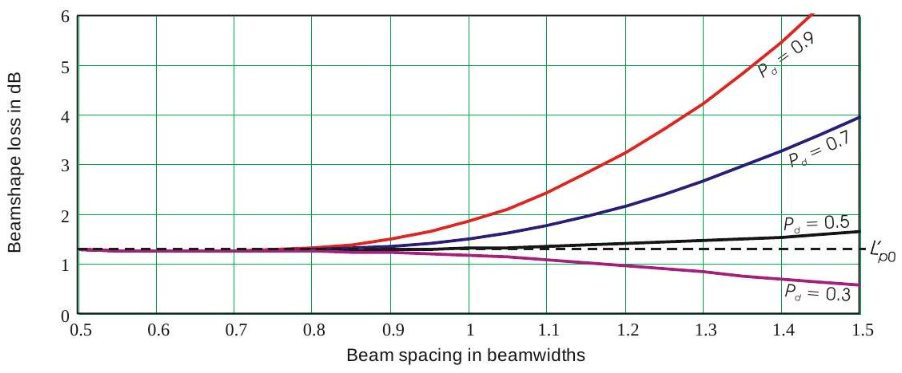
图5.3 稳定目标积分处理情况下波束形状损失 \(L_{p 1}\) 与样本间隔 \(\Delta\) 的关系。虚线表示密集采样值 \(L_{p 0}^{\prime}=1.24 \mathrm{~dB}\)。
5.3.2.2 稳定目标的累计检测¶
累计检测概率是指在扫描过程中至少有一次检测成功的概率。关于波束形状损失,每个波束位置(驻留)分别尝试检测。结果如图5.4所示。此时的损失包括累计检测效率低于积分的影响(参见第10.2.5节)。对于高 \(P_{d}\),在波束间隔约为 0.75 波束宽度时存在最佳间隔,此时连续波束位置的累计检测可替代积分。因此,即使每个波束宽度的样本数降至 1,积分稳态目标样本仍是值得的。
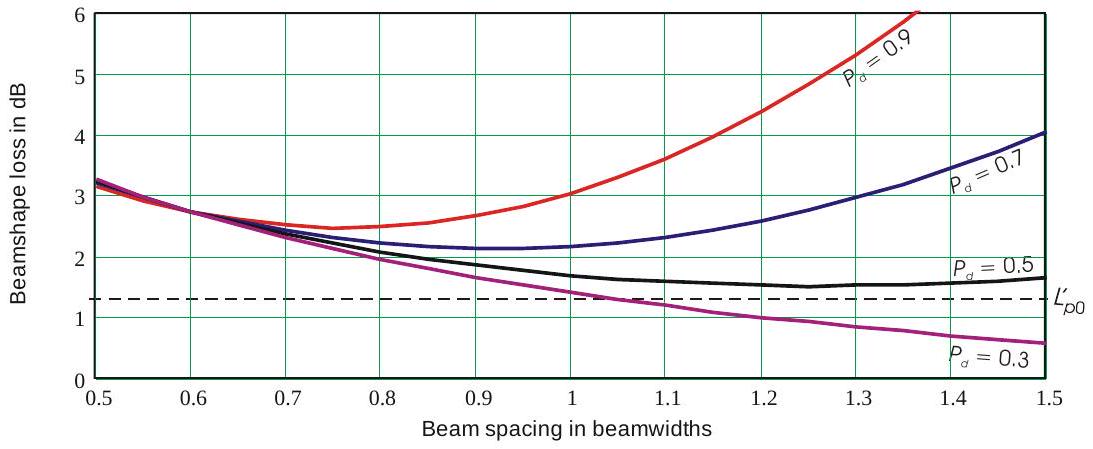
图5.4 稳定目标累计检测情况下波束形状损失 \(L_{p 1}\) 与样本间隔 \(\Delta\) 的关系。
5.3.3 一维扫描的 Case 1 波束形状损失¶
表5.3列出了计算 Case 1 目标在两种信号合并处理方法下的波束形状损失的步骤。对于积分处理,步骤与稳态目标类似,但在步骤(2)和(5)中分别用 Case 1 项 \(P_{d\{1\}}\)(式4.26)和 \(D_{r\{1\}}\)(式4.27)代替。由于 Case 1 目标的样本在扫描过程中存在相关性,必须先计算稳态目标的累计检测概率 \(P_{c\{0\}}\)(参见表5.2),然后通过对描述 Case 1 从一次扫描到下一次扫描的指数分布进行积分来求得 \(P_{c\{1\}}\)。随后步骤与稳态目标相同。
表5.3 Case 1 波束形状损失的计算步骤
| 整个扫描积分 | ||
|---|---|---|
| (1) 对 \(m\) 波束信号求和 | \(S_{i}(i, j, k)=\sum_{m} s(i, j, k, m)\) | (5.24) |
| (2) 积分信号的检测概率 | \(P_{d i\{1\}}(i, j, k)=\exp \left(\ln P_{f a} /\left[1+S_{i}(i, j, k)\right]\right)\) | (5.25) |
| (3) 对 \(j\) 个目标位置求平均 | \(\overline{P_{d i\{1\}}}(i, k)=\frac{1}{j_{\max }} \sum_{j} P_{d i\{1\}}(i, j, k)\) | (5.26) |
| (4) 波束轴上信号的可探测性因子 | \(D_{p\{1\}}(k, u)=s_{x}\),其中 \(x=\operatorname{root}_{i}\left[\overline{P_{d i\{1\}}}(i, k)=P_{d u}\right]\) | (5.27) |
| (5) 参考可探测性因子 | \(D_{r 1}(k, u)=\Delta_{k}\left[\left(\ln P_{f a} / \ln P_{d}\right)-1\right]\) | (5.28) |
| (6) 波束形状损失 | \(L_{p 1\{1\}}(k, u)=D_{p\{1\}}(k, u) / D_{r\{1\}}(k, u)\) | (5.29) |
| 整个扫描的累计检测 | ||
| (1) 单个波束的稳态目标检测概率 | \(P_{d\{0\}}(i, j, k, m)=\Phi\left[\sqrt{2 \ln \left(1 / P_{f a}\right)}-\sqrt{2 s(i, j, k, m)+1}\right]\) | (5.30) |
| (2) 所有 \(m\) 波束的稳态目标累计概率 | \(P_{c\{0\}}(i, j, k)=1-\prod_{m}\left[1-P_{d\{0\}}(i, j, k, m)\right]\) | (5.31) |
| (3) Case 1 所有 \(m\) 波束的累计概率 | \(P_{c\{1\}}(i, j, k)=(1 / s) \int_{0}^{\infty} \exp (-p / s) P_{c\{0\}}(p, j, k) d p\) | (5.32) |
| (4) 对 \(j\) 个目标位置平均概率 | \(\overline{P_{c\{1\}}}(i, k)=\frac{1}{j_{\max }} \sum_{j} P_{c\{1\}}(i, j, k)\) | (5.33) |
| 步骤(5-7) 与积分处理步骤(4-6)相同,只需将 \(P_{c\{1\}}\) 替代 \(P_{d i\{1\}}\)。 |
5.3.3.1 Case 1 积分处理¶
Case 1 积分处理的结果如图5.5所示。与稳态目标相比,波束形状损失对 \(P_{d}\) 的依赖性较小,在 \(0.5<\Delta<1.5\) 范围内,位于
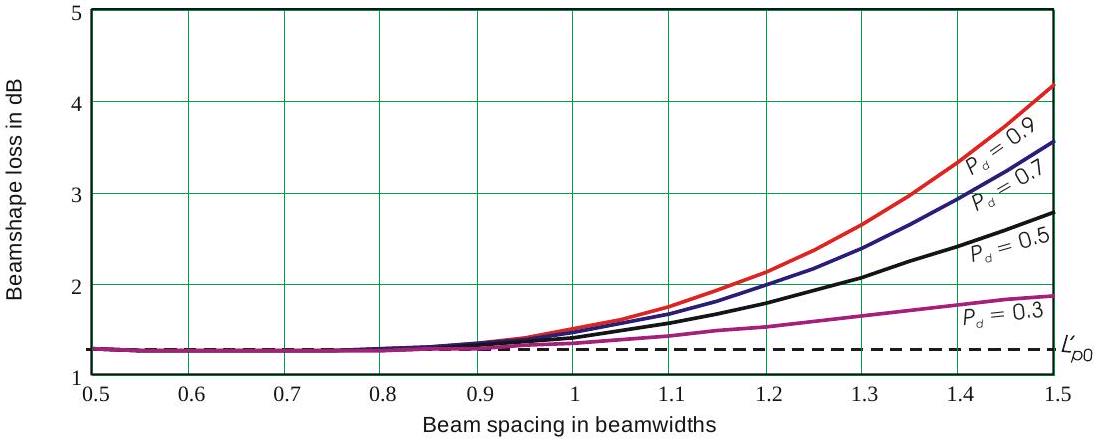
图5.5 Case 1 积分处理情况下,波束形状损失 \(L_{p 1}\) 与样本间隔 \(\Delta_{k}\) 的关系。
\(L_{p 0}=1.24 \mathrm{~dB}\) 以上且低于 4.2 dB。这是因为目标波动使得 Case 1 目标的可探测性因子随 \(P_{d}\) 的变化更为迅速,从而掩盖了波束模式引起的信号功率变化。对于 \(P_{d}>0.65\),Case 1 的波束形状损失小于稳态目标,而在该概率以下则大于稳态目标。
5.3.3.2 Case 1 累计检测¶
Case 1 累计检测的结果如图5.6所示。对于所有样本间隔,损失均大于积分处理。高 \(P_{d}\) 时最佳波束间隔约为 0.95 波束宽度。对于 \(\Delta>1\),损失随 \(P_{d}\) 的变化较稳态目标的情况小。

图5.6 Case 1 累计检测情况下,波束形状损失 \(L_{p 1}(k, u)\) 与样本间隔 \(\Delta_{k}\) 的关系。
5.3.4 Case 2 一维扫描波束形状损失¶
Case 2 目标为每个样本提供独立的目标幅度。然而,对于积分处理,用于计算检测概率 \(P_{d\{2\}}\) 和参考可探测性因子 \(D_{r\{2\}}\) 的三束独立样本数取决于匹配积分器中样本的加权:
其中 \(\overline{f_{g}^{x}[\theta(j, k, m)]}\) 为三束的平均值,\(m=1,2,3\)。图5.7显示了样本数量随波束间隔变化的情况。
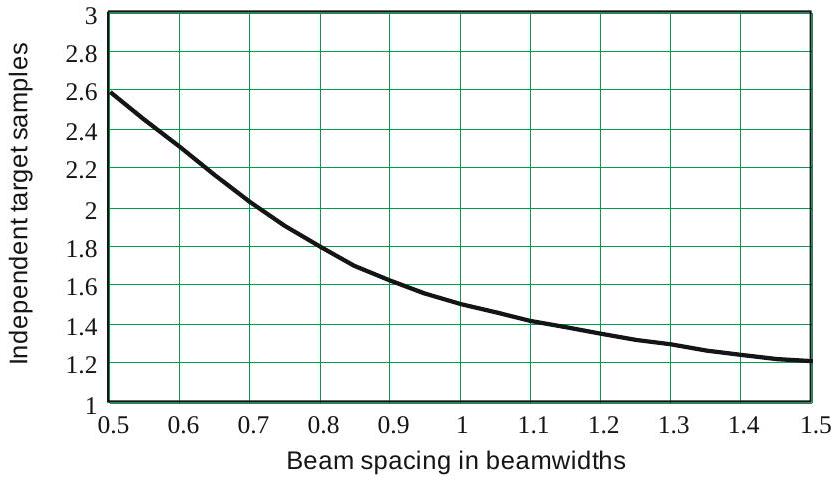
图5.7 独立目标样本数 \(n_{e}\) 随波束间隔 \(\Delta_{k}\) 的变化。
图5.8显示了三种目标模型的参考可探测性因子,对于波束间隔 \(\Delta_{k}=1\) 时,\(n_{e}(k)=1.5\)。对于较大波束间隔,Case 2 的因子接近 Case 1 的值,此时 \(n_{e}(k) \rightarrow 1\);对于较小波束间隔,接近稳态目标的值,\(n_{e}(k) \gg 1\)。
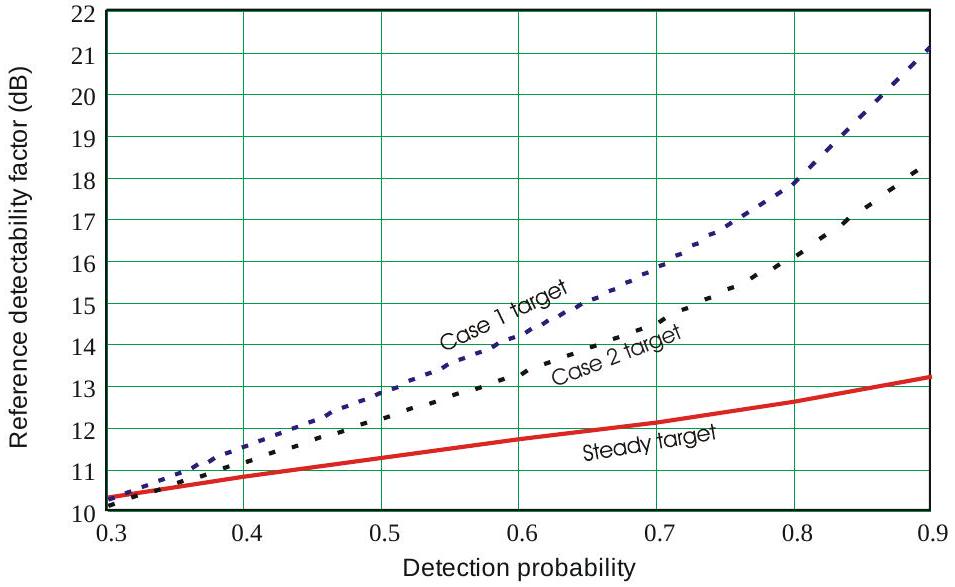
图5.8 一维扫描参考可探测性因子 \(D_{r\{0,1,2\}}\),波束间隔 \(\Delta_{k}=1\)。
表5.4列出了计算 Case 2 目标波束形状损失的两种信号处理方法步骤。对于积分处理,步骤与稳态目标类似,但在步骤(2)中使用 Case 2 的 \(P_{d\{2\}}\) (公式4.36),在步骤(5)中使用根据 \(\Delta_{k}\) 调整的 \(D_{r\{2\}}\) (公式4.37)。
