第9章 杂波与信号处理¶
第3章给出了在杂波和干扰与热噪声共同构成干扰时的最大探测距离雷达方程。在这些方程中,所用的有效干扰谱密度 \(I_{0 e}\) 是热噪声、杂波和干扰三者密度的总和。在此语境下,“有效”指的是能够对探测概率产生与实际干扰分量相同影响的白高斯干扰的密度,而实际干扰的谱密度可能并不均匀,其幅度概率密度函数也可能比正态分布更宽。
本章将介绍表面、体积以及离散杂波的模型,用于确定它们在接收机输入端的能量水平,以及它们相对于白高斯噪声的统计偏离程度,这些均作为雷达到目标距离的函数。这些模型具有普遍性。文中还给出了相关文献的引用,这些文献更详细地讨论了不同类型杂波的特性,据此在必要时可以构建更加精细的模型,并根据特定环境的认知加以合理化。
大多数雷达都包含某种特殊的信号处理方式,以尽量减小输出端显示或检测电路中的杂波。这类电路的作用在第3章雷达方程中通过杂波改善因子 \(I_{m}\) 得到体现,其计算方法将在第9.6节中讨论。
9.1 表面杂波模型¶
9.1.1 杂波散射截面与反射率¶
第3.3节讨论了由安装在地表或高于地表的雷达主瓣所观察到的表面杂波几何特性。雷达散射截面由雷达分辨单元内表面积 \(A_{c}\) 与固有表面杂波反射率 \(\sigma^{0}\) 的乘积给出:
其中,表面积 \(A_{c}\) 由式 (3.18) 给出。
反射率最好建模为固有杂波反射率 \(\gamma\) 与雷达波束到达表面时的局部掠射角 \(\psi\) 的正弦的乘积:
该常数- \(\gamma\) 模型在与第9.1.2节中讨论的杂波传播因子结合使用,并且 \(\psi\) 不接近 \(90^{\circ}\) 时通常适用。由(9.1)和(9.2)所描述的反射率源于雷达波与小尺度表面特征相互作用,这些特征会将入射波的一小部分散射回源端。为了描述当 \(\psi \rightarrow 0\) 时杂波的持续存在,有时在(9.2)中加上一个数量级约为 \(10^{-6}\) 的小常数,或如文献 [1, p. 405] 中所述,在掠射角 \(\psi\) 上加上 0.0001 弧度的增量。这些方程不适用于由支持镜面反射的表面散射的情况,例如第3.5节讨论的某些人造目标所导致的离散杂波,或接近垂直入射时的表面杂波。
当接近垂直入射时,海面和陆地表面也会产生镜面反射分量,此时必须在 \(\sigma^{0}\) 中加上一个面元分量 \(\sigma_{f}^{0}\),以考虑来自表面小面元的准镜面反射 [2, p. 108, Eq. (3.32)]:
其中
产生镜面反射的面元角 \(\beta\) 等于观察到该面元时相对于垂直方向的角度。典型海面和陆地表面的 \(\beta_{0}\) 值约为 0.05 弧度,因此当 \(\rho_{0} \rho_{v} \approx 1\) 时,海面和裸露地面的面元分量会在 \(\psi=\pi / 2=90^{\circ}\) 附近产生一个峰值幅度约为 \(1 / \beta_{0}^{2}\)、角宽约为 \(\beta_{0}\) 的尖锐峰值。这将在第9.2.2节和第9.3.1节关于海面与陆地反射率的图表中加以说明。
大多数实测数据并未显示由(9.3)预测的大幅峰值,这是因为测量天线的波束宽度在接近或超过 \(\beta_{0}\) 的角度范围内观测表面,从而将测得的 \(\sigma^{0}\) 平均到超过窄准镜面瓣的角度上。测量波束宽度 \(\theta_{3}\) 与面元坡度偏差的卷积导致了测得的反射率与图形传播因子 \(F_{c}^{4}\) 的乘积表达式(该因子将在下一节进一步讨论,但此处代表天线方向图积分的结果)[2, p. 109, Eq. (3.23)]:
该方程同样适用于预测波束宽度为 \(\theta_{3}\) 的雷达在接近垂直入射时的杂波。
9.1.2 表面杂波方向图传播因子¶
当雷达与杂波之间的传输路径偏离自由空间条件时,诸如(3.4)式中的杂波雷达方程需要在双程路径上引入杂波方向图传播因子 \(F_{c}\) 以及大气衰减 \(L_{\alpha c}\)。\({ }^{1}\) 导致 \(F_{c}\) 偏离自由空间传播的因素包括:直射波与从路径下方表面前向反射波之间的干涉,以及靠近地表路径的衍射。为简化起见,通常假设在干涉区直射波与反射波的天线方向图项 (8.9) 和 (8.10) 相等。这允许以下讨论采用一个记作 \(F_{c}^{\prime}\) 的杂波传播因子,同时将指向表面的天线方向图因子 \(f\left(-\theta_{r}-\theta_{b}\right)\) 单独列出,以便在特定雷达及其波束俯仰角中应用。
\({ }^{1}\) Blake 在 [2, p. 27, Eq. (1.44)] 中指出:“因子 \(F_{c}^{4}\) 被省略,因为按照惯例它已包含在 \(\sigma^{0}\) 的评估中。”本文将其视为一个单独因子。
表面杂波反射率的测量实际上是 \(\sigma_{c} F_{c}^{4}\) 的乘积。因此,若要将 \(\sigma^{0}\) 建模并应用于其他雷达和传输路径,就必须已知适用于测量几何与天线的 \(F_{c}^{4}\) 值。为了解释构成本章第9.2–9.4节模型的实测数据,假设在计算报告的反射率时已经考虑了天线方向图效应,并且报告的 \(\sigma^{0}\) 实际上是 \(\sigma_{c} F_{c}^{\prime 4}\) 的乘积,除非在少数情况下 \(F_{c}^{\prime}\) 被明确作为单独因子处理。
根据雷达到杂波的距离,可以划分出五个表面杂波测量与建模的区域,按距离递增顺序如下:
- 天顶区(机载雷达),适用(9.3)或(9.4);
- 近区 \({ }^{2}, R<R_{1}\),存在清晰路径,\(F_{c}^{\prime} \approx 1\);
- 干涉区,\(R_{1}<R<R_{\delta}\),反射波与直射波发生干涉;
- 中间区,\(R_{\delta}<R<R_{h}\),干涉与衍射均有影响;
- 衍射区,\(R_{h}<R\),衍射占主导。
\({ }^{2}\) Blake 称其为平台区,但该平台具有明确斜率,此时 \(\sigma^{0}\) 与掠射角成正比。
图9.1展示了地基雷达从上述后四个区域观察杂波的几何关系(第一个区域仅适用于机载雷达)。
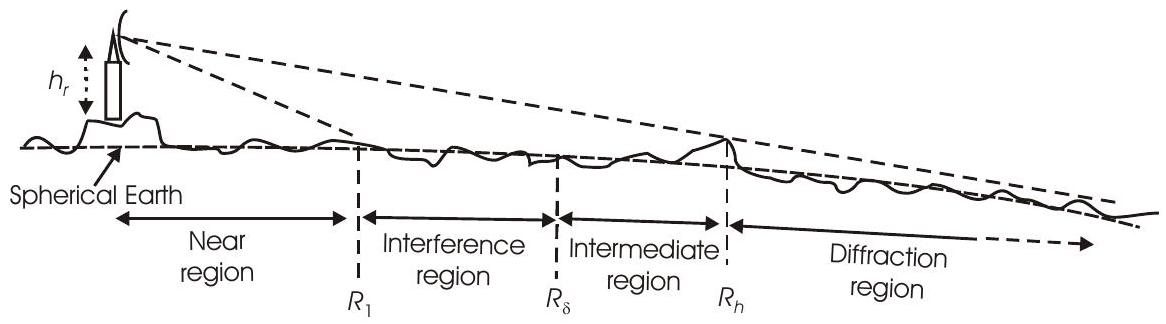
图9.1 地基雷达的表面杂波传播区域。
近区与干涉区的分界出现在距离 \(R_{1}\) 处,此时
解该二次方程得 \(R_{1}\):
其中 \(h_{r}^{\prime}=h_{r}+2 \sigma_{h}\) 为天线相位中心高于平均表面的高度,\(h_{r}\) 为相位中心高于天线下方表面的高度,且该表面假定高于平均表面 \(2 \sigma_{h}\)。该近似式适用于平地模型,这对低架设雷达通常已足够:
在距离 \(R_{1}\) 处,电波以临界掠射角到达地表:
\({ }^{3}\) Blake 给出的公式为 \(\sin ^{-1}\left(\lambda / 5 h_{\mathrm{av}}\right)=\sin ^{-1}\left(\lambda / 13 \sigma_{h}\right)\),与(9.8)基本一致。
在该临界角下,镜面散射系数 \(\rho_{s}\)(见式(8.57))为 0.607,反射功率 \(\rho_{s}^{2}\) 为光滑表面的 \(1/e\)。
若已知指向地表杂波的俯角 \(\theta\) 而非距离,则掠射角可由 [3, p. 312, Eq. (7.34)] 计算:
图9.2展示了在 X 波段和 L 波段雷达、\(\sigma_{h}=1 \mathrm{~m}\) 条件下,近区与远区的传播因子。刚超过过渡距离时,会形成一个反射瓣,但在更短距离处由于较大掠射角导致 \(\rho_{s}\) 减小而消失。这两个区域内的完整杂波传播因子由(8.9)式导出,并令天线方向图项 \(f(\theta)=1\):
虚线表示 \(F_{c}\) 的近似值:
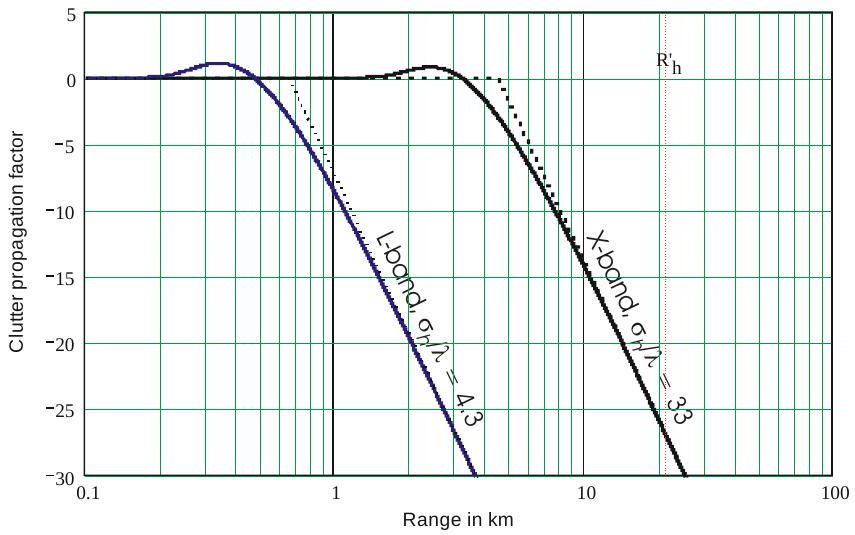
图9.2 杂波传播因子 \(F_{c}^{\prime}\)(实线)及其近似值(虚线),对应近区和干涉区。绘制条件:\(\sigma_{h}=1 \mathrm{~m}, h_{r}=10 \mathrm{~m}, \lambda=0.03 \mathrm{~m}\),此时 \(R_{1}=4.5 \mathrm{~km}, \psi_{c}=0.14^{\circ}\);\(\lambda=0.23 \mathrm{~m}\),此时 \(R_{1}=0.65 \mathrm{~km}, \psi_{c}=1.0^{\circ}\);且 \(\rho_{0} \rho_{v}=1\)。地平线距离 \(R_{h}=21.5 \mathrm{~km}\)。
在该近似下,\(F_{c}^{\prime 4}\) 的积分面积比精确值大约高出 \(10 \%\),这意味着采用近似计算的杂波能量估计值比精确值高约 0.4 dB。
远区与中间区的分界出现在距离 \(R_{\delta}\) 处,此时衍射效应开始出现:
其中 \(h_{c} \approx 3 \sigma_{h}\) 为主要杂波散射体高于平均表面的高度。在图9.2所示条件下,X波段时 \(R_{\delta}=8.9 \mathrm{~km}\),L波段时 \(R_{\delta}=1.8 \mathrm{~km}\)。超过这些距离后,\(F_{c}^{\prime}\) 的曲线将开始偏离干涉值,如后文所示。
对于超过 \(R_{\delta}\) 的范围,必须考虑光滑球面衍射和刀口衍射。衍射方程(8.63)–(8.75)适用,需将 \(h_{c}\) 代入 \(h_{t}\),除非地平线由高出平均表面至少 \(h_{\text{min}}\) 的障碍物形成(见式(8.75))。若表面随机粗糙度足够大,也可能满足刀口条件:
在图9.2条件下,X波段需 \(\sigma_{h}>13 \mathrm{~m}\),L波段需 \(\sigma_{h}>35 \mathrm{~m}\)。刀口衍射情况下,使用(8.71)–(8.75),并将 \(h_{c}\) 代入 \(h_{t}\)。
图9.3展示了在图9.2条件下,超过 \(R_{\delta}\) 后转为光滑球面衍射的影响。衍射项在中间区引起传播因子的轻微增加,随后在地平线附近及之后急剧下降。近区与干涉区的双段近似(9.11)及完整表达式(9.10)在地平线范围内通常足够,但在地平线之外会高估结果。
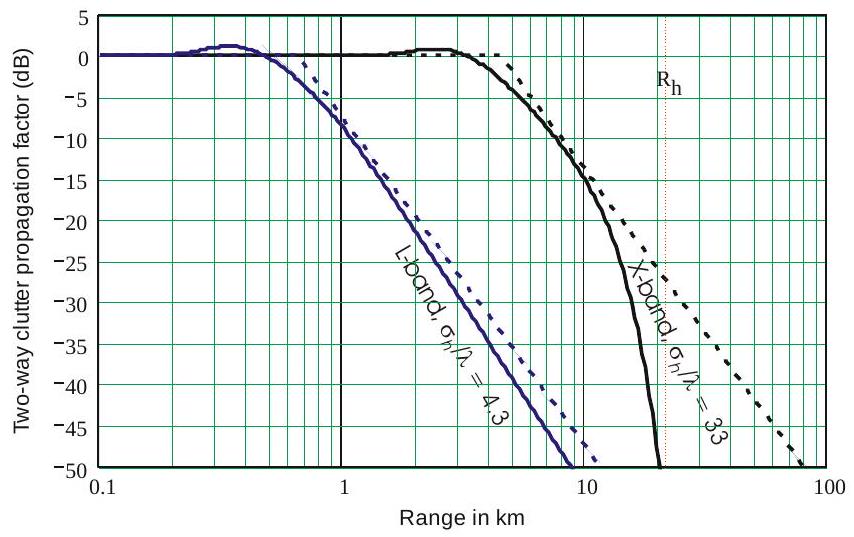
图9.3 杂波方向图传播因子(实线)及近似值(虚线),适用于近区、干涉区、中间区与衍射区。绘制条件:\(\sigma_{h}=1 \mathrm{~m}, h_{r}=10 \mathrm{~m}, \lambda=0.03 \mathrm{~m}\) 和 \(\lambda=0.23 \mathrm{~m}\),且 \(\rho_{0} \rho_{v}=1\)。地平线距离 \(R_{h}=21.5 \mathrm{~km}\)。
在某些情况下,天线旁瓣的表面杂波会造成干扰,而(9.1)中采用的(3.18)式面积 \(A_{c}\) 并未体现这种干扰。旁瓣在天线孔径前向或后向半球内所覆盖的面积为:
因此必须单独计算旁瓣杂波,以评估相应的改善因子,其结果可能不同于主瓣杂波。
在前向半球内,方向图传播因子为双程旁瓣电平与杂波传播因子的乘积:
其中 \(f_{t s f}\) 和 \(f_{r s f}\) 分别为发射与接收前向半球旁瓣的均方根电压增益,\(G_{t s f, \text {iso}}\) 和 \(G_{r s f, \text {iso}}\) 为相对于各向同性天线的对应功率增益。后向半球情况下,式(9.15)同样适用,但需用背瓣电平替代前向旁瓣电平。
旁瓣产生的杂波贡献通常远小于主瓣,但在以下情况之一出现时会变得重要:
- 在所考虑的距离上,主瓣未照射到地表;
- 主瓣杂波的多普勒频移允许其通过更大的改善因子抑制,而旁瓣杂波的多普勒频移不能达到同等抑制效果;
- 式(9.15)中乘以 \(F_{c}^{\prime 4}\) 的双程旁瓣增益比超过 \(\approx 0.1 \theta_{a} / \pi\);
- 旁瓣照射到地表的距离小于主瓣。
上述第二种和最后一种情况在中高脉冲重复频率(PRF)下运行的机载雷达中常见 [2, pp. 245–248],其杂波会在盲速区间 \(v_{b}=i f_{r} \lambda / 2\)(其中 \(i\) 为整数)上广泛分布。
9.1.3 表面杂波的谱特性¶
杂波频谱的形状以两种方式影响雷达方程:
- 改善因子 \(I_{m}\),即杂波能量通过信号处理器时的衰减程度,强烈依赖于杂波输入频谱的形状;
- 杂波可探测因子(见第 3.2.3 节),用于修正雷达方程中信号处理器输出端杂波采样的相关性,对输入谱密度与处理器响应函数的乘积非常敏感。
关于海杂波频谱的测量在 [4, p. 579] 中被报道为“近似呈高斯形状”。在林地环境下的地杂波测量显示其与高斯形状有偏差,但包含一个由零速度下的冲激函数表示的稳态分量。
Barlow 在其关于连续波雷达的早期论文 [5] 中,假设高斯频谱作为计算杂波效应的基础:
其中,\(W_{0}\) 是载波频率处的功率密度(单位 \(\mathrm{W} / \mathrm{Hz}\)),\(f\) 为多普勒频移,\(f_{0}\) 为载波频率,\(a\) 是无量纲的杂波谱宽参数。令 \(a=c^{2} / 8 \sigma_{v c}^{2}\) 并考虑可能存在的非零平均速度 \(v_{0}\),则该式可转化为速度谱功率密度形式:\({ }^{4}\)
其中,\(\sigma_{v c}\) 为杂波速度的标准差(单位 \(\mathrm{m} / \mathrm{s}\)),\(C\) 为杂波功率(单位 W)。平均速度可能来自于运动平台的观测,或风对海面的作用。[4] 及其后续文献报道的半功率谱宽值将在后续不同类型杂波的章节中讨论。
\({ }^{4}\) 我们用速度来表示杂波频谱,因为这是杂波散射体固有的属性,与雷达频率无关。
采用高斯形式表示固有杂波谱非常方便,因为它易于与由雷达参数引起的展宽分量相结合。这些展宽分量包括:
- 天线扫描调制分量
扫描中的雷达波束会用单程电压方向图函数(公式 (5.3))调制回波,该函数在时间 \(t\) 上变为双程功率函数:
其中,\(\omega_{s}\) 为扫描角速度(单位 \(\mathrm{rad} / \mathrm{s}\)),\(\theta_{3}\) 为扫描坐标下的波束宽度(单位 rad),并假设采用高斯波束近似。转换到频率域并转化为速度谱后,得到一个高斯速度谱分量,其标准差为:
其中,\(K_{\theta}=w \theta_{3} / \lambda \approx 1.2\) 为波束宽度常数(单位 rad),\(w\) 为扫描平面内孔径宽度(单位 m)。因此,该速度展宽与机械扫描孔径边缘速度或电子扫描相移速率成正比。
- 波束宽度分量 相对于雷达的杂波平均速度 \(v_{0}\) 会引入另一个展宽分量,其标准差为:\({ }^{5}\)
其中,\(\beta\) 为波束轴与相对速度矢量的夹角。
\({ }^{5}\) Nathanson [6] 给出了相同的表达式,即 \(0.42 v_{0} \theta_{2} \sin \beta\),其中 \(\theta_{2}\) 为双程半功率波束宽度。
当固有杂波谱为高斯分布时,总体速度展宽可表示为三个分量的均方根和:
若地杂波频谱中包含零速度(直流)冲激,则它会展宽为一个高斯分量,其功率等于该冲激功率,展宽 \(\sigma_{v 0}\) 为:
因此,杂波的总频谱是两个高斯分量之和:一个是包含直流功率的窄高斯分量(均方根展宽 \(\sigma_{v 0}\)),另一个是包含交流功率的宽高斯分量(展宽 \(\sigma_{v}\))。
正如第 9.3 节所讨论的,近期关于地杂波的研究表明,其频谱呈指数分布,而非高斯分布。此时,简单的公式 (9.17) 必须替换为指数型固有频谱与单位功率高斯函数(由 (9.22) 给出)卷积后的频谱,但其没有简洁的闭式表达式。结果频谱的衰减速度比相同半功率宽度的高斯谱更慢,导致基于多普勒处理器的改善因子下降。
当旁瓣或后瓣杂波达到显著水平时,其频谱具有一个波束宽度分量,该分量在 \(-v_{0}\) 到 \(v_{0}\) 的速度范围内展开,其幅度由对应的瓣结构包络决定。
9.1.4 表面杂波的幅度分布¶
杂波可探测因子(见第 3.2.3 节)还会修正雷达方程,以考虑杂波电压概率密度函数偏离瑞利分布(对应于两路正交高斯分量)的情况。对海面和地面杂波的测量研究,特别是在低于由公式 (9.8) 定义的临界掠射角条件下,或在高空间分辨率(小 \(A_{c}\))条件下进行的研究,发现其统计特性显著偏离高斯分布。用于描述表面杂波功率的分布族(概率密度函数)包括:
- Weibull 分布:一种双参数分布,表达式为
$$ \begin{equation} P(x)=\frac{x^{1 / a}}{a \alpha x} \exp \left(-\frac{x^{1 / a}}{\alpha}\right) ; \quad x \geq 0 \tag{9.23} \end{equation} $$
其中,\(a\) 为展宽(或形状)参数,用于决定分布宽度\({ }^{6}\),\(\alpha\) 为尺度因子。其均值、中值及其比值为:
$$ \begin{gather} \bar{x}=\alpha^{a} \Gamma(1+a) \tag{9.24}\ x_{50}=(\alpha \ln 2)^{a} \tag{9.25}\ \frac{\bar{x}}{x_{50}}=\frac{\Gamma(1+a)}{(\ln 2)^{a}} \tag{9.26} \end{gather} $$
其中,\(\Gamma\) 为伽玛函数。当 \(a=1\) 时,该分布退化为指数分布(对应于瑞利电压分布),其均值为 \(\bar{x}=\alpha\)。在杂波应用中,\(x\) 表示反射率与杂波传播因子的乘积 \(\sigma^{0} F_{c}^{4}\)。
\({ }^{6}\) Weibull 展宽参数在后文中记为 \(a_{w}\),此处为简洁起见记为 \(a\)。
- 对数正态分布(Lognormal 分布):一种双参数分布,可以用自然对数、常用对数或分贝表示,其中分贝形式在描述雷达目标和杂波时最为方便:
$$ \begin{equation} P\left(x_{\mathrm{dB}}\right)=\frac{1}{\sqrt{2 \pi} \sigma_{\mathrm{dB}}} \exp \left[-\frac{\left(x_{\mathrm{dB}}-\mu_{\mathrm{dB}}\right)^{2}}{2 \sigma_{\mathrm{dB}}^{2}}\right] \tag{9.27} \end{equation} $$
其中,若 \(x\) 表示功率项,则 \(x_{\mathrm{dB}}=10 \log x\),\(\sigma_{\mathrm{dB}}\) 为标准差,\(\mu_{\mathrm{dB}}\) 为 \(x_{\mathrm{dB}}\) 的均值(也是其中值)。其均值与中值功率及其比值为:
$$ \begin{gather} \bar{X}=10^{0.1 \mu_{\mathrm{dB}}+(0.005 \ln 10) \sigma_{\mathrm{dB}}^{2}} \tag{9.28}\ x_{50}=10^{0.1 \mu_{\mathrm{dB}}} \tag{9.29}\ \frac{\bar{X}}{x_{50}}=10^{(0.005 \ln 10) \sigma_{\mathrm{dB}}^{2}} \tag{9.30} \end{gather} $$
