第10章 雷达方程中的损耗因子¶
即使在热噪声的良性环境中,雷达方程通常也会产生对雷达探测距离的不准确估计。Blake 的公式是一个很好的起点,他对接收机噪声、大气影响和传播因素的严格处理,减少了方程中这些项的误差机会。然而,其他方面仍然是距离估计中持续误差的来源:这些损耗因子要么在方程中单独列出,要么隐含在可探测性因子和其他雷达参数中。本章讨论了如果要准确估计探测距离,必须评估的多种损耗因子。
“损耗”一词可以有多种定义,但在这里它不仅指能量在电阻性电路元件中的耗散,还指雷达系统或外部环境中任何阻碍信号被接收并充分利用的因素。系统损耗 \(L\) 已包含在公式 (1.16)、(1.18) 和 (1.19) 中,但没有详细定义。大多数雷达教材都会提及一个或多个损耗因素,但留给读者自行识别和评估。没有标准程序能够确保充分考虑所有损耗,尽管文献 [1] 专门用一章讨论了损耗预算。
损耗以不同方式影响雷达。有些降低了雷达接收的信号能量,有些减少了传递到探测装置的能量分数,还有些降低了对目标回波的响应,从而增加了为获得所需探测性能所需的接收能量。一些损耗被明确指出(例如 Blake 图表(图1.1)中的传输线损耗 \(L_{t}\)),而其他损耗则可以作为指定项的组成部分识别(例如杂项损耗 \(L_{x}\) 的组成部分,它增加了雷达方程中的有效可探测性因子 \(D_{x}\)),或作为其他项与预期值的偏差(例如天线损耗)。
某些损耗因子用符号 \(L\) 表示,会增加方程的分母,而其他则以电压增益因子 \(F<1\) 的形式出现在分子中。当条件可能导致 \(F=0\) 时,后一种形式更为优选。在以下讨论中,损耗因子的符号使用下标来标识其来源,并用附加下标 \(t\) 表示发射路径,\(r\) 表示接收路径,\(c\) 表示应用于接收杂波能量,\(j\) 表示接收干扰信号能量。
10.1 接收信号能量的减少¶
在公式 (1.7)-(1.14) 中用于描述接收射频能量减少的损耗 \(L_{1}\) 组成部分在本节中进行了说明。
10.1.1 雷达方程中指定的项¶
10.1.1.1 传输线损耗 \(L_{t}\)¶
损耗 \(L_{t}\) 在 Blake 图表(图1.1、1.2)以及公式 (1.20)、(1.22)、(1.23) 和 (1.26) 中被明确列出。它定义为发射机输出功率(峰值或平均值)与送至定义 \(G_{t}\) 的天线端口的功率之比。它包括表10.1中列出的耗散损耗以及任何阻抗失配导致的功率反射回发射机的影响。
表10.1 传输线损耗组成
| 组成部分 | 典型损耗 (dB) | 备注 |
|---|---|---|
| 波导或同轴线 | 0.2 | 见图10.1 |
| 旋转接头 | 0.1 | 可能有两到三个接头 |
| 双工器 | 0.5 | 铁氧体或气体器件 |
| 谐波滤波器 | 0.2 | 用于磁控管或CFA |
| 定向耦合器 | 0.05 | |
| 开关 | 0.05 | 与虚拟负载一起使用 |
| 失配 | 0.1 | 典型值,VSWR = 1.4 |
同轴线和波导的损耗系数见图10.1。在使用每个单元有发射/接收模块的阵列中,\(L_{t}\) 可能仅包括双工器和失配损耗。失配损耗由下式给出:
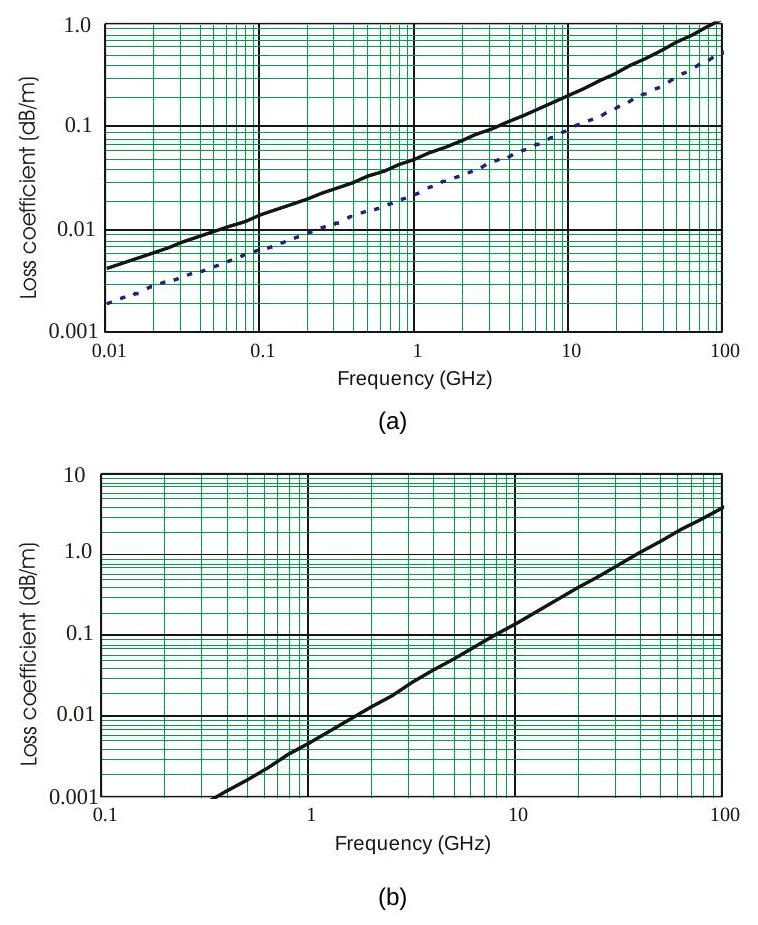
图10.1 (a) 刚性同轴传输线与 (b) 矩形波导的损耗随频率变化情况,数据来自文献 [2]。
其中 \(\Gamma\) 为反射系数,VSWR 为电压驻波比。在电子扫描相控阵中,公式 (6.35) 将反射系数 \(\Gamma\) 表示为相对于正侧向扫描角 \(\theta\) 和单元增益模式指数 \(\beta\) 的函数。由此,扫描区域内的变化损耗为:
10.1.1.2 大气吸收 \(L_{\alpha}\)¶
损耗 \(L_{\alpha}\) 在 Blake 图表(图1.1、1.2)以及公式 (1.20)、(1.22)、(1.23) 和 (1.26) 中被明确列出。它定义为通过真空雷达路径可接收到的能量与实际接收能量的比值,不包括透镜损耗效应,相关内容在第7.2节和7.3节中讨论。在雷达频段内,电离层吸收不显著,但色散效应可能引入在第7.5.5节中描述的损耗。
10.1.1.3 天线模式传播因子 \(F\)¶
天线模式传播因子 \(F\) 在第8章中有详细讨论。
10.1.1.4 极化因子 \(F_{p}\)¶
极化因子 \(F_{p}\) 是指极化接收天线接收到的场强与在自由空间环境中、接收天线极化与目标反射极化匹配时接收到的场强之比。它作为一个常数引入,其值取决于天线极化和回波源的形状。
目标截面 \(\sigma\) 通常是针对线性(H 或 V)发射和接收极化指定的。典型目标及雨的极化因子值见表10.2。雪的极化因子比雨更接近于1,因为雪花更偏离球形。
极化因子还描述了电离层引起的法拉第旋转对线性极化天线的影响,如第7.5.4节所述。在这种情况下,损耗随电离层路径变化,必须作为统计因子处理,如第10.2.1节所述。
干扰天线通常线性极化为 \(45^{\circ}\) 或 \(135^{\circ}\),以在对使用 H、V、LCP 或 RCP 的雷达时提供极化因子 \(F_{p j}^{2}=-3 \mathrm{~dB}\)(见第3.7节和第3.8节)。如果受害雷达使用自适应极化接收天线,则需要两个正交极化天线分别供能的独立干扰发射器,以确保在所有可能的接收极化下 \(F_{p j}^{2}=-3 \mathrm{~dB}\) 均匀。
表10.2 极化因子
| 极化 | 目标 \(F_{p}\) (dB) | 雨 \(F_{p c}\) (dB) | |
|---|---|---|---|
| 发射 | 接收 | ||
| H | H | 0 | 0 |
| H | V | -10 | -15 |
| V | V | 0 | 0 |
| V | H | -10 | -15 |
| RCP | RCP | -3 | -20 |
| RCP | LCP | 0 | 0 |
| LCP | LCP | -3 | -20 |
| L | R | 0 | 0 |
| H 或 V | RCP 或 LCP | -3 | -3 |
| RCP 或 LCP | V 或 H | -3 | -3 |
10.1.2 距离相关响应因子 \(\boldsymbol{F}_{\text {rdr }}\) 的组成部分¶
公式 (1.26) 引入的因子 \(F_{\text {rdr }}\) 包括五个距离相关组成部分,这些部分在雷达方程中通常未单独列出,但会减少接收能量。
10.1.2.1 对流层透镜因子 \(F_{\text {lens }}\)¶
距离相关响应因子 \(F_{\text {rdr }}\) 的组成部分 \(F_{\text {lens }}\) 在第7.4节中讨论。它可以在分母中用透镜损耗 \(L_{\text {lens }}=1 / F_{\text {lens }}\) 替代,但应与大气吸收分开处理,因为只有大气吸收会影响系统噪声温度。
10.1.2.2 灵敏度时间控制因子 \(F_{\text {stc }}\)¶
STC(Sensitivity Time Control,灵敏度时间控制)在射频或接收机早期阶段应用,以减少后续接收机级所需的动态范围。接收机对某一选定范围 \(R_{\text {stc}}\) 内回波的功率增益相对于全增益接收机的变化为:
其中 \(X_{\text {stc}} \leq 4\) 是为维持 \(R<R_{\text {stc}}\) 时目标可探测性而选择的指数。当增益控制在接收机噪声主要来源之前施加时,信噪比被假定相对于全增益接收机所获得的值按 \(F_{\text {stc}}^{2}\) 变化。
如果在增益控制阶段之前存在显著噪声来源,则可推导出更复杂的关系。STC 仅用于低脉冲重复频率(PRF)雷达,其效果如图1.5所示。需要注意的是,当目标处于恒定高度、飞越天线主瓣进入由 \(\csc^2\) 延伸的仰角模式覆盖区域时,在没有 STC 的情况下,目标接近雷达的信噪比保持不变。为了防止 STC 因子将回波降至探测阈值以下,上部覆盖可由 \(\csc\) 函数指数小于2的模式提供,如图2.1所示。
10.1.2.3 波束驻留因子 \(F_{\text {bd}}\)¶
波束驻留因子 \(F_{\mathrm{bd}}\) 是由信号发射与回波接收之间的波束运动引起的。它随目标距离 \(R\) 变化,存在于连续快速扫描波束的系统中,以及在目标回波到达前将波束跳到新位置的系统中。
对于在时间 \(t_{o}\) 内连续扫描一个波束宽度的雷达,目标距离为 \(R\),其信号延迟为 \(t_{d}=2 R / c\),波束驻留因子为:
其中:
波束形状损耗作为乘子包含在 (10.4) 中,用于在 \(\delta \ll 1\) 时将 \(F_{\text {bd}}\) 归一化为1。例如,对于 \(t_{d}=0.5 t_{o}\) 的高斯波束模式,波束驻留因子为 \(F_{\mathrm{bd}}^{2}=-1.5 \mathrm{~dB}\)。在电子扫描阵列中,如果在接收所有所需回波后迅速将波束在每个驻留位置之间跳动,则不存在该损耗。
10.1.2.4 频率多样性因子 \(F_{\text {fd}}\)¶
在频率多样性中,连续发射的 \(n_{fd}\) 脉冲组之间改变频率。对于距离 \(R>n_{tr} R_{u}\) 的目标,每组中最后 \(n_{rt}\) 个回波脉冲上重新调谐的接收机响应为零,即 \(F_{\mathrm{fd}}=0\)。在频率敏捷模式下(雷达频率逐脉冲变化),来自先前发射的所有回波上 \(F_{\text {fd}}=0\)。这消除了对杂波和响应干扰源的探测,也消除了距离模糊目标。该效应未出现在标准雷达方程中,但应在计算机程序中包括,否则可能会将位于无歧义距离之外的目标和干扰的被拒绝能量计入。在大多数应用中,这被认为是消除干扰的有益特性,而非“损耗”因子。
10.1.2.5 遮蔽因子 \(F_{\text {ecl}}\)¶
当表观时间延迟 \(t_{d}^{\prime}=t_{d}\)(模 \(t_{r}\))使回波脉冲与紧邻的前一或后一发射脉冲重叠时,即发生遮蔽。
图10.2 中 (a) 显示了两个连续发射脉冲,间隔为脉冲重复间隔 PRI \(=t_{r}\),以及延迟为 \(t_{d}^{\prime}=0.5 t_{r}\) 的回波脉冲。对于延迟满足 \(\left|0.5 t_{r}-t_{d}^{\prime}\right|>0.5 t_{r}-\tau\) 的信号,会发生遮蔽。图 (b) 显示了未被遮蔽的回波脉冲分数。该分数表示为:
其中 \(D_{u}=\tau / t_{r}\) 为占空比。
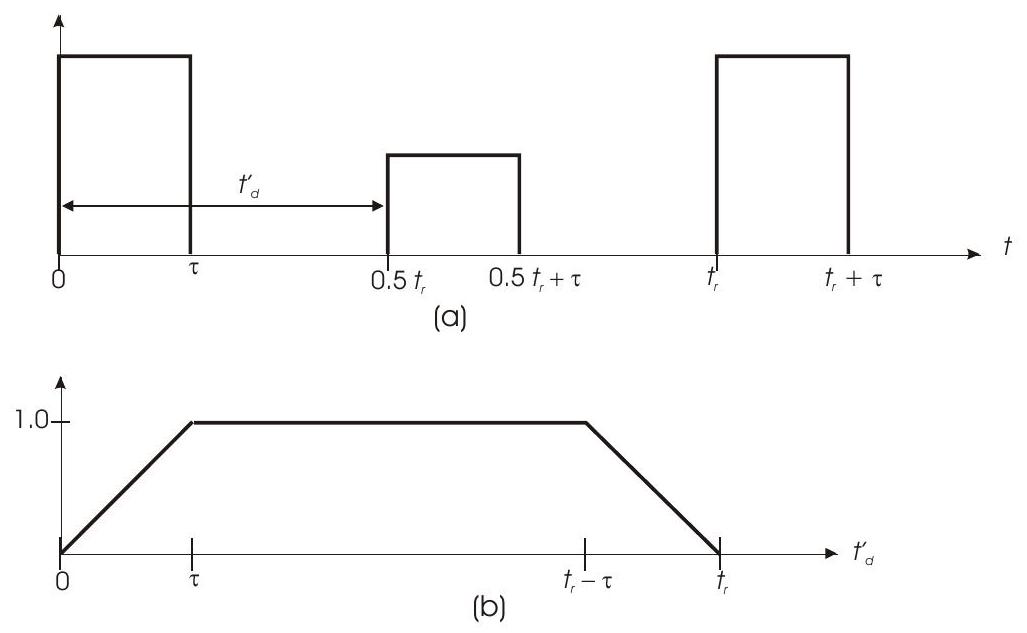
图10.2 遮蔽:(a) 发射脉冲与回波在 PRI 中间,(b) 未遮蔽脉冲分数 \(H_{\text {ecl}}\)。
对于未编码矩形脉冲,遮蔽脉冲能量为 \(H_{\text {ecl}}\) 与其未遮蔽能量之比,不匹配滤波器传递该分数的效率为 \(H_{\mathrm{ecl}}^{2}\),从而得到遮蔽因子:
对于使用脉冲压缩的波形,也适用类似因子。
在低/中 PRF 且使用恒定 PRF 的雷达中,可将公式 (10.6) 给出的确定性因子作为目标距离函数应用,从而产生靠近发射脉冲的可识别区域,其中 \(P_{d}\) 降至接近零(见图1.4)。在高 PRF 雷达中,目标快速通过遮蔽区域,通常在每个波束驻留期间使用 PRF 多样性,以移动这些区域并保留部分目标回波。对于该情况,以及其他需要对不同 PRF 的脉冲组平均 \(P_{d}\) 的雷达,可使用第10.2.1节给出的程序得到统计损耗因子(见图10.4)。
10.1.3 包含在系统噪声温度中的损耗¶
第6章讨论了系统噪声温度 \(T_{s}\) 的计算。除了接收机噪声系数 \(F_{n}\) 外,下列三个射频损耗组成部分也会对 \(T_{s}\) 产生贡献。
10.1.3.1 接收线损耗 \(L_{r}\)¶
接收线损耗 \(L_{r}\) 包含表10.1 中 \(L_{t}\) 的许多组成部分,但不包括可能连接到虚拟负载的发射机开关。用于减少带外干扰的带通滤波器取代了一些发射机所需的谐波滤波器。用于保护低噪声接收放大器的固态限幅器通常会额外贡献 0.2–0.4 dB 的损耗。
10.1.3.2 系统噪声温度中的天线耗散损耗 \(L_{a}\)¶
损耗 \(L_{a}\) 随天线类型变化显著,但可能包括表10.3中列出的组成部分。电子扫描阵列的天线失配可能远大于机械扫描天线或波束朝向正侧的阵列,如第6.3.5节所示。表中所示数值适用于单元模式 \(G_{e}(\theta)=\cos ^{3 / 2} \theta\)。
10.1.3.3 系统噪声温度中的大气吸收损耗 \(L_{\alpha}\)¶
在第6.3.1节计算系统噪声温度时应用该损耗,相关讨论见第7.2节和第7.3节。
10.1.4 搜索雷达方程中的损耗¶
10.1.4.1 余割模式损耗 \(L_{\mathrm{csc}}\)¶
将仰角覆盖延伸到主瓣全程覆盖扇区 \(\theta_{1}\) 以上(见图2.1)会降低天线增益。在雷达方程标准形式中,这表现为 \(G_{t}\)、\(G_{r}\) 或两者减小,但在搜索雷达方程中,相应的损耗 \(L_{\text {csc}}\) 出现在搜索覆盖的立体角 \(\psi_{s}\) 中,同时作为搜索损耗 \(L_{s}\) 的组成部分。\(\csc^2\) 和 \(\csc\) 模式的损耗见公式 (2.11) 和 (2.12),并在图2.2中与中间情况一并显示。
表10.3 天线耗散损耗组成
| 位置 | 组成部分 | 典型损耗 (dB) |
|---|---|---|
| 馈电系统 | 喇叭 | 0.1 |
| 波导串联馈电 | 0.7 | |
| 波导并联馈电 | 0.4 | |
| 条形线串联馈电 | 1.0 | |
| 条形线并联馈电 | 0.6 | |
| 相位移器 | 非互易器或法拉第旋转器 | 0.7 |
| 互易铁氧体 | 1.0 | |
| 二极管(每位) | 0.4 | |
| 阵列 | 失配(无电子扫描) | 0.2 |
| 失配(电子扫描 \(60^{\circ}\)) | 1.7 | |
| 外部 | 天线罩 | 0.5–1.0 |
10.1.4.2 仰角波束形状损耗 \(L_{p e}\)¶
损耗 \(L_{p e}\) 出现在二维雷达搜索方程的搜索损耗 \(L_{s}\) 中。图2.1显示了提供指定全程覆盖的扇形波束,仰角为 \(\theta_{1}=\sin^{-1} H_{m}/R_{m}\)。实现该覆盖所需的半功率波束宽度 \(\theta_{e}\) 超过全程覆盖上限角 \(\theta_{1}\),因子约为 \(L_{p e} \approx 1.5\),使增益 \(G_{t}\) 相对于搜索雷达方程推导中假设的值降低。该因子还必须在选择天线高度时考虑,使有效孔径面积 \(A\) 相对于给定波长的要求减小,如果仰角波束宽度设为 \(\theta_{1}\)。该损耗关于 \(\theta_{e} / \theta_{1}\) 的近似表达为:
10.1.4.3 搜索雷达方程中的天线耗散损耗 \(L_{a}\)¶
第2.6.1节讨论了搜索雷达方程推导中所做的天线增益假设。假设中未包括天线内部的耗散损耗,因此 \(L_{a}^{2}\) 必须作为 \(L_{s}\) 的组成部分,以考虑发射和接收中的损耗,同时在系统噪声温度计算中也要包括 \(L_{a}\)。
10.1.4.4 模式常数 \(L_{n}\)¶
第2.6.1节还讨论了需要将该因子作为 \(L_{s}\) 的组成部分,以修正实际天线中 \(G_{t}<4 \pi / \theta_{a} \theta_{e}\) 的情况(与搜索雷达方程推导中使用的矩形波束不同)。该损耗可通过波束宽度因子 \(K_{\theta}\) 和孔径效率 \(\eta_{a}\) 计算为:
所有天线适用 \(L_{n}=1.16-1.28 \mathrm{~dB}\),透镜或反射天线额外溢出损耗约 0.5 dB,带前置馈源的反射天线阻塞损耗为 0.6–1.2 dB。
10.1.4.5 搜索雷达方程中的天线照射损耗 \(L_{\eta}\)¶
当搜索雷达方程 (2.7) 或 (2.8) 中使用物理孔径 \(A\) 时,搜索损耗 \(L_{s}\) 必须包含照射损耗,该内容将在第10.1.5.1节讨论。该损耗仅对 \(L_{s}\) 应用一次,因为照射衰减对发射增益的影响已包含在因子 \(L_{n}\) 中。
10.1.4.6 扫描分布损耗 \(L_{d}\)¶
扫描分布损耗描述在搜索时间 \(t_{s}\) 内对搜索体积执行两次或多次扫描时积分性能的损失。探测要求通过累积探测概率而非单次扫描的 \(P_{d}\) 来满足。该损耗定义为在 \(m\) 次扫描中每次扫描 \(n/m\) 脉冲进行累积探测时所需信噪比与单次扫描 \(n\) 脉冲所需信噪比的比值。
Marcum [3, pp. 13-14] 讨论了使用 \(m\) 组单独积分脉冲实现探测的效果。他指出“[ \(m\) ] 最好总是等于1。”对于大多数情况下的稳定目标,该结论是正确的,但对于波动目标,在分配的搜索时间内使用两次或更多次扫描可能获得更好的性能。
该损耗使用二进制积分损耗表达式(第10.2.5.1节)计算,\(m=1\),并通过依赖于单次扫描 \(P_{d}\) 的其他损耗进行调整。例如,波束形状损耗 \(L_{p}\) 和遮蔽损耗 \(L_{\text {ecl}}\) 随 \(P_{d}\) 增大而急剧增加。计算 \(L_{d}\) 的方法是定义有效可探测性因子 \(D_{x m}(m)\) 为:
其中:
扫描分布损耗为:
这可能导致 \(L_{d}<1\),表示在 \(t_{s}\) 时间内使用 \(m\) 次扫描体积时获得的时间多样性增益。
10.1.4.7 搜索雷达方程中的其他损耗¶
第10.1.5.3节讨论的其他天线损耗也包含在搜索雷达方程中,无论发射方向还是接收方向,这会使它们对 \(L_{s}\) 的分贝贡献加倍。此外,所有对 \(D_{x}\) 有贡献的损耗(如下文第10.2节所述)也作为 \(L_{s}\) 的组成部分包含在内,因为该方程的分母使用单脉冲稳定目标的可探测性因子 \(D_{0}(1)\)。
10.1.5 包含在天线增益中的损耗¶
几个损耗项表现为天线增益的降低,但在此列出,以确保它们被包括在天线增益中、模式传播因子中,或单独加到雷达方程中。
10.1.5.1 天线照射损耗 \(L_{\eta}\)¶
雷达方程中指定了天线增益 \(G_{t}\) 和 \(G_{r}\)。可通过物理孔径面积 \(A\) 计算:
其中 \(G_{0}\) 为均匀照射的孔径增益,\(\eta_{a}\) 为孔径效率。照射效率 \(\eta_{i}\) 是孔径效率的一个组成部分,照射损耗定义为 \(L_{\eta}=1 / \eta_{i}\)。图10.3 显示了矩形孔径在两个坐标使用相同照射渐缩,以及椭圆孔径的侧瓣水平与照射损耗的关系。对于不同照射,损耗取两个损耗的几何平均。Hansen 照射指 [4, pp. 107-111] 中讨论的单参数圆形照射。具有最大损耗增长率的圆形照射函数形式为:
如 [5, p. 264] 所列。这代表了反射面或透镜天线使用简单喇叭馈电所产生的照射模式。

图10.3 不同渐缩照射族的两坐标照射损耗与侧瓣水平的关系。
10.1.5.2 天线增益中的天线耗散损耗 \(L_{a}\)¶
当指定天线增益时,假设效率 \(\eta_{a}\) 已包含耗散损耗分量 \(\eta_{\Omega}=1 / L_{a}\)。
10.1.5.3 天线增益中的其他损耗¶
假设孔径效率 \(\eta_{a}\) 还包括以下损耗:
- 溢出损耗:透镜或反射天线约为 \(\approx 0.5 \mathrm{~dB}\);
- 阻塞损耗:反射天线为 \(0.6-1.2 \mathrm{~dB}\);
- 尺寸公差:均方根相位误差 \(\sigma_{\phi}\) 描述孔径偏离其假定形状的距离 \(\sigma_{a s}\),引起的损耗为:
其中 \(k_{a s}=2\) 用于反射面,\(k_{a s}=1\) 用于平面阵列和透镜表面。当透镜的馈电侧和辐射侧具有相同偏离(例如整个结构弯曲)时,\(k_{a s} \rightarrow 0\)。
- 信号带宽损耗:虽然反射面和金属透镜天线通常具有超过信号带宽 \(B\) 的带宽,但阵列天线带宽有限,在宽带信号尤其偏离主瓣时会造成增益损耗。该主题见 [1, pp. 170-172]。
- 阵列相位误差损耗:损耗 \(L_{\phi}=\exp \left(\sigma_{\phi}^{2}\right)\),其中 \(\sigma_{\phi}\) 为馈电和相位移器的均方根相位误差。
- 相位移器量化损耗:将相移控制量化到 \(m\) 位造成的损耗为:
- 天线失配损耗:公式 (10.1) 所表示的损耗同样适用于天线失配。
- 扫描损耗:阵列偏离主瓣角 \(\theta\) 时增益由单元因子减少:
其中 \(1<\beta<2\)(通常约为 1.5)。当雷达方程应用于特定离主瓣角的目标时,天线增益按此损耗降低。对于由开口波导构成的固定电阵列,波束偏离主瓣角度 \(\theta\),\(\beta \approx 1\) 时同样适用。当雷达方程使用主瓣增益,并在从主瓣延伸 \(\theta_{s}\) 的扇区上对探测性能求平均时,定义扫描损耗为维持指定探测概率所需轴向信噪比的增加。这作为所需信号能量的增加被包含(见第10.2.1节)。
- 余割模式损耗:第10.1.4节描述的损耗 \(L_{\mathrm{csc}}\) 在二维雷达中降低天线增益 \(G_{t}\) 和 \(G_{r}\),在叠波束三维雷达中降低 \(G_{t}\)。
- 水膜损耗:大多数雷达天线将发射和接收信号通过介电窗或覆盖物与环境隔离。介质材料损耗通常很小,但在必须承受风力的天线罩中可能增加(见表10.3),且当水膜由凝结或降水形成时可能增加。表10.4显示了在Sand K和Ku频段,不同膜厚下计算的损耗。反射面上的水膜通常不够厚而造成损耗,因为表面电场下降至零,无法将能量传递给水膜,除非膜厚大于波长的百分之一。
表10.4 水膜损耗
| 膜厚 (mm) | 天线罩损耗 (dB) | 反射器损耗 (dB) | ||
|---|---|---|---|---|
| \(f=3.7 \mathrm{GHz}\) | \(f=16 \mathrm{GHz}\) | \(f=3.7 \mathrm{GHz}\) | \(f=16 \mathrm{GHz}\) | |
| 0.05 | - | 3.2* | - | - |
| 0.13 | 1.1 | 5.3 | ≤0.01 | 0.03 |
| 0.25 | 1.1 | 5.3 | ≤0.01 | 0.2 |
| 0.38 | 4.2 | 10.9 | ≤0.01 | 0.9 |
| 0.5 | 5.6 | 12.3 | ≤0.01 | 2.7 |
注:理论数据来源 [6]。* 表示实验数据来源 [7]。
10.2 所需信号能量的增加¶
10.2.1 统计损耗¶
有些损耗因素并不直接出现在雷达方程中,而是导致有效可探测性因子 \(D_{x}\) 增大,表示为了达到所需的探测概率 \(P_{d}\) 所需的轴向能量比。这些损耗有些是常量,但其他的是统计损耗,因为其值依赖于在一个变量 \(z\) 上对探测概率 \(P_{d}\) 的平均。\(z\) 表示目标在雷达空间四维中的位置(或回波的极化角)。在每种情况下,损耗 \(L_{z}\) 被定义为保持期望 \(P_{d}\) 所需的输入信噪能量比 \(E / N_{0}\) 随 \(z\) 在指定范围内变化而增加的量。如果理想系统所需的能量比为 \(D\),则当存在 \(L_{z}\) 时,需求增加为 \(L_{z} D\)。各个 \(L_{z}\) 分量针对所需的 \(P_{d}\) 计算,并将损耗乘积应用于分母,从而得到出现在 (1.20)、(1.23) 及类似方程中的有效可探测性因子:
计算统计损耗的一般步骤是将雷达系统的响应 \(H(z)\) 表示为输出信号与在对 \(z\) 不敏感情况下的参考值的电压比。应用于探测装置的信噪功率比 \(s_{o}^{\prime}\) 为:
其中 \(s_{o}\) 为无损耗时的信噪比。 指定目标模型的理论探测概率 \(p_{d}\left(s_{o}\right)\) 在第4章给出。存在损耗时,探测概率降至:
当对 \(z\) 的可能值求平均时,探测概率为:
其中 \(p_{t}(z)\) 为雷达和目标条件导致回波出现在位置 \(z\) 的概率。
为了计算 \(L_{z}\),通过改变 (10.20) 中的 \(s_{o}\),直到满足探测要求 \(P_{a v}=P_{d}\),得到值 \(s_{d 0}\left(P_{d}\right)\)。由此 \(L_{z}\) 为:
其中 root 函数为满足方括号内等式的 \(s_{o}\) 值。通常 (10.21) 无闭式解,但可用计算机程序针对任意 \(p_{t}(z)\)、\(H(z)\) 和目标统计数据求解。相应的距离依赖响应因子为 \(F_{\text {rdr }}^{2}=1 / L_{z}\)。
10.2.1.1 遮挡损耗 \(L_{\mathrm{ecl}}\)¶
遮挡损耗是从距离依赖因子 \(F_{\text {ecl }}\) 统计导出的,用于高PRF雷达的雷达方程中,以求得在回波的表观延迟随 \(z\) 在指定范围内变化时的平均 \(P_{d}\) 所对应的距离(见第10.1.2.5节)。因子 \(F_{\text {ecl }}\left(t_{d}^{\prime}\right)\) 代替 (10.21) 中的 \(H(z)\),积分范围为 \(0<t_{d}^{\prime}<t_{r}\)。回波通常被建模为在PRI内均匀分布:\(p_{t}(z)=1\)。
图10.4显示了当针对PRI内均匀分布的Case 1目标取平均 \(P_{d}\) 时的 \(L_{\text {ecl }}\)。可以看到,随着占空比增加,高 \(P_{d}\) 会导致较大的损耗。通过使用不同PRI的两组或更多脉冲组可获得高累积探测概率,从而每组的 \(P_{d}\) 降低,降低 \(L_{\mathrm{ecl}}\)。
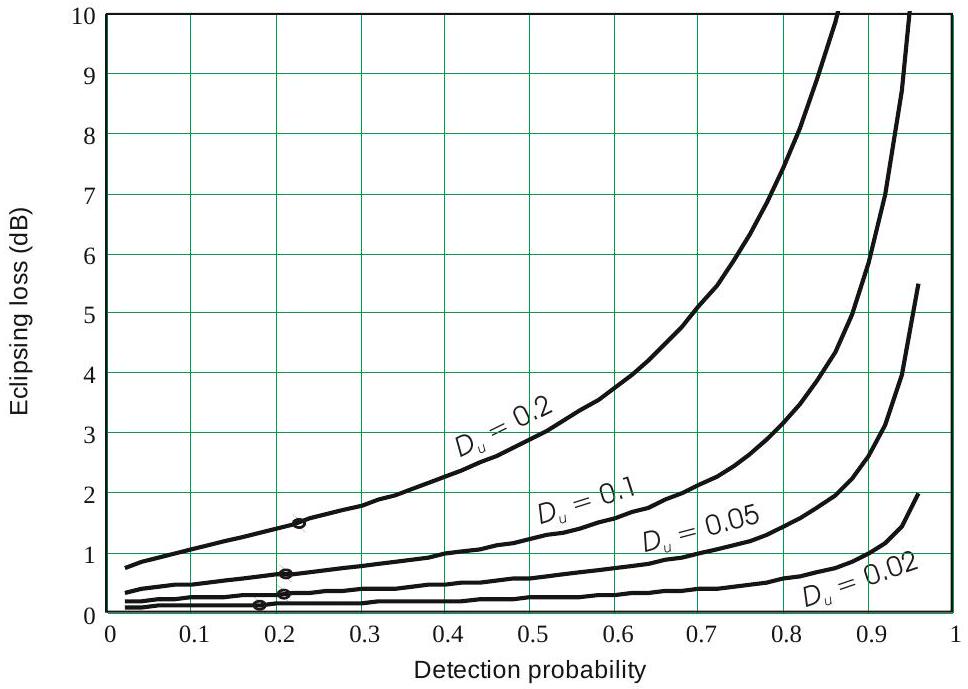
图10.4 遮挡损耗随不同占空比的探测概率变化。每个占空比下 \(L_{\mathrm{av}}\) 的值在 \(P_{d}=0.2\) 附近以圆圈表示。