表5.4 Case 2 目标波束形状损失计算方法
| 整个扫描积分 | ||
|---|---|---|
| (1) 汇总 \(m\) 波束信号 | \(S_{i}(i, j, k)=\sum_{m} s(i, j, k, m)\) | (5.35) |
| (2) 积分信号的检测概率,含 \(n(k)\) 个目标样本 | \(P_{d\{2\}}(i, j, k)=1-P_{\gamma}\left\{\frac{P_{\gamma}^{-1}\left(1-P_{f a}, 1\right)-\left[1-n_{e}(k)\right]}{\left[1 / n_{e}(k)\right] S_{i}(i, j, k)+1}, n_{e}(k)\right\}\) | (5.36) |
| (3) 在目标位置上平均 \(P_{d\{2\}}\) | \(\overline{P_{d\{2\}}}(i, k)=\frac{1}{j_{\max }} \sum_{j} P_{d\{\{ \}}(i, j, k)\) | (5.37) |
| (4) 含波束形状损失的可探测性因子 | \(D_{p\{2\}}(k, u)=s_{x}\),其中 \(x=\operatorname{root}_{i}\left[\overline{P_{d\{2\}}}(i, k)=P_{d u}\right]\) | (5.38) |
| (5) 参考可探测性因子 | \(D_{r 2}(k, u)=\Delta_{k}\left\{\frac{P_{\gamma}^{-1}\left(1-P_{f a}, 1\right)-\left[1-n_{e}(k)\right]}{P_{\gamma}^{-1}\left[1-P_{d_{u}}, n_{e}(k)\right]}-1\right\} n_{e}(k)\) | (5.39) |
| (6) 波束形状损失 | \(L_{p 1\{2\}}(k, u)=D_{p\{2\}}(k, u) / D_{r\{2\}}(k, u)\) | (5.40) |
| 整个扫描累计检测 | ||
| (1) 单个瑞利样本检测概率 | \(P_{d\{1\}}(i, j, k, m)=\exp \left\{\ln P_{f a} /[1+s(i, j, k, m)]\right\}\) | (5.41) |
| (2) \(m\) 波束的累计概率 | \(P_{c\{2\}}(i, j, k)=1-\prod_{m}\left\{1-P_{d 1\{1\}}[s(i, j, k, m)]\right\}\) | (5.42) |
| (3) 在目标位置上平均概率 | \(\overline{P_{c\{2\}}}(i, k)=\frac{1}{j_{\text {max }}} \sum_{j} P_{c\{2\}}(i, j, k)\) | (5.43) |
| 步骤(4-6)与积分处理相同,仅用 \(\mathrm{P}_{\mathrm{c}\{2\}}\) 替代 \(\mathrm{P}_{\mathrm{d}\{2\}}\)。 |
5.3.4.1 Case 2 积分处理¶
Case 2 的积分处理波束形状损失未单独绘制,因为实际上与 Case 1(图5.5)的损失几乎没有区别。随着 \(\Delta \rightarrow 1.5\),曲线略微分散,但与 Case 1 的差异小于 0.2 dB。
5.3.4.2 Case 2 累计检测¶
Case 2 的累计检测结果如图5.9所示。对于 \(\Delta>1\),结果介于稳态目标和 Case 1 之间。由于参考可探测性因子考虑了 Case 2 积分处理相对于 Case 1 的多样性优势,\(\Delta=0.5\) 时的损失略微分布在适用于稳态目标和 Case 1 的值周围,并且当 \(P_{d}>0.3\) 时,波束形状损失高于 Case 1。然而,这并不意味着需要更高的信噪比,因为参考值的降低幅度大于 \(L_{p}\) 的增加。

图5.9 Case 2 目标累计检测下波束形状损失 \(L_{p 1}(k, u)\) 与样本间隔 \(\Delta_{k}\) 的关系。
5.3.5 1-D 扫描搜索雷达方程中使用的波束形状损失¶
搜索雷达方程基于在帧时间 \(t_{s}\) 内将能量均匀分布到覆盖定义搜索扇区的理想矩形波束(\(\Delta=1\))的连续驻留中。对于连续扫描,“驻留”可视为导致检测判决的处理时间,而在步进扫描中,则为每个步的驻留时间。
对于实际波束间距 \(\Delta<1\),每个驻留的能量必须降低;对于 \(\Delta>1\),必须增加能量,以保持 \(t_{s}\) 内的总能量恒定。因此,将搜索雷达方程应用于 1-D 扫描时,每个驻留的能量应与间距 \(\Delta\) 成正比。当计算波束形状损失随 \(\Delta\) 的变化时,将能量的这种变化视为对搜索雷达方程使用的净波束形状损失 \(L_{p n 1}\) 的贡献。其结果为:
计算净波束形状损失 \(L_{p n 1}\) 的步骤与计算 \(L_{p 1}\) 相同,只是样本信噪比由 (5.13) 替换为:
能量重新分配对波束形状损失的净影响如图5.10和图5.11所示,分别对应稳态目标和 Case 1 目标的积分处理。数据表明,对于 \(P_{d}=0.9\),积分处理的最优波束间距约为 \(\Delta \approx 1.1\),随着 \(P_{d}\) 降低而增大。
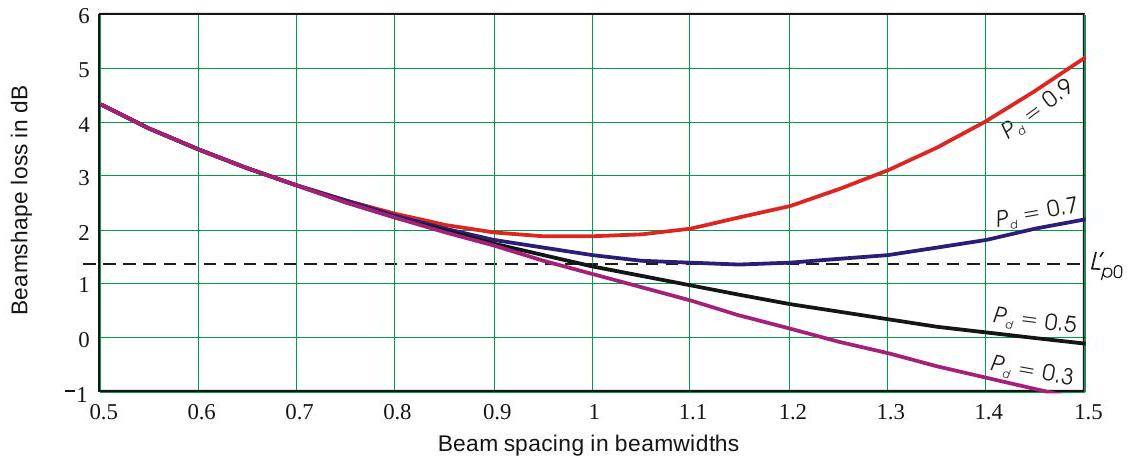
图5.10 稳态目标积分处理下净波束形状损失 \(L_{p n 1}\) 与样本间隔 \(\Delta_{k}\) 的关系。
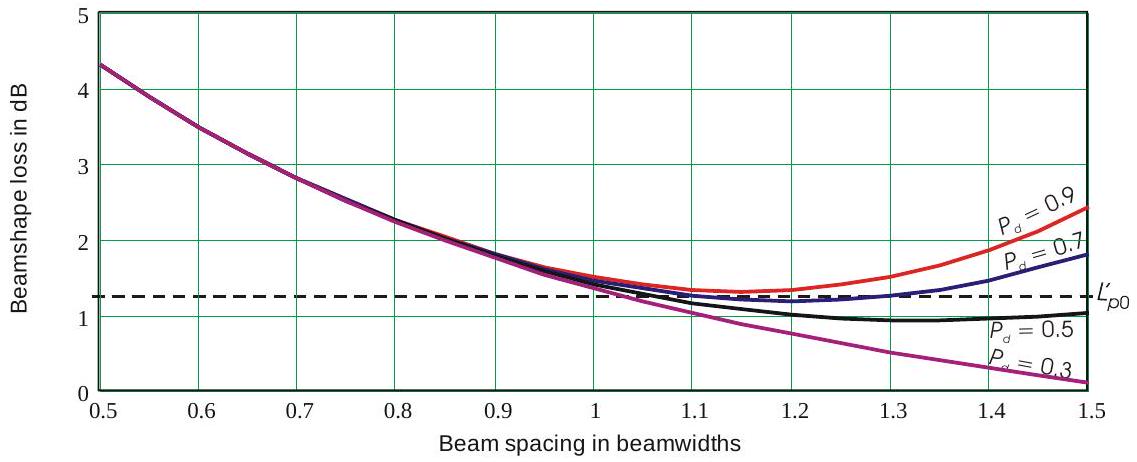
图5.11 Case 1 积分处理下净波束形状损失 \(L_{p n 1}\) 与样本间隔 \(\Delta_{k}\) 的关系。
电子扫描搜索可能执行伪随机扫描,而非确定性步进扫描。在这种情况下,邻近波束的积分可能难以实现,因此使用累计检测过程。稳态目标和 Case 1 的累计检测净波束形状损失如图5.12和图5.13所示。稳态目标的最优间距与信号积分处理相同,Case 1 增加到 \(\Delta_{k}=1.2\)。最优间距的损失为:稳态目标 \(L_{p n 1}=3.1 \mathrm{~dB}\),波动目标 \(L_{p n 1}=1.9 \mathrm{~dB}\)。
其他波动目标的净波束形状损失曲线未包含在此,因为 Case 1 是雷达系统设计的主要类型,而 Case 2 的结果介于稳态目标和 Case 1 之间。
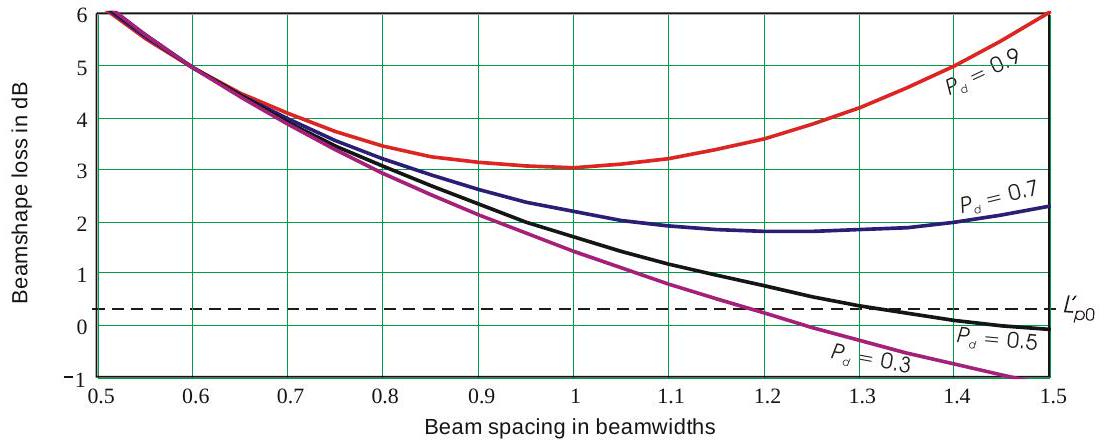
图5.12 稳态目标累计检测下净波束形状损失与样本间隔 \(\Delta_{k}\) 的关系。
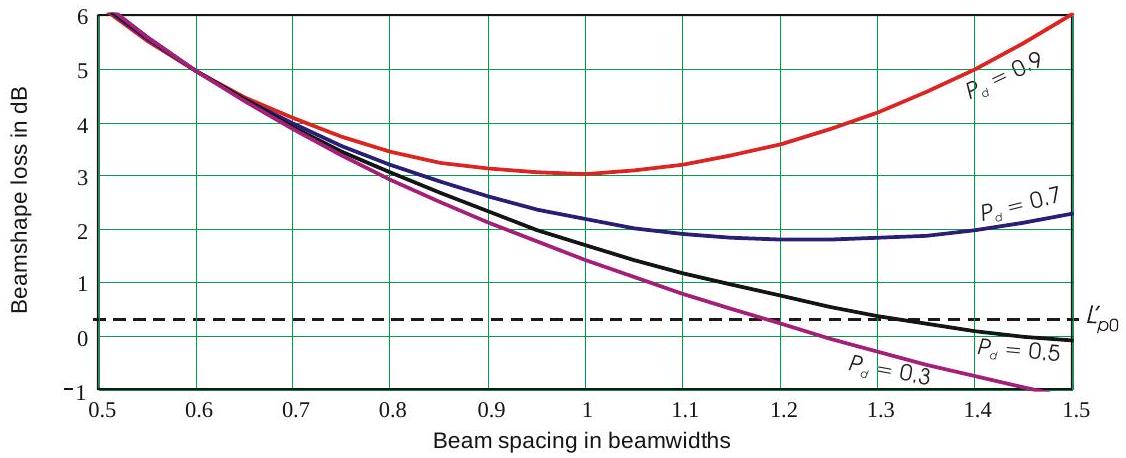
图5.13 Case 1 混合处理下净波束形状损失与样本间隔 \(\Delta_{k}\) 的关系。
5.4 二维栅格扫描中的稀疏采样¶
二维栅格扫描使用矩形波束网格,如图5.14所示。用于求角空间平均值的目标位置占据中心波束的一个象限。波束形状损失的分析比一维扫描复杂,但通常可通过假设两个坐标的波束间距相同来简化分析,实际情况通常如此。尽管图中显示的是圆形波束,该分析同样适用于椭圆波束,只需将间距按各坐标的波束宽度进行缩放即可。
第二个复杂因素是可能使用三种处理方法中的任意一种:在整个扫描范围内进行积分或累计检测,或对每条扫描线进行积分后,再对三条线进行累计检测,我们称之为混合处理。

图5.14 二维栅格扫描的波束网格与目标样本位置。