上式在分贝中可写为:
$$ \begin{equation} 10 \log \left(\frac{x_{a v}}{x_{50}}\right)=(0.05 \ln 10) \sigma_{\mathrm{dB}}^{2}=0.12 \sigma_{\mathrm{dB}}^{2} \tag{9.31} \end{equation} $$
- K 分布:一种双参数分布,用于描述杂波功率 \(x\),其表达式为:
$$ \begin{equation} P(x)=\frac{2 b^{(v+1) / 2} x^{(v-1) / 2}}{\Gamma(v)} K_{v-1}(2 \sqrt{b v}) ; \quad x \geq 0 \tag{9.32} \end{equation} $$
其中,\(v\) 为形状参数,\(b\) 为尺度参数,\(K\) 为修正贝塞尔函数(或 \(K\) 函数)。该分布的性质(主要应用于海杂波)在 [1, p. 279] 和 [6, p. 109] 中有详细描述。
当雷达分辨单元内包含大量可比拟的散射源时,表面杂波电压的概率密度函数趋近于瑞利分布(功率对应指数分布)。Schleher [7, p. 261] 给出的条件是分辨单元线性尺寸约为 75 m,对应脉冲宽度 \(\tau_{n} \geq 0.5 \mu \mathrm{s}\),以及方位波束宽度满足 \(\theta_{a} \geq 4.3 / R_{\mathrm{km}}\)(角度用度表示)。这些条件对空中警戒雷达通常满足,但用于跟踪、船舶导航和海上巡逻的雷达往往具有更小的分辨单元。
Barton [2] 建立了 Weibull 和对数正态分布展宽因子随 \(F_{c}^{\prime}\) 和分辨单元面积变化的模型,如图 9.4 所示。该模型揭示了掠射角减小对海杂波尖峰形成的重要影响。研究表明,即使分辨单元面积远大于 Schleher 标准所建议的 \(5,000 \mathrm{~m}^{2}\),展宽因子也会显著增加。

图 9.4 杂波概率密度函数展宽随不同分辨单元面积下平均传播因子的变化情况。
9.2 海杂波模型¶
用于表面杂波建模的若干参数,现在可应用于两类分布式表面杂波:海杂波与地杂波。
9.2.1 海面物理特性¶
Blake [3, pp. 306-308] 列出了用于描述海面物理特性的参数。波高定义为波峰与相邻波谷之间的垂直距离。通常假设海面高度 \(h\) 相对于其均值服从高斯分布:
其中,\(h\) 相对于平均海面测量,\(\sigma_{h}\) 为标准差。Blake 列出了波高的另外三种度量: - \(h_{a v}=2.6 \sigma_{h}\):平均波高; - \(h_{1 / 3}=4 \sigma_{h}\):最大 \(1/3\) 波浪的平均波高; - \(h_{1 / 10}=5.2 \sigma_{h}\):最大 \(1/10\) 波浪的平均波高。
根据 Nathanson [8, p. 270] 的数据,可以推导出海面参数与局部风速之间的近似关系:
其中:
同样的公式也适用于蒲福风级 \(K_{B}\),只需用 \(K_{B}-1\) 替换 SS 即可。表 9.1 给出了海况 0 至 8 的结果。随着海况增大,坡度 \(\beta_{0}\) 的增加较为缓慢,这是由于波长与波高都会随风速增加,但增长因子并不相同。
表 9.1 海况 0 至 8 的海面参数
| 海况 SS | 风级 \(К_{B}\) | 风速 \(v_{w}(\mathrm{~m} / \mathrm{s})\) | 均方根高度偏差 \(\sigma_{h}(\mathrm{~m})\) | 坡度 \(\beta_{0}\) (rad) |
|---|---|---|---|---|
| 0 | 1 | 1.5 | 0.01 | 0.055 |
| 1 | 2 | 2.6 | 0.03 | 0.063 |
| 2 | 3 | 4.6 | 0.10 | 0.073 |
| 3 | 4 | 6.7 | 0.24 | 0.080 |
| 4 | 5 | 8.2 | 0.38 | 0.085 |
| 5 | 6 | 10.8 | 0.57 | 0.091 |
| 6 | 7 | 13.9 | 0.91 | 0.097 |
| 7 | 8 | 19.0 | 1.65 | 0.104 |
| 8 | 9 | 28.8 | 2.50 | 0.116 |
9.2.2 海杂波的反射率¶
当将常数 \(\gamma\) 模型应用于海杂波时,对所有极化和相对于风向的方向取平均,\(\gamma\) 的一阶模型依赖于海况或蒲福风级 \(K_{B}\) 以及雷达波长 [2, p. 110, Eq. (3.37)]:
该表达式表明,本征反射率因子 \(\gamma\)(因此对于特定掠射角的 \(\sigma^{0}\))随 \(\mathrm{SS}^{0.6}\) 和 \(\lambda^{-1}\) 变化。Blake [3, p. 311] 认为,当代观点是将 \(F_{c}{ }^{4}\) 包含在 \(\sigma^{0}\) 中,因此“习惯上将 \(\sigma^{0}\) 自身归因于频率依赖性,尽管实际上是干涉效应造成的。”正如我们在第 9.1.2 节中所述,将这两个项分离,并使用常数 \(\gamma\) 模型,有助于更好地理解表面杂波测量与建模中的物理因素。
基于公式 (9.37) 以及表 9.1 的数值,海杂波中 \(\sigma_{c} F_{c}^{4}\) 随掠射角的依赖关系的一阶模型,如图 9.5 所示,绘制了不同雷达波长和中等海况下的结果。可以识别出第 9.1.2 节中定义的三个区域:
- 天顶区:靠近垂直入射的窄区域,准镜面反射占主导;
- 近区(自由空间区):覆盖大多数小于 \(70^{\circ}\) 的掠射角,适用常数 \(\gamma\) 模型;
- 干涉区:干涉传播因子占主导。
在干涉区,海杂波的 \(\sigma^{0} F_{c}^{\prime 4}\) 值低至中间区和衍射区很少被关注,尽管第 9.1.2 节的传播因子模型仍然适用。然而,海面上的大气条件经常形成导波层,使得简单的衍射模型失效。
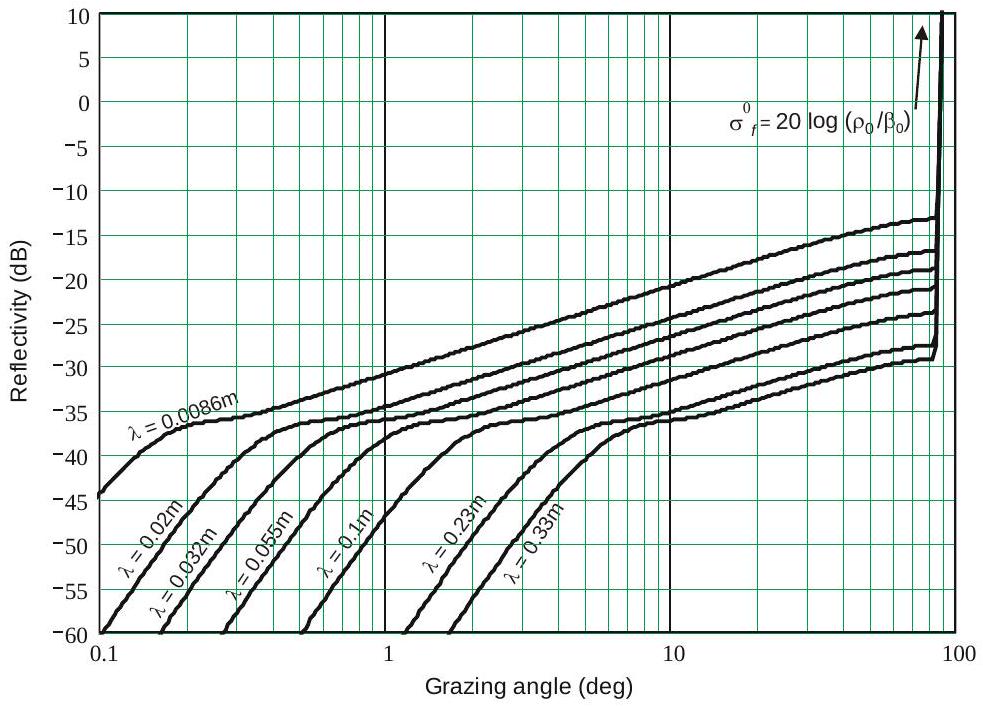
图 9.5 中等海况下的杂波反射率 \(\sigma^{0} F_{c}^{\prime 4}\)(海况 \(4, \sigma_{h}=0.38 \mathrm{~m}, \beta_{0}=0.085 \mathrm{rad}\))。
研究者们 [1, pp. 382-402] 已经探讨了 \(\sigma^{0}\) 随极化和风向的变化,并提出了考虑这些因素的详细模型。这些变化通常较小,常常被风级或海况的不确定性所掩盖,因此在大多数建模和分析中无需考虑。Long [1, p. 353] 就海杂波指出:
要获得雷达截面积随波长变化的有效描述是困难的,因为必须同时使用至少两部雷达进行测量,并同时测量海况……问题进一步复杂化在于 \(\sigma^{0}\) 的平均值可能出现快速时间变化。在单一波长的观测中,平均雷达截面积在 1 分钟内可变化多达 10 dB。因此,测量误差和不确定性往往掩盖了 \(\sigma^{0}\) 与 \(\lambda\) 在大多数入射角下存在的微弱函数关系。
在这些不确定性下,类似公式 (9.37) 的一阶模型似乎已足以满足大多数需求。对于有兴趣探讨二阶效应的研究者,推荐参考 Long 的著作以及近期一本专门研究海杂波统计与模型的书籍 [6]。
9.2.3 海杂波的功率谱¶
当表面风速为 \(v_{w}\) 时,海杂波在顺风方向具有一个平均速度,其大小依赖于极化。根据 [8, p. 292] 的数据,其近似表达式为:
这些关系式(如图 9.6 所示)适用于由毛细波产生的杂波。在较低雷达频段中,布拉格散射的平均速度不同,这已在超视距雷达观测中得到验证 [1, pp. 104-105]。
海杂波的频谱近似为高斯分布,其标准差为 [8, p. 286]:
Blake [3, p. 320, Eq. (7.40)] 提出了一个近似公式,表明 \(\sigma_{w}\) 与海况成正比。在 \(v_{w}>12 \mathrm{~m} / \mathrm{s}\)(即 \(\mathrm{SS}>5\))时,该近似给出的数值低于公式 (9.39),但线性关系与 Nathanson 数据(Blake 的数据来源)更加吻合。
图 9.6 水平极化与垂直极化下的海杂波平均速度与标准差。
当信号通过包络检波器时,公式 (9.39) 给出的标准差会增加 \(\sqrt{2}\) 倍。本征速度展宽 \(\sigma_{v c}\) 代入公式 (9.21),即可得到用于公式 (9.17) 的总展宽 \(\sigma_{\nu}\),适用于带扫描天线的运动雷达。
9.2.4 海杂波的幅度分布¶
针对海杂波的测量覆盖了 \(1^{\circ}\) 以下至 \(90^{\circ}\) 的掠射角。大部分数据采集于干涉区(即高于临界掠射角 \(\psi_{c}\),且低于 \(90^{\circ}-2 \beta_{0}\) 的镜面反射起始角),此时 \(\sigma^{0}\) 仅受 \(F_{c}^{4}\) 的轻微影响。测得的功率分布接近指数分布,直到掠射角进入干涉区,此时会出现对数正态分布、Weibull 分布或 K 分布的适度展宽形式。
高分辨率测量 [9] 表明,当单个波峰可能主导分辨单元时,结果更符合对数正态分布,其 \(\sigma_{\mathrm{dB}}\) 在 4 至 6.1 dB 之间。对应的平均值与中值 \(\sigma^{0}\) 之比分别为 1.8 dB 和 4.3 dB,这些值对应的 Weibull 展宽因子分别为 \(a=1.06\) 和 1.65。在极低掠射角和高分辨率雷达条件下,海杂波可能表现为“尖峰型”,此时适合用较大展宽因子的 Weibull 或对数正态分布进行描述。
9.3 陆杂波模型¶