这种统计损耗可与定义为对 \(t_{r}\) 平均的 \(H_{\mathrm{av}}^{3}\) 的倒数的损耗 \(L_{\text {ecl }}\) 相比较,图中左下角附近的圆圈即表示该值。对于 \(P_{d}>0.25\),统计损耗更大,而当 \(P_{d} \rightarrow 1\) 时则显著更大。
10.2.1.2 法拉第旋转损耗 \(L_{\text {Far }}\)¶
法拉第旋转角 \(\phi(h)\) 随路径至目标高度 \(h\) 的总电子数变化,如 (7.44) 所示。线性极化雷达天线对该角的响应可表示为:
该表达式代入 (10.21) 中的 \(H(z)\),积分范围为 \(0-\phi_{m}\),以计算法拉第旋转损耗。图10.5显示了 \(L_{\mathrm{Far}}\) 随 \(P_{d}\) 的变化,旋转角从零到不同的最大值 \(\phi_{m}\)。最坏情况发生在 \(\phi_{m}=120^{\circ}\),此时 \(H_{\mathrm{Far}}<-3 \mathrm{~dB}\) 占 0 到 \(\phi_{m}\) 区间的 67%。任意整数次完整旋转的平均接收功率损耗为3 dB,但可见当 \(P_{d}>20\%\) 时,\(\phi_{m}=90^{\circ}\) 的统计损耗大于该平均值。
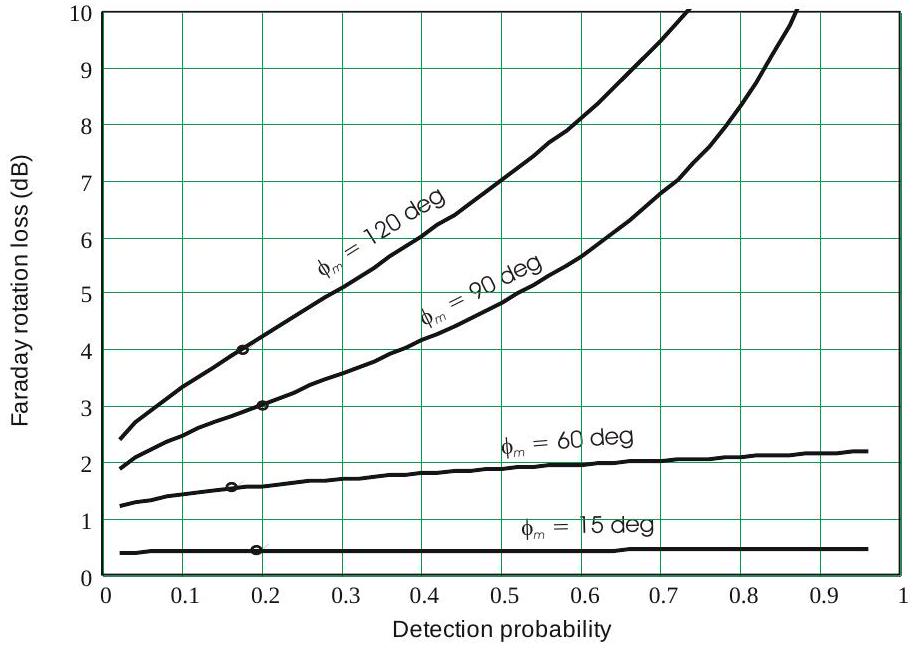
图10.5 线性极化天线的法拉第旋转损耗,随旋转角从零到不同 \(\phi_{m}\) 的平均探测概率变化。每条曲线附近圆圈表示平均接收功率损耗。任意整数次完整旋转的损耗遵循 \(\phi_{m}=90^{\circ}\) 曲线。
10.2.1.3 扫描扇区损耗 \(L_{\text {sector }}\)¶
第10.1.5.3节讨论了在使用特定扫描角度时的损耗 \(L_{\mathrm{sc}}\)。当扫描覆盖一个需要达到指定平均 \(P_{d}\) 的扇区时,使用统计损耗方法 (10.21) 在扫描扇区范围内计算,其中 \(H(\theta)=\cos ^{\beta / 2}(\theta)\),\(p_{t}(\theta)\) 表示扇区内目标位置的概率密度(通常假设均匀)。
图10.6显示了扫描扇区损耗随不同最大扫描角 \(\theta_{m}\) 的 \(P_{d}\) 变化,扫描扇区扩展至 \(\pm \theta_{m}\)。为了比较,每条曲线上的圆圈表示该扇区的平均功率损耗,当 \(P_{d}>20\%\) 时,该平均值被超过。
图10.6 扫描扇区损耗随扇区平均探测概率变化,扇区范围为 \(\pm \theta_{m}\)。每条曲线附近的圆圈表示功率平均损耗,约在 \(P_{d}=20\%\)。
10.2.2 基本可探测性因子中的损耗¶
基本可探测性因子,标记为 \(D_{0,\ldots,4}\),用于稳态和Swerling目标,是在考虑波束形状、匹配和信号处理损耗前的理论值。其值如第4章所示计算,同时将理论扩展到使用多样性观测的目标可探测性因子 \(D_{e}\)。在这些因子中,包括两个应用于基本单脉冲稳态目标因子 \(D_{01}\) 的损耗,用于推导 \(n\) 脉冲积分和波动目标的因子。这些损耗未单独出现在雷达方程中,但在比较不同波形和处理选项的性能时很有用。例如,图4.12显示了这些损耗总和随多样性样本数量的变化,探测概率增加时,最优样本数量从1增加到8。
10.2.2.1 积分损耗 \(L_{i}\)¶
积分损耗在第4.4.3节中讨论,并在图4.9中绘制为不同 \(D_{01}\) 值下随脉冲数 \(n\) 的变化曲线,这些 \(D_{01}\) 的探测性能需要通过接收能量比 \(n D_{0}(n)\) 来匹配。
10.2.2.2 波动损耗 \(L_{f}\)¶
波动损耗在第4.4.5节中讨论,并在图4.10中绘制了Case 1目标的曲线。第4.4.7节讨论了当 \(n\) 个积分脉冲中包含的独立目标样本数 \(n_{e}\) 变化时,损耗如何变化。
10.2.2.3 检波器损耗 \(C_{x}\)¶
在第4.4.2节中,描述了包络检波器非线性引起的SNR损耗,并用检波器损耗 \(C_{x}\) 表示,其相对于具有同相参考电压的相干(相位敏感)检波器的SNR定义。一个经验表达式为:
其中 \(s\) 为包络检波器的输入SNR,[8] 中发现该表达式可在可接受的精度范围内重现基于包络检波器输出的检测系统性能。该损耗包含在积分损耗项中,无需单独计算。
10.2.3 匹配与带宽损耗¶
Blake的基本雷达方程 (1.16) 包含一个带宽修正因子 \(C_{b}\),用于在非最佳接收机带宽下乘以可探测性因子。Hall和Barton的后续工作将 \(C_{b}\) 替换为匹配损耗 \(L_{m}\) 或匹配因子 \(M\),用于电子检测应用。
10.2.3.1 带宽修正因子 \(C_{b}\)¶
第1.5.4节指出,(1.17) 中给出的 \(C_{b}\) 因子不适用于电子检测设备。它仍然可用于乘以可视性因子 \(V_{0}\) 来表征视觉检测过程。Blake [9, p. 366, Eq. (8.14)] 给出的正式定义将与下一节中匹配损耗的表达式结果相同,但绘制的值 [9, p. 367, Figure 8-2] 并不代表该结果。相反,它给出了Haeff [10] 报告的实验值,即在改变接收机带宽时,为保持显示可见性所需的额外能量比。Blake指出,这些图表示的简单概念不适用于使用“脉冲群或其他非简单波形”的雷达。
10.2.3.2 匹配损耗 \(L_{m}\)¶
第1.4.1节给出了Hall的雷达方程 (1.20),其中有效可探测性因子用于通过五个损耗因子增加基本可探测性因子 \(D(n)\):\(D_{x}=D(n) L_{m} L_{p} L_{c} L_{x} L_{o}\)。匹配损耗 \(L_{m}\) 定义为在相同输入条件下,匹配滤波器的峰值输出SNR与不匹配滤波器的峰值输出SNR之比。对于信号电压谱 \(A(f)\) 和滤波器响应函数 \(H(f)\),其计算公式为:
图10.7显示了未编码矩形脉冲在不同滤波器类型下,脉冲宽度 \(\tau\) 与接收机噪声带宽 \(B_{n}\) 乘积的匹配损耗。除 \((\sin x)/x\) 匹配滤波器外,最佳性能为 \(L_{m}=0.5~\mathrm{dB}\),由高斯滤波器获得,该滤波器表示若干单极滤波器级联,总体响应为 \(B_{n} \tau=0.8\)。
图10.8显示了加权线性FM波形在不同加权函数下,匹配损耗随时间旁瓣电平的变化曲线。这些曲线与图10.2(a)中给出的照明渐缩损耗曲线类似。
图10.7 不调制矩形脉冲在不同中频滤波器类型下,乘积 \(\tau B_{n}\) 与匹配损耗 \(L_{m}\) 的关系。资料来源:[1]。
图10.8 加权线性FM波形在不同加权函数下,时间旁瓣电平与匹配损耗 \(L_{m}\) 的关系。
10.2.3.3 匹配因子 \(M\)¶
在Barton的雷达方程 (1.23) 及附图1.2的修改Blake图中,\(L_{m}\) 被匹配因子 \(M\) 替代。该因子对 \(L_{m}\) 做了两方面修改:
- 当接收机滤波器 \(B_{n} \tau>1\) 且检波后(视频)带宽 \(B_{v} \geq B_{n}/2\) 时,匹配损耗 \(L_{m}\) 描述检测电路处SNR的降低。然而,在许多情况下,\(B_{v}<B_{n}/2\) 可以减少进入检波器的噪声。结果是矩形滤波器的有效带宽为 \(B_{n}\) 与 \(2 B_{v}\) 中的较小值,否则由以下公式给出:
进入包络检波器的较大噪声导致折叠比 \(B_{n}/B_{\text{eff}}\) 并产生折叠损耗 \(L_{c}\)(见第10.2.5.4节)。(10.25) 中的 \(L_{m}\) 与 \(L_{c}\) 的乘积给出了正确的匹配因子 \(M\),通常小于仅用 \(B_{n}\) 计算的 \(L_{m}\),但差异通常足够小,可忽略。
- 对于 \(B_{\text{eff}}\tau<1\),峰值SNR按 (10.24) 减少,但输出脉冲展宽,在信号缺失期间到达包络检波器的噪声样本减少。这降低了虚警率,并允许增加虚警概率,从而降低阈值和所需的可探测性因子 \(D_{x}\),相对于仅使用 \(L_{m}\) 计算时。由于 \(P_{fa}\) 的小变化对 \(D\) 的影响很小,这一差异通常可以忽略。
在大多数情况下,使用 (10.25)、图10.7 或图10.8 中的 \(L_{m}\) 足够准确,无需额外计算有效带宽和虚警概率调整。
10.2.4 波束形损耗 \(\boldsymbol{L}_{\boldsymbol{p}}\)¶
波束形损耗是第5章的主题,适用于所有雷达在搜索和获取目标过程中,除非波束轴可以放置在目标上且偏离波束宽度的一小部分。在使用Blake图或创建垂直覆盖图(见图1.6)时,目标相对于波束轴在仰角方向上的位置包含在模式-传播因子 \(F\) 中,而只有一维波束形损耗作为雷达方程分母中可探测性因子的乘子出现。然而,当使用搜索雷达方程或计算二维角度扇区上的探测概率时,应使用第5.4节和5.5节中的二维损耗 \(L_{p2}\) 代替 \(F\)。
第5章中用于区分不同波束形损耗的符号:
- \(L_{p0}=\) 密集采样下的一坐标损耗;
- \(L_{p1}=\) 一坐标通用情况损耗;
- \(L_{p2}=\) 二坐标通用情况损耗;
- \(L_{pn}=\) 调整波束间距后的净波束形损耗,用于搜索雷达方程;
- \(L_{pT}=\) 三角形波束网格的二坐标损耗。
10.2.5 信号处理损耗 \(\boldsymbol{L}_{\boldsymbol{x}}\)¶
Blake图中出现的杂项损耗 \(L_{x}\) 包含若干分量,如下所列,这些分量来源于不能保持接收机输出SNR的信号处理步骤。这些损耗不一定是设计缺陷造成的,但可能伴随拒绝杂波和其他干扰虚警所需的处理步骤。
10.2.5.1 二进制积分损耗 \(L_{b}\)¶
二进制积分使用双阈值系统,其中每个 \(n\) 个脉冲都应用于第一个阈值,以实现探测概率 \(p_{d}\) 和虚警概率 \(p_{f}\)。来自第一个阈值的输出在 \(n\) 个脉冲上累加,当 \(n\) 个脉冲中至少获得 \(m\) 个输出时发出警报。这是一种视频积分的替代方法,有时称为 \(m\)-出- \(n\) 积分。
从第一个阈值获得 \(j\) 个输出的概率为:
其中 \(P(j)\) 表示在 \(n\) 次试验中恰好发生 \(j\) 次阈值跨越的概率,每次试验的阈值跨越概率为 \(p\)。输出警报的概率为:
输出虚警概率通过令 (10.26) 中的 \(p\) 为噪声单独超过每次试验阈值的概率 \(p_{fa}\) 得出:
给定积分器输出所需的 \(P_{fa}\),通过 (10.28) 求出所需的单脉冲 \(p_{fa}\)。然后,依据单脉冲SNR,从第4章的公式求出单脉冲 \(p_{d}\),并用下式求输出 \(P_{d}\):
若给定 \(P_{d}\) 要求,则需通过 (10.29) 求所需单脉冲 \(p_{d}\),并根据第4章公式求得与 \(p_{d}\) 和 \(p_{fa}\) 对应的可探测性因子 \(D_{b}(n)\)。
最优 \(m\) 的范围相当宽,接近Schwartz [11] 对大 \(n\) 的确定值:
图10.9比较了最优二进制积分的积分损耗与视频积分损耗 \(L_{i}(n)\)。二进制积分在视频积分基础上增加的额外损耗称为二进制积分器损耗 \(L_{b}\),对于 \(n \geq 5\) 约为 1.4 dB。采用此近似,可避免通过 (10.29) 求解单脉冲概率的繁琐过程,而使用视频积分公式并将信号处理损耗增加 \(L_{b}=1.5~\mathrm{dB}\)。这一损耗通常被认为是可接受的,因为它简化了硬件设计,并且1-bit A/D转换对大幅度随机脉冲干扰有显著保护作用。无论干扰脉冲多大,它只能在第一次阈值跨越计数中增加1。对于 \(n=2,3,4\),损耗高于图10.9中曲线,分别达到1.6、2.2和2.4 dB。

图10.9 不同积分方法的积分损耗比较(计算条件:\(P_{d}=0.9, P_{fa}=10^{-6}, D_{0}(1)=13.2~\mathrm{dB}\))。资料来源:[1]。
图10.9中还显示了 \(m=1\) 的二进制积分曲线,有时称为累积积分。当累积积分在 \(n>1\) 扫描中进行时,视频积分的 \(L_{i}\) 与 \(m=1\) 二进制积分的 \(L_{b}\) 之间的差即为扫描分布损耗(见第10.1.4节)。
10.2.5.2 CFAR 损耗 \(L_{g}\)¶
CFAR(恒虚警率)损耗源于使用自适应阈值以减少可变或非高斯干扰导致的虚警。典型实现为图10.10所示的距离单元平均 CFAR。\(m\) 个相邻距离单元的包络检波输出可通过抽头延迟线同时获得,其中中心抽头代表检测单元。\(m\) 个参考抽头取平均以形成目标附近雷达波束内噪声与干扰的估计 \(w\),并将检测单元幅度 \(x_{s}\) 与该平均值的比值作为视频输出。实际上,阈值 \(E_{t}\) 是根据局部噪声估计进行缩放,而不是像前述讨论中那样使用先验值。
图10.10 距离单元平均 CFAR。(来源:Gregers-Hansen [12])
由于 \(m\) 个相邻样本平均的干扰估计存在误差,因此应用于该平均值的权重 \(w\) 必须高于完美估计时的值。因此,阈值围绕正确估计上下浮动,大部分时间过高,相对于固定阈值在正确水平时,\(P_{d}\) 减小。这需要提高 SNR,这一增量即为 CFAR 损耗。图10.11 显示了单脉冲探测(\(n=1\))的 CFAR 损耗。
图10.11 中的有效参考样本数 \(m_{\text{eff}}\) 计算如下,其中 \(m\) 为图10.10的抽头数:
- 对于图10.10中的 \(m\)-单元平均:
$$ m_{\text {eff }}=m, \text{平方律检测器;} $$
$$ m_{\text {eff }}=(m+k)/(l+k), \text{其中 } k=0.09 \text{(包络检测器)或 } 0.65 \text{(对数检测器)}. $$
-
使用最大选择法: \(k=0.37\)(平方律检测器),0.5(包络检测器),1.26(对数检测器)。
-
对于硬限制 CFAR,增加 1 dB 限幅损耗,并设置 \(m_{\text {eff }}=(B_{w}/B_{n})-1\)(Dicke-fix 接收机)或 \(m_{\text {eff }}=B\tau-1\)(色散或脉冲压缩 CFAR)。
图10.11 单次命中探测的 CFAR 损耗通用曲线(适用于稳态或瑞利目标)。来源:Gregers-Hansen [12]。
图10.11曲线的近似表示为:
10.2.5.3 积分器加权损耗 \(L_{v}\)¶
理想的视频积分器过程对每个 \(n\) 个脉冲施加的权重应匹配扫描雷达的双向天线增益包络。此过程在第5章用于计算波束形损耗 \(L_{p 0}=1.33=1.24~\mathrm{dB}\)。Blake [13, 14] 假设积分器在半功率波束宽度的最优分数上使用均匀权重,得到损耗 \(L_{p}=1.6~\mathrm{dB}\),为固有波束形损耗增加了 0.27 dB 的积分器加权损耗。对于其他加权函数(例如 Trunk [15, 16] 分析的指数或双指数函数),损耗 \(L_{v}\) 在 0.14 到 0.34 dB 之间变化。
对于电子扫描雷达在固定波束驻留期间接收的脉冲,均匀权重为最优。
10.2.5.4 折叠损耗 \(L_{c}\)¶
折叠损耗定义为 [17]:
当分辨单元或仅包含噪声的样本与包含信号和噪声的样本一起积分时,为维持给定探测概率而需要的输入信号噪声比增加。注:例如,当包含距离、方位和俯仰信息的雷达回波被限制显示在二维屏幕上时,就会发生此类损耗。
二维显示将三维信息折叠。折叠比 \(\rho\) 定义为:
其中 \(n\) 为包含信号和噪声的样本数,\(m\) 为仅包含噪声的样本数。使用平方律检测器时,折叠损耗 \({}^{1}\) 可按积分损耗 \(L_{i}\) 的增加来计算:
\({}^{1}\) Trunk [18] 表明,当使用线性包络检测器时,折叠损耗更大。
当保持虚警概率 \(P_{f a}\) 不变时适用。在其他情况下,例如通过折叠过程扩展了分辨单元(如用于积分的距离门过宽或脉冲因带宽或显示分辨率不足而扩展),可通过允许虚警概率增加为 \(\rho P_{f a}\) 并按 \(D(\rho n)\) 对应 \(P_{f a}\) 与 \(D(\rho n)\) 对应 \(\rho P_{f a}\) 的比值减少 (10.33) 的损耗:
10.2.5.5 MTI 损耗 \(L_{\text{mti}}\)¶
识别出三类 MTI 损耗:
- 噪声相关损耗 \(L_{\text{mti(a)}}\)。MTI 的使用不会改变广泛分布速度目标的平均 \(S/N\),但仍引入了对更高输入信号的需求,从而增加可探测性因子 \(D_{x}\)。噪声通过 \(x\) 脉冲 MTI 消除器时,会在连续 \(x\) 个输出中产生部分相关 [19]。这会将可用于后续处理积分的独立噪声样本数从 \(n\) 降低为 \(a n\),其中:
相应的损耗为积分 \(an\) 脉冲与 \(n\) 脉冲可探测性因子的比值:
- 若 MTI 系统将信号下变频至基带处理,则最好为同相 (I) 和正交 (Q) 分量各使用两个并行消除器。如果未包含 Q 通道消除器,则独立噪声样本数进一步减半:
- 批处理时,\(x\)-脉冲消除器作用于 \(n/x\) 个不同 PRF 的批次,可用于积分的输出数变为 \(n/x\),得到:
通常仅使用 I 通道消除器时不会进行批处理,但在此情况下,有效样本数会从 \(n/x\) 进一步减少到 \(n/2x\)。
- 盲相损耗 \(L_{\text{mti(b)}}\)。仅使用 I 通道双极视频会丢弃噪声和信号的 Q 分量。积分效应按 (10.37) 计算,同时目标波动损耗增加。瑞利目标(自由度 \(2K=2\))转换为高斯目标(\(K=1\))。若目标在 \(t_0\) 期间相位变化足够以在 I 通道输出中显示全幅,波动损耗增加不显著。但在批处理系统中,若仅有一个输出样本,具有 \(2Kn_e\) 自由度目标的波动损耗(dB)加倍:
- 速度响应损耗 \(L_{\text{mti(c)}}\)。当平均所有目标速度时,通过消除器系统后 \(S/N\) 保持不变,但位于响应零点附近的个体目标可能被 MTI 消除或显著抑制。这是一种统计损耗,如 10.2.5 节所示计算。图10.12显示了该损耗随探测概率变化的情况,并定义为维持探测概率所需的输入信号增加。由于在高 \(P_d\) 下该损耗很大,因此几乎总是采用 PRF 交错或多样性。
图10.12 MTI 速度响应损耗随探测概率变化(实线为 Case 1 目标,虚线为稳态目标)。来源:[1]。
10.2.5.6 脉冲多普勒损耗¶
脉冲多普勒处理器中出现的几类损耗如下:
- 多普勒滤波匹配损耗 \(L_{mf}\)。相对于在相干积分时间 \(t_f\) 内接收的脉冲列包络匹配的滤波器的损耗。它取决于在 \(t_f\) 内应用的加权以获得所需滤波器旁瓣水平。对于给定旁瓣水平的滤波器性能,可使用图10.7的曲线,将脉宽因子替换为滤波器带宽因子,并通过效率曲线计算损耗:
- 距离门匹配损耗 \(L_m\)。当在多普勒滤波器输入端使用宽度为 \(\tau_g\) 的距离门时,该门与前置 IF 滤波器的组合响应应匹配发射脉冲。若使用宽带 IF 且门为矩形,则:
若使用短采样脉冲代替距离门,则 \(L_m\) 由前置 IF 滤波器决定。
-
脉冲多普勒速度响应损耗 \(L_{vr}\)。在低/中 PRF 雷达中,目标速度可能超过盲速,PRF 多样性用于填充响应不足的区域,以保证对别名至 \(\pm \Delta_v / 2\) 的目标的探测性能。输入信号能量比必须增加以在指定速度区域获得期望平均 \(P_d\),该增加即为速度响应损耗。没有通用公式,但若将图10.4的蝕降损耗曲线中的占空比 \(D_u\) 替换为滤波器响应低于 -6 dB 的速度分数,也可表示速度响应损耗。
-
瞬态门控损耗。若相干处理时间 \(t_f\) 包含 \(n_f\) 个填充脉冲以建立稳态杂波输入,处理器必须在输入到多普勒滤波器前门控这些脉冲以去除初始瞬态。瞬态门控损耗反映相对于 CPI 内发射的 \(n_c\) 个脉冲的输入能量损失:
10.2.5.7 跨距损耗(Straddling Losses)¶
无论电子处理为模拟还是数字形式,四维雷达空间都在离散点采样。若采样点间距大于分辨单元的一小部分,位于采样点之间的目标信号 SNR 会在处理器输出端降低。
-
距离跨距损耗 \(L_{er}\)。距离门或采样脉冲通常间隔约 \(\tau\),但信号峰值未落在门或采样中心时,输出幅度减小。损耗量依脉冲形状、门宽及间距而定。对矩形脉冲通过矩形 IF 滤波器,损耗随采样间距变化如图10.13所示。
-
滤波器跨距损耗 \(L_{ef}\)。信号可能位于多普勒滤波器之间,引入滤波器跨距损耗。若使用加权滤波器且其在 -3 dB 处重叠,则该损耗可忽略(图10.14)。
-
角度跨距损耗 \(L_{ea}\)。扫描天线对角度空间采样的峰值可能位于两个处理批次之间,造成角度跨距损耗。若采用移动窗口积分而非批处理或脉冲多普勒相干处理,则该损耗不存在。分割观测时间成多个批次可减小该损耗,但若未对批次输出做移动窗口积分,会降低积分增益。批次重叠处理可减轻损耗,但若处理为相干,将限制脉冲间 PRF 或 RF 灵活性。
图10.13 对于矩形脉冲通过矩形滤波器且 \(B \tau=1.5\) 的情况,距离跨越损失与采样间隔的关系。[1]
图10.14 对于加权以实现旁瓣电平 \(\boldsymbol{G}_{\boldsymbol{s}}\) 的脉冲串,滤波器跨越损失与检测概率的关系。[1]
10.2.6 杂波可探测性因子损耗¶
在第3章中,已显示杂波贡献的干扰谱密度 \(C_0\) 需要调整后与白高斯噪声密度 \(N_0\) 相加,形成总干扰密度。下面讨论的两个因子用于计算调整中所用的杂波可探测性因子 \(D_{xc}\)。
10.2.6.1 杂波相关损失 \(L_{c c}\)¶
输入杂波由其相关时间 \(t_{c}\) 描述,如式 (3.6) 所示,由此可以计算用于积分的独立杂波样本数 \(n_{c}\)。杂波相关损失给出为:
例如,如果杂波在整个积分时间内保持相关,则有效杂波谱密度的上调量等于在热噪声下可获得的积分增益。
10.2.6.2 杂波分布损失 \(L_{c d}\)¶
在近区之外观测到的陆地杂波(见图 9.1)呈现出比 Rayleigh 分布更宽的幅度分布,通常可用 Weibull 或对数正态模型描述。其结果要么是当杂波峰值超过为平均值相同的 Rayleigh 杂波设定的阈值时,误警率增加,要么是阈值提高导致目标检测概率降低。海杂波在高分辨率雷达低掠射角下也趋向于 Weibull 或其他扩展分布。
通常使用基于 Rayleigh 分布干扰假设的距离单元平均 CFAR 检测器(图 10.9)。当参考单元数量足够大时,其将归一化到单位噪声功率的阈值功率设定为:
其中 \(y=\log \left(1 / P_{f a}\right)\)。归一化为尺度功率 \(\alpha=1\) 的 Weibull 概率密度函数 (9.23) 为:
其中 \(x\) 为功率,\(a_{w}\) 为 Weibull 展宽参数,取值范围 \(1 \leq a_{w} \leq 5\)。指数功率分布(Rayleigh 电压)对应 \(a_{w}=1\)。对于 \(a_{w}>1\) 的 Weibull 杂波,相对于 (10.44) 中给出的 \(p_{\text {th}}\),阈值上升了 \(\Gamma\left(1+a_{w}\right)=a_{w}\) 倍,这表示平均杂波功率与假设为 1 的尺度参数 \(\alpha\) 之比。然而,当 \(a_{w}>1\) 时,\(p_{t h}\) 的增加不足以维持预定的误警概率 \(P_{f a w}\),其为:
当根据平均杂波功率在单元平均 CFAR 检测器中为 Rayleigh 分布 (\(a_{w}=1\)) 调整检测阈值时,误警率增加如图 10.15 所示。
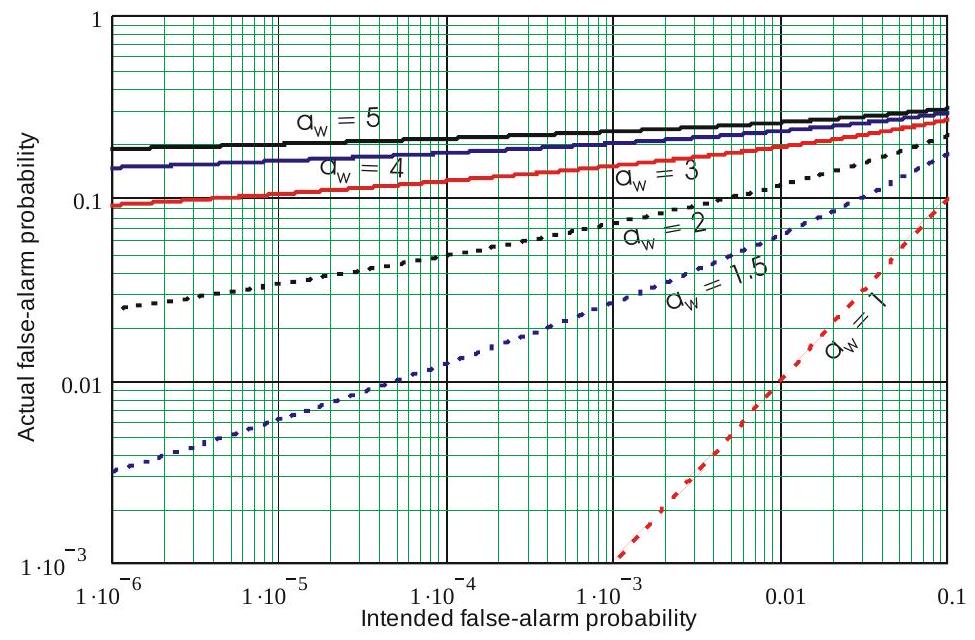
图 10.15 按预定误警概率实现的误警概率随 Weibull 杂波展宽参数变化的函数。
例如,如果预定 \(P_{f a}=10^{-4}\),则 \(a_{w}=1.5\) 时的实际 \(P_{\text {faw }}\) 增加到 0.013,\(a_{w}=2\) 时增加到 0.05。在包含 \(10^{5}\) 分辨单元的陆地搜索区域中,后一种情况下会产生 5,000 个陆地杂波误警。虽然人工观察者可能能够忽略这些误警并在显示器相对清晰的区域检测目标,但在任何使用电子检测的系统中,有效控制误警的措施都是必不可少的。
许多雷达在使用 MTI 时的方法是,在消除器前加上限幅器,将输入限制在高于噪声的水平(等于 MTI 改进因子)。这样,Weibull 或对数正态杂波的高峰值被 MTI 抑制,但代价是频谱扩展,显著降低可用改进因子,通常降至约 20 dB [20]。此外,与这些峰值重叠的信号也被限幅抑制。误警概率得以控制,但在强杂波区域的检测概率降低。在大多数情况下,性能仍然可接受,因为在杂波峰值之间移动的目标,即使在改进因子降低的情况下,也能提供杂波间可见性 [21]。
另一种可能的措施是使用两参数 CFAR [22]。在该系统中,参考单元中的样本用于估计杂波的均值和方差,并用均值乘以常数与方差相乘来设定阈值。当两参数 CFAR 检测器用于非 Rayleigh 杂波阈值调整时,Weibull 分布杂波的杂波分布损失 (3.8) 如图 10.16 所示。
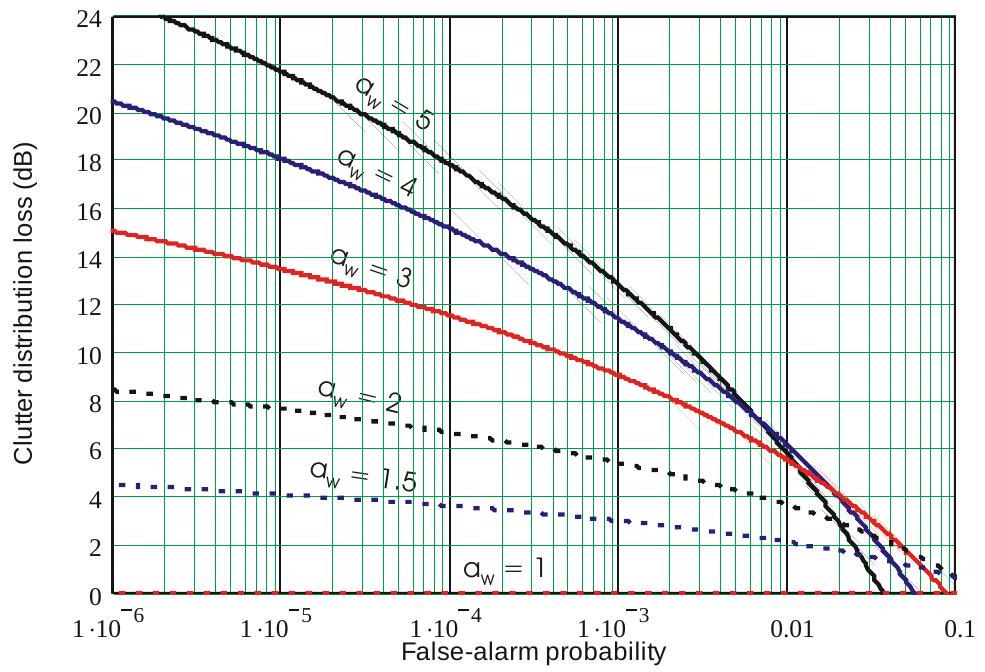
图 10.16 两参数 CFAR 检测器的杂波分布损失 \(L_{c d}\),随误警概率及不同 Weibull 杂波展宽参数变化。
对于对数正态杂波模型,可以通过在 (10.46) 或图 10.16 中使用等效 Weibull 展宽来近似表示:
其中 \(\sigma_{y}\) 为对数正态分布的 dB 标准差。图 9.4 中将 \(a_{w}\) 和 \(\sigma_{y}\) 建模为杂波传播因子 \(F_{c}\) 的函数。
图 10.16 显示了两参数 CFAR 检测器的杂波分布损失。显然,当 \(a_{w}>1\) 时,使用该方法将在相关区域引入较大的损失。
10.2.6.3 杂波地图损失 \(L_{\text {map}}\)¶
杂波地图是一种替代限幅或两参数 CFAR 的方法,用于减少第 9.6.5 节讨论的杂波峰值产生的误警。杂波地图基于连续多次搜索扫描中每个地图分辨单元的长期平均值设定阈值。它对距离单元平均 CFAR 检测器相对不敏感的离散杂波源特别有效。
杂波地图的特征不是输出 SNR 的损失(如两参数 CFAR 检测器在所有分辨单元上引入的损失),而是在包含显著杂波的地图单元中检测概率的降低。应用式 (3.2) 和 (3.10),MTI 或其他多普勒处理提供的杂波改进因子 \(I_{m}\) 将平均干扰噪声比降低为:
该近似假设多普勒处理器的输出残差是不相关的(\(L_{c d} \approx 1\))。
理想化杂波地图的性能(每个地图单元对应一个雷达分辨单元)可以通过假设地图单元内信号增益与 \(I_{0}/N_{0}\) 成反比进行建模:
其中 \(c\) 为输出杂波噪声比。只有当输入杂波能量比 \(C_{0}/N_{0}\) 接近或超过 \(I_{m}\) 时,地图单元的检测性能才会下降,而其他地图单元保持针对热噪声达到的检测性能。
地图上的平均检测概率对于 Case 1 目标可表示为:
其中 \(s\) 为信噪比,\(P(x)\) 为由 (9.23) 给出的 Weibull 分布杂波功率的概率密度函数。通过根求解方法可以确定达到所需 \(P_{d a v}\) 所需的 \(s\) 值,杂波地图损失 \(L_{\text {map}}\) 为该值与在不存在可变增益 \(G\) 时实现相同 \(P_{d}\) 所需的 \(D_{1}\) 之比:
图 10.17 显示了杂波地图损失随不同杂波环境下 Case 1 目标所需检测概率的变化。例如,假设 \(I_{m}=40 \mathrm{~dB}\),平均输入杂波噪声比为 \(C_{0}/N_{0}=+30\) dB,得到 \(c-10 \mathrm{~dB}=0.1\)。图 10.17 中的虚线曲线表明,对于 Rayleigh 杂波(\(a_{w}=1\)),可在地图损失仅 0.41 dB 下实现 \(P_{d a v}=80\%\),\(a_{w}=3\) 时损失升至 1.6 dB,\(a_{w}=5\) 时升至 3.8 dB。检测概率为 90% 时,Rayleigh 杂波的地图损失仅 0.42 dB,而 \(a_{w}=3\) 时为 1.9 dB,\(a_{w}=5\) 时约为 7 dB。这些损失远小于其他误警控制方法。该地图还有两个优点:支持 MTI 或多普勒滤波前的所有电路线性工作,使这些电路能够达到理论改进因子(见第 9.6 节);在用于选择 MTI 或常规视频处理时,它允许在无杂波单元中检测零径向速度目标,因为可以根据每个单元的实际杂波水平选择处理路径。
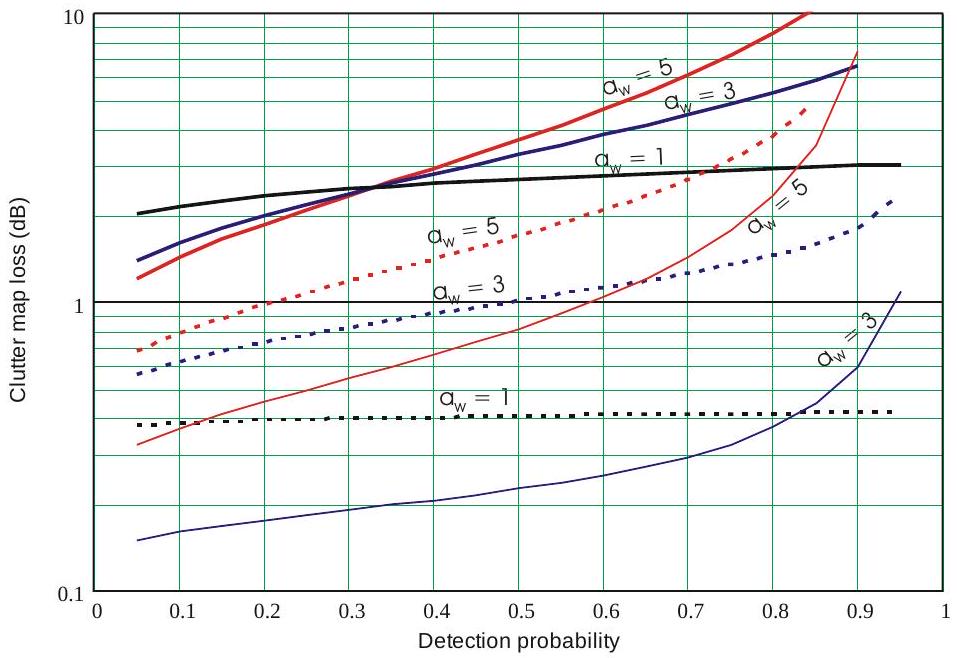
图 10.17 杂波地图损失随平均输出杂波噪声比 \(z\) 的变化,对于不同 Weibull 杂波展宽参数以及平均输出杂波噪声比 1.0(实线)、0.1(虚线)和 0.01(浅实线)。
10.3 视觉检测中的损失¶
基于显示器的操作员检测是纯模拟过程,尽管显示的信息可以被数字重构,并以高刷新率传送到显示器,而不依赖荧光粉保持显示图像。然而,无论显示刷新方式如何,当检测阈值为人为而非电子时,下列因素仍然适用。
10.3.1 能见度因子的损失¶
PPI 显示器的能见度因子 \(V_{0(50)}\) 在第 4.6 节中讨论,并在图 4.13 中绘制了 \(P_{d}=50\%\) 时,作为每个波束宽度与目标交换脉冲数 \(n\) 的函数,在“最佳观察条件”下。用于开发 \(V_{0}\) 的测试信号幅度恒定。
表 10.5 给出了 \(V_{0(50)}\) 与电子检测的 \(D_{0(50)}\) 的比较,针对 \(n=1\) 和 \(n=10\),以及误警概率 \(10^{-4}\) 和 \(10^{-6}\),因为视觉检测过程可能在该范围内提供性能。
表 10.5 可视检测与电子检测比较,\(\boldsymbol{P}_{\boldsymbol{d}}=0.5\)
| \(n\) | \(P_{f a}\) | \(D_{0}(\mathrm{~dB})\) | \(V_{0}(\mathrm{~dB})\) | 视觉损失 \((\mathrm{dB})\) |
|---|---|---|---|---|
| 1 | \(10^{-4}\) | +9.4 | +13.2 | 3.8 |
| \(10^{-6}\) | +11.2 | 2.0 | ||
| 10 | \(10^{-4}\) | +2.2 | 2.0 | |
| \(10^{-6}\) | +3.7 | +4.2 | 0.5 |
注意:视觉检测的误警概率未进行测量。
四个列出的情况的平均视觉检测损失为 2.1 dB。如果视觉过程的 \(P_{f a}\) 为 \(10^{-4}\),则损失为 2.9 dB;若为 \(10^{-6}\),则为 1.3 dB。目前似乎没有数据可以判断哪个估计更接近实际情况。
10.3.2 显示器上的折叠损失¶
中程监视雷达的典型 PPI 显示器呈现脉冲宽度约 \(\approx 3 \mu\)s,显示范围可达 300 km,对应约 2000 \(\mu\)s 的延迟。显示器的半径对应 670 个距离单元。二战期间使用的 PPI 显示器在半径方向上大约有 200 个可分辨点,因此折叠比 \(\rho \approx 3\)。虽然波束宽度通常比全程 PPI 上的角分辨率宽,但中短程目标也会出现角向折叠。对于更短的脉冲,折叠比增加,而人眼的有限分辨率可能进一步增加折叠。这些损失至少部分解释了能见度因子中的额外损失。
10.3.3 带宽修正因子 \(\boldsymbol{C}_{\boldsymbol{b}}\)¶
带宽修正因子,由式 (1.17) 表示,用于修正因偏离最佳 IF 带宽 \(B_{n}=1.2 / \tau\) 导致的目标可见性损失。在该值附近的较宽区域内,能见度因子仍接近最佳带宽下的值,其比电子阈值检测值高约 \(1.3-2.9 \mathrm{~dB}\)。
10.3.4 操作员损失 \(\boldsymbol{L}_{\boldsymbol{o}}\)¶
在操作系统中,实际检测范围与预期范围的差异常被归因于定义不明确的操作员损失。Blake [9, p. 370] 表示:
实际上,操作员损失往往成为一个任意因子,用于解释计算机预测与雷达实际观测性能之间的差异;在某些情况下,这可能是合理的解释,而在其他情况下,它可能被误用以掩盖雷达实际性能低于计算预测的原因。无论如何,这一概念过于模糊,不适用于评估特定雷达设计价值或其他工程用途的测距计算。
本章列出的众多损失,即使在尝试生成完整损失预算时仍存在不确定性,更可能解释了测试中观察到的性能降低。
操作员的性能确实可能受物理和心理因素影响,相对于用于描述最佳条件下预期性能的 \(V_{0}\) 曲线可能降低。在某些时间段,观察任务的干扰或操作员离开显示位置可能使检测概率降为零。然而,除了与 \(D_{0}\) 相比 \(V_{0}\) 的几 dB 的额外损失外,在雷达性能分析中应避免使用操作员损失。
10.4 损失因素总结¶
本章列出了在雷达方程中必须以某种形式纳入的损失,以提供准确的性能预测。其中一些在方程中被明确指出,而其他一些则嵌入在其他项中。有些损失在任何操作条件和期望性能下都是常数,而另一些则依赖于环境以及目标相对于雷达(以及电子扫描阵列面方向)的距离和角度位置。还有一些是期望检测概率的函数,当 \(P_{d} \rightarrow 1\) 时会急剧增加。
本章提供了大多数损失的计算方法,并给出了典型值的曲线。在其他情况下,需要分析雷达及其信号处理器的具体设计细节,这超出了本章的一般讨论范围。尽管损失评估需要考虑的因素众多,但希望所提供的材料能够有助于提高雷达探测距离性能分析的准确性和一致性。
在现代软件控制雷达系统的分析、设计和运行中,准确考虑系统损失随搜索和目标获取策略的变化非常重要。例如,通过减小波束位置间距可以降低波束形状损失,但代价是需要分配更多的发射能量和雷达时间来搜索特定扇区。重复扫描体积、每次扫描的 \(P_{d}\) 较低且波束间距较大,可能比进行一次高 \(P_{d}\) 扫描所需的总能量和时间更少,尤其是针对波动目标。最优策略需要在第 5 章讨论的波束形状损失与本章讨论的统计损失之间进行仔细平衡。通过对距离-多普勒空间进行更密集的采样以避免跨界损失,可以降低信号处理损失。与两个角坐标采样引起的波束形状损失不同,这种方法不涉及增加发射能量或搜索时间,只需更高的处理吞吐量和存储容量。随着摩尔定律降低所需数字硬件的成本,这种过采样在硬件获取、体积、重量和功耗方面的成本也随之下降。
尚未充分探索的一个领域是,在不增加能量和驻留时间的情况下,通过在发射波束周围使用多个偏置接收波束来实现角空间的过采样。在现代阵列雷达中,可以通过组合单脉冲和差分接收机输出形成偏置波束,且几乎无需增加额外硬件。此模式下需要为多个波束配置并行处理器,但随着阵列和发射机成本相对于接收机和处理成本的增加,这可能比安排紧密间隔的发射波束更经济。
如果雷达设计希望高效利用这些现代系统日益昂贵的能量和时间,对损失进行仔细研究是必不可少的。如果本章的详细损失分析能够为这些研究提供基础,则本书的一个目标也将实现。
References¶
[1] Barton, D. K., Radar System Analysis and Modeling, Norwood, MA: Artech House, 2005. [2] Saad, T. S. and R. C. Hansen, (eds.), Microwave Engineers' Handbook, Dedham, MA: Artech House, 1971. [3] Marcum, J. I., "A Statistical Theory of Target Detection by Pulsed Radar," RAND Corp. Research Memo RM-754, December 1, 1947. Reprinted: IRE Trans. on Information Theory, Vol. IT-6, No. 2, April 1960, pp. 59-144; Detection and Estimation, (S. S. Haykin, ed.), Stroudsberg, PA: Dowden, Hutchinson and Ross, 1976, pp. 57-121. [4] Hansen, R. C., Phased Array Antennas, New York: John Wiley \& Sons, 1998. [5] Barton, D. K. and H. R. Ward, Handbook of Radar Measurement, Englewood Cliffs, NJ: Prentice-Hall, 1968; Dedham, MA: Artech House, 1984. [6] Blevis, B. C., "Losses Due to Rain on Radomes and Antenna Reflecting Surfaces," IEEE Trans. on Antennas and Propagation, Vol. 13, No. 1, January 1965, pp. 175-176. [7] Ruze, J., "More on Wet Radomes," IEEE Trans. on Antennas and Propagation, Vol. 13, No. 5, September 1965, pp. 823-824. [8] Barton, D. K., "Simple Procedures for Radar Detection Calculations," IEEE Trans. on Aerospace and Electronic Systems, Vol. AES-5, No. 5, September 1969, pp. 837-846. Reprinted: Radars, Vol. 2, The Radar Equation, (D. K. Barton, ed.), Dedham, MA: Artech House, 1974, pp. 113-122. [9] Blake, L. V., Radar Range-Performance Analysis, Lexington, MA: D. C. Heath, 1980; Dedham, MA: Artech House, 1986. [10] Haeff, A. V., "Minimum Detectable Radar Signal and Its Dependence Upon Parameters of Radar Systems," Proc. IRE, Vol. 34, No. 11, November 1946, pp. 857-861. [11] Schwartz, M., "A Coincidence Procedure for Signal Detection," IRE Trans. on Information Theory, Vol. 2, No. 4, December 1956, pp. 135-139. [12] Gregers-Hansen, V., "Constant False-Alarm Rate Processing in Search Radars," RadarPresent and Future, IEE Conf. Publ. No. 105, October 1973, pp. 325-332. [13] Blake, L. V., "The Effective Number of Pulses Per Beamwidth for a Scanning Radar," Proc. IRE, Vol. 41, No. 6, June 1953, pp. 770-774. [14] Blake, L. V., "Addendum to Pulses Per Beamwidth for Radar,"" Proc. IRE, Vol. 41, No. 12, December 1953, p. 1785. [15] Trunk, G. V., "Detection Results for Scanning Radars Employing Feedback Integration," IEEE Trans. on Aerospace and Electronic Systems, Vol. AES-6, No. 4, July 1970, pp. 522527. [16] Cantrell, B. H. and G. V Trunk, "Angular Accuracy of a Scanning Radar Employing a Two-Pole Filter, IEEE Trans. on Aerospace and Electronic Systems, Vol. AES-9, No. 5, September 1973, pp. 649-653 [with correction: November 1974, p. 878]. [17] IEEE Standard 100, The Authoritative Dictionary of IEEE Standards Terms, 7th ed., New York: IEEE Press, 2000. [18] Trunk, G. V., "Comparison of the Collapsing Losses in Linear and Square-Law Detectors," Proc IEEE, Vol. 60, No. 6, June 1972, pp. 743-744. Reprinted in Radars, Vol. 2, The Radar Equation, (D. K. Barton, ed.), Dedham, MA: Artech House, 1974, pp. 125-126. [19] Hall, W. M. and H. R. Ward, "Signal-to-Noise Loss in Moving Target Indicator," Proc. IEEE, Vol. 56, No. 2, February 1968, pp. 233-234. [20] Ward, H. R. and W. W. Shrader, "MTI Performance Degradation Caused by Limiting," IEEE Eascon-68 Record, Washington, DC, September 9-12, 1968, pp. 168-174. [21] Barton, D. K. and W. W. Shrader, "Interclutter Visibility in MTI Systems," IEEE Eascon69 Record, Washington, DC, October 27-29, 1969, pp. 294-297. [22] Sekine, M., et al., "Suppression of Weibull-Distributed Clutter Using a Cell-Averaging Log/CFAR Receiver," IEEE Trans. on Aerospace and Electronic Systems, Vol. 14, No. 5, September 1978, pp. 823-826.