第三个复杂因素是现在必须考虑四种目标模型,而不是三种:
- 稳态目标:扫描中所有样本的信号功率相等;
- Case 1 目标:功率波动,整个扫描过程中相关(Case 1);
- Case 2 目标:功率波动,从一个驻留到下一个驻留不相关(Case 2);
- 多样性目标:功率波动,每条扫描线内部相关,但连续扫描线之间不相关。该去相关性来源于某种形式的多样性,该目标情况用下标 \({ }_{D}\) 表示。
尽管分析四种模型的程序均已给出,但这里只展示后三种情况的结果,因为稳态目标很少遇到。对波动目标将采用卡方统计分析,其他模型可使用对卡方目标描述的分析方法进行分析。稳态目标波束形状损失在其他情况下的解析近似见附录 5A。积分处理的结果可通过将图5.3(一维扫描)的损失值平方(即分贝值加倍)得到。
5.4.1 2-D 扫描的计算方法¶
2-D 扫描的几何设置与 1-D 扫描(第 5.3.1 节)类似,但有如下变化:
- 波束间距:\(0.5 \leq \Delta_k \leq 1.5\) 波束宽度,与 1-D 扫描相同,并在两个角度坐标上均采用。
- 波束角度:共 9 个波束,编号 \(m=1,2,\dots,9\),轴位置为 \(\theta_m(k,m)=x_{k,m}, y_{k,m}\),如图 5.14 所示。三条扫描线编号 \(a=1,2,3\),每行包含三个波束 \(m_1(a) \le m \le m_2(a)\),例如 \(m_1(1)=1\),\(m_2(1)=3\)。
- 目标角度:共有 25 个目标位置 \(\theta_t(j,k)=x_{j,m}, y_{j,m}\),\(j=1,2,\dots,25\),如图 5.14 所示。
其中 \(x\) 为扫描速度较快的坐标,可为方位、俯仰或正弦空间坐标,便于积分;正交坐标为 \(y\)。
- 偏离轴角度:每个波束中心到目标位置的偏离轴角度计算为
然后应用公式 (5.13)。角度 \(\theta, x, y\) 均以波束宽度 \(\theta_3\) 为单位。
- 样本 SNR:样本信噪比 \(s(i,j,k,m)\) 的计算方法与 1-D 扫描相同,使用公式 (5.13)。
5.4.2 稳态目标的 2-D 扫描波束形状损失¶
对整个扫描进行积分和累积检测的步骤仍与表 5.2 相同,但参考可探测性因子中的 \(\Delta_k\) 替换为 \(\Delta_k^2\),2-D 损失记为 \(L_{p 2}\) 替代 \(L_{p 1}\)。波束和目标的上限分别为 \(m=9\) 和 \(j=25\)。
混合处理的计算步骤列在表 5.5 中。稳态目标的数据未绘制,因为可以通过将 1-D 损失平方(dB 值翻倍)得到近似值,参见图 5.3 和 5.4。
表 5.5 采用混合处理方式计算平稳目标波束形状损失的步骤
| (1) 对第 \(a=1,2,3\) 行中各波束的信号进行求和 | \(S_i(i, j, k, a)=\sum_{m=m_1(a)}^{m_2(a)} s(i, j, k, m )\) | (5.47) |
|---|---|---|
| (2) 计算第 \(a\) 行中积分信号的检测概率 | \(P_{d i\{0\}}(i, j, k, a)=\Phi\left[\sqrt{2 \ln \left(1 / P_{f a}\right)}-\sqrt{2 S_i(i,j,k,a)+1}\right]\) | (5.48) |
| (3) 对所有行进行累积概率计算 | \(P_{di\{0\}}(i, j, k)=1-\prod_{m=m_1(a)}^{m_2(a)}\left[1-P_{d i\{0\}}(i, j, k, a)\right]\) | (5.49) |
| (4) 对目标位置取平均的 \(P_{d i\{0\}}\) | \(\overline{P_{d i\{0\}}}(i, k)=\frac{1}{j_{\max }} \sum_j P_{d i\{0\}}(i, j, k)\) | (5.50) |
| (5) 包含波束形状损失的可检测性因子 | \(D_{p\{0\}}(k, u)=s_x, x=\operatorname{root}_i\left[\overline{P_{di\{0\}}}(i, k)=P_{d u}\right]\) | (5.51) |
| (6) 参考可检测性因子 | \(D_{r\{0\}}(k, u)=\frac{\Delta_k}{2}\left\{\left[\sqrt{2 \ln \left(1 / P_{f a}\right)}-\Phi^{-1}\left(P_{d u}\right)\right]^2-1\right\}\) | (5.52) |
| (7) 波束形状损失 | \(L_{p 2\{0\}}(k, u)=D_{p\{0\}}(k, u) / D_{r\{0\}}(k, u)\) | (5.53) |
5.4.3 Case 1 的 2-D 扫描波束形状损失¶
对整个扫描进行积分和累积检测的步骤仍与 1-D 扫描表 5.3 相同,但参考可探测性因子中的 \(\Delta_k\) 替换为 \(\Delta_k^2\),波束和目标的上限分别为 \(m=9\) 和 \(j=25\)。
5.4.3.1 Case 1 积分处理¶
Case 1 积分处理的结果如图5.15所示。波束形状损失位于 \(2 L_{p 0}^{\prime}=2.48 \mathrm{~dB}\) 以上且小于 9.6 dB,对应 \(0.5<\Delta_{k}<1.5\)。与一维扫描的 Case 1 损失相比,可见二维损失几乎正好是 1-D 损失的平方(分贝值加倍)。

图5.15 Case 1 积分处理下,波束形状损失 \(L_{p 2}\) 与样本间距 \(\Delta_{k}\) 的关系。虚线表示密集采样值 \(L_{p 2}^{\prime}=2.48 \mathrm{~dB}\)。
5.4.3.2 Case 1 累计检测¶
Case 1 累计检测的结果如图5.16所示。累计检测效率较低的影响被考虑在内,小间距样本的损失增加。如同积分处理情况,二维损失约等于一维损失的平方。
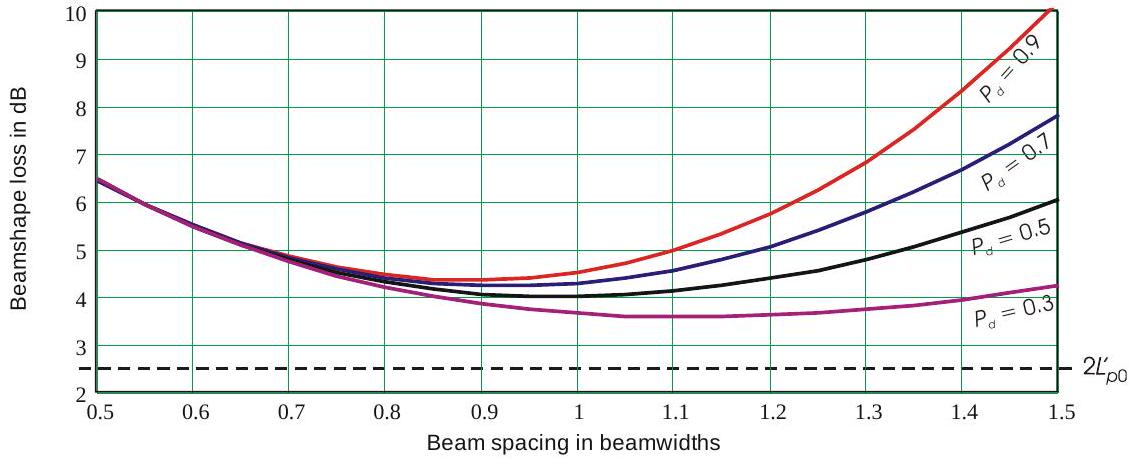
图5.16 Case 1 累计检测下,波束形状损失 \(L_{p 2}\) 与样本间距 \(\Delta_{k}\) 的关系。
5.4.3.3 Case 1 混合处理¶
Case 1 混合处理下波束形状损失的计算步骤列于表5.6。步骤(1)对每条扫描线 \(a=1,2,3\) 进行积分。步骤(2)给出对应的稳态目标检测概率,步骤(3)形成稳态目标累计概率。步骤(4)转换为 Case 1 累计概率 \(P_{m}\)。步骤(5)-(8)与表5.3中的(3)-(6)平行。
Case 1 混合处理的波束形状损失如图5.17所示。通过对每条扫描线积分,累计检测损失得到降低,因此 \(\Delta=0.5\) 时的损失降至 4.5 dB,这一值位于整条扫描积分与累计检测的损失之间。大间距时的损失接近整条扫描累计检测的损失。
表5.6 Case 1 混合处理下波束形状损失的计算步骤
| 步骤 | 公式 | 注释 |
|---|---|---|
| (1) 对线 \(a\) 中波束信号求和 (5.47) | \(S_{i}(i, j, k, a)=\sum_{m=m_{1}(a)}^{m_{2}(a)} s(i, j, k, m, a)\) | |
| (2) 线 \(a\) 积分信号稳态目标检测概率 (5.48) | \(P_{d i\{0\}}(i, j, k, a)=\Phi\left[\sqrt{2 \ln \left(1 / P_{f a}\right)}-\sqrt{2 S_{i}(i, j, k, a)+1}\right]\) | |