与海杂波不同,陆地表面没有可用于描述其物理特性的标准“状态”。在高斯模型下,陆地可以通过其粗糙度(相对于平均表面的标准差 \(\sigma_{h}\))、坡度 \(\beta_{0}\),以及植被覆盖的类型和厚度来描述。虽然不存在与这些参数的某些组合对应的标准术语,但可使用表 9.2 中的术语来举例说明几类典型的表面类型。然而,高斯模型无法反映某些自然结构以及大多数从地表突起的人造结构的影响,这些将在第 9.4 节中单独作为离散杂波进行描述。
表 9.2 陆地表面参数
| 表面描述 | 内在反射率 \(\gamma(\mathrm{dB})\) | 均方根高度偏差 \(\sigma_{h}(\mathrm{~m})\) | 坡度 \(\beta_{0}\) (rad) |
|---|---|---|---|
| 山地 | -5 | 100 | 0.1 |
| 城市 | -5 | 10 | 0.1 |
| 林地丘陵 | -10 | 10 | 0.05 |
| 起伏丘陵 | -12 | 10 | 0.05 |
| 农田、沙漠 | -15 | 3 | 0.03 |
| 平原 | -20 | 1 | 0.02 |
| 光滑表面 | -25 | 0.3 | 0.01 |
测得的陆杂波数据与常数- \(\gamma\) 模型的一致性如图 9.7 所示。在近区掠射角条件下,实测数据与模型的差异在 1 dB 以内。
图 9.7 实测 X 波段陆杂波反射率 \(\sigma^{0}\)(实线),与常数 \(\gamma=-12 \mathrm{~dB}\) 模型(虚线)对比。实测数据改绘自 [10, p.103, 图 2.44],横坐标为对数刻度的掠射角。
9.3.1 陆杂波的反射率¶
相比海杂波,陆杂波的反射率更难以表征。常数- \(\gamma\) 模型适用于干涉区的掠射角,其对应的 \(\gamma\) 值列于表 9.2。反射率几乎与波长无关,波长的影响主要体现在中区和衍射区的传播因子上。在适用于地面雷达的低掠射角条件下,传播因素成为主导。一项研究 [11] 表明,几乎所有地形反射率的变化都可归因于传播因子,从而可以使用一个常数 \(\sigma^{0}\)(例如 -30 dB)来再现实测的均值和概率分布,至少在微波频段中如此。
一种一阶建模方法 [12] 假设表面均匀,每种地表类型对应一定的 \(\sigma_{h}\) 和 \(\gamma\)(见表 9.2),并假设雷达天线安装在高于局部平均地表 \(2 \sigma_{h}\) 的位置上。由此天线相对平均地表的高度为 \(h_{r}^{\prime}=h_{r}+2 \sigma_{h}\)。由此可得到一族 \(\sigma^{0}\) 曲线(见图 9.8),可根据不同波长下的传播因子进行修正。
图 9.8 陆杂波反射率与掠射角关系。此处传播因子的过渡距离 \(R_{1}\) 基于 \(\lambda=0.1 \mathrm{~m}, h_{r}=10 \mathrm{~m}\) 计算。
对陆杂波的研究与测量受到复杂地形影响。杂波传播路径下的地形特性可能与待预测或测量的分辨单元的地形不同。例如,丘陵地貌既可能通过跨越相似丘陵地形的路径观测,也可能通过跨越平坦地面的路径观测,二者特性差异很大。因此必须将传播因子与观测单元的内在反射率区分开来。在陆杂波的一项重要研究 [10] 中,测量并统计分析了这两个因素的乘积 \(\sigma^{0} F_{c}^{\prime 4}\),结果发现其与分辨单元处掠射角的相关性很弱,有时甚至为负。因此在该杂波模型中,掠射角被排除为影响因素。图 9.9 所示的简化波状地形模型直观地解释了缺乏相关性的原因。局部表面坡度在山顶与谷底为零(定义如此),在中间位置最大(虚线表示平均地表)。因此,\(\sigma^{0}\) 在面向雷达的坡面中部最大,在山顶与谷底附近接近零,而在背向雷达的坡面则为零。然而,坡度最大的区域会被前方山峰遮挡。

图 9.9 简单正弦波地形模型中的传播路径。
在图 9.8 中,路径 A 和 B 以较大掠射角到达地表,但会受到前方山峰的刀口衍射影响,其双程传播因子约为 \(F_{c}^{4} \approx -12 \mathrm{~dB}\)。这一损耗即使在地表“可见”的情况下也存在。路径 C 的掠射角与 \(\sigma^{0}\) 接近零,但其传播清晰度足以使 \(F_{c}^{\prime 4} \rightarrow 0 \mathrm{~dB}\)。衍射理论预测 \(F\) 在有足够传播清晰度与被遮挡区域之间应呈连续变化,而非从 1 突降为 0。因此,对于“可见地形”,掠射角与 \(\sigma^{0} F_{c}^{\prime 4}\) 之间不应有正相关。常数- \(\gamma\) 模型并不预言在中区存在正相关,反而提示在某些地形条件下可能呈负相关。
这只是地形传播因子给杂波建模带来复杂性的一个例子。若完全忽略传播理论,仅靠统计分析无法为陆杂波建模提供充分依据。而 [11] 的结果表明,分开建模 \(F_{c}^{\prime}\) 与 \(\sigma^{0}\) 是可行的,传播因素本身几乎解释了杂波回波功率的统计离散,因此图 9.4 所示的建模方法应当是有用的。
另一个对实测数据的误读认为,林木覆盖地形中的 \(\sigma^{0}\) 在掠射角趋近零时增大,归因于树干的镜面散射 [13]。然而数据中表现出的强增幅实则源自实验中远距离杂波路径下的地形轮廓。实验假设掠射角与观测距离成反比,这在平地(或近距离球面地球)条件下成立。但在实际测量中,远距离路径的地形由基本平坦逐渐过渡为上升地面,使局部掠射角在长距离处增加,从而导致反射率增强。实际上,是地形上升及相应传播因子的增加,而非树干散射,造成了反射率的增加。
在表 9.2 所示一阶模型的基础上,进一步的建模往往需要在特定雷达站的各方位扇区内考虑两个或更多表面区域,分别赋予不同的平均地表坡度(不是局部 \(\beta_{0}\),而是更大区域的平均值)、粗糙度和植被特性。这样可用于估算不同距离处分辨单元的 \(F_{c}^{\prime}\) 与 \(\sigma^{0}\)。若存在无法用高斯高度分布描述的地表特征,可在模型中加入离散杂波源。再进一步,可使用如 SEKE [14] 这类与站点和方位相关的传播模型(参见 [11] 的应用)。
9.3.2 陆杂波的功率谱¶
陆杂波的速度谱较窄,在有风条件下植被的谱被建模为高斯分布,且 \(\sigma_{v}<0.5 \mathrm{~m} / \mathrm{s}\)。然而,利用具有大动态范围的相干杂波测量系统所获得的高质量数据 [10, 第 6 章] 表明,实际谱呈指数型分布(图 9.10)。该图所绘各谱的总功率均已归一化为 1。在有风条件下,指数型谱的 \(94 \%\) 功率落在 \(\pm 0.5 \mathrm{~m} / \mathrm{s}\) 内,而高斯谱在 \(\sigma_{v}=0.20 \mathrm{~m} / \mathrm{s}\) 时相应比例为 \(95 \%\)。两者的谱均未显示出幂律形式 \(1 /\left[1+\left(f / f_{a}\right)^{n}\right]\) (\(n=2\) 或 3)所预测的宽展功率。已有的杂波数据 [16] 出现此类谱,可解释为测量接收机存在非线性(如对数特性)所致。
图 9.10 风吹树木在四种风况下的指数型谱(基于 [10, 表 6.1, p. 578] 的模型推导),并与 \(\sigma_{v}=0.2 \mathrm{~m} / \mathrm{s}\) 的高斯谱比较。
精确测量数据还显示出一个非波动(直流,DC)分量,其直流功率与交流功率之比 \(r\) 可表示为 [10, p. 580, 式 (6.4),已改写为米制单位]:
其中分子常数适用于以米/秒为单位的 \(v_{w}\)。由天线扫描(式 9.19)与平台运动(式 9.20,\(v_{s}=0\))引入的展宽分量,必须与图 9.10 的谱及 DC 分量通过卷积结合起来。除非内部运动分量占主导,否则结果近似为高斯分布,其中波动分量的标准差由式 (9.21) 给出,而直流分量的标准差由式 (9.22) 给出。前文已指出,[15] 中所报道的缓慢衰减谱,其速度超过散射体运动的物理极限,因此不应被采用。
9.3.3 陆杂波的幅度分布¶
实测的陆杂波幅度分布在天顶区与近区(平台区)呈瑞利分布(功率呈指数型),直到接近干涉区过渡时,才表现为威布尔或对数正态分布。由瑞利分布向更宽展分布的变化符合图 9.4 所示模型,最极端的展宽出现在中区和衍射区。
9.4 离散杂波¶
广展的威布尔与对数正态分布通常无法覆盖人为和某些自然地物产生的高峰值。飞行中的鸟类和地面车辆也是杂波的来源,这类情况需要与海杂波和陆杂波不同的单独建模方法。
9.4.1 离散地物特征¶
在几类离散杂波中,建筑物(包括塔楼和水塔)具有最大的雷达散射截面(RCS)。表 9.3 给出了文献 [16-19] 中不同的离散陆杂波模型,并推荐了一个通用模型。大型、刚性散射源可视为具有极小的空间范围(通常仅为一米或几米),其谱宽基本为零。这些散射源决定了大多数系统接收机输入端的动态范围,并对控制虚警的方法提出了特殊要求。
表 9.3 离散点杂波模型
| 参数 | Mitre | ||||
|---|---|---|---|---|---|
| RRE [16] | Ward [17] | Rural [18] | Metro [19] | 建议值 | |
| RCS 密度(每 \(\mathrm{km}^{3}\)): | |||||
| \(\sigma_{c} F_{c}^{\prime}=10^{2} \mathrm{~m}^{2}\) | 3.5 | 1.8 | 2 | ||
| \(\sigma_{c} F_{c}^{\prime}=10^{3} \mathrm{~m}^{2}\) | 0.8 | 0.36 | 0.02 | 2 | 0.5 |
| \(\sigma_{c} F_{c}^{\prime}=10^{4} \mathrm{~m}^{2}\) | 0.15 | 0.18 | 0.002 | 0.2 | 0.2 |
| 得到的平均 \(\sigma^{0}\) | -26 | -26 | -44 | -24 | -26 |
| 在 \(0 \sim 5 \mathrm{~km}\) 范围内 \(1^{\circ}\) 波束中的点数: | |||||
| \(\sigma_{c} F_{c}^{\prime}=10^{2} \mathrm{~m}^{2}\) | 0.7 | 0.35 | 0.4 | ||
| \(\sigma_{c} F_{c}^{\prime}=10^{3} \mathrm{~m}^{2}\) | 0.16 | 0.07 | 0.004 | 0.4 | 0.1 |
| \(\sigma_{c} F_{c}^{\prime}=10^{4} \mathrm{~m}^{2}\) | 0.03 | 0.035 | 0.004 | 0.04 | 0.04 |
9.4.2 鸟类与昆虫¶
Blake 并未讨论由鸟类引起的杂波,然而它对海军和其他类型雷达在探测与跟踪低空目标时构成了严重问题。在中微波频段,鸟类的 RCS 可建模为对数正态分布,其中值为 \(\sigma_{50}=-30 \mathrm{dBsm}\),标准差 \(\sigma_{y}=6 \mathrm{~dB}\)。这意味着仅有 \(0.13 \%\) 的鸟类 RCS 超过 -12 dBsm。然而,在距离雷达 50 km 的范围内可能存在 \(10^{5}\) 只鸟,其中约有 130 只超过 -12 dBsm。鸟类 RCS 随雷达波长及鸟类种类的变化在文献 [8, p. 184; 19] 中有所讨论。鸟类 RCS 对极化不敏感,较大的鸟类 RCS 值对波长也不敏感(至少在 \(\lambda<0.3 \mathrm{~m}\) 时)。小型鸟类在该波长附近呈现谐振,在更长波长下则进入瑞利散射区;大型鸟类在 UHF 波段发生谐振,而在 VHF 及更低频段均处于瑞利区。
在现代多普勒雷达系统中,鸟群最具破坏性的特征是其速度分布。鸟类飞行速度可高达 \(25 \mathrm{m} / \mathrm{s}\),[21,22] 的研究表明其速度近似服从高斯分布,均值为 \(15 \mathrm{m} / \mathrm{s}\),标准差为 \(5 \mathrm{~m} / \mathrm{s}\)。
迁徙鸟类的高度分布通常呈指数型,尺度高度约为 1 km,偶尔可延伸至 5 km 或更高,而大多数本地鸟类分布在较低高度。这意味着鸟类常常处于足够高的高度以提供自由空间传播条件,即 \(F_{c}^{\prime}=1\),甚至位于反射波瓣内,此时 \(F_{c}^{\prime} \rightarrow 2\)。一只平均 \(\sigma=-12 \mathrm{dBsm}\) 的鸟在雷达上可能表现为 \(\sigma F_{c}^{\prime 4}=0 \mathrm{dBsm}\)。再加上鸟群内的多只个体,这使得无法仅凭信号阈值来剔除鸟类杂波,除非目标信号远高于 0 dBsm。只有基于速度的滤波方法才可用于抑制鸟类杂波,这需要宽多普勒抑制陷波,或通过跟踪来确定绝对速度,以作为丢弃信息的依据。需要注意的是,对可检测到的鸟类的航迹文件不能被直接丢弃,否则整个探测与航迹起始过程在随后的检测中必须重新进行。
类似的情况也适用于昆虫 [20]。在微波频段,昆虫的对数正态分布中值可能为 \(-70 \mathrm{dBsm} \pm 10 \mathrm{~dB}\)。当标准差 \(\sigma_{y}=6 \mathrm{~dB}\) 时,其均值提高至 \(-70+5=-65 \mathrm{dBsm}\)。由数千只昆虫组成的群体,其均值可达 \(\approx-30 \mathrm{dBsm}\),并呈瑞利分布。传播因子平均可增加 +8 dB,这也使得昆虫进入现代系统的可检测范围。\({ }^{7}\)
\({ }^{7}\) 本书作者曾在 1947–1949 年间,于白沙试验场使用二战时期 SCR-584 火控雷达的 X 波段改型机,探测并自动跟踪个别昆虫,探测距离达数百米。该雷达峰值功率为 60 kW,脉宽 \(0.5 \mu \mathrm{~s}\),反射面直径 1.8 m。经近距离观测,这些昆虫被证实为蜻蜓。
9.4.3 陆地车辆¶
陆地车辆对许多空中监视雷达构成杂波问题,因为它们的 RCS 可与飞机相当,且其速度位于 MTI 和许多脉冲多普勒系统的通带内。在这种情况下,传播因子通常有利于所需的空中目标,因为空中目标必然位于陆地车辆之上,而陆地车辆通常位于衍射区。然而,当雷达视距内存在数十或数百辆陆地车辆时,除非通过速度滤波剔除速度低于约 \(40 \mathrm{~m} / \mathrm{s}\) 的目标,否则虚警不可避免。
9.4.4 风力涡轮机¶
自 Blake 的工作以来,风力涡轮机成为了新的雷达杂波源。这类涡轮机越来越多地成群出现,每个农场可能有数十台涡轮,单片叶片长度可达 40 m,安装在塔高可达 200 m 的支架上。塔本身构成强离散杂波源,其多普勒速度为零。叶片以 10–30 rpm 转动,尖端速度可达约 \(75 \mathrm{~m} / \mathrm{s}\),峰值 RCS 超过 +40 dBsm,因此可通过大多数多普勒处理器。目前,IEEExplore 数据库中已有约 40 篇论文讨论风力涡轮机对雷达的干扰。仅少数论文提供可用于建模和分析的数据。一些论文尝试预测涡轮机背后的扩展遮蔽区,目标回波功率可能被降低,但目标落入该区域的概率可忽略。涡轮机的主要影响是产生强离散杂波,并伴随叶片周期性镜面“闪光”产生的高速度分量。
其中一篇有用的论文 [23] 提供了 RCS 计算值的直方图,显示连续的类似 Rayleigh 分布,其峰值(及中位数)约为 +16 dBsm,并伴随低概率值延伸至 +44 dBsm,代表周期性叶片闪光。论文强调,风力涡轮机通常被观测的距离小于其定义 RCS 的远场距离,且地面反射会导致与多数计算模型假设的平面波有较大偏离。
9.5 模型:体积杂波¶
体积杂波主要有两种形式:降水和干扰箔条(chaff)。它们的建模方法相似,因为两者都占据空间体积,并由大量分布在体积内、密度缓慢变化的散射体组成。在雷达分辨单元内,散射体的密度通常可视为恒定,除非天线仰角波束下缘低于地平线,或上缘高于杂波体积的最大高度。结果是对雷达而言,体积杂波的电压幅度近似服从 Rayleigh 分布,其速度谱由散射体所处空气团的运动决定。
9.5.1 体积杂波的雷达散射截面与反射率¶
体积杂波的雷达散射截面由分辨单元内杂波体积 \(V_c\) 与散射粒子的体积反射率 \(\eta_v\) 的乘积给出,单位为 \(\mathrm{m^2/m^3}\):
当杂波在所有维度上都超出分辨单元时,其体积可表示为:
其中:
- \(R_c\):雷达到杂波体的距离(米)
- \(\theta_a, \theta_e\):方位和仰角半功率波束宽(弧度)
- \(L_p\):波束形状损耗
- \(\tau_n\):处理后脉冲宽度(秒)
- \(c\):光速(米/秒)
当仰角波束包含杂波下方的地面,或高于杂波上缘时,第二项需用仰角积分替代:
其中:
- \(f(\cdot)\):天线单向仰角电压波束
- \(\theta\):波束中的仰角
- \(\theta_b\):波束轴的仰角
- \(\theta_{\max}\):杂波在 \(R_c\) 的最大仰角
- \(\eta(R_c, \theta)\):\(R_c\) 距离及仰角 \(\theta\) 的体积反射率(\(\mathrm{m^2/m^3}\))
- \(\eta(R_c)\):\(R_c\) 距离处的体积反射率
- \(h\):海拔高度(米)
- \(h_{\max}\):杂波的最大高度
式 (9.43) 中对仰角的积分等效于 (3.46) 的积分,反映了杂波反射率在散射体范围之外为零。积分结果即为波束加权的杂波体积与散射反射率的乘积。通常假设杂波在方位方向上超出波束宽度,因此方位方向的积分可忽略。
9.5.2 体积杂波的波束-传播因子¶
天线方位波束的影响已经包含在 \(L_p\) 中,如果杂波充满仰角波束,则仰角波束影响也包含在内。对于未填充仰角波束的杂波,积分式 (9.43) 替代 \(L_p\) 来表示波束加权。相比于地表杂波,传播效应对体积杂波的重要性较低,但在仰角上出现干涉图案时,需要使用更复杂的积分:
其中,从 (8.5) 和 (8.10):
Blake [3, p. 300] 所给的体积杂波接收功率表达式在积分中包含了大气衰减系数,该衰减可能随降水变化而改变。但在本书的推导中,为了突出杂波回波的来源,计算 \(\sigma F_c^4\) 时不考虑衰减。对于多径或模糊距离的杂波回波,应使用 (3.5) 并考虑每个模糊距离的衰减。
体积杂波的传播因子 \(F_c'\) 可定义为 (9.44) 积分与 (9.43) 积分比值的四次根。在强反射条件下(\(\rho \approx 1\)),有 \({F_c'}^4 \approx 6\)(或 +8 dB),这一增益足够大,需要在雷达方程中考虑。
9.5.3 体积杂波的谱特性¶
体积杂波的谱特性对雷达方程的影响与地表杂波类似:改进因子 \(I_m\) 取决于杂波谱的位置和形状,而杂波可探测性因子取决于处理器积分的杂波样本之间的相关性。Nathanson [8, p. 240, Eq. (6.10)] 将体积杂波速度谱的标准差表示为四个分量的平方和,这里增加由天线扫描引起的分量 $$
其中: - \(\sigma_{v c}\):气团内湍流引起的固有扩展; - \(\sigma_{v a}\):雷达波束扫描引起的扩展; - \(\sigma_{v s}\):仰角波束中风切变引起的扩展; - \(\sigma_{v b}\):方位波束径向速度变化引起的扩展; - \(\sigma_{v f}\):粒子下落速度投影引起的扩展。
湍流分量通常取 \(\sigma_{v c} \approx 1~\mathrm{m/s}\),但极值可能在 \(0.5 < \sigma_{v c} < 2~\mathrm{m/s}\) 之间。天线扫描分量由 (9.19) 给出,方位波束展宽分量由 (9.20) 给出。风切变分量在杂波充满仰角波束时为:
其中: [ k_{sh} = \text{沿波束方向的风切变常数,单位 m/s per km}, \quad R_c = \text{距离 (km)}, \quad \theta_e = \text{仰角波束宽 (rad)}. ]
当杂波仅占仰角波束的一部分时,风切变分量可以通过对速度随高度变化的剖面积分,并按模式传播因子四次方加权,得到特定距离下的速度谱:
输入谱的总功率:
谱的均值:
方差:
方位波束展宽分量 \(\sigma_{v b}\) 类似于 (9.20) 中的 \(\sigma_{v\theta}\),应用于方位方向。粒子下落速度变化估算为:
雨时 \(\theta\) 为仰角,雪时常数远小于 \(1~\mathrm{m/s}\)。 体积杂波的平均速度为风速在波束轴上的投影:
其中: - \(v_w\):风速; - \(A_w\):风向方位角; - \(A_b\):波束轴方位; - \(\theta\):仰角 (rad)。
若风向与波束轴对齐,平均速度为远离雷达的分量(负号)。叠加水滴下落速度投影:
重雨时 \(v_f\) 可达 \(9~\mathrm{m/s}\)。当遇到旁瓣或背瓣杂波时,其谱在 \([-v_0, v_0]\) 之间,幅度由相应波瓣包络确定。
9.5.4 体积杂波的幅度分布¶
在大多数情况下,雷达分辨单元内贡献体积杂波的散射体数量极多,因此幅度服从 Rayleigh 分布。一份报告 [24] 显示雨杂波的测量值遵循 Weibull 分布,扩展因子可高达 \(a_w = 1.6\)。这种分布可能适用于穿过云团不同区域(从边缘到中心)的距离区间,其中平均反射率变化显著。然而,只要这些梯度不是非常陡峭,典型 CFAR 窗口内的统计特性仍接近 Rayleigh 分布,且基于距离单元平均的 CFAR 不会产生过多虚警。
9.5.5 降水杂波模型¶
降水杂波的模型定义完善,这可能归因于气象雷达在降水率测量中的广泛应用 [25]。对于直径 \(D \le \lambda/16\) 的球形水滴,满足 Rayleigh 小球近似,其雷达截面为 [25, p.35, Eq.(3.6)]:
其中: - \(D\):水滴直径 (m); - \(\lambda\):波长 (m); - \(K_w = \frac{m^2 - 1}{m^2 + 2}\),\(m = n - j n \kappa\) 为水的复折射率。
微波和毫米波段水的 \(|K_w|^2\) 取值 0.91–0.93;冰的对应值为 \(|K_i|^2 = 0.18\)。
雷达气象学定义降水反射率因子 \(Z\) 为体积内 \(D^6\) 的加权平均:
其中: - \(\Delta V\):体积元素 (m³); - \(D_i\):水滴直径 (m); - \(n(D)\):体积内直径为 \(D\) 的水滴数。
体积反射率为:
若不满足 Rayleigh 条件,可用等效反射率 \(Z_e\) 代替 \(Z\)。\(Z\) 通常以 \(\mathrm{dB}(Z) = 10 \log Z~(\mathrm{mm^6/m^3})\) 表示。
Marshall-Palmer 分布给出了 \(Z\) 与降水率 \(r_r\) (mm/h) 的关系:
结合 \(|K_w|^2 = 0.93\):
对雪(含水量速率 \(r_s\) mm/h):
图 9.11 显示了不同波长下雨和雪的 (9.60) 与 (9.61) 的绘图。\({ }^{9}\) 毫米波段的雨量数值已根据不满足雷利近似的雨滴尺寸进行了调整。
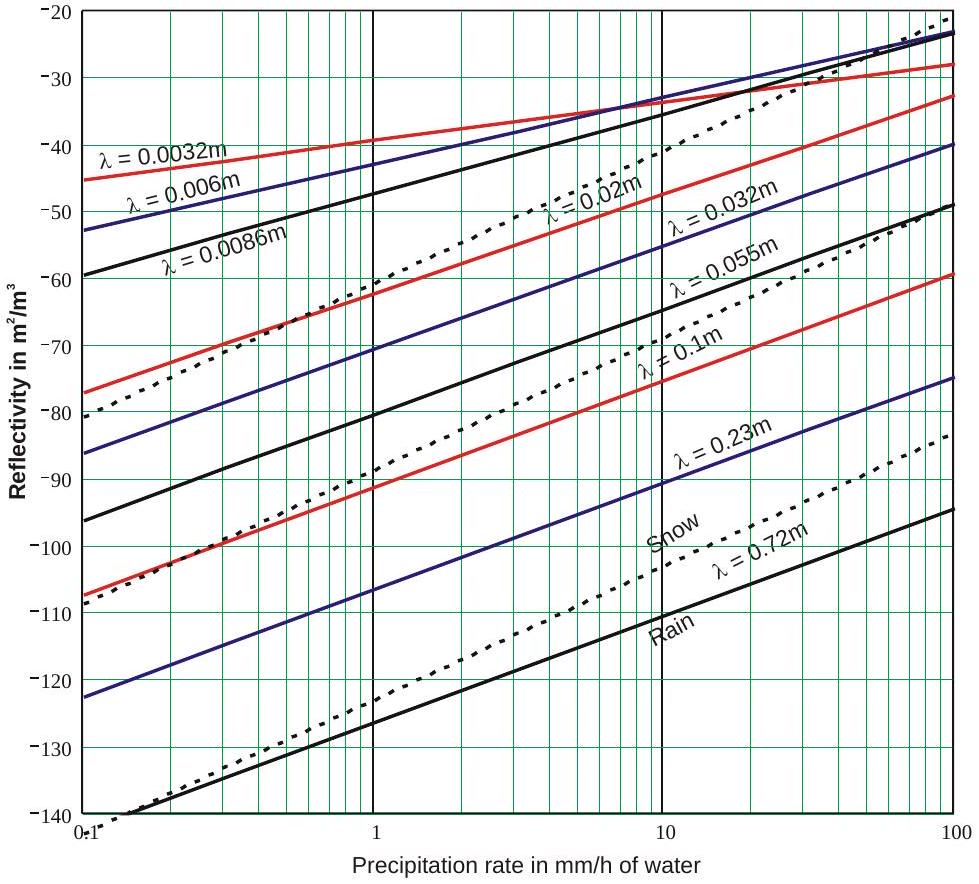
图 9.11 显示不同波长下雨和雪的体积反射率变化。毫米波段的雨滴取值已针对不满足 Rayleigh 条件的水滴进行调整。
\({ }^{9}\) (9.60) 和 (9.61) 中的常数和指数需要针对毫米波波段进行修改。调整后的数值是作为波长的函数,在随 DVD 提供的 Mathcad 工作表中计算得出,该工作表用于绘制图 9.11。没有 Mathcad 软件的读者可通过该工作表的 PDF 文件查看计算过程。
体积降水杂波幅度服从 Rayleigh 分布,速度谱如 9.5.3 节所述。重要特性是圆极化 (CP) 发射的杂波回波具有相反的 CP,这使得在 (3.4) 式及后续杂波能量计算中,通过接收天线设计响应同向 CP,可降低 \(F_{pc}\) 通常 20–25 dB。在此情况下,目标能量损失为 2–4 dB,可提升信噪比约 20 dB。双极化接收系统可切换 CP,避免未被显著降水覆盖区域的目标回波损失。
9.5.6 阵雨条 (Chaff) 模型¶
单根阵雨条沿垂直方向观察时的雷达截面为 \(0.86 \lambda^2\),所有方位角平均值降至 \(0.15 \lambda^2\)。早期铝制阵雨条数据给出了总 RCS 与重量 \(W\)(kg)、频率 \(f_0\)(GHz)和波长 \(\lambda\)(m)的关系:
对于切割成在 \(\lambda\) 处共振的箔条偶极子。最新的数据 [26, p. 420] 显示,现代铝化玻璃箔条在两倍频带宽内的雷达散射截面积(RCS)可达到公式 (9.62) 所给值的两倍以上,其中 \(\lambda\) 取几何平均值。该带宽内的反射率如图 9.12 所示。当 \(\lambda>0.3~\mathrm{m}\) 时,共振偶极子可能被称为“绳索”的长条替代,其单位重量 RCS 较低,但不易断裂。箔条下降缓慢,其运动倾向于随机化单个偶极子的方向,因此对雷达极化不太敏感,尽管在水平极化下响应更强,尤其是在部署后较长时间。
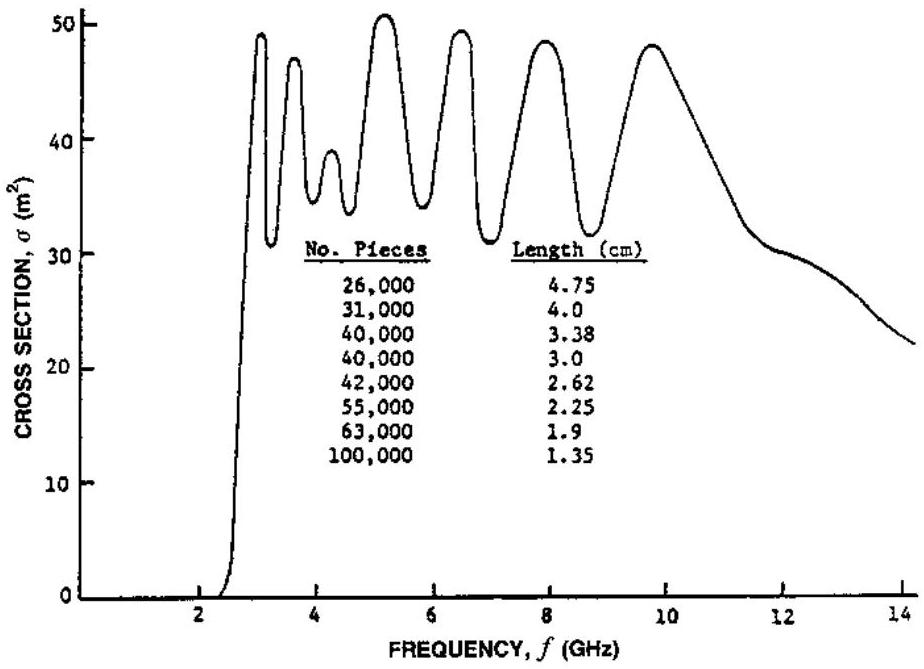
图 9.12 一组箔条的雷达散射截面积。(来源:[26]。© 1999, Artech House,经许可转载。)
箔条的幅度分布服从瑞利分布,其频谱特性如第 9.5.3 节所述。箔条与降水杂波的显著区别在于,箔条回波无法通过使用圆极化(CP)抵消,而且箔条可能出现在更高的高度。后者可以被攻击方利用,在雷达波形的非歧义距离之外产生杂波,此时风切变会将平均速度与近程杂波区分开 [2, p. 121]。由此产生的宽杂波谱要求使用比单距离歧义杂波更宽的多普勒抑制缺口。
9.6 杂波改善因子 (Clutter Improvement Factor)¶
通过基于杂波低多普勒位移进行滤波,可以减小杂波干扰。任意定义的多普勒滤波器电压响应(归一化为白噪声功率增益为 1)可表示为速度函数:
其中平均滤波增益为\(\bar{G}=\int_{-\infty}^{\infty} H^{2}(v) d v\)。
杂波谱 W(v) 的输入能量 C 如公式 (9.50) 所示,输出能量为:
杂波改善因子定义为:
这些公式可应用于 MTI 和脉冲多普勒信号处理器。在特殊情况下,可对改善因子得到闭式表达式。通常,这些特例中的杂波谱为高斯分布,特征参数为标准差 \(\sigma_\nu\) 和平均速度 \(v_0\)。
9.6.1 相干 MTI 改善因子 (Coherent MTI Improvement Factors)¶
相干 MTI 系统指发送机在消除器使用的脉冲数范围内保持相干,或接收端的 COHO (coherent-on-receive) 与发送脉冲锁相的系统。使用二进制权值的 \(m\) 延迟消除器的速度响应为:
其中基本盲速为:
消除器施加在 \(m+1\) 个脉冲上的电压权值为:
平均功率增益为:
归一化响应为:
对于高斯谱,相干 MTI 系统使用二进制权值时的性能可用杂波谱的标准差 \(\sigma_v\)、平均速度 \(v_0\)、级联消除器数 \(m\) 以及调零速度 \(v_{0 f}\) 表示。为消除对雷达波长 \(\lambda\) 和脉冲重复频率 \(f_r\) 的依赖,可将谱参数归一化为雷达波形的基本盲速 \(v_b\):
扫描引起的归一化杂波扩展为(见 9.19):
其中 \(n = \theta_3 / \omega_s\) 是扫描波束宽度内的脉冲数。
Raemer 给出的一、二、三脉冲消除器的 MTI 改善因子,可用归一化参数表示为:
\(v_{z f}\) 为归一化空速,除非对平均杂波速度进行自适应,否则为零。
Blake 考虑了由杂波扩展引起的整体改善因子,同时考虑内部电路不稳定性、发射机不稳定性等限制:
该表达式适用于单脉冲消除器,或当其他不稳定性随机独立于脉冲时。如果这些项相关,增加的 \(\sigma_z\) 或式 (9.75) 中的 \(1/\sigma_z^4\)、(9.76) 中的 \(1/\sigma_z^6\) 会导致改善因子降低幅度大于随机不稳定性的影响。
9.6.2 非相干 MTI 改善因子 (Noncoherent MTI Improvement Factors)¶
非相干 MTI 使用杂波样本自身建立参考相位,以检测目标和杂波。性能通常低于相干 MTI,但优点是能够在 \(v_0\) 处维持零点:
9.6.3 其他 MTI 注意事项 (Other MTI Considerations)¶
在应用第 9.6.1 和 9.6.2 节的改善因子表达式时,需要考虑以下问题,它们超出了杂波谱和处理器速度响应模型的范畴:
- MTI 损耗:MTI 处理的改善因子会被多种 MTI 损耗项稀释(见第 10.2.5 节)。这些损耗影响整个 MTI 处理的距离段,即使目标在无杂波区域也可能影响探测范围,除非处理仅应用于有杂波区域。
- CFAR 损耗:未被消除的杂波可能需要使用恒虚警率 (CFAR) 检测,引入额外的损耗项(第 10.2.5 节)。
- 多次回波杂波 (Multiple-time-around clutter):第 9.6.1 节的表达式假定在消除器使用的所有脉冲中保持杂波相干。如果存在多次回波杂波(来自波形的非模糊范围 \(R_u = c / 2 f_r\) 之外的源),则在每次波形变化(如 PRF、射频或脉冲相位调制)或波束位置变化后,必须发送填充脉冲,使每个消除器脉冲中出现相同杂波。阶梯 PRF 或脉冲间频率捷变与 MTI 在存在多次回波杂波时不兼容;此外,Coherent-on-receive 技术在这种情况下无法使用。
- 阶梯 PRF:使用阶梯 PRF 会限制改善因子 [28, p. 2.44]。
- 非线性:MTI 消除器前的任何非线性会改变接收机输入的高斯谱,显著降低可实现的改善因子 [28, 29]。
9.6.4 脉冲多普勒处理 (Pulsed Doppler Processing)¶
在脉冲多普勒雷达中,在一个相干处理间隔 (CPI) 内发射 \(n_c\) 个脉冲。处理器将 \(n_p = n_c - n_f\) 个脉冲的回波(去掉前 \(n_f\) 个填充脉冲,\(n_f\) 为 \(n_c\) 的某个分数)组合形成 \(n_p\) 个滤波器。滤波器增益可以固定,也可以通过 CFAR 调整,以排除杂波频谱上的输出或将其降低到噪声水平。通常用杂波衰减 (Clutter Attenuation, CA) 描述脉冲多普勒滤波器性能。
一般而言,PD 处理器的速度响应可描述为:
- 位于或接近 \(v=0\) 的拒斥凹口,电压响应 \(H_0 \ll 1\),宽度 \(\Delta_v\) m/s;
- 凹口两侧的过渡区域宽度 \(\Delta_v\),在 \(v = \pm 0.5 \Delta_v\) 时 \(H=H_0\),在 \(v=\pm(0.5 \Delta_v + v_b/n_p)\) 时 \(H=0.5\),在 \(v=\pm(0.5 \Delta_v + 2 v_b/n_p)\) 时 \(H=1\);
- 全响应区域,响应保持为 \(1\),直至 \(v = \pm 0.5 v_b\);
- 接收机带宽内响应重复,间隔 \(v_b\);
- 可自适应将杂波谱中心移至凹口中心。
杂波衰减定义为:
其中 \(C_o\) 为滤波器输出功率(滤波器在目标频率上 \(H(v)=1\)):
图 9.13 给出了理想化响应 \(H(v)\),用于 \(\sigma_v = 1~\mathrm{m/s}\) 的杂波扩展。16 脉冲和 8 脉冲的凹口分别得到 \(CA = 40~\mathrm{dB}\),盲速 \(v_b = 60~\mathrm{m/s}\),凹口宽度分别为 \(\Delta_v = 3.1\) 和 \(1.1~\mathrm{m/s}\)。更多脉冲可以获得更陡的响应并减少过渡区宽度,从而改善目标响应覆盖盲速的比例。

图 9.13 杂波谱(虚实线)与多普勒滤波器响应 \(H(v)\),杂波扩展 \(\sigma_{v}=1 \mathrm{~m/s}\),盲速 \(v_{b}=60 \mathrm{~m/s}\),杂波衰减 CA=40 dB,对于 \(n_{p}=16\) 脉冲(实线)和 8 脉冲(虚线)。
在实际中,理想化的响应通常通过一组多普勒滤波器近似实现,如图 9.14 所示,其中包含显著杂波的若干滤波器被降敏(例如通过距离单元平均 CFAR),以形成深陷口。输入信号的加权使滤波器旁瓣低于抑制口的水平。敏感滤波器的响应包络形成目标检测区域,其中滤波器间的凹陷会引入小的滤波器跨越损失(见第 10.2.5 节)。盲口两侧过渡区的宽度约等于滤波器间隔 \(v_{b} / n_{p}\),而单个滤波器的 \(-6~\mathrm{dB}\) 宽度是该间隔的两倍。
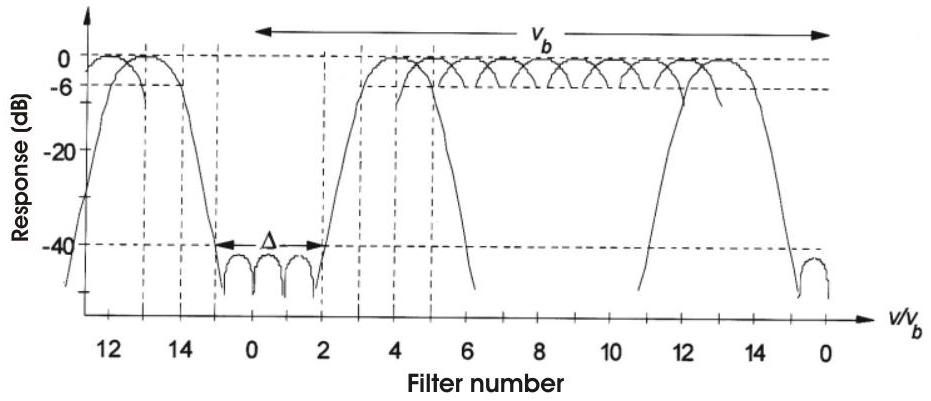
图 9.14 由 16 点傅里叶变换滤波器组形成的多普勒响应。
脉冲多普勒杂波衰减的常规定义(公式 9.81 和 9.82)与 MTI 的定义不同,后者中改进因子使用归一化响应 \(H^{\prime}(v)=H(v) / \sqrt{\bar{G}}\)(见公式 9.63)来定义。在大多数情况下,这种差异较小。例如,图 9.12 的响应对于 16 脉冲 \(\bar{G}=0.82=0.84~\mathrm{dB}\),对于 8 脉冲 \(\bar{G}=0.73=-1.4~\mathrm{dB}\)。脉冲多普勒性能的更有用度量是归一化杂波衰减 \(\mathrm{CA}^{\prime}\),等于公式 (9.65) 所给的改进因子 \(I_{m}\),即 \(\mathrm{CA}^{\prime}=\sqrt{\bar{G}} \mathrm{CA}\)。在所示情况下 \(0.8-1.4~\mathrm{dB}\) 的差异可以忽略,但在 \(\bar{G}\) 明显小于 1 的情况下应注意定义差异。
每个盲速区间内具有可接受目标响应(高于 -6 dB)的速度分数为:
脉冲多普勒滤波器组中可获得的杂波衰减与盲速与允许低于 -6 dB 的速度响应分数的比值直接相关。图 9.15 显示了这种关系,对于杂波扩展 \(\sigma_{v}=1~\mathrm{m/s}\),给出了两种盲速和 16 脉冲及 8 脉冲的情况。对于盲速与杂波扩展比相同的其他情况,这些曲线也可适用。

图 9.15 可获得的杂波衰减与速度响应低于 -6 dB 的分数关系。
从图 9.15 可以看出,对于 \(\mathrm{CA}=40~\mathrm{dB}\),当 \(60<v_{b}/\sigma_{v}<100\) 时,16 脉冲会导致 \(14\%\) 到 \(18\%\) 的潜在目标速度损失,而 8 脉冲则导致 \(24\%\) 到 \(27\%\) 的速度损失。如果需要更大的杂波衰减,这些分数将增加;如果盲速与杂波扩展比或脉冲数增加,这些分数将减小。通过对每组脉冲使用 PRF 多样性,并在波束驻留时间足够的情况下交换两组或更多脉冲,这些损失可以减小,甚至可能消除(零速度区除外)[2, pp. 243-245]。
脉冲多普勒处理器性能的其他限制类似于第 9.6.3 节中描述的 MTI 限制。
9.6.5 杂波图 (Clutter Maps)¶
现代数字处理的一项重要贡献是杂波图(clutter map),它存储雷达覆盖区域内每个小区域(理想情况下为每个雷达分辨单元)的输入回波水平信息,并对多个天线扫描进行平均。杂波图最初由林肯实验室(Lincoln Laboratory)的工程师[30]作为所谓的运动目标探测器(MTD)的一部分提出,并被纳入许多现代信号处理器中。杂波图的一个功能是控制接收机增益,以保持含有强杂波的单元的线性,使回波维持在多普勒处理能够将输出抑制到系统平均噪声水平的水平。这避免了在基于距离单元平均的 CFAR 检测电路中,因同时依赖杂波的平均值和方差进行门限控制而产生的损失(参见第 10.2.5 和 10.2.6 节)。
杂波图的第二个功能是根据杂波背景的变化(尤其是陆地杂波)选择处理模式,以最大化目标检测概率。在仅包含热噪声的单元中,信号可以绕过多普勒处理,从而检测径向速度接近零或处于其他盲速的目标。由于沿雷达切线方向移动的目标从一个分辨单元进入下一个单元而不会显著影响存储在图中的平均值,因此它们不会被处理器抑制。杂波图取代了以前手动选择应用多普勒处理区域的做法(例如,MTI 的扇区门控或普通视频处理)。
通过泛化映射过程,有可能使处理路径适应不同类型的杂波和其他干扰。利用干扰环境的近期历史,可以改善自适应处理的性能,否则这些处理将被迫依赖对随时间和空间坐标变化的干扰的即时响应。
9.7 杂波与信号处理总结 (SUMMARY OF CLUTTER AND SIGNAL PROCESSING)¶
杂波可以来源于:
- 表面:\(\sigma_c = A_c \sigma^0\)
- 体积:\(\sigma_c = V_c \eta_v\)
- 离散目标:具有指定 RCS \(\sigma_c\)
其中 \(\sigma^0\) 和 \(\eta_\nu\) 为杂波反射率。接收功率与 RCS 与杂波图形传播因子 \(F_c^4\) 的乘积成正比。\(F_c\) 由天线电压模式与杂波传播因子 \(F_c'\) 相互作用产生,\(F_c'\) 可根据路径几何和雷达波长单独表达。
表面杂波主要分为五个区域,其区别在于图形传播因子 \(F_c'\) 的性质:
- 近区:\(F_c' \approx 1\),由天线仰角模式决定;
- 干涉区:\(F_c'\) 由直接波与反射波的矢量叠加决定;
- 中间区:\(F_c'\) 受干涉与衍射影响;
- 衍射区:\(F_c' = F_d\),对应平滑球面或刀锋衍射;
- 天顶区:空中雷达波束遇到表面倾斜面的镜面反射,定义 \(\sigma_f^0\),\(F_c' \approx 1\),天线模式用于计算照射区域内 \(\sigma_f^0\) 的平均值。
地表杂波的测量结果通常报告为表示 \(\sigma^{0}\),但实际上是 \(\sigma^{0} F_{c}^{4}\),因此在将数据用于估算雷达性能时,需要评估并调整适用于测量系统的模式-传播因子。本章介绍了海面、陆地和离散杂波的一阶模型,同时考虑了报告数据中的传播效应。降水杂波模型由于雷达气象学的广泛研究,定义较为明确。干扰箔(chaff)模型取自电子战文献。
对于不同类型的杂波,根据需要对其功率谱和振幅分布进行建模,以确定它们对信号处理改进因子以及第 10 章中讨论的目标检测损失的影响。
通过使用多普勒处理,可以获得数十分贝的杂波改进因子,同时也会在基本盲速的倍数处引入盲速。支持多普勒处理需要多脉冲停留时间。
References¶
- Long, M. W., Radar Reflectivity of Land and Sea, 3rd ed., Norwood, MA: Artech House, 2001.
- Barton, D. K., Radar System Analysis and Modeling, Norwood, MA: Artech House, 2005.
- Blake, L. V., Radar Range-Performance Analysis, Lexington, MA: D. C. Heath, 1980; Dedham, MA: Artech House, 1986.
- Goldstein, H., "The Fluctuations of Clutter Echoes," in Propagation of Short Radio Waves, Vol. 13, MIT Radiation Laboratory Series, New York: McGraw-Hill, 1951; Reprinted (CD ROM Edition), Norwood, MA: Artech House, 1999, pp. 550-587.
- Barlow, E. J., "Doppler Radar," Proc. IRE, Vol. 37, No. 4, April 1949, pp. 340-355; Reprinted in Radars, Vol. 7, CW and Doppler Radar, D. K. Barton, ed., Dedham, MA: Artech House, 1978.
- Ward, K. D., R. J. Tough, and Simon Watts, Sea Clutter: Scattering, the K-Distribution and Radar Performance, London: The Institution of Engineering and Technology, 2006.
- Schleher, D. C., MTI and Pulsed Doppler Radar, 2nd ed., Norwood, MA: Artech House, 2010.
- Nathanson, F. E., with J. P. Reilly and M. N. Cohen, Radar Design Principles—Signal Processing and the Environment, 2nd ed., New York: McGraw-Hill, 1991.
- Trunk, G. V., "Radar Properties of Non-Rayleigh Sea Clutter," IEEE Trans. on Aerospace and Electronic Systems, Vol. AES-8, No. 2, March 1972, pp. 196-204; Reprinted in Radars, Vol. 5, Radar Clutter, D. K. Barton, ed., Dedham, MA: Artech House, 1975.
- Billingsley, J. B., Low-Angle Radar Land Clutter—Measurements and Empirical Models, Norwich, NY: Wm. Andrew Publishing, 2002.
- Ayasli, S., "Propagation Effects on Radar Ground Clutter," IEEE Radar Conf., Los Angeles, CA, March 12-13, 1986, pp. 127-132.
- Barton, D. K., "Land Clutter Models for Radar Design and Analysis," Proc. IEEE, Vol. 73, No. 2, February 1983, pp. 198-204.
- Krason, H., and G. Randig, "Terrain Backscattering Characteristics at Low Grazing Angles for X- and S-band," Proc. IEEE, Vol. 54, No. 12, December 1966, pp. 1964-1965; Reprinted in Radars, Vol. 5, Radar Clutter, D. K. Barton, ed., Artech House, 1975, pp. 287-288.
- Ayasli, S., "SEKE: A Computer Model for Low Altitude Radar Propagation Over Irregular Terrain," IEEE Trans. AP, Vol. 34, No. 8, August 1986, pp. 1013-1023.
- Fishbein, W., S. W. Gravelein, and O. E. Rittenbach, "Clutter Attenuation Analysis," Technical Report ECOM-2808, U.S. Army Electronics Command, Ft. Monmouth, NJ, March 1967; Reprinted in MTI Radar, D. C. Schleher, ed., Dedham, MA: Artech House, 1978, pp. 331-354.
- Edgar, A. K., Dodsworth, E. J., and Warden, M. P., "The Design of a Modern Surveillance Radar," IEE Conf. Pub. No. 105, Radar-73, October 1973, pp. 8-13; Reprinted in Radars, Vol. 5, Radar Clutter, D. K. Barton, ed., Artech House, 1975, pp. 51-56.
- Ward, H. R., "A Model Environment for Search Radar Evaluation," IEEE Eascon Record, 1971, pp. 164-171; Reprinted in Radars, Vol. 5, Radar Clutter, D. K. Barton, ed., Artech House, 1975, pp. 43-50.
- McEvoy, W. J., Clutter Measurements Program: Operations in Western Massachusetts, Mitre Corp. Rep. MTR-2074, March 1972, DDC Doc. AD742297.
- McEvoy, W. J., Clutter Measurements Program: Operations in the Metropolitan Boston Area, Mitre Corp. Rep. MTR-2085, March 1972, DDC Doc. AD742298.
- Vaughn, C. R., "Birds and Insects as Radar Targets—A Review," Proc. IEEE, Vol. 73, No. 2, February 1985, pp. 205-227.
- Moon, J. R., "A Survey of Bird Flight Data Relevant to Radar Tracking Systems," IEE Radar-2002, Edinburgh, October 15-17, 2002, pp. 80-84.
- Moon, J. R., "Effects of Birds on Radar Tracking Systems," IEE Radar-2002, Edinburgh, October 15-17, 2002, pp. 300-304.
- Greving, G., and R. Mundt, "The Radar Cross Section and Wind Turbines—Definition and Effects of the Ground and Finite Distances," Proc. 2011 International Radar Symposium, September 7-9, 2011, pp. 803-808; Microwaves, Radar and Remote Sensing Symposium 2011, August 25-27, 2011, pp. 321-326.
- Sekine, M., et al., "On Weibull Distributed Weather Clutter," IEEE Trans. on Aerospace and Electronic Systems, Vol. AES-15, No. 6, November 1979, pp. 824-830.
- Doviak, R. J., and D. S. Zrnić, Doppler Radar and Weather Observations, New York: Academic Press, 1993.
- Schleher, D. C., Electronic Warfare in the Information Age, Norwood, MA: Artech House, 1999.
- Raemer, H. R., Radar Systems Principles, Boca Raton, FL: CRC Press, 1997.
- Shrader, W. W., and V. Gregers-Hansen, "MTI Radar," in Radar Handbook, 3rd ed., M. I. Skolnik, ed., New York: McGraw-Hill, 2008, Chapter 2.
- Ward, H. R., "The Effect of Bandpass Limiting on Noise with a Gaussian Spectrum," Proc. IEEE, Vol. 57, No. 11, November 1969, pp. 2089-2090.
- Cartledge, L., and R. M. O'Donnell, Description and Performance Evaluation of the Moving Target Detector, MIT Lincoln Laboratory Project Report ATC-69, March 8, 1997.