| (3) 所有线稳态目标累计概率 (5.49) | \(P_{c\{0\}}(i, j, k)=1-\prod_{m=m_{1}(a)}^{m_{2}(a)}\left[1-P_{d i\{0\}}(i, j, k, a)\right]\) | |
| (4) 所有线 Case 1 累计概率 | \(P_{c\{1\}}(i, j, k)=(1 / s) \int_{0}^{\infty} \exp (-p / s) P_{c\{0\}}(p, j, k) d p\) | (5.54) |
| (5) 对所有目标位置平均 \(P_{m i\{1\}}\) | \(\overline{P_{c\{1\}}}(i, k)=\frac{1}{j_{\max }} \sum_{j} P_{c\{1\}}(i, j, k)\) | (5.55) |
| (6) 考虑波束形状损失的可探测因子 | \(D_{p\{1\}}(k, u)=s_{x}, x=\operatorname{root}_{i}\left[\overline{P_{c\{1\}}}(i, k)=P_{d u}\right]\) | (5.56) |
| (7) 参考可探测因子 | \(D_{r 1}(k, u)=\Delta_{k}\left[\left(\ln P_{f a} / \ln P_{d}\right)-1\right]\) | (5.57) |
| (8) 波束形状损失 | \(L_{p 2\{1\}}(k, u)=D_{p\{1\}}(k, u) / D_{r\{1\}}(k, u)\) | (5.58) |
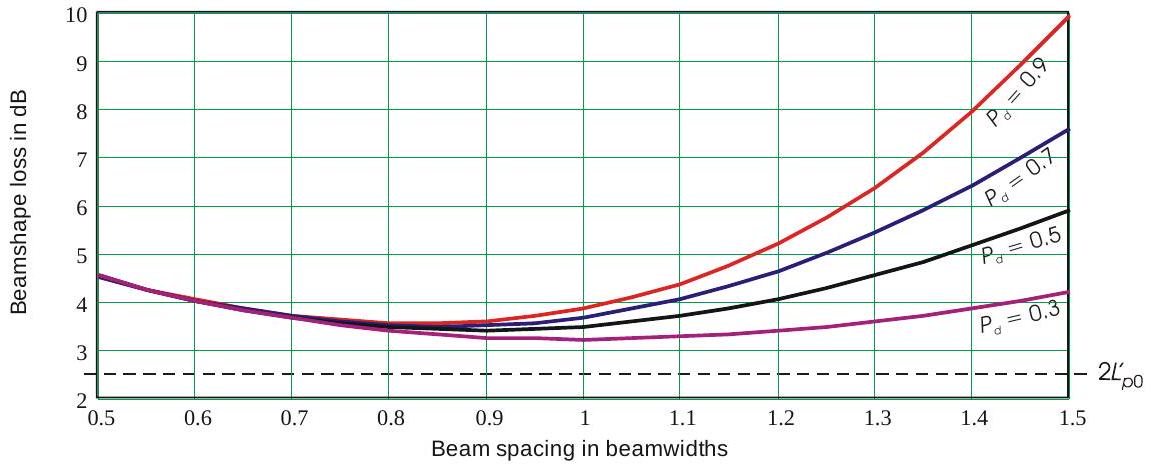
图5.17 Case 1 混合处理下,波束形状损失 \(L_{p 2}\) 与样本间距 \(\Delta_{k}\) 的关系。
5.4.4 Case 2 波束形状损失(2-D 扫描)¶
对整个扫描的积分与累计检测步骤仍如表5.4所示,但参考可探测因子中的 \(\Delta_{k}\) 改为 \(\Delta_{k}^{2}\)。二维扫描中 \(m_{\max}=9\) 波束内独立目标样本数为:
图5.18显示了独立样本数随波束间距变化的关系。图5.19显示了所有目标模型(包括第5.4.5节讨论的多样性目标)的参考可探测因子。可见,多样性目标的可探测因子位于 Case 1 和 Case 2 之间。
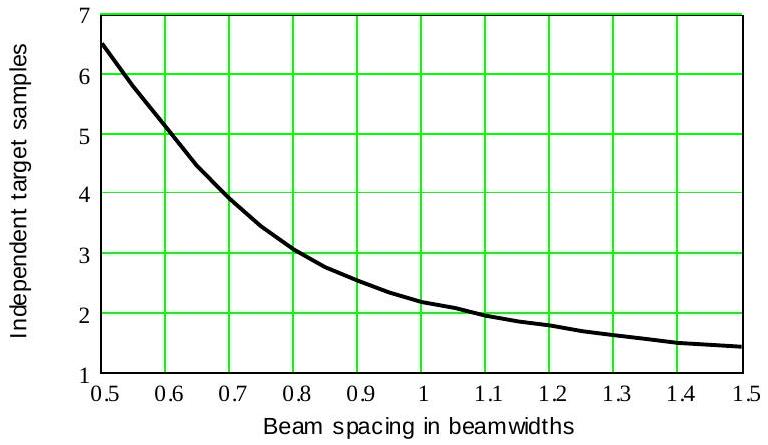
图5.18 二维扫描中独立目标样本数随波束间距变化的关系。
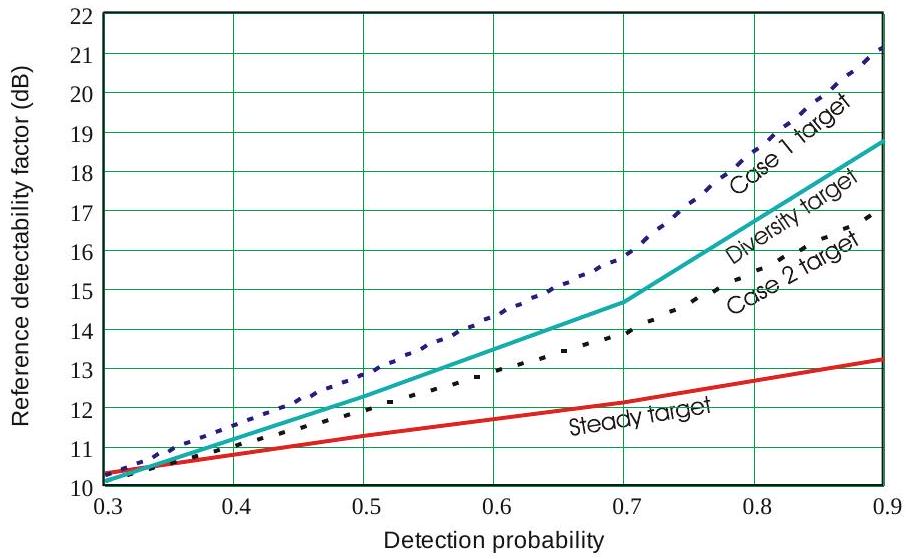
图5.19 二维扫描中各目标模型参考可探测因子 \(D_{r\{0,1,2,D\}}\),\(\Delta_{k}=1\)。
5.4.4.1 Case 2 积分处理¶
Case 2 积分处理下的波束形状损失如图5.20所示。与 Case 1 类似,对于 \(\Delta<0.71\),损失趋于密集采样值。高 \(P_{d}\) 下,随着 \(\Delta\) 增大,损失略高于 Case 1。
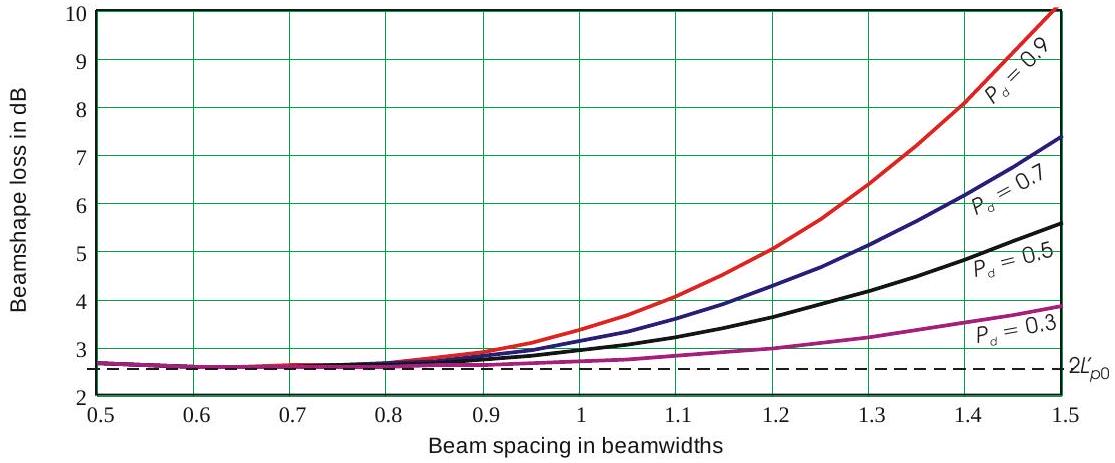
图5.20 Case 2 积分处理下,波束形状损失 \(L_{p 2}\) 与样本间距 \(\Delta_{k}\) 的关系。
5.4.4.2 Case 2 累计检测¶
整个扫描的 Case 2 累计检测波束损失如图5.21所示。\(P_{d}=0.9\) 时最优间距为 \(\Delta \approx 0.9\),对应 \(L_{p 2}=5.8 \mathrm{~dB}\);随着 \(P_{d}\) 降低,最优间距上升至 \(\Delta \approx 1.1\)(\(P_{d}=0.3\))。\(\Delta<0.7\) 的较大损失是由于累计检测效率低造成的。Case 2 的累计检测损失大于 Case 1,但这是由于 Case 2 参考水平 \(D_{r 2}\) 较低,并不意味着其需要更高的 SNR 来达到相同检测性能。
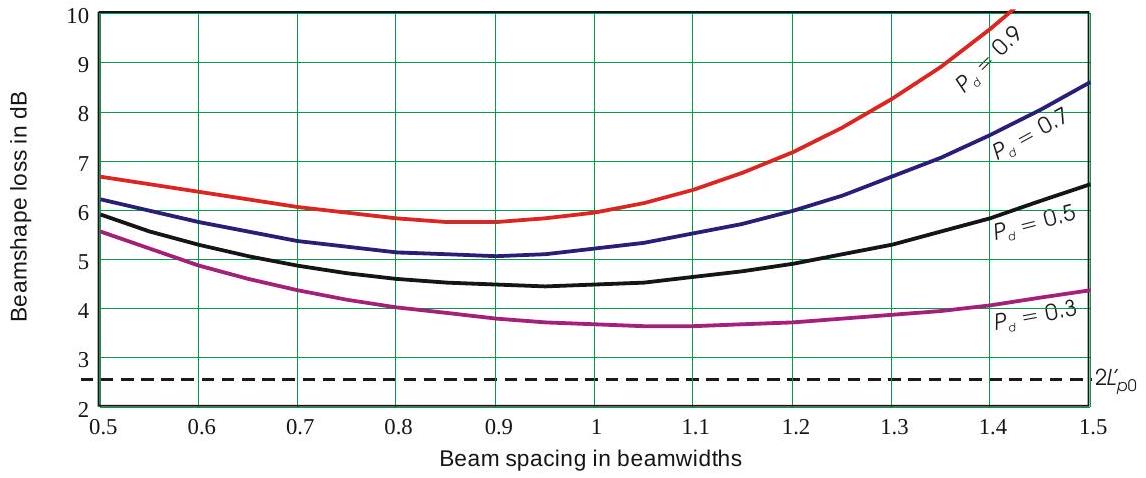
图5.21 Case 2 累计检测下,波束形状损失 \(L_{p 2}\) 与样本间距 \(\Delta_{k}\) 的关系。
5.4.4.3 Case 2 混合处理¶
Case 2 混合处理下波束形状损失的计算步骤列于表5.7。步骤(1)对每条扫描线 \(a=1,2,3\) 进行积分。步骤(2)给出该线的 Case 2 检测概率,其中 \(n_{e 1}\) 为单线内独立目标样本数(见公式5.34与图5.7)。步骤(3)形成 Case 2 累计概率 \(P_{m\{2\}}\)。步骤(4)-(7)与表5.4的(3)-(6)平行。
表5.7 Case 2 混合处理下波束形状损失计算步骤
| 步骤 | 公式 | 注释 |
|---|---|---|
| (1) 对线 \(a\) 中波束信号求和 (5.47) | \(S_{i}(i, j, k, a)=\sum_{m=m_{1}(a)}^{m_{2}(a)} s(i, j, k, m, a)\) | |
| (2) 线 \(a\) 积分信号 Case 2 检测概率 | \(P_{d\{2\}}(i, j, k, a)=1-P_{\gamma}\left\{\frac{P_{\gamma}^{-1}\left(1-P_{f a}, 1\right)-\left[1-n_{e 1}(k)\right]}{\left[1 / n_{e 1}(k)\right] S_{i}(i, j, k, a)+1}, n_{e 1}(k)\right\}\) | (5.60) |
| (3) 所有线 Case 2 累计概率 | \(P_{c\{2\}}(i, j, k)=1-\prod_{m=m_{1}(a)}^{m_{2}(a)}\left\{1-P_{d\{2\}}[s(i, j, k, a)]\right\}\) | (5.61) |
| (4) 对所有目标位置平均 | \(\overline{P_{c\{2\}}}(i, k)=\frac{1}{j_{\max }} \sum_{j} P_{c\{2\}}(i, j, k)\) | (5.62) |
| (5) 考虑波束形状损失的可探测因子 | \(D_{p\{2\}}(k, u)=s_{x}, x=\operatorname{root}_{i}\left[\overline{P_{c\{2\}}}(i, k)=P_{d u}\right]\) | (5.63) |
| (6) 参考可探测因子 | \(D_{r 2}(k, u)=\Delta_{k}\left\{\frac{P_{\gamma}^{-1}\left(1-P_{f a}, 1\right)-\left[1-n_{e}(k)\right]}{P_{\gamma}^{-1}\left[1-P_{d_{u}}, n_{e}(k)\right]}-1\right\} n_{e}(k)\) | (5.64) |
| (7) 波束形状损失 | \(L_{p 2\{2\}}(k, u)=D_{p\{2\}}(k, u) / D_{r\{2\}}(k, u)\) | (5.65) |
Case 2 混合处理下的波束形状损失如图5.22所示。曲线与 Case 1(图5.17)类似。最优间距随 \(P_{d}\) 变化,从 \(P_{d}=0.9\) 时的 \(\Delta=0.8\) 到 \(P_{d}=0.3\) 时的 \(\Delta=1.05\)。
5.4.5 二维扫描下的多样性目标波束形状损失¶
表 5.8 给出了在整个扫描范围内进行积分以及累积检测时,计算多样性目标波束形状损失的步骤。该目标定义为具有 Rayleigh 起伏,其幅度在每条扫描线上相关,但相邻扫描线之间不相关。因此,其相关性特征介于情形 1 和情形 2 之间。
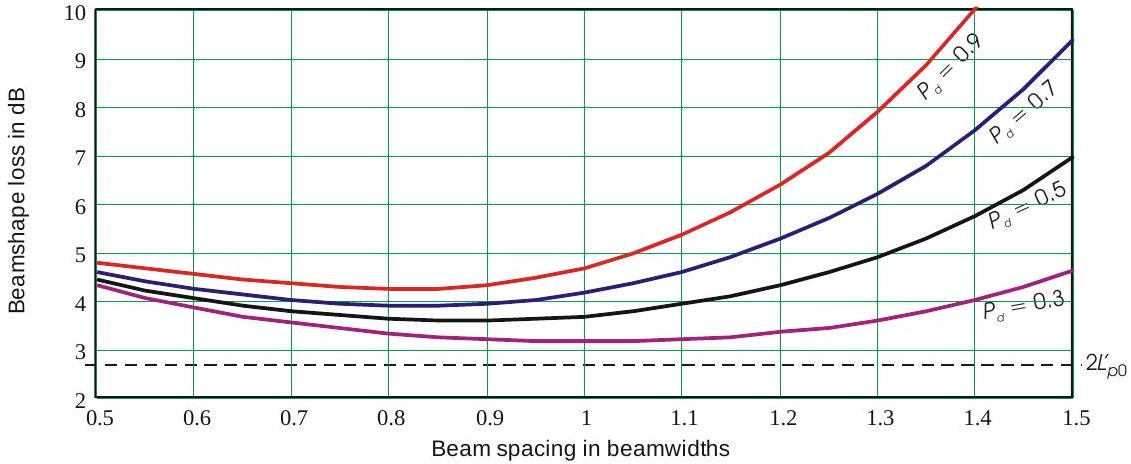
图 5.22 情形 2 下混合处理时波束形状损失 \(L_{p 2}\) 随采样间隔 \(\Delta_{k}\) 的变化。
表 5.8 计算多样性目标波束形状损失的方法
| 在整个扫描范围内积分 | ||
|---|---|---|
| (1) 将来自 \(m\) 个波束的信号相加 | \(S_{i}(i, j, k)=\sum_{m} s(i, j, k, m)\) | (5.66) |
| (2) 具有 \(n_{e 1}(k)\) 个目标样本 (5.36) 的信号的检测概率 | \(P_{d\{D\}}(i, j, k)=1-P_{\gamma}\left\{\frac{P_{\gamma}^{-1}\left(1-P_{f a}, 1\right)-\left[1-n_{e 1}(k)\right]}{\left[1 / n_{e 1}(k)\right] S_{i}(i, j, k)+1}, n_{e 1}(k)\right\}\) | |
| (3) 对目标位置求平均 \(P_{d\{2\}}\) | \(\overline{P_{d\{D\}}}(i, k)=\frac{1}{j_{\max }} \sum_{j} P_{d\{D\}}(i, j, k)\) | (5.67) |
| (4) 含波束形状损失的可检测因子 | \(D_{p\{D\}}(k, u)=s_{x}\),其中 \(x=\operatorname{root}_{i}\left[\overline{P_{d\{D\}}}(i, k)=P_{d u}\right]\) | (5.68) |
| (5) 参考可检测因子 | \(D_{r D}(k, u)=\Delta_{k}\left\{\frac{P_{\gamma}^{-1}\left(1-P_{f a}, 1\right)-\left[1-n_{e}(k)\right]}{P_{\gamma}^{-1}\left[1-P_{d_{u}}, n_{e}(k)\right]}-1\right\} n_{e}(k)\) | (5.69) |
| (6) 波束形状损失 | \(L_{p 1\{D\}}(k, u)=D_{p\{D\}}(k, u) / D_{r\{D\}}(k, u)\) | (5.70) |
| 在整个扫描范围内进行累积检测 | ||
|---|---|---|
| (1) 单个稳态样本的检测概率 | \(P_{d\{0\}}(i, j, k, m)=\Phi\left[\sqrt{2 \ln \left(1 / P_{f a}\right)}-\sqrt{2 s(i, j, k, m)+1}\right]\) | (5.71) |
| (2) 在扫描线 \(a=1,2,3\) 上的累积概率 | \(P_{c\{0\}}(i, j, k)=1-\prod_{m=m_{1}(a)}^{m_{2}(a)}\left[1-P_{d\{0\}}(i, j, k, m)\right]\) | (5.72) |
| (3) 情形 1 下扫描线 \(a=1,2,3\) 的累积概率 (5.32) | \(P_{c\{1\}}(i, j, k)=(1 / s) \int_{0}^{\infty} \exp (-p / s) P_{c\{0\}}(p, j, k) d p v\) | |
| (4) 所有扫描线的累积概率 | \(P_{c\{D\}}(i, j, k)=1-\prod_{a=1}^{3}\left\{1-P_{c\{1\}}[s(i, j, k)]\right\}\) | (5.73) |
| 步骤 (5–8) 与积分时的步骤 (3–6) 相同,只需将 \(P_{d\{D\}}\) 替换为 \(P_{c\{D\}}\)。 |
积分在所有 \(m\) 个波束上进行,与其他目标模型相同。然而,在步骤 (2) 中所用的独立目标样本数是扫描中单条线上的样本数,由公式 (5.34) 给出并绘制在图 5.7 中。(这些样本实际上来自波束的中心列,即 \(m=2,5,8\),但由于对称性,波束 \(m=4,5,6\) 具有相同的相关特性。)因此,积分步骤等效于对情形 2 目标进行一维扫描。
累积检测的计算在步骤 (1) 从每个单独波束的稳态目标检测概率开始。步骤 (2) 给出了每条扫描线上稳态目标的累积概率,而在步骤 (3) 中,该概率在指数分布上积分,从而得到起伏目标在单条扫描线上的累积概率。然后在步骤 (4) 中利用该结果计算三条扫描线上的累积概率,而这三条线的信号相互不相关。
与其他目标模型一样,信号可以通过三种方式之一进行处理:扫描范围内的积分、扫描范围内的累积检测,或对每条扫描线进行积分(混合处理)。
5.4.5.1 多样性目标的积分处理¶
多样性目标在积分处理下的波束形状损失如图5.23所示。该目标的损失几乎与Case 2不可区分,而Case 2在整个扫描中使用积分处理时,也几乎与Case 1无法区分。
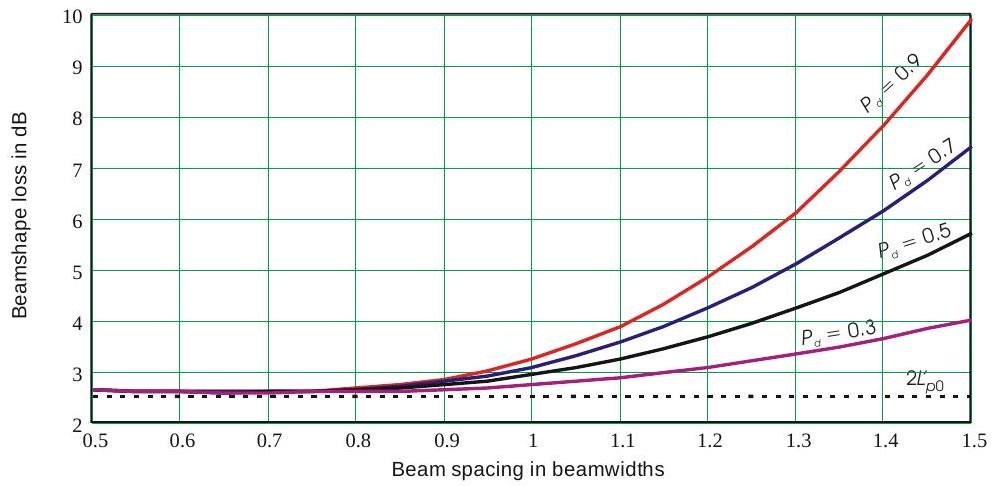
图5.23 多样性目标积分处理下的波束形状损失\(L_{p 2}\)与采样间距 \(\Delta_{k}\) 的关系。
5.4.5.2 多样性目标的累积检测¶
多样性目标在整个扫描中进行累积检测的波束形状损失如图5.24所示。对于 \(P_d=0.9\),最佳采样间距约为 \(Delta \approx 0.9\),此时\(L_{p 2}=5.3~\mathrm{dB}\);随着 \(P_d\)降低,最佳采样间距向上移动,对于\(P_d=0.3\) 时约为 \(Delta \approx 1.15\)。
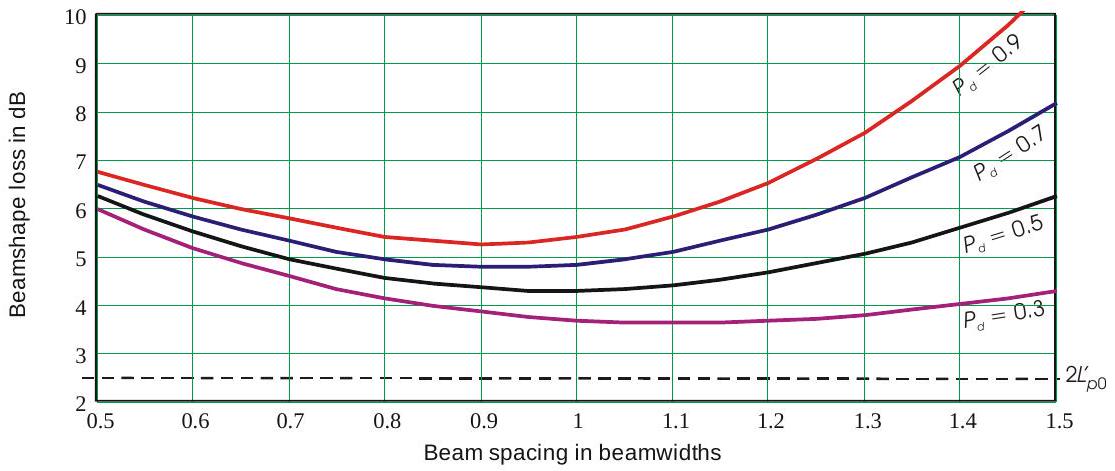
图5.24 多样性目标累积检测下的波束形状损失$L_{p 2} $与采样间距 $\Delta_k $的关系。
5.4.5.3 多样性目标的混合处理¶
多样性目标的混合处理波束形状损失如图5.25所示。其损失与Case 2目标非常相似。对于\(P_d=0.9\),最佳采样间距为\(Delta=0.85\),此时损失为 4.7 dB。采样间距\(Delta>1.3\) 会引入不可接受的损失,对于需要高 \(P_d\)的应用不可采用。
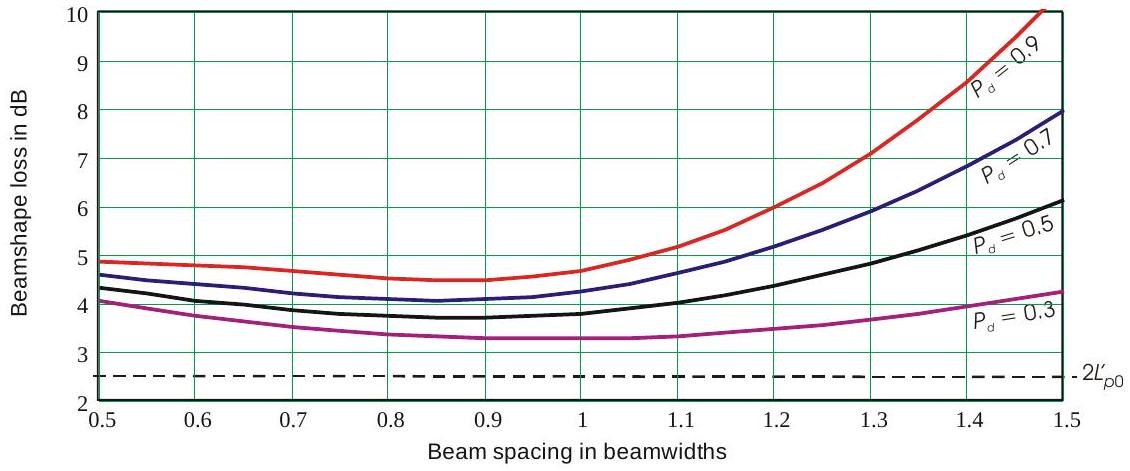
图5.25 多样性目标混合处理下的波束形状损失\(L_{p 2}\)与采样间距 \(Delta_k\)的关系。
5.4.6 2-D 光栅扫描中搜索雷达方程的波束形状损失¶
如第5.3.5节对1-D扫描所述,搜索雷达方程中必须采用净波束形状损失:
该损失考虑了在搜索帧时间内将发射能量重新分配到随间距变化而需要的更多或更少波束的影响。能量重新分配与波束形状损失的综合效果在图5.26和图5.27中给出了,分别针对Case 1和Case 2目标的累积检测情况。数据表明,对于累积检测,两类目标的最佳波束间距均大于1。可以看出,即使在要求高 \(P_d\)的情况下,相对稀疏的采样也是有利的,尤其是对于Case 2目标。
对覆盖大扇区的2-D扫描收集的信号进行积分可能不易实现(例如,对于高速目标,其可能在扫描周期内穿过距离分辨单元)。更实际的方法是混合处理:对光栅每一行的相邻波束进行积分,再通过整个扫描的累积检测将连续行组合。该情况下的净波束形状损失在图5.28和图5.29中分别给出了Case 1和Case 2目标的结果。
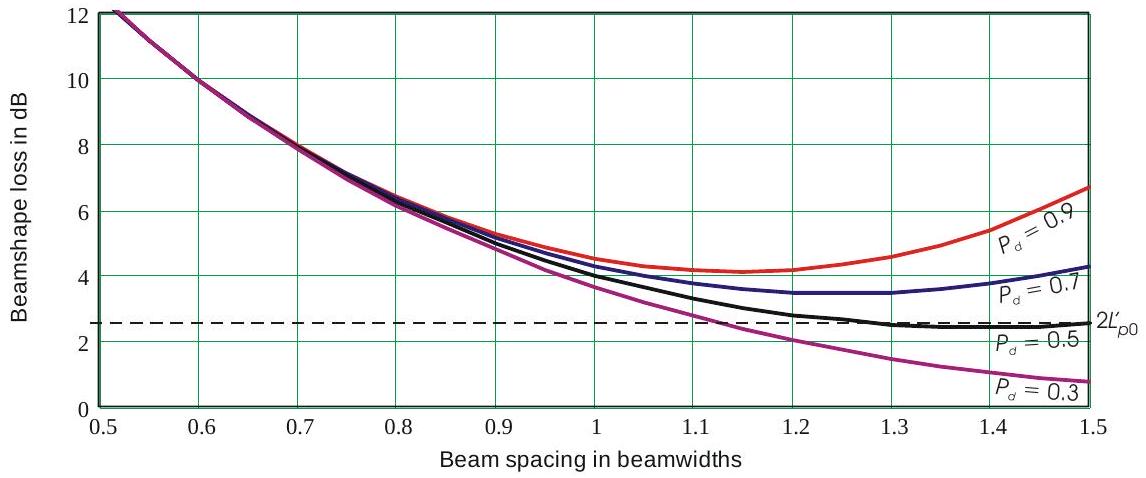
图5.26 Case 1目标累积检测下的净波束形状损失\(L_{p n 2}\) 与采样间距\(Delta_k\)的关系。

图5.27 Case 2目标累积检测下的净波束形状损失\(L_{p n 2}\)与采样间距 \(Delta_k\)的关系。
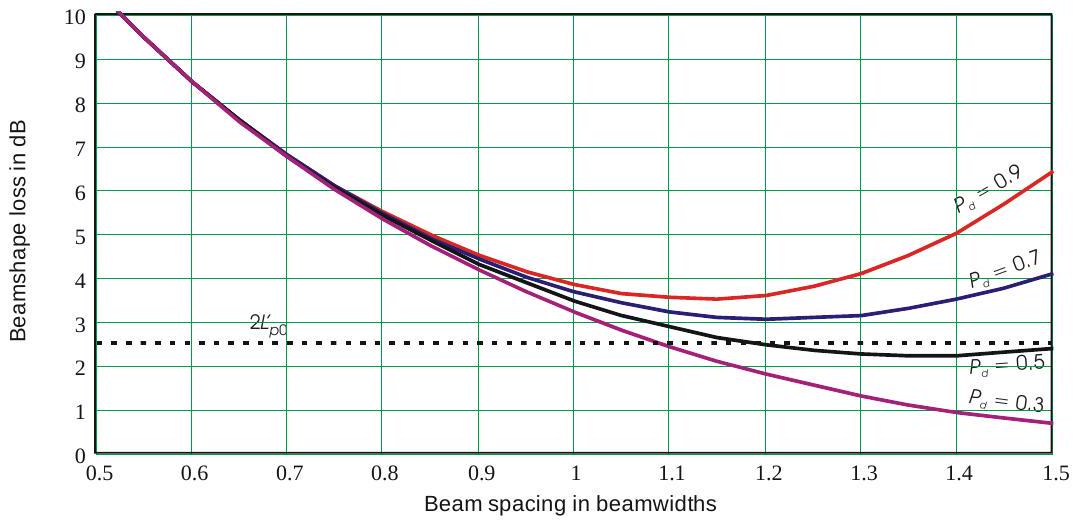
图5.28 Case 1目标混合处理下的净波束形状损失\(L_{p n 2}\)与采样间距\(Delta_k\)的关系。

图5.29 Case 2目标混合处理下的净波束形状损失 \(L_{p n 2}\)与采样间距 \(Delta_k\)的关系。
在这些净波束形状损失的比较中,并未考虑密集采样扫描在角度估计精度方面的优势。当采用“边扫描边跟踪”技术(track-while-scan)利用重叠波束的检测数据形成跟踪文件时,精度的提高可能使额外的能量消耗是合理的。然而,在设计搜索扫描以最小化功率和时间时,波束间距达到一个波束宽度或更大通常是有利的。在能够在首次检测后立即分配验证和跟踪启动波束的系统中,跟踪启动发生的距离(以概率\(P_{\text{track}}\)表示)可以延伸到多个扫描的累积检测概率等于\(P_{\text{track}}\)的距离。稀疏采样减少扫描时间并进行多次扫描的另一个优点是,波动目标通常会在扫描之间变得不相关,从而降低波动损失。
5.5 使用三角网格的稀疏采样¶
三角网格的几何布局与矩形网格(第5.4节)类似,但连续扫描线的波束在\(x\) 坐标上错开\(0.5 \Delta\),而在 \(y\) 坐标上的间距从 \(Delta\)缩小为\(sqrt{0.75} \Delta\),形成图5.30所示的等边三角形。目标位置占据中心波束的一个象限,但竖直间距相对于矩形光栅进行了\(sqrt{0.75}\) 的缩放。其结果是在扫描扇区内实现了更均匀的能量分布,并降低了波束形状损失。计算方法遵循矩形网格的方法,但有以下变化。

图5.30 三角扫描网格的波束布局和目标样本位置。
5.5.1 三角网格的计算方法¶
每种处理类型的步骤与矩形网格相同(表5.2-5.8),但参考可探测性因子中用\(sqrt{0.75} \Delta_{k}^{2}\) 替代 \(Delta_{k}^{2}\),并用 \(L_{p \text{T2}}\) 表示损失,而不是 $L_{p 2}。m $和 \(j\)的上限分别为9和25。波束间距\(Delta\)与矩形网格相同,从0.5到1.5波束宽,但现在适用于图5.30所示等边三角形的边长。
5.5.2 三角网格的稳态目标波束形状损失¶
此目标模型的结果未在此呈现,因为在实际雷达中很少适用。损失的解析近似见附录5A。
5.5.3 三角网格的Case 1波束形状损失¶
5.5.3.1 Case 1的积分处理¶
Case 1的积分处理波束形状损失如图5.31所示。高 \(P_d\)下的损失明显低于图5.15矩形网格的损失。相邻行间距较近所需的额外功率为\(1 / \sqrt{0.75}\)或 0.63 dB,而\(P_d=0.9\) 时\(Delta=1.2\) 的损失降低为2 dB。对于 \(Delta \rightarrow 0.5\) 的轻微上升是因为未包括图5.30所示九波束网格以外的贡献,而这些贡献在参考可探测性因子的计算中被假定包括。实际处理系统中是否会扩展积分到这些波束尚不确定。
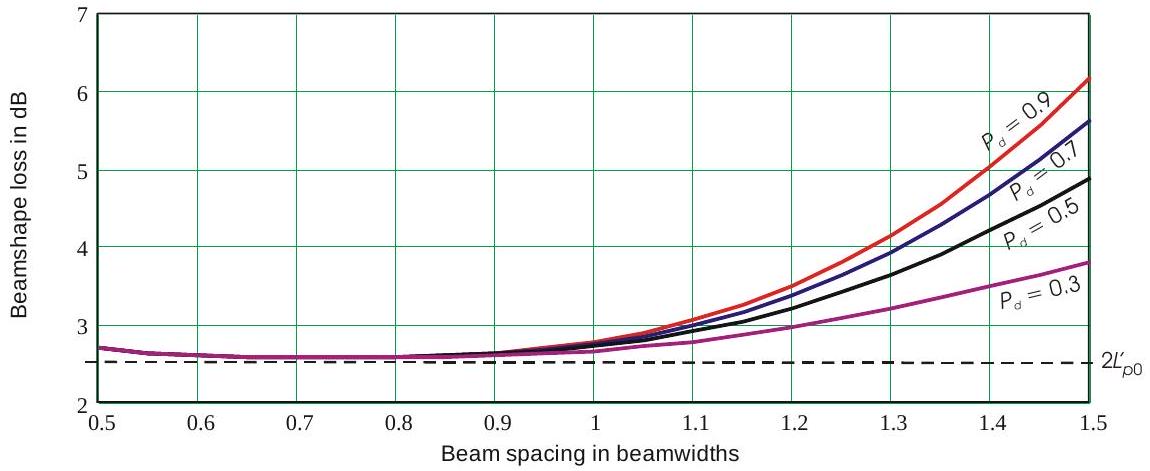
图5.31 Case 1在整个扫描上积分处理下的波束形状损失 \(L_{p T 2}\)与采样间距\(Delta_k\)的关系。
5.5.3.2 Case 1的累积检测处理¶
Case 1的累积检测损失如图5.32所示。高 \(P_d\) 且 \(Delta>1.1\)时的损失仍明显低于矩形网格。

图5.32 Case 1累积检测下的波束形状损失 \(L_{p T 2}\)与采样间距\(Delta_k\) 的关系。
5.5.3.3 Case 1的混合处理¶
图5.33显示了Case 1混合处理的损失。与矩形网格相比,对于\(Delta>1.1\) 的损失降低明显,而当\(Delta \rightarrow 0.5\)时有轻微增加。

图5.33 Case 1混合处理下的波束形状损失 \(L_{p T 2}\)与采样间距\(Delta_k\) 的关系。
5.5.4 三角网格的Case 2波束形状损失¶
与矩形网格相比,扫描行间距较近使Case 2的独立样本数量略有增加,导致参考可探测性因子略有下降,如图5.34和5.35所示。
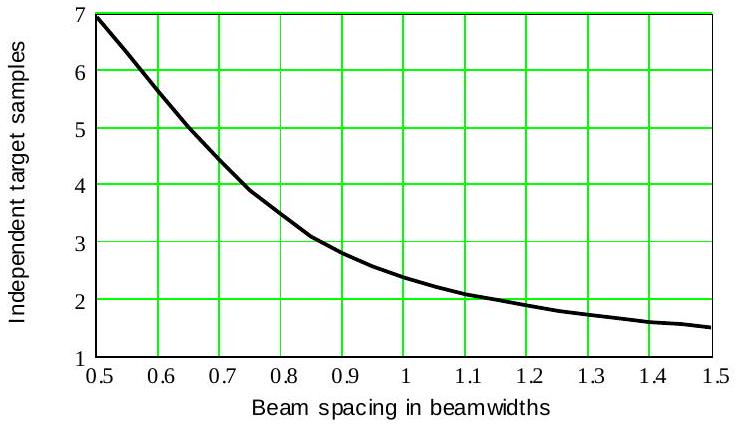
图5.34 三角网格中独立目标样本数量随波束间距变化。
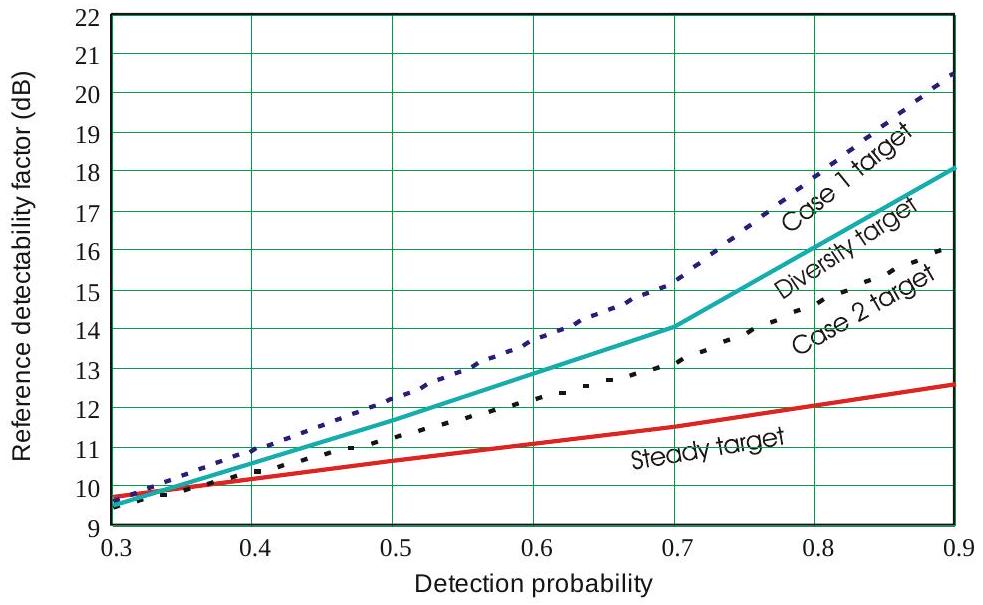
图5.35 三角网格参考可探测性因子 \(D_{r\{0,1,2, D\}}(P_d)\),\(Delta_k=1\)。
5.5.4.1 Case 2的积分处理¶
Case 2的积分处理波束形状损失如图5.36所示。损失略高于Case 1,因为样本不包含用于计算参考可探测性因子的所有独立目标样本。
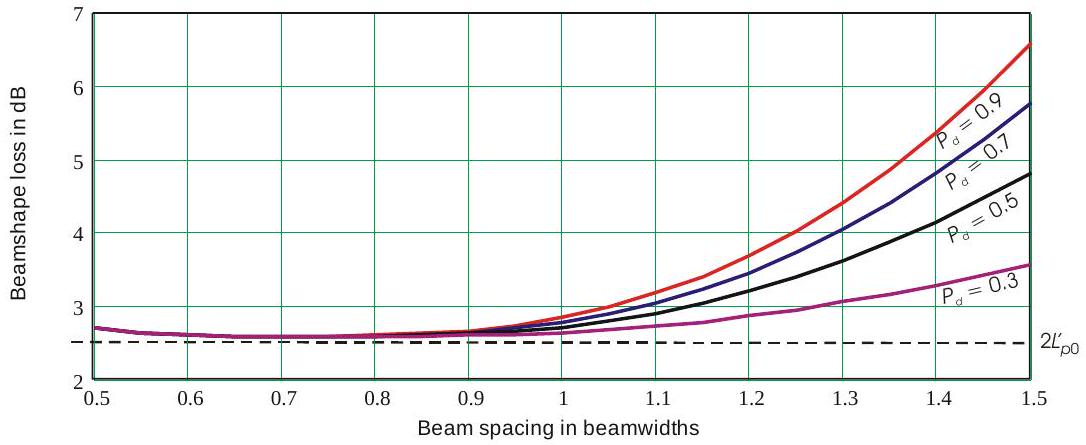
图5.36 Case 2积分处理下的波束形状损失\(L_{p T 2}\) 与采样间距\(Delta_k\) 的关系。
5.5.4.2 Case 2的累积检测处理¶
Case 2的累积检测损失如图5.37所示。对于\(Delta>1\),所有\(P_d\)下的损失均低于矩形网格。
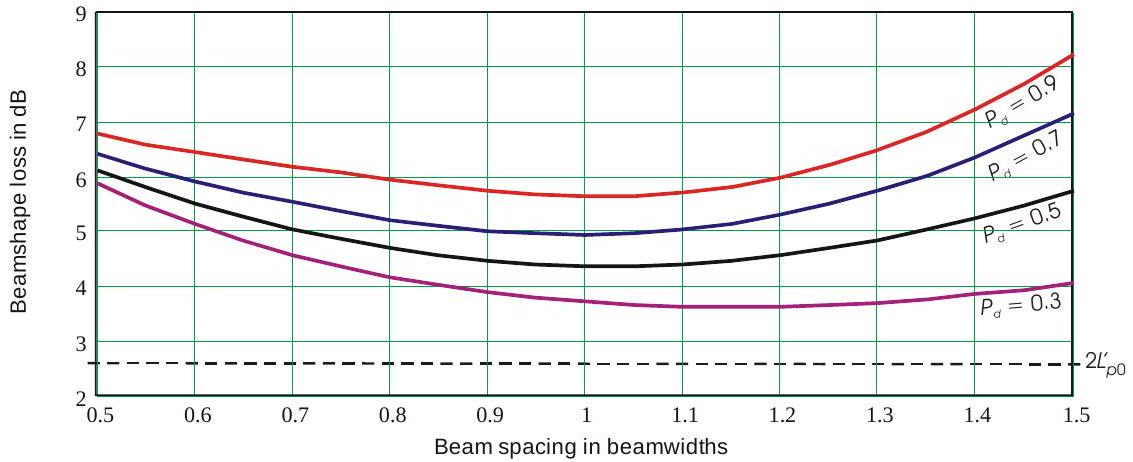
图5.37 Case 2累积检测下的波束形状损失 \(L_{p T 2}\) 与采样间距\(Delta_k\) 的关系。
5.5.4.3 Case 2的混合处理¶
图5.38显示了Case 2混合处理的损失。对于\(Delta>1\),损失也低于矩形网格。
5.5.5 三角网格的多样性目标波束形状损失¶
多样性目标的波束形状损失如图5.39-5.41所示,覆盖三种处理方法。在每种情况下,损失与Case 1目标相似,如图5.36-5.39所示。

图5.38 Case 2混合处理下的波束形状损失 \(L_{p T 2}\) 与采样间距 \(Delta_k\) 的关系。
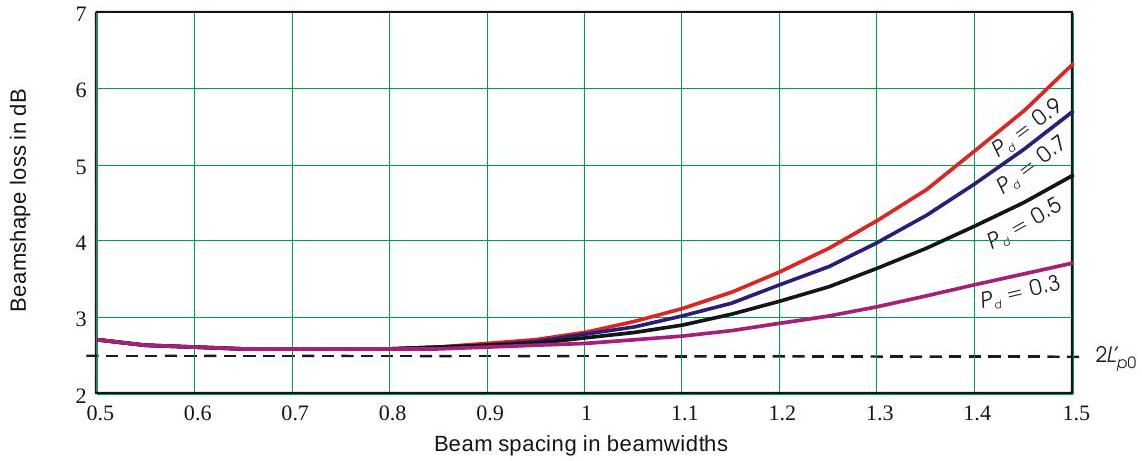
图5.39 多样性目标积分处理下的波束形状损失 \(L_{p T 2}\) 与采样间距\(Delta_k\)的关系。

图5.40 多样性目标累积检测下的波束形状损失 \(L_{p T 2}\) 与采样间距\(Delta_k\) 的关系。
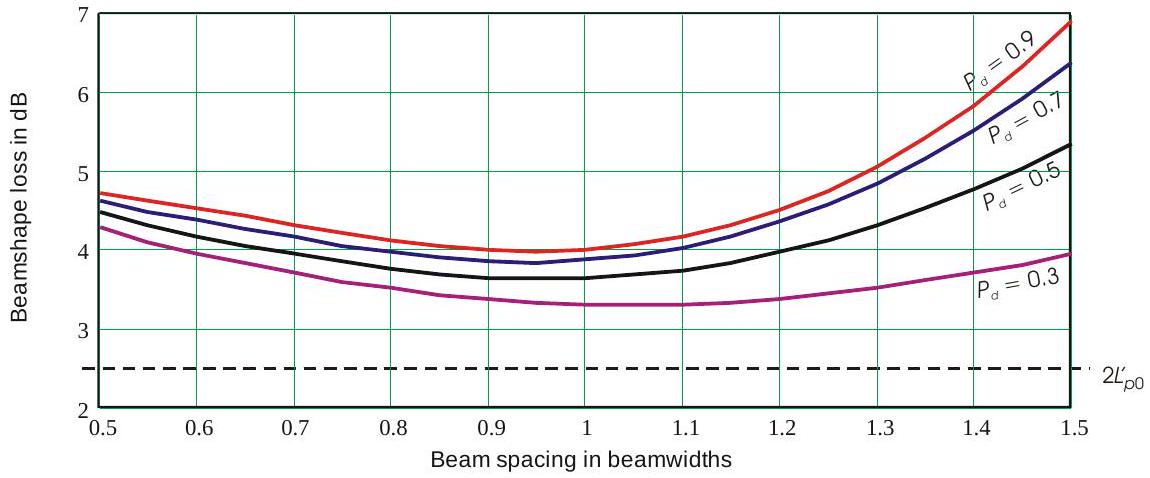
图5.41 多样性目标混合处理下的波束形状损失 \(L_{p T 2}\)与采样间距 \(Delta_k\)的关系。
5.5.6 三角网格搜索雷达方程中的波束形状损失¶
在搜索雷达方程中,净波束形状损失是基于在扫描过程中保持恒定能量的前提下随着波束间距变化而计算的。对于多样性目标及三种处理方法,该损失如图5.42-5.44所示。对于该目标模型的结果与Case 1和Case 2大致相等,为估算不同样本间距的影响提供了依据。
从图5.42-5.44可得出的主要结论是,在搜索雷达方程中用于二维扫描(三角网格)的净波束形状损失必须显著大于通常用于密集采样的\(L_{p 2}=1.77=2.48~\mathrm{dB}\)。在常规间距约为0.71波束宽度时,损失范围为混合处理约7.5 dB,累积检测约8.5 dB。要达到最小损失 \(2-4~\mathrm{dB}\),需要将间距增加至约1.3波束宽度。如此大的间距会降低角度估计精度,但会显著缩短扫描给定搜索体积所需的时间。这在多功能雷达中可能是一种优势,尤其是在初次探测后立即进行跟踪采集的情况下。
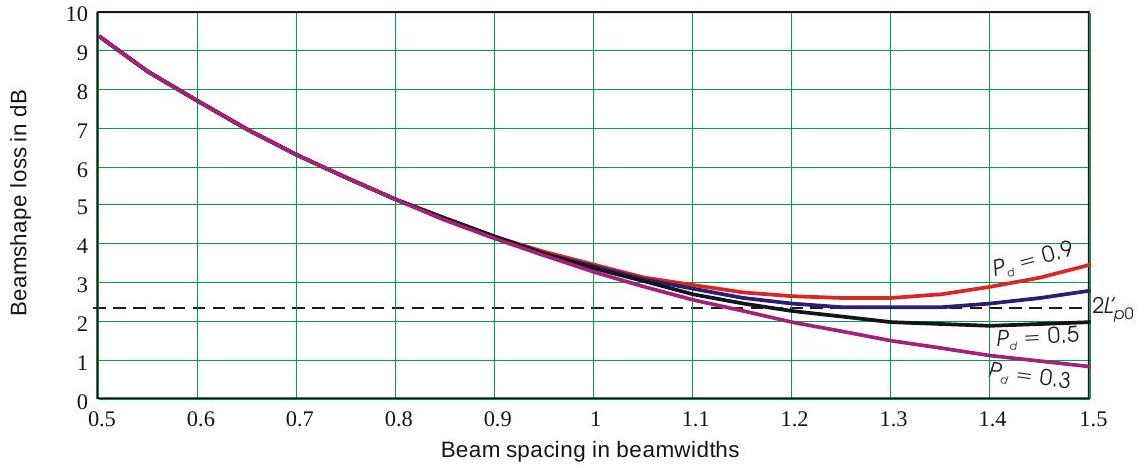
图5.42 多样性目标积分处理下的净波束形状损失 \(L_{p T n 2}\) 与采样间距\(Delta_k\) 的关系。

图5.43 多样性目标累积检测下的净波束形状损失\(L_{p T n 2}\)与采样间距\(Delta_k\)的关系。

图5.44 多样性目标混合处理下的净波束形状损失 \(L_{p T n 2}\)与采样间距 \(Delta_k\)的关系。
5.6 波束形状损失总结¶
5.6.1 密集采样的波束形状损失¶
在扫描坐标中,样本间距\(Delta<0.71\)波束宽度被视为密集采样。对于任何目标类型,使用积分或累积检测处理时,一维密集采样损失为\(L_{p 0}=1.33=1.24~\mathrm{dB}\)。二维扫描时,损失为 \(L_{p 2}=L_{p 0}^{2}=1.77=2.48~\mathrm{dB}\)。单独积分损失(参见第4.4.3节)、积分器加权损失或累积检测损失(第10.2.5节)包含在雷达方程的常用形式中。
5.6.2 稀疏采样的波束形状损失¶
在扫描坐标中,样本间距 \(Delta>0.71\) 波束宽度被视为稀疏采样。稀疏采样的损失是间距\(Delta\)、检测概率 \(P_d\)、目标类型及处理方法的函数。
5.6.2.1 一维扫描¶
图5.45和5.46展示了稳态目标与Case 1波动目标在积分和累积检测下的一维波束形状损失变化。对于稀疏采样,稳态目标的损失对 \(P_d\)的依赖性明显大于Case 1。
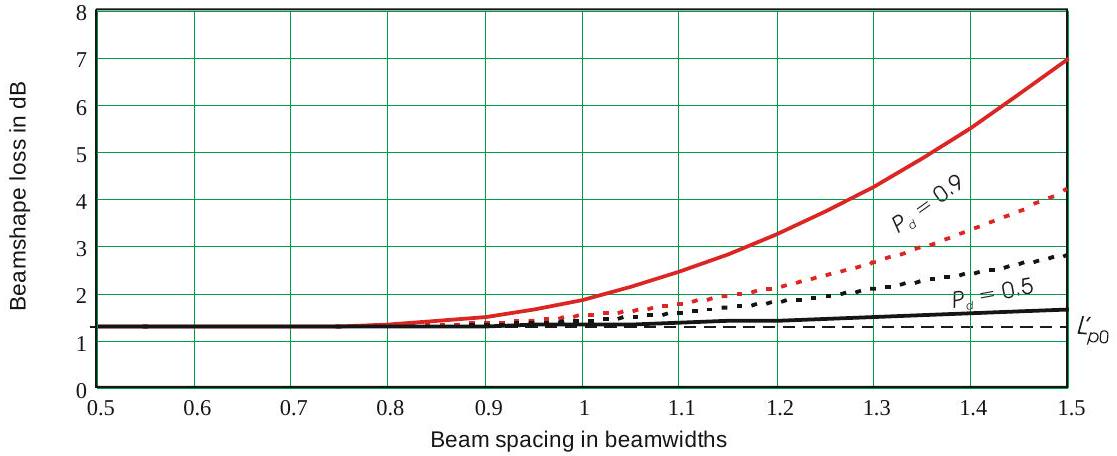
图5.45 一维扫描积分处理下稳态目标(实线)与Case 1(虚线)波束形状损失 \(L_{p 1}\)与采样间距 \(Delta_k\)的关系。
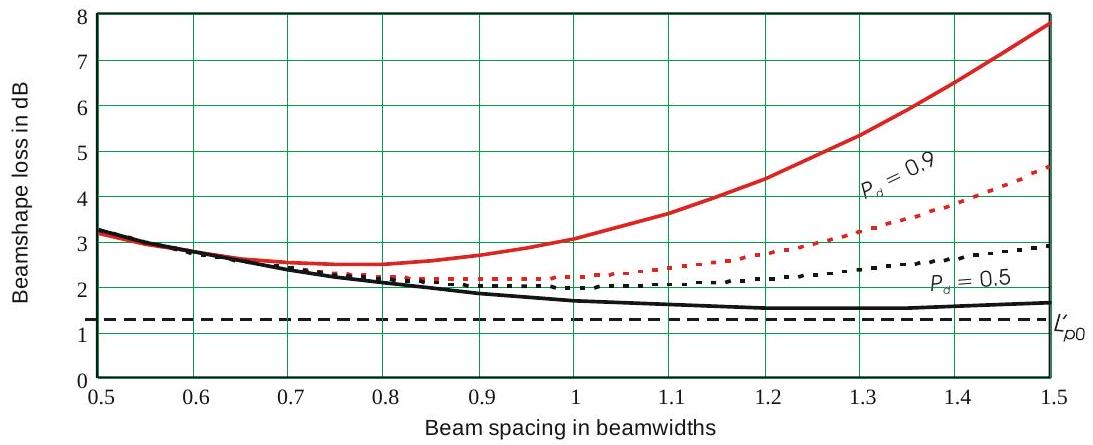
图5.46 一维扫描累积检测下稳态目标(实线)与Case 1(虚线)波束形状损失\(L_{p 1}\)与采样间距 \(Delta_k\)的关系。
5.6.2.2 矩形网格二维扫描¶
二维矩形网格扫描的波束形状损失如图5.47和5.48所示,分别为积分和累积检测。对于高 \(P_d\),损失约为对应一维损失的平方(分贝值加倍)。对于\(P_d=0.5\) 的稳态目标,二维损失超过了该关系。
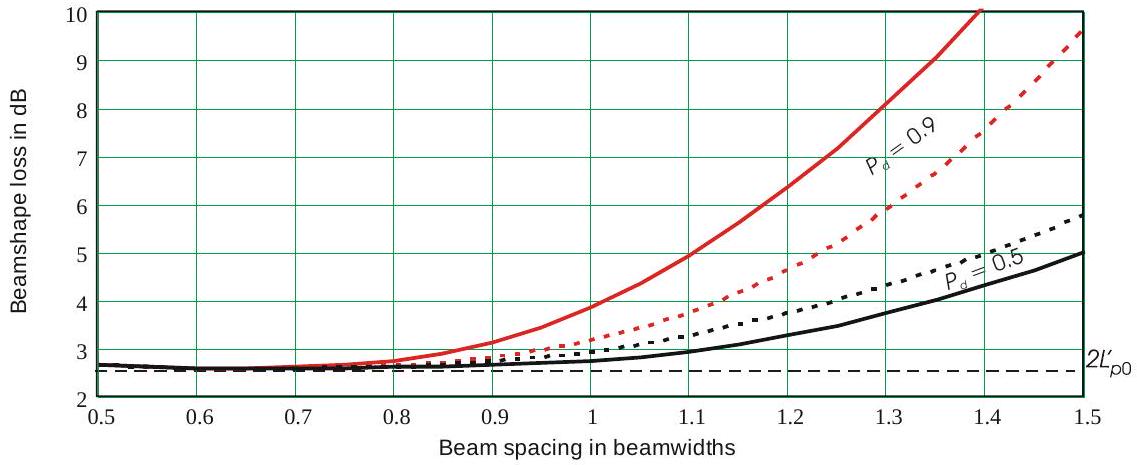
图5.47 矩形网格二维扫描积分处理下稳态目标(实线)与Case 1(虚线)波束形状损失 \(L_{p 2}\) 与采样间距 \(Delta_k\)的关系。
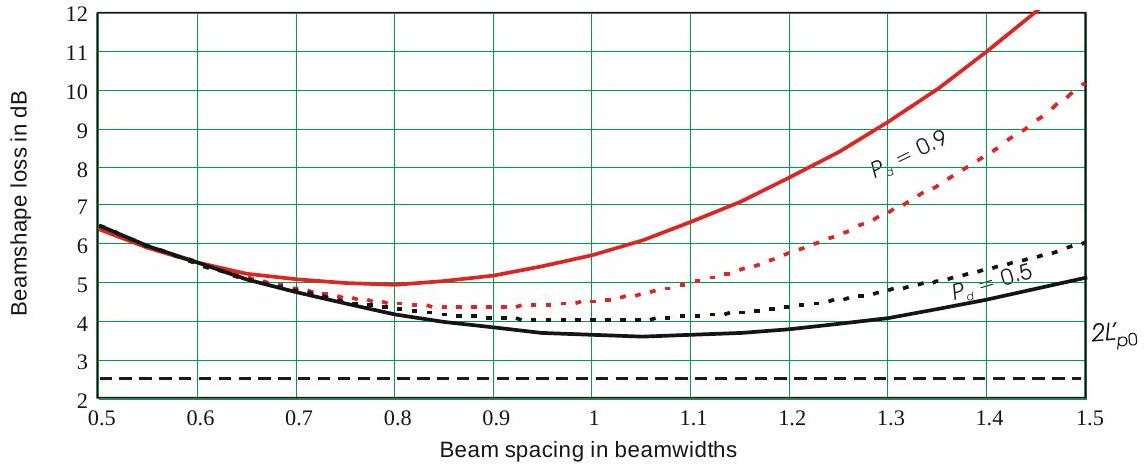
图5.48 矩形网格二维扫描累积检测下稳态目标(实线)与Case 1(虚线)波束形状损失\(L_{p 1}\)与采样间距\(Delta_k\)的关系。
5.6.2.3 三角网格二维扫描¶
在等边三角形网格上布置波束,快速扫描坐标的扫描线沿 \(x\) 方向错开半个间距,而另一坐标方向的间距为 \(\sqrt{0.75}\) 波束宽度,可以显著减少波束形状损失。为了获得给定波束轴信噪比所需的能量仅增加约 0.6 dB。稀疏采样的损失增加远比矩形网格慢,尤其在高 \(P_d\) 下,如图5.49和5.50所示。在这些图中,参考可探测性因子已调整以考虑额外能量的需求,因此在向密集采样过渡时,积分处理的损失仍为 \(2 L_{p 0}=2.48~\mathrm{dB}\)。对于稳态目标,两种网格间的差异比Case 1更加显著。
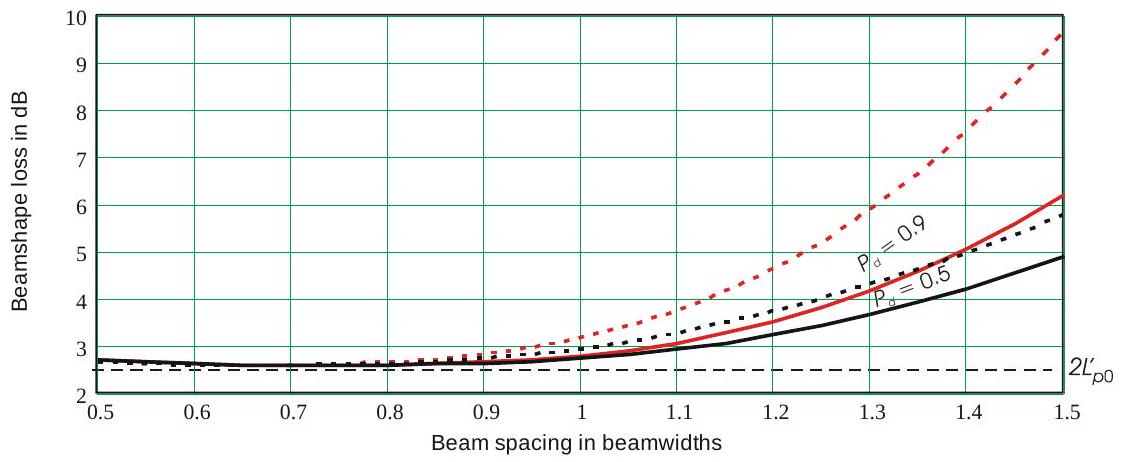
图5.49 三角网格二维扫描积分处理下,Case 1波束形状损失 \(L_{p 2}\) 与采样间距 \(\Delta_k\) 的关系(实线:三角网格,虚线:矩形网格)。
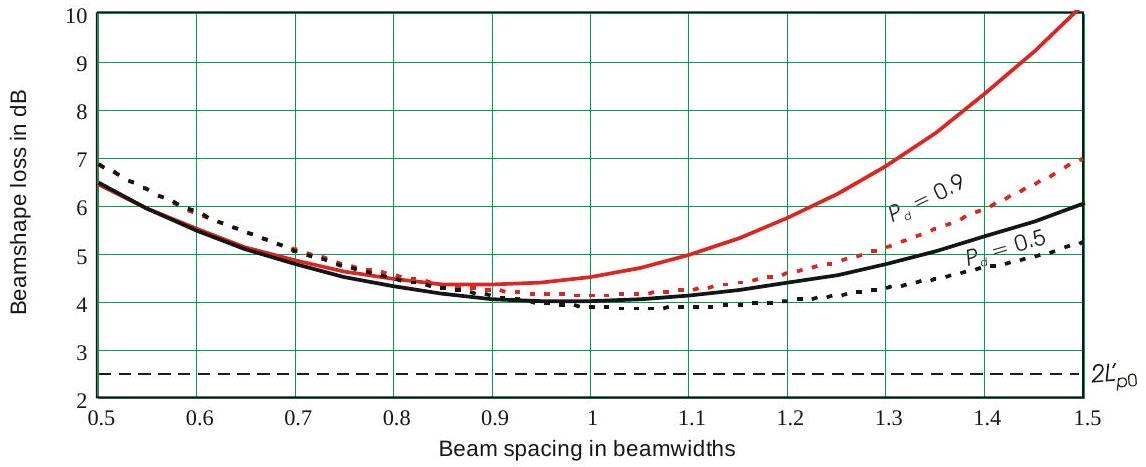
图5.50 三角网格二维扫描累积检测下,Case 1波束形状损失 \(L_{p 2}\) 与采样间距 \(\Delta_k\) 的关系(实线:三角网格,虚线:矩形网格)。
5.6.3 处理方法¶
在波束形状损失计算中考虑了三种处理方法:对每个波束驻留时间的样本进行积分、将每次驻留的检测概率组合成累积检测概率,以及(二维扫描)混合处理,即对每条扫描线积分后的信号进行检测,再对连续扫描线的结果进行累积检测。
显然,积分处理(相干或非相干)是三种方法中效率最高的,但对于覆盖大区域的二维扫描可能无法实现。当扫描每条线所需时间超过目标的相关时间(参见第4.5.2节),则无法对多条线进行相干积分。当单条线扫描时间超过目标在距离或多普勒分辨单元内停留时间时,即使是非相干积分也变得困难。可以对跟随目标动态的一串单元进行积分(称为回溯或“先跟踪后检测”处理),但这需要比在每个单元内的常规积分更高的处理能力。因此,可以采用混合处理方案。
混合处理对每条扫描线进行积分,但通过累积检测将连续扫描线的结果组合起来。由于目标通常只出现在两到三条扫描线中,累积处理带来的损失适中(参见第10.2.5节)。使用此方法绘制的波束形状损失图包括累积检测损失。当间距 \(\Delta=0.5\) 波束宽度时,基本上有四个波束包含显著目标能量(每条线两个,共两条线)。线内积分增益接近 3 dB,累积过程再增益 1-1.5 dB,相对于理想积分,累积损失剩余 1.5-2 dB。因此,绘制结果显示 \(\Delta=0.5\) 时总波束形状损失为 4-4.5 dB,其中基本密集采样损失为 \(2 L_{p 0}=2.5~\mathrm{dB}\)。
效率最低的处理方法是在每次驻留时间内直接做检测决策,不进行驻留间记忆,但通过包含目标信号的所有驻留累积检测概率增加。曲线通常显示总波束形状损失为 6 dB,其中基本密集采样损失 \(2 L_{p 0}=2.5~\mathrm{dB}\),其余 3.5 dB 归因于累积过程。
并非所有扫描模式都使用规则栅格,如矩形或三角网格。跟踪雷达的搜捕扫描可能使用以指定目标位置为中心的任意波束簇。一般而言,这类扫描的波束形状损失可根据三角二维扫描网格的数据估算(例如图5.31-5.44),结合采样间距和信号组合的处理方法。
5.6.4 搜索雷达方程中的净波束形状损失¶
在搜索雷达方程的损耗预算中,净波束形状损失 \(L_{p n 1}\)(第5.3.5节)或 \(L_{p n 2}\)(第5.4.6节、第5.5.6节)取代了 \(L_{p 0}\) 或 \(L_{p 2}\) 与累积检测损失的乘积。其结果是将本总结中绘制的损失值乘以一个因子:\(1 / \Delta\)(一维扫描)、\(1 / \Delta^{2}\)(矩形网格二维扫描)、或 \(1 / \sqrt{0.75} \Delta^{2}\)(三角网格二维扫描)。这样就增加了在通常使用的采样间距 \(\Delta<1\) 下净波束形状损失的贡献。例如,在 \(\Delta=0.71\) 时,一维扫描的损失不再是 \(L_{p 0}=1.24~\mathrm{dB}\),而是 \(L_{p n}=3-4~\mathrm{dB}\),具体取决于目标模型和处理方法(参见图5.10-5.13)。二维扫描中这些值增加到 \(L_{p n}^{2}=6-12~\mathrm{dB}\)(参见图5.26-5.29及5.42-5.44),远高于 \(L_{p 0}^{2}=2.48~\mathrm{dB}\)(或Blake工作得出的3.2 dB)。部分净波束形状损失可归因于累积检测的考虑。
在所有情况下,最小净波束形状损失出现在 \(\Delta \geq 1\),即使 \(P_d \rightarrow 0.9\),这表明稀疏采样比传统的 \(\Delta \approx 0.71\) 更为高效。然而,如前所述,这种效率可能会牺牲目标数据的角度精度。
5.6.5 非等间距二维扫描的波束形状损失¶
上述所有二维波束形状损失数据均基于假设:两个坐标方向的采样间距相等或处于等边三角形格点上。如果不满足该条件,可通过以下两种方式近似估计损失。对于矩形网格,损失大约为两个采样间距的一维损失值的乘积(分贝值相加)。对于三角网格,可通过对两个采样间距计算出的二维损失分贝值取平均来估算损失。
如果需要更精确的数据,可修改第5.4.1节、第5.4.2节及第5.5.1节中描述的程序,以包含两个采样间距。
参考文献¶
[1] IEEE Standard 100, The Authoritative Dictionary of IEEE Standards Terms, 7th ed., New York: IEEE Press, 2000.
[2] Blake, L. V., "The Effective Number of Pulses Per Beamwidth for a Scanning Radar," Proc. IRE, Vol. 41, No. 6, June 1953, pp. 770-774.
[3] Blake, L. V., "Addendum to 'Pulses Per Beamwidth for Radar,'" Proc. IRE, Vol. 41, No. 12, December 1953, p. 1785.
[4] Blake, L. V., "Recent Advancements in Basic Radar Range Calculation," IRE Trans. on Military Electronics, Vol. MIL-5, No. 2, April 1961, pp. 154-164.
[5] Hall, W. M. and Barton, D. K., "Antenna Pattern Loss Factor for Scanning Radars," Proc. IEEE, Vol. 53, No. 9, September 1985, pp. 1257-1258.
[6] Hall, W. M., "Antenna Beam-Shape Factor in Scanning Radars," IEEE Trans. on Aerospace and Electronic Systems, Vol. AES-4, No. 3, May 1968, pp. 402-409.
[7] Barton, D. K. and Barton, W. F., Modern Radar System Analysis Software and User's Manual Version 2.0, Norwood, MA: Artech House, 1993.
[8] Barton, D. K., Radar System Analysis and Modeling, Norwood, MA: Artech House, 2005.
[9] Barton, D. K., Modern Radar System Analysis Software and User's Manual, Version 3.0, Norwood, MA: Artech House, 2005.
[10] Doviak, R. J. and Zrnic, D. S., Doppler Radar and Weather Observations, 2nd ed., New York: Academic Press, 1993.
Appendix 5A 分析近似波束形状损失¶
虽然第 5.3.1–5.3.7 节给出的计算方法可准确估计波束形状损失,但在雷达分析程序中可能耗时过长。以下近似公式旨在匹配由余弦加权矩形孔径形成的波束计算出的波束形状损失。使用余弦加权矩形孔径而非高斯波束,是因为它更能体现稀疏采样导致的主瓣两侧快速衰减时的损失增加。近似公式可在 0.1–0.2 dB 内匹配前述各情况的计算值,并在间距 \(\Delta \rightarrow 0.71\) 时与密集采样值合并。带撇号的符号表示分贝值,1-D 扫描密集采样值记为 \(L_{p0}^{\prime}\)。
5A.1 一维波束形状损失¶
对于 \(\Delta>0.71\) 使用下列公式;对于 \(\Delta \le 0.71\),取 \(L_{p1}^{\prime} = L_{p0}^{\prime} = 1.24~\mathrm{dB}\)。
5A.1.1 稳定目标积分处理的近似公式¶
5A.1.2 稳定目标累积检测的近似公式¶
在随后的方程中,项 \(C\left(P_{d}, \Delta\right)\) 表示间距 \(\Delta\) 与给定 \(P_{d}\) 时最小损失间距之间的差值。损失遵循不同的函数 \(A\left(P_{d}, \Delta\right)\),针对该项的正负值分别定义。
5A.1.3 Case 1 目标积分处理的近似公式¶
5A.1.4 Case 1 目标累积检测的近似公式¶
5A.1.5 Case 2 目标积分处理的近似公式¶
5A.1.6 Case 2 目标累积检测的近似公式¶
用于搜索雷达方程的净波束形状损耗,对于上述所有情况为:
5A.2 具有矩形网格的二维波束形状损耗¶
二维波束形状损耗以 dB 表示,记为 \(L_{p 2}^{\prime}\)。所有公式适用于 \(\Delta>0.71\);若 \(\Delta \leq 0.71\),则 \(L_{p 2}^{\prime}=2 L_{0}^{\prime}=2.48\)。
5A.2.1 稳定目标积分处理的近似公式¶
5A.2.2 稳定目标累积检测的近似公式¶
5A.2.3 稳定目标混合处理的近似公式¶
5A.2.4 Case 1 目标积分处理的近似公式¶
5A.2.5 Case 1 目标累积检测的近似公式¶
5A.2.6 Case 1 目标混合处理近似公式¶
5A.2.7 Case 2 目标积分处理近似公式¶
5A.2.8 Case 2 目标累积检测近似公式¶
5A.2.9 Case 2 目标混合处理近似公式¶
5A.2.10 Diversity 目标积分处理近似公式¶
5A.2.11 Diversity 目标累积检测近似公式¶
5A.2.12 Diversity目标混合处理近似公式¶
注意:用于搜索雷达方程的净天线形状损失为
5A.3 2-D 三角格扫描天线形状损失¶
记为 \(L_{p T 2}^{\prime}\),适用于 \(\Delta>0.71\),否则 \(L_{p T 2}^{\prime}=2 L_{0}^{\prime}=2.48\)。
5A.3.1 Steady Target 积分处理近似公式¶
5A.3.2 Steady Target 累积检测近似公式¶
5A.3.3 Steady Target 混合处理近似公式¶
5A.3.4 Case 1 积分处理近似公式¶
5A.3.5 Case 1 累积检测近似公式¶
5A.3.6 Case 1 混合处理近似公式¶
5A.3.7 Case 2 积分处理近似公式¶
5A.3.8 Case 2 累积检测近似公式¶
5A.3.9 Case 2 混合处理近似公式¶
5A.3.10 Diversity Target 积分处理近似公式¶
5A.3.11 Diversity Target 累积检测近似公式¶
5A.3.12 Diversity Target 混合处理近似公式¶
注意:所有这些 2-D 三角网格的公式用于搜索雷达方程时,其净波束形状损失为: