动态环境下多无人机任务分配技术现状¶
Multi-UAV Task Assignment in Dynamic Environments: Current Trends and Future Directions¶
Department of Computer Science, College of Computer and Information Science, King Saud University
Alqefari, S.; Menai, M.E.B. Multi-UAV Task Assignment in Dynamic Environments: Current Trends and Future Directions. Drones 2025, 9,75. https://doi.org/10.3390/drones9010075
Abstract¶
随着无人机(UAV)技术的迅速发展,其在军事行动、灾害响应、农业监测和基础设施巡检等多个领域的应用发生了深刻变革。部署多架无人机协同作业在覆盖范围、冗余性和操作效率方面具有显著优势。然而,随着无人机任务日益复杂且运行于动态环境中,任务分配问题也变得愈发具有挑战性。多无人机动态任务分配对优化任务成功率至关重要,它涉及在实时情况下将任务分配给无人机,并适应突发变化,例如任务的突然出现、无人机故障和任务需求的变化。
本文的一个关键贡献是对2013年至2024年间多无人机系统中动态任务分配的最新解决方案进行了全面研究。同时,本文提出了一个比较框架,用以根据应变能力(responsiveness)、鲁棒性(robustness)和可扩展性(scalability)等指标,评估算法在应对现实世界动态条件时的表现。
我们的分析揭示了三种主要方法——基于市场(market-based)、智能优化(intelligent optimization)和基于聚类(clustering-based)——在性能上的不同优势与局限性。基于市场的方法在分布式协调和实时适应性方面表现出色,但在通信开销方面面临挑战。智能优化方法(包括进化算法和群体智能)在复杂场景中具有高度灵活性和性能表现,但通常需要较高的计算资源。基于聚类的方法通过地理分组任务分配提升了效率并减少了重叠,但在应对动态环境变化方面适应性较差。
通过识别这些方法的优势、局限性以及新兴趋势,本文不仅提供了详细的比较分析,也揭示了关键的研究空白。具体而言,文章强调了以下研究需求:能够高效处理大规模无人机编队的可扩展算法、在面对突发任务变化和无人机故障时具备鲁棒性的解决方案、以及能在能量效率与任务完成度等竞争目标间实现平衡的多目标优化框架。
这些见解为未来研究提供了方向,也为在复杂环境下开发具备弹性和高效性的多无人机动态任务分配策略提供了宝贵的资源。
关键词:多无人机系统;动态任务分配;混合算法;无人机聚类技术;实时无人机协同
1. 引言¶
在机器人领域中,以协作方式部署一组机器人以完成一组任务是一个关键的研究课题 [1-3]。这类机器人群体被称为多机器人系统(Multi-Robot Systems, MRSs),其利用机器人间的协同行为,使得对单个机器人而言过于耗时且困难的复杂任务变得可行并可达成 [2,4]。在多机器人系统中,最具挑战性的问题之一是多机器人任务分配(Multi-Robot Task Allocation, MRTA)问题。该问题关注如何在考虑一系列约束条件的前提下,将一组机器人最优地分配给一组任务,从而优化预设目标与整体性能 [5]。
在自主智能系统中,无人机(UAV)技术的发展与部署是 21 世纪迄今为止最重要的进展之一,并在科学研究中引起了广泛关注 [6]。此外,它还显著影响了多个行业,包括侦察 [7]、灾害管理 [8]、通信辅助 [9]、监视 [10] 和自主勘探 [11]。与能力有限的单无人机系统相比,由多架无人机构成、以协作方式完成复杂任务的多无人机系统由于其优势而受到广泛关注,这些优势包括:任务在多架无人机间协同分配、不同无人机能力的互补性、更强的对单点故障的容错能力,以及更高的可扩展性以应对大型问题 [12,13]。因此,多无人机系统通常被用于在复杂环境中执行复杂任务。
多无人机任务分配问题是 MRTA 问题的一种形式,它可定义为在满足预定义约束条件的前提下,为具备执行一组任务能力的多架无人机寻找最优的任务分配方案 [14-17]。根据环境的确定性,该问题可分为静态任务分配与动态任务分配两类。静态任务分配假设无人机和任务的数量固定,且在分配开始前,其状态和位置是已知的。而在动态任务分配中,环境持续变化,可能在分配过程中突然出现新任务,或已有无人机在执行中失败 [7]。这种环境的不可预测性要求算法能够快速适应变化、重新分配任务,并在面临中断时确保任务成功。该问题的复杂性还在于需要在资源分配优化、通信约束管理、系统鲁棒性保障和整个无人机队列效率维持之间取得平衡。这使得动态任务分配问题在多无人机系统在现实世界中的成功部署中成为技术上的关键挑战 [18]。该问题属于组合优化问题,已知为 NP-难问题,随着问题规模的增加,获得全局最优解的计算成本也迅速上升 [7,19]。
本文聚焦于在执行过程中可能随时出现不确定事件的动态环境下,多无人机任务分配问题的最新解决方案。在过去十年中,研究人员提出了多种解决方案,旨在应对这些挑战,提升系统的性能、鲁棒性与可扩展性,并适应不同的操作环境。我们回顾了 2013 年至 2024 年间的相关研究,分析这些解决方案的优势与劣势,以识别主流趋势、揭示研究空白,并提出该快速发展领域中未来的研究方向。
本文结构如下:第2节回顾了多无人机任务分配问题的既有综述,并指出本文综述的优势;第3节介绍了多无人机任务分配问题,详细说明其挑战与重要性,并给出该问题的数学表述;第4节和第5节分别回顾了解决该问题的主要方法类别——基于市场、基于优化和基于聚类的算法,讨论各类方法的特点、性能及其在动态任务分配中的适用性;最后,第6节总结了本文的主要发现,并提出未来可能的研究方向。
2. 多机器人与多无人机任务分配既有综述的对比分析¶
此前已有若干综述与综述性论文探讨了多机器人系统与多无人机系统中的任务分配问题,为各种算法与方法提供了有价值的见解。表 1 总结了这些研究的研究范围、优势、局限性,并说明了本文相较于它们所带来的附加价值。
表 1. 现有综述的对比及本文贡献概览。
| 综述 | 研究范围 | 优势 | 局限性 | 本文的附加价值 |
|---|---|---|---|---|
| Song 等 [20] | 多无人机系统中的任务规划,涵盖任务分配与路径规划。 | 对任务分配方法(如数学规划、神经网络、启发式算法)进行广泛概述。 | 对动态环境关注较少;缺乏可扩展性与通信约束策略。 | 聚焦动态环境,解决实时适应性、可扩展性和鲁棒通信问题。 |
| Nunes 等 [21] | 多机器人任务分配(MRTA)的分类法,强调时间与顺序约束。 | 提供基于机器人与任务特性的详尽分类法。 | 缺乏针对 UAV 的聚焦;未探讨动态重分配、无人机约束或通信限制。 | 提供多无人机系统中可扩展性、适应性与动态重分配的 UAV 特定见解。 |
| Peng 等 [22] | 面向地面作战的 UAV 群动态任务分配。 | 深入探讨市场机制与智能优化算法。 | 对可扩展性、通信约束以及算法在多变动态条件下的表现分析不足。 | 全面比较各类算法在动态与对抗环境下的性能。 |
| Seenu 等 [23] | 多机器人系统中的动态任务分配策略。 | 将策略分为市场机制、优化方法、行为驱动与聚类方法。 | 混合方法、可扩展性与在不同环境不确定性下的表现分析有限。 | 探讨混合方法、多目标优化与算法在动态环境下的鲁棒性。 |
| Poudel 等 [24] | 动态环境下 UAV 网络中的任务分配策略。 | 强调实时决策与集中式、分布式、生物启发与融合算法的分类。 | 性能对比有限;对新兴算法与 UAV 特有约束关注不足。 | 提供算法的全面对比分析、新兴趋势与 UAV 特有操作约束的探讨。 |
相较于已有工作的优势:
本文相较于已有综述,在多个关键方面提供了更聚焦且全面的分析。与以往多数聚焦于一般多机器人系统(MRS)或不特指动态任务分配的多无人机系统的研究不同,本文专注于动态环境中所面临的独特挑战,在这些环境中任务与条件可能出现不可预测的变化。
对动态情境的深入探讨是本文的重要贡献,文章详细分析了各类任务分配算法如何应对突发事件,例如任务的突然出现、无人机失效或任务参数的变化——这些方面在以往研究中往往未被充分探讨。此外,本文对用于动态任务分配的解决方案进行了详尽分类与分析,包括基于市场机制、智能优化方法与聚类算法。表 1 中对比了本文与以往综述的不同,突出其贡献与优势。
另一个显著优势是本文对动态任务重分配的关注,突出了不同算法在检测动态事件后如何实现任务的持续重分配与重排序,这一方面对于在动态环境中保持系统鲁棒性至关重要,而在其他研究中却往往被忽略。此外,本文还对算法在不同动态条件下的表现进行了广泛的对比分析,提供了其性能与权衡的宝贵见解,有助于研究人员与工程实践者在选择或开发任务分配策略时做出明智决策。
本文还识别出当前的新兴趋势与研究空白,提供了前瞻性观点,鼓励创新并为未来研究指明方向,尤其是在动态任务分配中的多目标优化问题上,涉及如何在最小化能耗与最大化任务覆盖等竞争目标间实现平衡——这是以往综述所欠缺的部分。最后,关于算法在动态环境下的鲁棒性与可扩展性探讨,为其在实际应用中的适用性提供了关键参考,使得本文成为推进多无人机动态任务分配研究与实践的综合性资源。
3. 问题定义¶
多无人机动态任务分配问题可概括表述如下:给定一组具有有限载荷能力的 \(N\) 架无人机 \(\left\{U_{1}, U_{2}, U_{3}, \ldots, U_{N}\right\}\),以及一组任务 \(\left\{T_{1}, T_{2}, T_{3}, \ldots, T_{M}\right\}\),其中 \(M > N\),且环境具有可变性。该问题的常见目标是在满足预设约束的前提下,寻找一种将无人机分配给任务的方案,以最大化效益(Benefit)(例如完成任务数、无人机吞吐量或任务奖励),并最小化代价(Cost)(例如飞行距离、等待时间或能耗)。此外,当任务突然出现时,原有分配需进行动态调整,无人机可自主适应变化。
该问题的数学建模如下:
约束条件如下:
上述目标函数及约束说明如下:\(C_{1}\) 表示 \(X_{i,j}\) 是一个二值变量,若无人机 \(U_{i}\) 被分配执行任务 \(T_{j}\),则其值为 1,否则为 0;\(C_{2}\) 表示每架无人机最多可执行 \(L_{i}\) 个任务;\(C_{3}\) 保证每个任务至多由一架无人机执行;\(C_{4}\) 表示任务 \(T_{j}\) 必须在其时间窗 \([t_{s,j}, t_{e,j}]\) 内完成。
上述建模为通用形式,广泛用于多机器人与多无人机系统中的优化问题。其结构主要为概念框架,尽管未直接来源于具体文献,但类似建模可在 [25,26] 等基础研究中找到其理论依据。
示例¶
为展示所提出数学模型的应用,考虑一个包含三架无人机 \(\left(U_{1}, U_{2}, U_{3}\right)\) 和五个任务 \(\left(T_{1}, T_{2}, T_{3}, T_{4}, T_{5}\right)\) 的场景。目标是在满足模型约束条件的前提下,最大化整体效益,最小化总代价。
- 场景设定
无人机 \(U_{i}\) 被分配至任务 \(T_{j}\) 所带来的效益定义为:
其中 \(\operatorname{Reward}\left(T_{j}\right)\) 表示完成任务 \(T_{j}\) 的价值。
代价则为 \(U_{i}\) 与任务 \(T_{j}\) 之间的距离:
- 参数设定
任务奖励值(\(T_{1}, T_{2}, T_{3}, T_{4}, T_{5}\))为:[50, 40, 60, 30, 20]。
无人机到各任务的距离(单位为任意单位)如下表:
| \(T_{1}\) | \(T_{2}\) | \(T_{3}\) | \(T_{4}\) | \(T_{5}\) | |
|---|---|---|---|---|---|
| \(U_{1}\) | 10 | 15 | 20 | 25 | 30 |
| \(U_{2}\) | 20 | 10 | 25 | 15 | 35 |
| \(U_{3}\) | 30 | 25 | 15 | 10 | 20 |
每架无人机最多可执行任务数:\(L=2\)。
- 优化计算
根据模型中的目标函数:
约束条件包括:每架无人机最多执行 2 项任务:\(\sum_{j} X_{i, j} \leq 2\);每个任务只能被一架无人机执行:\(\sum_{i} X_{i, j}=1\)。
- 结果
任务分配结果为:\(U_{1}:\left(T_{1}, T_{2}\right), U_{2}:\left(T_{4}\right), U_{3}:\left(T_{3}, T_{5}\right)\)
计算得到的总距离如下:
总代价(距离):\(25+15+35=75\)。
总效益:\(50+40+30+60+20=200\)。
下图展示了任务与无人机的分配结果,显示了任务如何基于目标函数被分配至各无人机。
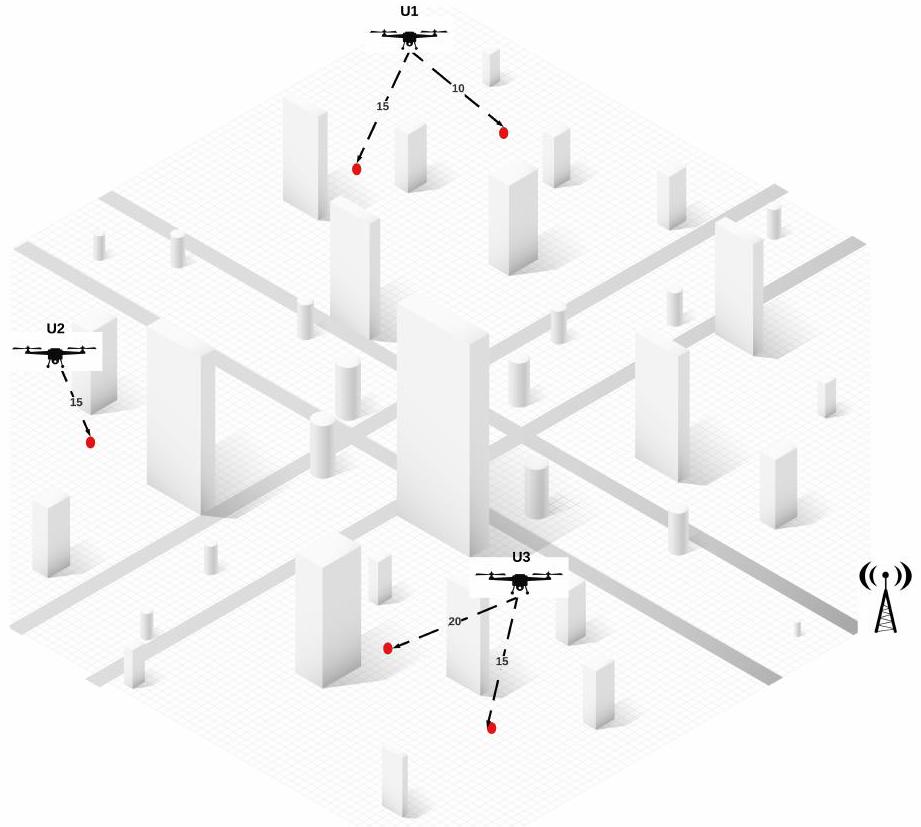
图 1. 示例中任务分配结果示意图。
4. 多无人机动态任务分配解决方案¶
动态任务分配问题是一个NP难的组合优化问题[7,22,27];因此,找到一个高效的解决方案是具有挑战性的。许多研究者已经研究了多无人机动态任务分配问题,并提供了多种解决方案。本综述涵盖了2013年至2024年间关于多无人机在动态环境中任务分配的文献研究,并根据最常见的广泛分类——基于市场、基于优化和基于聚类的解决方案进行呈现。
为了系统地比较这些研究,文中呈现了比较表格,重点关注解决方案的特点,概述了不同算法如何管理任务分配,包括它们的控制范式、无人机参与、重新分配策略、动态事件处理和通信结构。这些表格将控制范式分类为集中式、分布式或混合式,反映了成功完成任务的协调方法。无人机参与则指示所有无人机、没有无人机或部分无人机是否参与动态事件后的任务重新分配。重新分配策略分为无重新分配、部分重新分配或完全重新分配,取决于如何调整先前分配的任务以适应新的事件。通信拓扑描述了无人机交互的结构和协议,重点说明其是否被明确规定。可扩展性将数据集的大小分类为小(1-10任务)、中(11-100任务)或大(100+任务)。鲁棒性突出显示了算法能够处理的动态事件,而响应性则评估了解决方案在考虑时间因素时的表现,无论是作为目标还是性能度量。时间被分类为计算时间(决策时间)、执行时间(任务完成时间)、等待时间(启动前的延迟)或收敛时间(变更后的稳定时间)。如果未考虑时间,则标记为“未考虑时间”。这些比较提供了对算法在处理各种数据集大小、动态事件和基于时间的性能度量方面能力的洞察。
图2展示了根据其类别对多无人机动态任务分配解决方案的分类。

图2. 多无人机动态任务分配解决方案分类 [6,7,18,19,27-68]。
4.1. 基于市场的算法¶
基于市场的算法是解决多无人机任务分配问题最常用的方法,因为它们的分布式行为适用于多无人机系统的分布式结构。这种方法的灵感来自于市场交易拍卖的概念,提供了一个通信机制,使代理/无人机能够基于交易规则协调信息交换[69,70]。在多无人机系统中,拍卖过程包括一组无人机,根据它们的能力竞标任务。竞标的无人机彼此谈判,直到达成一致,选择最高出价的无人机来执行任务,其中竞标是基于优化预定义的目标函数来计算的[71]。基于市场机制的常见方法主要包括拍卖算法和合同网协议(CNP)。拍卖算法[72]通过模拟现实中的拍卖过程将无人机分配给任务,这使得无人机能够竞标任务并谈判,直到一个出价最高的无人机被分配任务。接下来的部分将介绍在动态环境中处理多无人机任务分配问题的不同基于市场的算法。
4.1.1. 基于共识的捆绑算法(CBBA)¶
由Choi [73] 提出的CBBA被认为是一种多代理任务分配拍卖算法。CBBA有两个阶段:任务包含阶段,使用贪心算法在每个无人机中构建任务捆绑,和共识阶段,解决它们之间的冲突。不同的研究论文扩展了CBBA,以解决多无人机动态任务分配问题。Fu等人[28]提出了一种任务和资源动态分配算法,扩展了CBBA框架,使用任务序列机制。目标是通过使具有重叠空闲期的无人机竞标并协商冲突-free的任务分配,将新任务插入到空闲期而不干扰现有分配,从而最小化无人机的路径长度并最大化总任务奖励。在涉及14个无人机、4个原始任务和2个新任务的仿真中,该方法有效地最小化了无人机路径长度,最大化了总任务奖励,并以分布式方式高效地重新分配任务和资源。与基准CBBA相比,所提出的解决方案还减少了计算时间和通信开销。
Zhang等人[29]扩展了CBBA框架,增加了部分重新分配和异步任务分配,以应对实时挑战,最小化无人机飞行距离和通信负载。该算法释放低优先级任务进行重新分配,确保有效的资源分配。在涉及8个无人机、32个原始任务和4个新任务的仿真中,减少了任务完成时间、通信步骤和计算时间,与标准CBBA相比,异步机制在实时表现中减少了网络流量,平滑地整合新任务而没有重大延迟。
Buckman等人[30]提出了带部分重新规划的CBBA(CBBA-PR),通过允许一部分无人机重新分配低优先级任务以及新发现的任务,最大化时间折扣奖励,以减少通信回合和运行时间。该算法在8个无人机执行80个原始任务和8个新任务时进行了测试。它比完全重置策略收敛更快,同时保持比不重置策略更高的解决方案质量。CBBA-PR方法最小化了对正在进行的任务的干扰,在动态环境中平衡了快速响应时间和任务协调。
Chen等人[27]提出了带有局部重新规划的CBBA(CBBA-LR),重点是最大化时间折扣任务奖励,并最小化无人机与任务位置之间的距离。该算法允许具有可用资源的无人机对具有重叠时间窗口和与新任务距离最近的任务进行重新规划。这一策略最小化了涉及无人机的数量,同时快速整合新任务。在涉及25个无人机、100个原始任务和5个新任务的仿真中,CBBA-LR相比其他重置策略取得了更好的分数增量和更快的收敛速度,提供了高质量的任务重新分配,具有较低的计算复杂性和更快的响应时间。
Wang等人[31]提出了一种改进的CBBA,使用两层任务竞标机制来最大化执行的任务数量并最小化任务执行时间。它调整任务分配顺序和重新规划任务,在特定时间窗口内平滑整合新任务。经过1至18个无人机,14个原始任务和2个新任务的测试,该方法提高了任务分配效率,并确保及时完成任务。尽管它提高了性能,但该解决方案产生了较高的运行时间成本。
Wu等人[32]开发了一种基于共识算法和在线合作策略的分布式任务分配方法,旨在基于无人机轨迹和任务执行时间最大化总回报值。该方法还采用了局部链通信模式,最小化带宽需求。在涉及6个无人机、10个原始任务和7个新任务的仿真中,该算法提高了总回报值和任务成功率,同时减少了通信需求。与Prim和CBBA相比,它在不确定性下实现了更快的任务完成,并保持了更高的成功率,成功率减少了14%,而离线方法为28%。该解决方案有效地处理了新任务的出现,而无需高带宽通信。
表2比较了各种CBBA扩展的特点,突出显示了控制范式、重新分配策略和通信拓扑的差异。它重点关注使用的数据集的可扩展性、算法对动态事件的鲁棒性以及解决方案在基于时间的度量方面的响应性,为它们在动态、现实应用中的适用性提供了洞察。在扩展CBBA(基于共识的捆绑算法)用于多无人机动态任务分配的研究中,不同实现之间的优点和挑战非常明显。这些扩展的优势通常体现在提高任务分配效率和减少通信开销。例如,Fu等人[28]通过动态分配新任务而不影响预先分配的任务,实现了更高的效率,而Zhang等人[29]引入了实时部分重新分配和异步任务分配,增强了响应性。Buckman等人[30]减少了重新分配中涉及的无人机数量,最小化了通信负担和执行时间。像Chen等人[27]和Wang等人[31]提出的CBBA-LR扩展引入了处理动态任务分配事件的机制,专注于快速响应和最大化任务奖励。然而,挑战包括通信复杂性和性能一致性的权衡。一些方法虽然减少了通信,但可能导致次优的任务分配(例如部分重置),而其他优化奖励或性能的方法往往会增加运行时间,就像Wang等人[31]的工作中所见。总体而言,这些扩展展示了在实现更高效率和响应性的同时,也暴露了需要根据采用的策略管理增加的通信负荷或执行时间。
表2. 扩展共识捆绑算法(CBBA)的多无人机动态任务分配解决方案特点对比。(范式:分布式)。
| 参考文献 | 年份 | 参与的无人机 | 重新分配类型 | 通信拓扑 | 可扩展性 | 动态事件的鲁棒性 | 响应性 |
|---|---|---|---|---|---|---|---|
| [28] | 2019 | 所有 | 无重新分配 | 无 | 小 | 新任务的出现 + 现有任务的丢失 | 基于时间(计算) |
| [29] | 2020 | 所有 | 部分 | 是 | 小 | 原始任务的变动 | 基于时间(执行) |
| [30] | 2019 | 部分 | 部分 | 无 | 中 | 新任务的出现 | 基于时间(完成+计算) |
| [27] | 2022 | 部分 | 部分 | 无 | 中 | 新任务的出现 | 基于时间(等待) |
| [31] | 2022 | 所有 | 所有 | 是 | 中 | 新任务的出现 | 基于时间(等待) |
| [32] | 2018 | 所有 | 无重新分配 | 是 | 中 | 新任务的出现 | 基于时间(执行) |
4.1.2. 性能影响算法(PI)¶
Zhao等人[74]提出了一种名为性能影响(PI)算法的任务分配方法,作为CBBA算法的扩展,可以在时间限制的应用中分配任务。PI是一个分布式任务分配算法,包含两个阶段。它考虑了分配任务的成本,同时还考虑了将任务包括在内对已经分配给每个无人机的其他任务的影响。PI还在不同的论文中得到了增强,以处理多无人机动态任务分配问题。
Turner等人[33]提出了PI-MaxAss算法,作为性能影响(PI)算法的扩展,用于在严格的时间限制下最大化分配任务的数量。该算法在无人车之间转移任务分配,以为未分配的任务创建可行的时间槽,而无需重新运行整个过程。在涉及14个无人机和64个任务的仿真中,PI-MaxAss相比CBBA和PI-MinAvg算法,改进了任务分配,最多提高了20%,尽管它需要更多的迭代才能收敛。
Whitbrook等人[19]扩展了PI算法,增加了两个模块,以通过动态重新调度和改进搜索空间探索来解决局部极小值和静态结构问题,采用软最大行动选择程序。该解决方案旨在最小化服务任务的平均时间成本。在涉及16个无人机、96个原始任务和4个新任务的仿真中,与CBBA相比,任务完成时间提高了9%。重新调度模块实现了实时适应,但增加了运行时间,特别是在处理较大问题时。
Yang等人[7]提出了一种分布式重新分配框架,根据动态事件的类型确定处理策略,并包括部分重新分配算法(PRA)。PRA具有一个增量子团队形成机制,允许部分无人机响应动态任务,并具有部分释放机制,可以删除特定任务以提高重新分配成功率。此外,他们提出了一种修改后的包含阶段,以在PRA内最大化任务分配(MIP-MA),以最大化任务分配的数量。该框架旨在通过考虑任务分数和旅行时间成本来最大化总利润。在涉及8个无人机、32个原始任务和2个新任务的仿真中,PRA成功分配了85%的新任务,同时减少了通信和运行时间,和PI及CBBA算法相比,表现更高效,适应了各种动态场景,例如任务的增加和移除。
Cui等人[34]提出了一种基于时间窗的分布式分配(DATW)算法,在考虑复杂时间约束的同时最小化平均任务完成时间。该算法将时间窗约束集成到基于PI的方法中,并使用三阶段策略——任务包含、冲突解决和重新分配。通过将任务的重要性与时间窗关联,任务在有效期内提前完成,且不会增加通信负担。在涉及16个无人机和48个任务的仿真中,DATW相比E-CBBA,成功率提高了18%。该方法还改善了任务分配,尽管较大的任务集需要更多的迭代和通信以达到共识。
Qamar等人[35]提出了妥协动态PI(CDPI)算法,以最大化任务分配,并在动态搜救场景中改善任务优先级排序。CDPI集成了VIKOR方法进行多标准决策,在动态场景中,处理新任务的引入。在涉及6个无人机、12个原始任务和2个新任务的仿真中,任务分配提高了22%,任务优先级排序改善了28.57%,相较于基线PI算法。该算法还有效处理动态条件,减少任务重新分配的成本。
表3比较了各种PI扩展的特点,突出显示了控制范式、重新分配策略和通信拓扑的差异。它重点关注使用的数据集的可扩展性、算法对动态事件的鲁棒性以及解决方案在基于时间的度量方面的响应性,为它们在动态、现实应用中的适用性提供了洞察。PI算法及其扩展为多无人机动态任务分配提供了多种优势和挑战。其一个关键优点是能够处理时间敏感的应用,考虑新任务对已分配任务的影响,从而实现更高效的任务分配,正如Turner等人[33]所示,减少了执行时间并增加了分配的任务数量。Whitbrook等人[19]和Yang等人[7]进一步增强了实时重新调度和重新分配效率,减少了通信开销并提高了在动态环境中的可扩展性。然而,一些限制包括在某些场景中增加了复杂性和通信要求,例如PI-MaxAss中需要的高迭代次数,这可能导致更长的收敛时间。此外,算法专注于最大化任务分配有时会导致权衡,例如在复杂动态场景中可能导致解决方案质量的略微下降或更高的运行时间,正如Qamar等人[35]的工作所示。
表3. 扩展性能影响(PI)算法的多无人机动态任务分配解决方案特点对比。(范式:分布式;通信拓扑:无;可扩展性:中)。
| 参考文献 | 年份 | 参与的无人机 | 重新分配类型 | 动态事件的鲁棒性 | 响应性 |
|---|---|---|---|---|---|
| [33] | 2018 | 所有 | 部分 | 新任务的出现 + 原任务变动 + 添加新无人机 + 丧失无人机 | 基于时间(等待) |
| [19] | 2017 | 所有 | 部分 | 新任务的出现 | 基于时间(执行) |
| [7] | 2022 | 部分 | 部分 | 新任务的出现 + 原任务变动 | 基于时间(等待) |
| [34] | 2022 | 所有 | 无重新分配 | 原任务变动 | 基于时间(完成) |
| [35] | 2023 | 所有 | 无重新分配 | 新任务的出现 | 基于时间(执行) |
4.1.3. 合同网协议算法(CNP)¶
合同网协议(CNP),由Reid G. Smith于1980年提出[75],是一种常用于多代理系统中进行任务分配的任务共享协议。它与密封拍卖协议类似。在CNP中,一个管理代理向多个代理提出任务,然后这些代理提交竞标或提案。管理者选择其中一个提案来分配任务。此外,分配的任务如果必要,可以进一步分配给其他代理。不同的论文对CNP算法进行了增强。Qin等人[6]提出了一种基于扩展合同网协议(CNP)的分布式分组合作动态任务分配方法,用于执行多目标侦察和攻击任务的无人机蜂群,以最大化无人机奖励并最小化基于燃料消耗和飞行范围的惩罚。该方法在复杂的战斗场景中提高了实时任务表现,能够应对目标突现的情况
。在涉及11个无人机、12个原始任务和4个新任务的仿真中,该策略优于ACO,所需的计算资源和时间更少,验证了其在动态环境中的有效性。
Oh等人[36]提出了基于市场的去中心化算法,扩展了CNP,旨在通过优先考虑任务和完成时间来最大化任务分数。该算法包括两个去中心化算法,其中选举一个联盟领导人,以消除代理之间的持续同步。在涉及10个无人机、30个原始任务和2-3个新任务的仿真中,与GDAP相比,任务完成情况更好,尽管由于频繁重置,需要更多通信。修改后的GDAP通过避免一致性过程,减少了通信成本,并增强了在动态环境中的可扩展性和有效性。
Moon等人[37]提出了一种基于CNP的谈判式任务分配算法,旨在最小化无人机的旅行距离。在这种方法中,每个无人机根据最低成本选择任务,冲突通过将任务分配给最低成本的无人机来解决。经过3个无人机和10个任务的测试,该算法比MILP计算速度更快,确保了任务成功完成,适用于具有低计算成本的动态环境。
Zhang等人[38]开发了一种混合CNP,包括买卖、交换和替换合同,以优化总利润、最小化时间消耗,并平衡任务调度。在涉及3个无人机、10个任务和一个新任务的仿真中,混合CNP将重新调度时间减少到0.003秒,通过重新分配低奖励任务,将奖励从202增加到272,相较于基于基本CNP的方法。该方法在紧急情况和平台故障的动态场景中特别有效。
Wang等人[39]提出了TS-DTA算法,一种两阶段的分布式任务分配方法,旨在最小化任务完成时间和飞行时间,同时管理侦察与攻击环境中的新目标和无人机故障。在涉及8个无人机、20个原始任务和5个新任务的仿真中,TS-DTA减少了通信负担,同时在任务重新分配中取得了较高的成功率。它在新目标或无人机损坏场景中,比PSO和CNP算法提高了20%的任务分配效率。
Wu等人[40]提出了一种分层任务重新规划策略,作为CNP的适应版本,用于多个无人机编队,重点是最小化路径长度和资源使用。该方法使用快速探索随机树算法进行路径规划和任务重新分配,确保任务分配给最有能力的无人机编队,并减少了对广泛在线计算的需求,使无人机编队能够迅速适应变化并有效完成任务。在涉及10个无人机、18个原始任务和2个新任务的仿真中,分层策略通过平衡任务负载和无人机能力,减少了任务完成时间,在动态环境中提高了性能。
表4比较了各种CNP扩展的特点,突出显示了控制范式、重新分配策略和通信拓扑的差异。它重点关注使用的数据集的可扩展性、算法对动态事件的鲁棒性以及解决方案在基于时间的度量方面的响应性,为它们在动态、现实应用中的适用性提供了洞察。合同网协议(CNP)及其扩展在多无人机动态任务分配中具有显著的优缺点。一个关键优势是该算法在处理动态环境时的灵活性,允许即使在复杂场景中也能高效地分配任务,正如Qin等人[6]和Moon等人[37]的研究所示。基于联盟和分层的方法减少了计算负担,并允许实时任务重新调度,特别是在动态和不可预测的环境中。此外,张等人[38]提出的混合合同使得任务分配得以优化,同时最小化通信开销。然而,一个缺点是一些扩展,如Oh等人[36],在频繁的网络断开场景中面临挑战,在这种情况下,代理之间的持续通信变得困难。此外,在没有重新分配的情况下,当新任务出现或发生意外事件时,任务效率可能会受到限制,就像Wu等人[40]的工作所示。尽管有这些局限性,CNP及其变体在动态任务环境中提供了可扩展的解决方案,并显著提高了性能。
表4. 扩展合同网协议(CNP)算法的多无人机动态任务分配解决方案特点对比。(参与的无人机:所有)。
| 参考文献 | 年份 | 范式 | 重新分配类型 | 通信拓扑 | 可扩展性 | 动态事件的鲁棒性 | 响应性 |
|---|---|---|---|---|---|---|---|
| [6] | 2022 | 集中式/分布式 | 部分 | 是 | 中 | 新任务的出现 + 丧失无人机 | 基于时间(执行) |
| [36] | 2017 | 分布式 | 无重新分配 | 是 | 中 | 网络断开 | 基于时间(完成) |
| [37] | 2013 | 分布式 | 无重新分配 | 无 | 小 | 新任务的出现 | 基于时间(完成) |
| [38] | 2022 | 分布式 | 部分 | 无 | 小 | 新任务的出现 + 丧失无人机 | 基于时间(执行) |
| [39] | 2023 | 分布式 | 部分 | 是 | 中 | 新任务的出现 + 原任务变动 + 丧失无人机 | 基于时间(完成) |
| [40] | 2023 | 分布式 | 无重新分配 | 无 | 中 | 新任务的出现 + 原任务变动 | 基于时间(完成) |
4.1.4. 市场算法的其他扩展¶
其他文献对市场算法进行了扩展。基于分布式拍卖算法,Duan等人[18]提出了一种基于分层决策机制和集中-分布式拍卖结构的混合两阶段拍卖算法。该算法旨在最大化任务收益,最小化成本(燃料、时间和距离),并优化任务覆盖。在第一阶段,算法选择一个需要紧急执行的任务,并基于分层决策机制生成一个合理的拍卖顺序,而不是像以往方法那样使用随机顺序。然后,相关的无人机根据目标函数为该任务进行竞标,该函数考虑了任务之间的关联成本和用于平衡无人机使用的惩罚因子。该过程将重复,直到所有任务分配完成。通过对8个无人机、20个原始任务和4个新任务的仿真,混合拍卖方法通过自适应惩罚和任务覆盖因子提高了总任务收益和任务完成速度,优于CAA、CBBA和DTAP算法。
Farinelli等人[41]解决了多机器人巡逻问题,并引入了两种动态任务分配方法:DTA-Greedy和DTAP(一种基于市场的策略,使用顺序单项拍卖)。目标是最小化全局空闲时间和旅行成本。第一种方法,DTA-Greedy,通过考虑当前空闲时间并接收其他机器人任务来执行贪心的最大化决策。另一种方法受到顺序单项拍卖的启发,在分配任务时考虑到其他已分配的任务。通过8个无人机和163个任务的仿真,DTAP在减少空闲时间和实现更平稳的任务执行方面优于RAND和SEBS,并减少了冲突。DTA-Greedy虽然效果较差,但仍优于像RAND、CR和HCR等简单方法。
Li等人[42]提出了一种在线共享内存拍卖算法,旨在最大化总收益,方法是重置一些已分配的任务,并将它们与新任务一起重新拍卖,而不是完全重置现有的分配。通过对10个无人机、60个原始任务和5个新任务的仿真,在线拍卖方法比顺序拍卖获得更高的收益,并且与离线拍卖相比,拍卖回合数减少,从而加快了任务分配过程。
Wang等人[43]提出了一种基于拍卖的动态任务分配算法,应用于异构有人-无人机协作(MUAVT),重点是最大化任务成功概率,同时考虑代理能力和任务距离。未分配的任务首先根据优先级进行更新和重新排序。使用扩展的拍卖算法,代理在竞标未分配任务时,同时考虑时间和资源约束。然后,为了解决代理之间的冲突,采用基于优先级的任务协调模块。一旦成功概率超过阈值或没有可用的代理,竞标过程结束。在1个MAV、4个无人机和3个原始任务的场景中,该算法有效地响应了优先级和条件的变化,确保了即使在环境威胁下任务的成功。
Cheng等人[44]提出了一种基于拍卖的多约束任务分配算法,旨在最大化无人机奖励并最小化完成成本(包括燃料、传感器和危险因素)。关键思想是将这些约束按固定顺序排列,然后从第一层到最后一层更新成本,直到所有约束得到满足。任务奖励在所有约束解决后考虑。当任务被识别时,只有那些能够满足所有四个约束的无人机被选择来完成任务。通过30个无人机、50个任务和5个危险区域的仿真,结果表明,随着更多无人机完成任务,平均燃料成本下降。结果还显示,随着无人机数量的增加,任务成功率稳定,即使任务量增加。
Hao等人[45]提出了一种分布式-集中式动态任务分配框架,结合了分布式选举算法和集中式快速在线目标分配算法,旨在最小化多个移动目标的总跟踪成本。第一步,设计了一个分布式领导者选举算法来确定领导者,领导者作为中心节点负责获取无人机和目标的信息,并进行任务分配。其次,提出了一种快速在线目标分配算法,调度无人机跟踪移动目标。通过1200个无人机和800个任务的仿真,该框架能够在10秒内为少于1000个无人机计算解决方案。它有效地平衡了能量消耗和目标优先级,以最小化跟踪成本。
Kim等人[46]提出了一种基于资源福利的任务分配策略,使用类似拍卖的协议,旨在最大化搜索和攻击任务中的总奖励。该方法允许无人机团队通过平衡消耗速率有效管理资源,从而确保无人机的更大可用性,以适应动态情况。通过5个无人机和30个任务的仿真,福利基础的方法在不同场景中比即时任务分配提高了10%到29.3%的总奖励。
García等人[47]提出了一种简单的基于拍卖的策略,旨在扩展为分布式多子拍卖,用于处理大型多机器人团队动态任务分配的复杂性。核心目标是最小化旅行距离,并展示这种简单的拍卖框架可以使计算成本随团队规模线性增长,从而通过分层子拍卖方法,在动态条件下解决复杂的分配挑战。通过24个无人机和6个任务的仿真,拍卖时间随着团队规模的增加呈线性增长,证明了在复杂的分层设置中具有可扩展性。
Cheng等人[48]开发了NECTAR,一种基于代理的任务分配算法,使用增强的拍卖机制来最小化执行时间并最大化任务成功率。NECTAR通过协作代理基于局部状态快速响应动态任务,并确保连续的任务分配,减少了通信开销。在150个无人机的仿真中,NECTAR在大多数场景中实现了超过80%的任务成功率,优于RANDOM基准。NECTAR的更高执行时间比例表明,在无人机飞行过程中任务执行更高效。
表5比较了各种其他扩展的特点,突出显示了控制范式、重新分配策略和通信拓扑的差异。它重点关注使用的数据集的可扩展性、算法对动态事件的鲁棒性以及解决方案在基于时间的度量方面的响应性,为它们在动态、现实应用中的适用性提供了洞察。其他基于市场的算法在多无人机动态任务分配中提供了许多优点和挑战。正面来看,这些算法有效利用局部信息交换和无人机偏好,产生强健的解决方案,能够适应不确定和动态的环境。这些方法具有很高的可扩展性,能够通过重新拍卖和自适应竞标策略等机制处理越来越复杂的任务,如Li等人[42]和Wang等人[43]的工作所示,这些算法确保即使输入规模增大,任务分配仍能保持良好的质量。此外,像NECTAR[48]这样的算法,在减少通信开销的同时,获得了高任务成功率,适用于实时任务重新分配。然而,过于依赖局部通信状态可能导致解决方案的延迟,特别是在频繁网络断开或高通信负载的情况下,正如Farinelli等人[41]的研究所示。此外,尽管基于市场的方法通常减少了计算复杂性,但在任务集较大或重新分配策略复杂的情况下,可能会发生过度计算,进而减慢任务分配过程。总体而言,这些算法在效率和适应性之间取得了平衡,但在通信和计算瓶颈方面较为敏感。总的来说,基于市场的算法具有许多优点,包括通过利用局部信息交换和代理/无人机偏好实现高效解决方案、对动态环境中不确定变化的鲁棒性以及随着输入规模增大而获得良好解决方案的可扩展性。然而,基于市场的方法非常依赖局部通信状态,这可能导致获取解决方案的延迟,并可能涉及过度计算。
表5. 扩展其他基于市场的算法的多无人机动态任务分配解决方案特点对比。
| 参考文献 | 年份 | 范式 | 参与的无人机 | 重新分配类型 | 通信拓扑 | 可扩展性 | 动态事件的鲁棒性 | 响应性 |
|---|---|---|---|---|---|---|---|---|
| [18] | 2019 | 集中式/分布式 | 部分 | 无重新分配 | 无 | 中 | 新任务的出现 + 丧失无人机 | 基于时间(等待) |
| [41] | 2017 | 分布式 | 所有 | 无重新分配 | 无 | 大 | 原任务变动 | 基于时间(等待) |
| [42] | 2022 | 分布式 | 所有 | 部分 | 无 | 中 | 新任务的出现 | 基于时间(收敛) |
| [43] | 2018 | 集中式/分布式 | 所有 | 部分 | 无 | 小 | 新任务的出现 + 原任务变动 + 丧失无人机 | 未考虑时间 |
| [44] | 2016 | 分布式 | 所有 | 无重新分配 | 无 | 中 | 新任务的出现 | 基于时间(完成) |
| [45] | 2021 | 集中式/分布式 | 所有 | 无重新分配 | 无 | 大 | 新任务的出现 + 丧失无人机 | 基于时间(计算) |
| [46] | 2015 | 分布式 | 部分 | 无重新分配 | 无 | 中 | 新任务的出现 + 丧失无人机 | 未考虑时间 |
| [47] | 2013 | 集中式/分布式 | 部分 | 无重新分配 | 是 | 小 | 原任务变动 | 基于时间(计算) |
| [48] | 2020 | 集中式/分布式 | 所有 | 无重新分配 | 是 | 大 | 新任务的出现 | 基于时间(执行) |
4.2. 智能优化算法¶
智能优化算法是一类受自然现象或社会行为启发的随机搜索方法,这些算法通过数学公式来描述问题的优化过程[22]。这些算法的目标是从一组受约束的可行解中找到最优解。最优解是基于一个预定义的目标函数来选择的,该目标函数用于衡量解的质量[3]。基于优化的算法可以根据其行为分为进化算法和群体智能算法。进化算法受到生物进化过程的启发,而在任务分配问题中最常用的进化算法是遗传算法。群体智能算法则受到自然界中群体生物行为的启发,其中一组个体(候选解)结合形成群体,并通过相互交换信息来优化解决方案的质量。遗传算法(GA)[76]、蚁群优化(ACO)[77]和粒子群优化(PSO)[78]是最常用的群体智能算法。
4.2.1. 遗传算法(GA)¶
遗传算法(GA)是一种启发式算法,受自然选择过程的启发,属于进化算法(EA)的一部分。遗传算法通常应用于优化和搜索问题,通过利用生物学启发机制,如变异、交叉和选择,来产生高质量的解决方案[76]。通过回顾文献,我们发现不同的基于优化的方法已将遗传算法扩展到解决多无人机动态任务分配问题。Wu等人[49]提出了一种混合任务分配方法,使用分布式遗传算法(DGA)结合扩展的CBBA,解决动态灾难救援场景中的时间关键任务。该方法旨在最大化任务分配奖励并最小化操作时间和无人机路径。DGA优化了操作时间并增强了无人机之间的通信,使得在新任务出现时能够高效重新分配任务。当新任务出现时,选择一些无人机重新分配其当前分配的任务,并且只释放最后一个任务来处理新任务。通过对5个无人机和15个任务的仿真,结果显示该算法在质量指数评分上优于PI、HRCA和CGBA算法,相比HRCA,奖励和操作时间也更优,重新分配时间为0.1秒。
Yan等人[50]提出了一种基于遗传算法和改进的CNP算法的异构无人机协作任务分配算法,旨在最大化任务奖励并最小化无人机路径长度。该算法在响应无人机损坏或新目标时,改进了任务平衡、分配效率和动态规划。遇到无人机损坏或新目标时,首先计算每个无人机的负载率,负载率最高的无人机负责竞标目标。为了最大化无人机的整体效能,提出的算法在获得新任务时重新排列无人机的执行顺序。通过对6个无人机、20个任务和2个损坏无人机的仿真,结果显示该算法在任务分配上优于传统CNP,减少了执行时间,并将效能得分从843.41提高至1326.18,展示了在动态条件下的弹性。
Gao等人[51]提出了一种多目标框架,结合NSGA-II进行初步任务优化,并通过CNP实现实时重新分配机制,以最大化已销毁任务值并最小化损坏无人机的成本。该方法针对无人机损坏或新目标出现的动态环境,CNP的竞标系统使任务能够灵活重新分配。通过对15个无人机和100个任务的仿真,结果表明,该方法在任务重新分配速度上优于MOPSO,解决方案得分更高,CPU运行时间更短,平衡了快速响应与轻微的全局优化牺牲。
表6比较了各种其他扩展的特点,突出显示了控制范式、重新分配策略和通信拓扑的差异。它重点关注使用的数据集的可扩展性、算法对动态事件的鲁棒性以及解决方案在基于时间的度量方面的响应性,为它们在动态、现实应用中的适用性提供了洞察。针对多无人机动态任务分配的遗传算法(GA)具有显著的优势和一些局限性。其优势包括在动态环境中的适应性和高效性,因为它们可以实时优化任务分配,即使在新任务或无人机损坏等突发事件发生时也能有效应对。例如,Gao等人[51]证明了基于GA的方法比其他基准方法,如MOPSO,更快速地重新分配任务,实现了灵活和响应迅速的操作。GA能够平衡多个目标,如最小化操作时间和最大化奖励,正如Wu等人[49]的工作所示,展示了其在优化任务分配方面的多样性。然而,主要的缺点是,这些算法有时为了更快的实时解决方案而牺牲全局优化,这可能在复杂场景中无法产生最佳的整体结果。此外,Yan等人[50]的研究中显示,解决方案进化过程的计算开销可能较大,而如何在响应时间和计算效率之间找到平衡仍然是一个挑战。总体而言,尽管遗传算法在处理动态任务分配时非常强大,但它们必须仔细调优,以管理解决方案质量和计算效率之间的权衡。
表6. 扩展遗传算法(GA)的多无人机动态任务分配解决方案特点对比。(范式:分布式;可扩展性:中)。
| 参考文献 | 年份 | 参与的无人机 | 重新分配类型 | 通信拓扑 | 动态事件的鲁棒性 | 响应性 |
|---|---|---|---|---|---|---|
| [49] | 2023 | 部分 | 部分 | 是 | 新任务的出现 | 基于时间(执行) |
| [50] | 2021 | 所有 | 无重新分配 | 无 | 新任务的出现 + 丧失无人机 | 基于时间(执行) |
| [51] | 2022 | 所有 | 无重新分配 | 无 | 新任务的出现 + 丧失无人机 | 基于时间(完成) |
4.2.2. 粒子群优化算法(PSO)¶
粒子群优化(PSO)是一种计算技术,通过根据特定的质量衡量标准,迭代地优化候选解来优化问题[78]。不同的基于优化的方法已将PSO扩展到解决多无人机动态任务分配问题。Zhang等人[38]提出了一种混合A-QCDPSO算法,将改进的离散PSO与市场拍卖机制结合,旨在最大化整体收益并最小化威胁和距离成本。粒子子群根据质量动态划分,改变了算法的拓扑结构。市场拍卖机制在粒子初始化和任务协调时应用,以生成高质量的粒子。在涉及6个无人机、20个任务、2次无人机故障和3个新任务的仿真中,A-QCDPSO算法在任务执行时间和适应度方面优于QCDPSO和传统合同网方法,展示了在动态任务分配中的高效性。
Fei等人[52]提出了一种基于分治原理与光谱聚类(SC)和PSO的动态任务分配框架,旨在最小化延迟罚款和无人机的能量消耗,应用于城市货物分配。任务分配问题基于分治原理分解为多个子问题,并通过光谱聚类(SC)算法生成初步任务分配方案。然后,使用PSO算法对每个聚类中的任务进行排名,以获得最佳任务分配方案。任务分配机制会在任务中断的情况下动态调整,以保持高任务完成率并减少无人机执行成本。通过6个无人机和100个任务的仿真,结果表明,优化后的任务顺序降低了延迟并减少了能量使用。
Cao等人[53]提出了一种混合分配方法,结合增强的PSO-FSA和分布式拍卖算法,用于动态战场任务分配,目的是最小化总飞行距离,同时保持低通信复杂度。通过对9个无人机、20个任务和3个新任务的仿真,结果表明该方法比分布式拍卖算法减少了任务分配时间和通信复杂度,尽管由于谈判冲突,稳定性稍差。该方法在复杂环境中实现了鲁棒性和自治性之间的平衡。
表7比较了各种其他扩展的特点,突出显示了控制范式、重新分配策略和通信拓扑的差异。它重点关注使用的数据集的可扩展性、算法对动态事件的鲁棒性以及解决方案在基于时间的度量方面的响应性,为它们在动态、现实应用中的适用性提供了洞察。粒子群优化(PSO)算法在多无人机动态任务分配中的扩展展示了不同实现之间的优缺点。一个关键优势是其对动态环境的适应性以及有效处理实时要求的能力。例如,Zhang等人[38]提出的A-QCDPSO在优化任务分配时间和提高任务执行效率方面表现突出,在无人机故障或紧急任务场景下优于传统算法。同样,Fei等人[52]展示了PSO在减少能量消耗和保持高任务完成率方面的优势,特别是在城市货物分配任务中,展示了其在大规模复杂问题中的有效性。Cao等人[53]将PSO与分布式拍卖算法结合,在战场场景中显著减少了通信复杂度并提高了时间性能。然而,也存在缺点。一些方法的稳定性,如Cao的PSO-FSA方法,可能会因长期谈判阶段而受到影响,导致性能一致性较差。此外,某些情况下过于依赖局部优化,如Fei等人[52]的工作,可能无法保证全局最优解,特别是在与其他基准对比缺乏时。总体而言,PSO提供了高效性和可扩展性,但在稳定性问题和某些动态场景的复杂性上可能受到制约。
表7. 扩展粒子群优化算法(PSO)的多无人机动态任务分配解决方案特点对比。(重新分配类型:无重新分配;可扩展性:中)。
| 参考文献 | 年份 | 范式 | 参与的无人机 | 通信拓扑 | 动态事件的鲁棒性 | 响应性 |
|---|---|---|---|---|---|---|
| [38] | 2022 | 分布式 | 所有 | 无 | 新任务的出现 + 丧失无人机 | 基于时间(收敛) |
| [52] | 2022 | 分布式 | 无 | 无 | - | 基于时间(等待) |
| [53] | 2014 | 集中式/分布式 | 部分 | 是 | 新任务的出现 | 基于时间(完成) |
4.2.3. 人工蜂群算法(ABC)¶
人工蜂群(ABC)算法是一种优化方法,模拟了蜜蜂觅食行为,并已被有效应用于众多现实问题。ABC算法由Karaboga于2005年提出,是群体智能算法家族的一部分[79]。许多先前的研究扩展了ACO,以解决多无人机系统中的动态任务分配问题。Liu等人[54]引入了一种动态任务分配方法,使用人工蜂群(ABC)算法来最小化多智能体合作系统中的总分配成本,包括执行成本和通信成本。每只蜜蜂代表一个任务-代理组合,任务分配通过基于启发式的初始化生成。通过对10个代理和最多100个任务的仿真,结果显示,ABC在分配成本、计算时间和可扩展性方面优于GA和PSO,尤其是在复杂的高密度任务环境中,展示了其在较低计算努力下的有效性。
Liu等人[55]提出了Ex-MADDPG,一种基于MADDPG算法的增强版本,旨在最大化任务完成率并最小化任务丢失和通信开销,适用于无人机蜂群目标攻击任务。Ex-MADDPG受到蜜蜂群体动态的启发,支持大规模蜂群,其中无人机在有限的通信范围内独立识别并共享目标位置,并为不同的任务执行做出集体决策。在56个无人机和28个任务的仿真中,Ex-MADDPG在任务完成率、决策时间和通信负载方面优于MADDPG和ms-MADDPG。现实测试确认了其在动态场景中的高性能,在实时分配无人机任务方面表现优异。
表8比较了各种其他扩展的特点,突出显示了控制范式、重新分配策略和通信拓扑的差异。它重点关注使用的数据集的可扩展性、算法对动态事件的鲁棒性以及解决方案在基于时间的度量方面的响应性,为它们在动态、现实应用中的适用性提供了洞察。人工蜂群(ABC)算法在应用于多无人机动态任务分配问题时展示了许多优势和局限性。ABC算法的一个关键优势是其在处理复杂、高密度任务场景中的可扩展性和效率,如Liu等人[54]的工作所示,算法在分配成本和计算时间方面优于GA和PSO。它能够最小化总成本并适应动态环境,特别适用于大规模合作系统。此外,ABC算法在动态场景中具有鲁棒性,有效管理新任务的出现、代理的失败和任务参数的变化。然而,一个局限性是,像其他群体智能算法一样,它严重依赖于代理之间的通信,这可能会在高度动态或信息受限的环境中增加开销,正如Liu等人[55]的研究所示。受蜜蜂群体行为启发的Ex-MADDPG变体改善了大规模蜂群的可扩展性和适用性,但该方法的复杂性可能在处理更复杂的实时场景时增加通信负载。尽管存在这些挑战,ABC算法及其扩展在动态任务环境中表现出了强大的性能,特别是在最小化计算努力和实现更高任务完成率方面。
表8. 扩展人工蜂群算法(ABC)的多无人机动态任务分配解决方案特点对比。(范式:分布式,参与无人机:部分;通信拓扑:是;可扩展性:中)
| 参考文献 | 年份 | 重新分配类型 | 动态事件的鲁棒性 | 响应性 |
|---|---|---|---|---|
| [54] | 2015 | 完全 | 新任务的出现 + 代理丧失 + 任务参数变化 | 基于时间(计算) |
| [55] | 2023 | 无重新分配 | 新任务的出现 | 未考虑时间 |
4.2.4. 灰狼算法¶
灰狼优化算法(GWO)是一种启发式算法,灵感来自灰狼的领导结构和捕猎行为,由Mirjalili等人于2014年提出[80]。许多研究已将GWO应用于解决多无人机系统中的动态任务分配问题。Shi等人[56]提出了TABA方法,这是一种基于仿生算法(蚁群、蝙蝠和灰狼算法)的多无人机任务分配方法,旨在最小化计算时间、旅行时间和无人机飞行距离。该方法根据无人机和任务的数量调整任务分配,如果无人机数量少于任务数量,则最远的无人机将停止搜索。如果无人机数量多于任务数量,则任务将仅分配给附近的无人机,从而减少计算时间和无人机的飞行距离。通过对5个任务和3个无人机的仿真,结果表明,TABA减少了约三分之一的无人机旅行时间,展示了较低的复杂性和高效性。
Xu等人[57]提出了多离散狼群算法(MDWPA),旨在动态和复杂环境中最小化资源消耗并最大化任务执行效率。MDWPA通过离散化徘徊、召唤、围攻等狼群行为,提高了任务分配的准确性和收敛性,并引入了新的个体补充。在15个无人机和75个任务的仿真中,MDWPA在资源消耗和任务完成时间方面优于PSO和GA,取得了最短的无人机飞行距离,并保持了高解的准确性和收敛速度。
Peng等人[58]开发了二进制狼群算法(BWPA),用于不确定环境下的无人机任务分配,旨在最大化无人机飞行范围和任务效率。通过这种方法,攻击方在搜索和攻击优先级更高的目标时,建立了一个动态分配模型,使用成本效益比和任务执行时间窗口。在15个无人机和20个任务的仿真中,BWPA优于BPSO、BASFA和GA,达到了更高的任务效率和较低的计算成本,展示了在动态场景中的稳定性和适应性。
Qamar等人[59]提出了四维信息灰狼优化算法(4DI-GWO),旨在最小化威胁和飞行成本,并最大化目标摧毁收益。4DI-GWO算法通过考虑目标位置、任务持续时间和无人机生存概率的不确定性,增强了任务分配。通过对10个无人机和16个目标的仿真,结果显示4DI-GWO相比GWO、PSO和GA,收敛速度更快、全局搜索能力更强,任务完成效率更高,突出展示了其在动态环境中的鲁棒性。
表9比较了各种其他扩展的特点,突出显示了控制范式、重新分配策略和通信拓扑的差异。它重点关注使用的数据集的可扩展性、算法对动态事件的鲁棒性以及解决方案在基于时间的度量方面的响应性,为它们在动态、现实应用中的适用性提供了洞察。灰狼优化(GWO)算法及其在多无人机动态任务分配中的各种适应性方法展示了其优势和挑战。GWO的一个关键优势是其高效处理复杂和动态环境的能力,如Shi等人[56]和Xu等人[57]的研究所示,这些方法减少了无人机旅行时间和计算复杂度,同时确保了最佳任务分配。基于GWO的方法在最小化资源消耗、提高任务执行效率和保持鲁棒的收敛速度方面表现出色,如Peng等人[58]和Qamar等人[59]所展示的。这些算法在收敛性、飞行距离和任务分配效率方面优于传统方法,如PSO、GA和ACO,尤其是在不确定环境或战场场景中,需要快速调整的情况下。然而,值得注意的缺点是,这些方法通常依赖于问题的特定动态,并且一些变种可能在极端不确定性下无法保证最佳性能,因为它们可能在全局和局部搜索能力之间失衡。此外,尽管像4DI-GWO[59]这样的算法提高了收敛速度,但管理四维信息的复杂性可能会导致在某些情况下更高的计算成本。总体而言,GWO扩展非常适合动态、实时的多无人机任务分配,但必须权衡复杂性和计算成本。
表9. 扩展灰狼算法(GWO)的多无人机动态任务分配解决方案特点对比。(范式:分布式;重新分配类型:无重新分配;通信拓扑:无)。
| 参考文献 | 年份 | 参与的无人机 | 可扩展性 | 动态事件的鲁棒性 | 响应性 |
|---|---|---|---|---|---|
| [56] | 2022 | 无 | 小 | - | 基于时间(计算 + 等待) |
| [57] | 2022 | 所有 | 中 | - | 基于时间(收敛) |
| [58] | 2022 | 所有 | 中 | - | 基于时间(计算) |
| [59] | 2024 | 无 | 中 | 无人机数量变化 | 基于时间(收敛) |
4.2.5. 深度学习算法¶
深度学习使得具有多层处理的计算模型能够在不同层次的抽象中学习数据表示。这些技术在多无人机系统的动态任务分配中取得了显著进展[81]。Liu等人[60]提出了一种协调动态任务分配(CDTA)策略,使用多代理深度强化学习(MARL)和Q网络,在不确定环境中最小化无人机与目标之间的距离。MARL通过使用协调网络提出请求并确定无人机的响应,同时开发了一个Q网络来估算期望回报并判断响应者是否会参与新的动态任务,从而减少在线计算负担并提高操作速度。通过对10到180个无人机和10个动态任务的仿真,结果显示,与基于博弈论和FTA的方法相比,MARL在任务分配效率和收敛速度上表现更快,随着无人机数量的增加,展示了强大的可扩展性。
Liu等人[61]介绍了SMADDPG,一种用于无人机任务规划的多代理深度确定性策略梯度算法(DDPG),旨在最小化旅行距离和执行时间,适应三维动态环境。SMADDPG通过区分局部和全局网络输入,巧妙地调整了操作规模,能够有效管理变化的无人机集群大小。通过对6个和12个无人机的代理规模进行的仿真,结果表明,SMADDPG在任务完成效率、收敛速度和成功率方面优于DDPG和MADDPG,在动态条件下有效管理任务并保持高任务成功率。
Dai等人[62]探索了用于探索和摧毁任务的多无人机任务分配,提出了三种方法:基于拍卖、空缺链和深度Q学习(DQN),旨在最小化旅行成本并改进任务分配。在对10个无人机和40个任务的仿真中,基于拍卖的方法在最小化旅行成本方面表现优异,但导致负载不均衡。空缺链方法通过动态任务重新分配平衡了负载并减少了完成时间,尽管它带来了更高的计算成本。DQN适应性强,能够应对动态环境,提供平衡的结果,虽然效率略低于其他方法。
表10比较了各种其他扩展的特点,突出显示了控制范式、重新分配策略和通信拓扑的差异。它重点关注使用的数据集的可扩展性、算法对动态事件的鲁棒性以及解决方案在基于时间的度量方面的响应性,为它们在动态、现实应用中的适用性提供了洞察。深度学习算法在应用于多无人机动态任务分配时,展示了多种优势和挑战。其主要优势之一是能够适应动态和不确定环境,如Liu等人[60]和Liu等人[61]的研究所示,基于深度学习的方法(如MARL和SMADDPG)能够高效地处理动态任务分配,提升任务完成率、加速收敛并具有强大的可扩展性,即使随着无人机数量的增加。这些算法能够有效管理动态环境中的局部和全局复杂性,并在新任务出现或无人机失败时高效地重新分配任务。然而,这些深度学习方法的一个缺点是,相比传统的拍卖方法或博弈论方法,它们可能需要更高的计算资源,正如Dai等人[62]的研究所示。此外,尽管深度Q学习可以在没有预设计规则的情况下实现任务分配,但它在负载平衡和总体任务完成时间方面可能比空缺链或基于拍卖的方法效率稍低。总体而言,深度学习模型为动态任务分配提供了灵活且可扩展的解决方案,但在大规模或复杂环境中,可能需要平衡计算开销和效率。
表10. 扩展深度学习算法(DL)的多无人机动态任务分配解决方案特点对比。(范式:分布式)。
| 参考文献 | 年份 | 参与的无人机 | 重新分配类型 | 通信拓扑 | 可扩展性 | 动态事件的鲁棒性 | 响应性 |
|---|---|---|---|---|---|---|---|
| [60] | 2022 | 部分 | 部分 | 是 | 小 | 新任务的出现 | 基于时间(收敛) |
| [61] | 2022 | 所有 | 无重新分配 | 无 | 小 | 无人机数量变化 | 基于时间(收敛) |
| [62] | 2020 | 所有 | 无重新分配 | 无 | 中 | 新任务的出现 + 丧失无人机 | 基于时间(完成) |
4.2.6. 智能优化算法的其他扩展¶
其他文献扩展了其他基于智能的算法。Ghassemi等人[63]提出了BiG-MRTA(双图多机器人任务分配)算法,专为灾难响应设计,旨在最大化任务完成率。BiG-MRTA旨在解决具有动态出现任务且有截止时间的场景,同时考虑机器人独特的范围和载荷限制。通过最多100个无人机和1000个任务的仿真,结果表明,BiG-MRTA在任务完成率上与ILP表现相似,但速度快1000倍,优于随机游走基线,在任务完成和计算效率上都表现优异,并展示了在动态场景中的出色可扩展性。
Miao等人[64]提出了一种分布式免疫多代理算法(DIMAA),用于无人机任务分配,应用于搜救任务,旨在最小化无人机飞行范围。DIMAA使用免疫网络框架,其中每个无人机充当抗体,作为目标函数的可行解,仅在其本地网格内进行交互,以减少通信开销。每个无人机中具有最佳适应度的代理将替换掉适应度最差的代理,从而提高群体的质量并加速整体进化。通过对5个无人机、31个任务和4个新任务的仿真,结果表明,DIMAA实现了快速收敛和强大的适应性,能够高效处理动态任务重新分配,同时保持低通信开销,确保任务完成并表现出鲁棒性。
Shao等人[65]提出了一种混合分层人工势场(HL-APF)算法,将分布式人工势场与集中式分层调度机制结合,用于动态环境中的协同无人机搜索。该方法通过分段引力场优化局部搜索,同时集中式服务器确保全局任务规划。通过对10个无人机、20个任务和3个无人机故障的仿真,结果表明,HL-APF增加了目标发现和任务区域覆盖,优于HAPF-ACO和IAPF,同时在动态条件下保持鲁棒性。
表11比较了各种其他扩展的特点,突出显示了控制范式、重新分配策略和通信拓扑的差异。它重点关注使用的数据集的可扩展性、算法对动态事件的鲁棒性以及解决方案在基于时间的度量方面的响应性,为它们在动态、现实应用中的适用性提供了洞察。基于优化的算法,如GA、PSO、GWO、ABC和深度学习模型,通过提供适应性、可扩展性和快速收敛,提供了多无人机系统中动态任务分配的有效解决方案。它们的随机性增强了在嘈杂环境中的搜索覆盖率和性能,但随着问题规模的增加,它们的计算复杂度显著增加,并且在处理不确定性时的鲁棒性有限[82]。虽然这些算法在实时场景中表现良好,能够快速产生解决方案,但它们与基于市场的方法相比,可能会导致次优的结果,尤其是在可扩展性和灵活性方面。去中心化方法有助于减少通信开销,但可能会严重依赖局部交换,从而在网络中断时导致潜在的延迟。此外,许多优化算法优先考虑快速执行,而非全局优化,这可能影响长期表现。适当的调优和定制对于确保这些算法平衡效率和鲁棒性至关重要[55]。
表11. 扩展其他智能优化算法的多无人机动态任务分配解决方案特点对比。
| 参考文献 | 年份 | 范式 | 参与的无人机 | 重新分配类型 | 通信拓扑 | 可扩展性 | 动态事件的鲁棒性 | 响应性 |
|---|---|---|---|---|---|---|---|---|
| [63] | 2022 | 分布式 | 所有 | 部分 | 无 | 大 | 新任务的出现 | 基于时间(计算) |
| [64] | 2017 | 分布式 | 所有 | 所有 | 是 | 中 | 新任务的出现 + 丧失无人机 | 基于时间(收敛) |
| [65] | 2021 | 集中式/分布式 | 无(最近的一个) | 无重新分配 | 无 | 中 | 新任务的出现 + 丧失无人机 | 未考虑时间 |
4.3. 基于聚类的算法¶
基于聚类的算法将相邻或相似的任务划分为组,然后将这些任务组分配给无人机作为一个集群任务分配,而不是单一任务分配[23]。K-means是最常用的聚类算法之一,基于任务之间的距离构建聚类,并且广泛应用于任务分配问题[22]。针对基于聚类算法的多无人机动态任务分配问题,Biswas等人[66]引入了一种基于K-means聚类的最近邻搜索(NNS)模型,将任务划分为与无人机数量相等的多个集群,然后将每个任务集群分配给距离最近的无人机,以最小化路径长度和任务时间。该模型能够适应无人机故障等不确定性,通过在剩余无人机之间重新分配任务,确保任务的连续性。在3个无人机和30个任务的仿真中,NNS模型在无人机故障时表现出较高的任务完成率和有效的任务重新分配,展示了在动态环境中的鲁棒性。
Chen等人[67]提出了一种动态分组分配方法,用于增强基于共识的拍卖算法(如CBBA和IP),旨在最大化任务完成率、最小化等待时间并减少总旅行成本。首先,采用集群优先策略,将任务聚类为与可用无人机数量相等的子集。每个无人机处理其集群中的任务,直到没有任务可分配,然后与其他集群进行通信以获取更多任务。其次,采用任务包含方法,允许无人机从子集任务(集群)中选择任务,以减少无人机之间的冲突,并解决陷入局部最优解的问题。第三,采用块信息共享方法,限制无人机之间的通信,仅允许与其组成员共享信息。通过对16个无人机和最多32个任务的仿真,结果表明,该方法实现了更高的任务分配率和更短的等待时间,随着问题规模的增加,运行时间稳步增长,优于基准方法。
Tang等人[68]提出了一种将模糊C-means聚类与蚁群优化(ACO)相结合的多无人机协作任务重新分配算法,旨在最大化任务执行率并最小化飞行距离。该算法详细描述了基于紧急情况类型的完整重新分配、部分调整和集群重新分配过程。通过对5个无人机和40个任务的仿真,结果显示,基于集群的重新分配策略减少了12%的飞行距离,并实现了97%的任务完成率,优于基线和集中式ACO,展示了有效处理突发任务和任务适应性的能力。
表12比较了各种其他扩展的特点,突出显示了控制范式、重新分配策略和通信拓扑的差异。它重点关注使用的数据集的可扩展性、算法对动态事件的鲁棒性以及解决方案在基于时间的度量方面的响应性,为它们在动态、现实应用中的适用性提供了洞察。基于聚类的算法为多无人机动态任务分配提供了多个优点和挑战。通过将相似或邻近的任务分组,这些算法减少了计算复杂性,最小化了无人机的飞行距离,并提高了任务分配效率,如Biswas等人[66]和Tang等人[68]的研究所示。它们通过任务切换策略有效应对无人机故障等不确定性,确保任务的连续性。聚类方法,如K-means和模糊C-means,通过减少单个任务分配的频率简化了操作,有助于管理工作负载分配。Chen等人[67]等人的混合方法通过将聚类与基于拍卖的策略结合,进一步提高了任务完成率并减少了等待时间。然而,一个关键挑战在于确定最佳的集群大小,因为任务分配直接影响到性能和资源利用率。此外,尽管聚类算法在动态环境中表现良好,但它们的性能可能受到集群之间需要通信的影响,这可能引入延迟。总体而言,基于聚类的算法有效地平衡了计算效率与适应性,但需要仔细调优以优化集群大小,并确保在复杂的动态场景中具有可扩展性。
表12. 扩展基于聚类的算法的多无人机动态任务分配解决方案特点对比。(范式:分布式;可扩展性:中)。
| 参考文献 | 年份 | 参与的无人机 | 重新分配类型 | 通信拓扑 | 鲁棒性 | 响应性 |
|---|---|---|---|---|---|---|
| [66] | 2021 | 无 | 部分 | 无 | 无人机丧失 | 基于时间(完成) |
| [67] | 2019 | 部分 | 无重新分配 完全、部分或集群 | 是 | 新任务的出现 + 无人机丧失 | 基于时间(等待) |
| [68] | 2022 | 部分 | 是 | 新任务的出现 + 无人机丧失 + 原任务变动 | 基于时间(等待) |
5. 讨论¶
在本节中,我们提供了对多无人机动态任务分配文献的全面分析,探索了多个维度,以了解当前研究的状态和新兴趋势。分析涵盖了多个方面,包括多无人机系统中任务分配的年度出版分布、研究方法的分类、控制范式和通信拓扑。此外,还讨论了不同算法在处理各种动态事件(如新任务的出现和无人机故障)方面的鲁棒性。研究进一步根据参与的无人机数量和重新分配过程中发布的任务规模进行分析。我们还探讨了数据集规模,重点关注涉及的任务和无人机数量,以了解不同方法的可扩展性。通过这一多维分析,我们得到了一个全面的研究景观,识别了研究中的空白和未来工作的机会。
5.1. 年度出版分布¶
本综述涵盖了2013年到2024年间发布的研究,展示了多无人机动态任务分配领域的兴趣增长。如图3所示,早期的几年(2013-2016年)活动较少,每年只有一两篇文章。2017年,研究输出开始稳步增加,当年有四篇研究,标志着该领域的一个转折点。2018年和2019年这一趋势持续,每年有三到四篇文章,反映了对该领域重要性的日益认同。2022年出现了显著的激增,共有17篇论文发布,显示了解决复杂现实问题的迫切需求,尤其是通过创新的多无人机解决方案。这一增长可以归因于无人机技术的进步、资金机会的增加,以及无人系统战略重要性的广泛认可。然而,2023年出现了下降,仅有五篇文章,2024年发布的文章则降至仅一篇,这反映了研究活动的轻微放缓。尽管如此,整体的持续趋势突显了在多无人机动态任务分配中推动方法学和应用进展的持续承诺,强调了它在应对技术和操作需求变化中的关键作用。
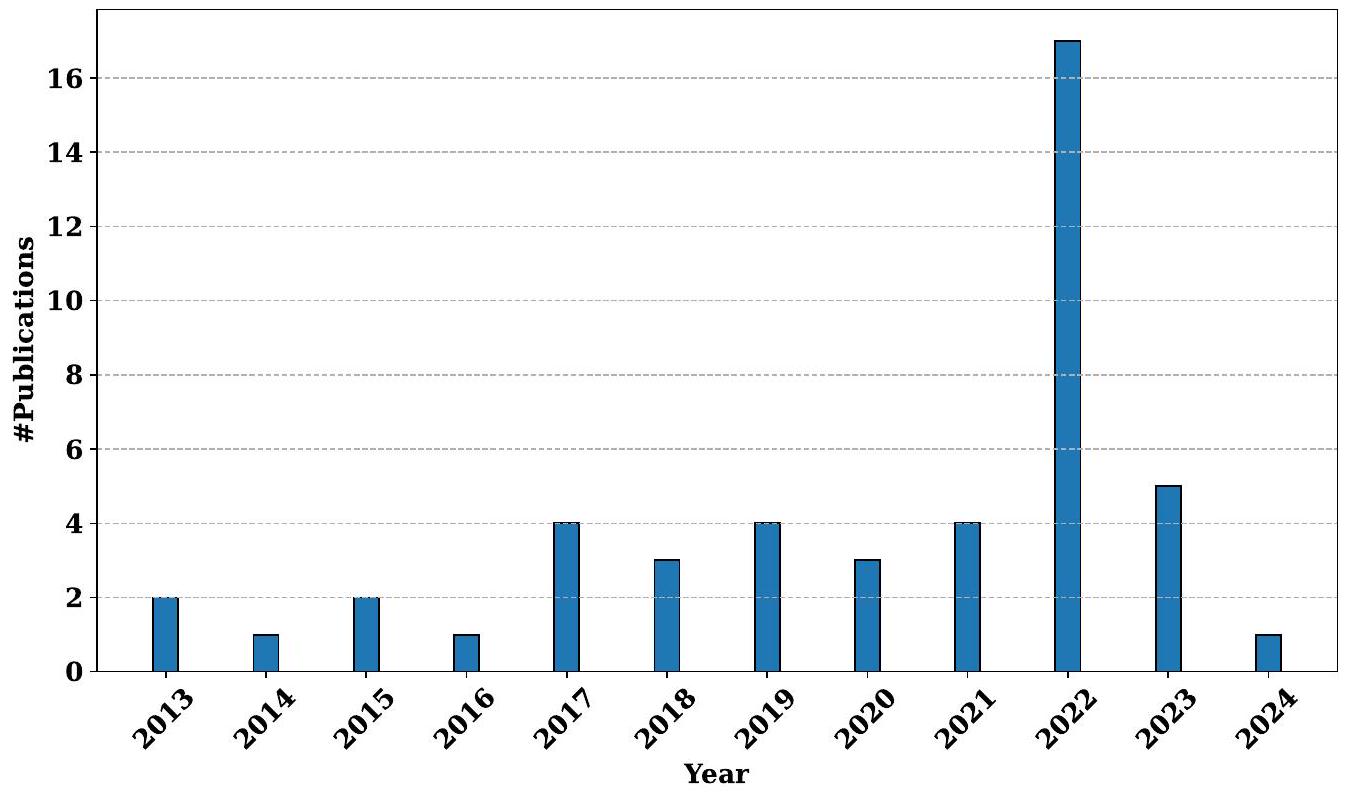
图3. 2013至2024年间关于多无人机动态任务分配的研究出版总数。
5.2. 按分类的出版分布¶
关于涵盖的论文的分类,图4提供了2013至2024年间多无人机动态任务分配研究出版物的详细可视化,按使用的算法类别进行分类。分析揭示了几个关键见解:
- 基于市场的算法:这一类在各个年份中始终保持着稳定的存在,突显了其在无人机研究中的持续相关性。特别是在2022年,出现了显著的增长,达到七篇论文,标志着该领域的一个高峰,表明对该领域的兴趣或突破有所增加。尽管2024年没有记录到出版物,但多年稳定的活动突显了在这一领域持续的研究努力。
- 智能优化算法:这一类的研究首次出现在2014年,并于2017年开始获得关注。2022年出现了显著增长,达到了九篇论文,反映了无人机操作的日益复杂性以及对先进优化技术的需求。这一趋势延续到了2024年,尽管只有一篇论文,表明在高峰之后仍然保持着持续的兴趣。
- 聚类算法:这一类的出版物出现较为零散,分别记录在2019年、2021年和2022年,总共三篇出版物。偶尔的活动表明,聚类算法是一个新兴的细分领域,可能是由特定的挑战或新应用驱动的。2024年没有相关出版物,这可能表明该领域的基础研究已完成,或关注点发生了短期转移。
这些模式突显了多无人机研究的动态性质,随着算法类别应对技术和操作挑战的变化,研究的重点也发生了相应变化。
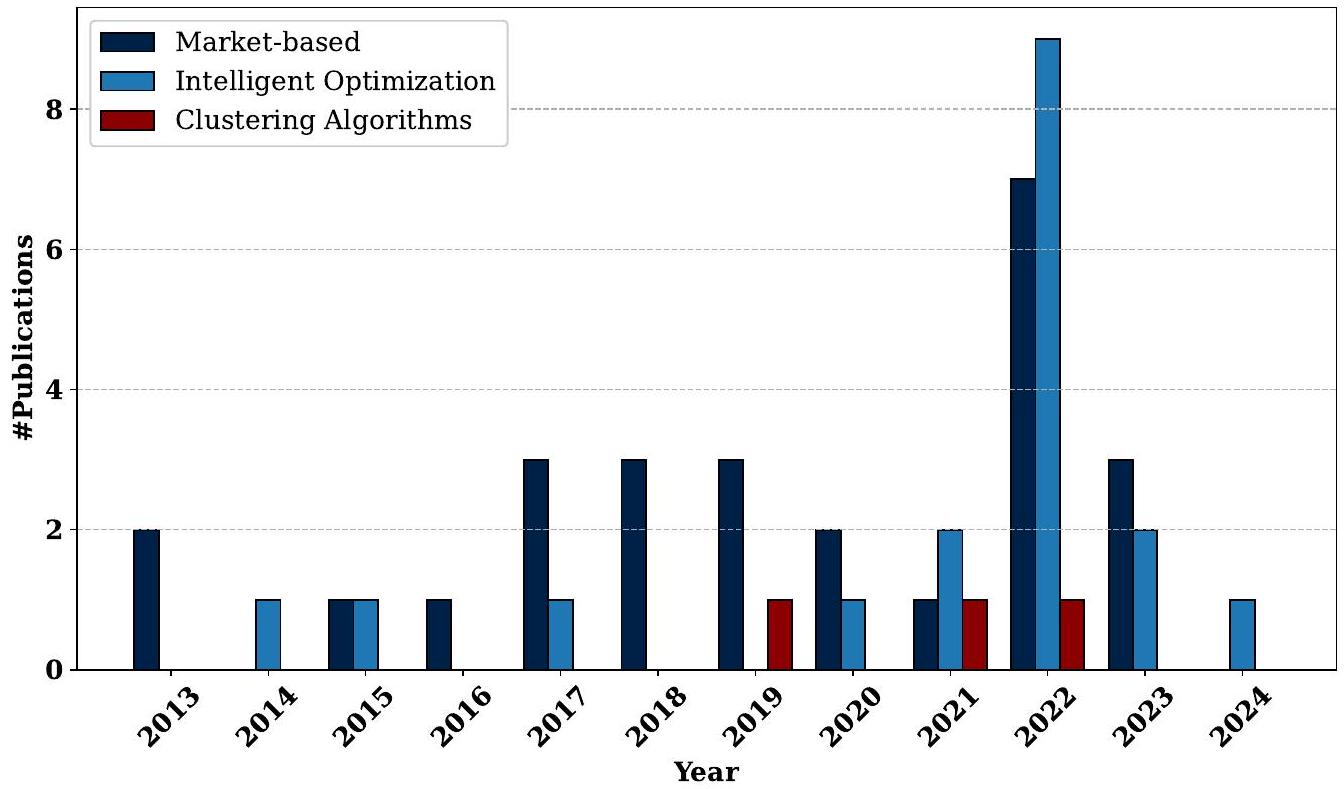
图4. 2013至2024年间多无人机动态任务分配研究的年度分布,按算法类别分类。
5.3. 控制范式¶
任务分配方法可以根据无人机团队组织和协调方式分为两种主要范式:集中式和分布式方法[3,83]。
- 集中式方法:在无人机任务分配中,集中式方法通过一个单一的控制器来管理任务和无人机之间的通信。这种方法效率高,能够减少成本和冗余工作。然而,它面临着扩展性的挑战,特别是由于通信开销、系统故障的风险以及对变化响应较慢,因此适用于较小且静态的环境。
- 分布式方法:与此相反,分布式方法不依赖于中央单元。无人机之间直接通信,从而增强了鲁棒性和可扩展性。虽然这种方法减少了通信需求,但需要达成共识以确保无冲突的任务分配,这可能会导致较慢的速度,且可能会得到次优解。尽管面临这些挑战,分布式方法在大规模环境中表现出色。
此外,越来越多的研究对混合方法表现出兴趣,这种方法结合了集中式和分布式结构的优势,实现了“全局集中、局部自治”。这种混合方法避免了完全集中系统的冗余和负担,同时缓解了完全分布式系统中的高能力要求、通信复杂性和指令冲突问题。
多无人机动态任务分配研究中控制范式的分布如图5所示,清晰展示了该领域的分布情况。图5中的分析显示,分布式范式主导了该领域,占据了83%(39篇)的研究文献。这个显著的比例突显了分布式范式的流行,可能是由于其在动态环境中管理多个无人机的可扩展性和鲁棒性。另一方面,混合(集中式-分布式)方法占了17%(8篇)。这个较小但显著的比例表明,结合集中式和分布式系统特点的方法正日益受到关注,旨在在多无人机协调中发挥两者的优势。完全集中式范式在文献中的稀缺与集中式系统的固有缺点一致,尤其是在实时和动态环境中。
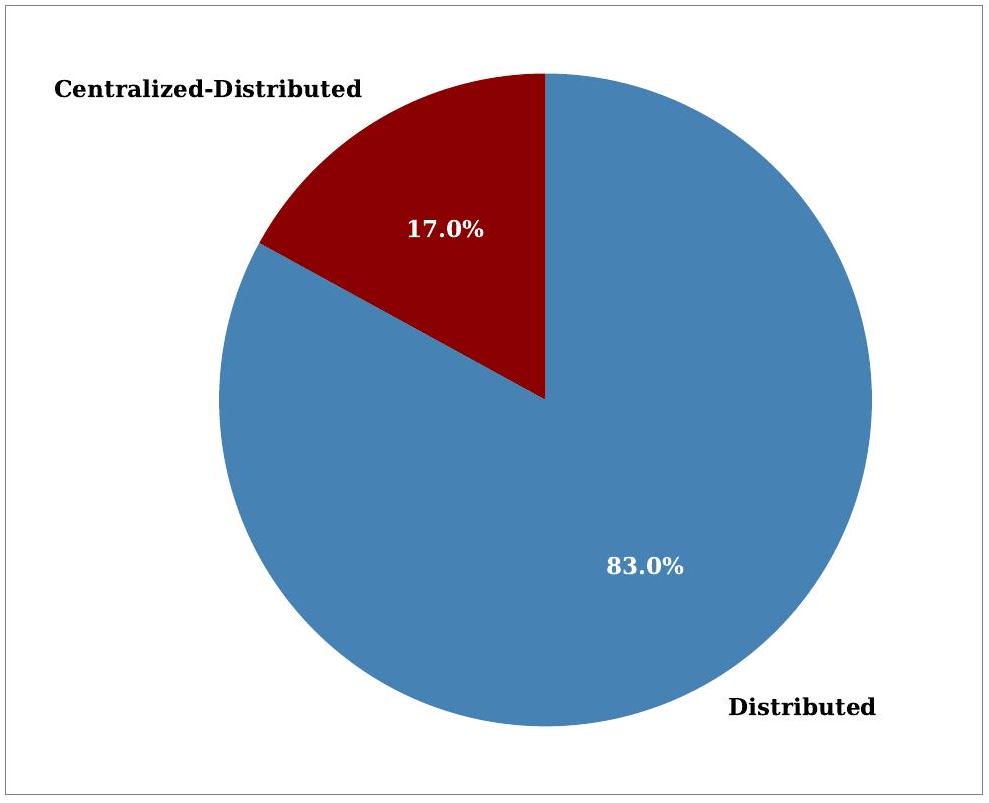
图5. 2013至2024年间多无人机动态任务分配研究中控制范式的分布。
5.4. 通信拓扑¶
在多无人机系统中,通信拓扑是定义无人机在动态任务分配任务中如何相互通信和互动的框架。所选择的拓扑结构直接影响动态任务分配的效率,特别是在需要快速适应环境变化和有效协调的场景中。图6可视化了所涵盖研究中通信拓扑考虑的分布。分析表明,许多研究(66% 共有31篇)并未强调或要求详细描述通信拓扑。这可能表明,在许多情况下,特定的通信结构要么被假定为标准化,要么对于研究目标并不至关重要。相对而言,较小但仍显著的研究比例(34%,16篇)专门讨论了通信拓扑。这些研究可能重点关注网络设计、数据共享协议以及无人机之间的实时通信,反映了通信拓扑在不同无人机任务分配场景中不同的重要性和作用。
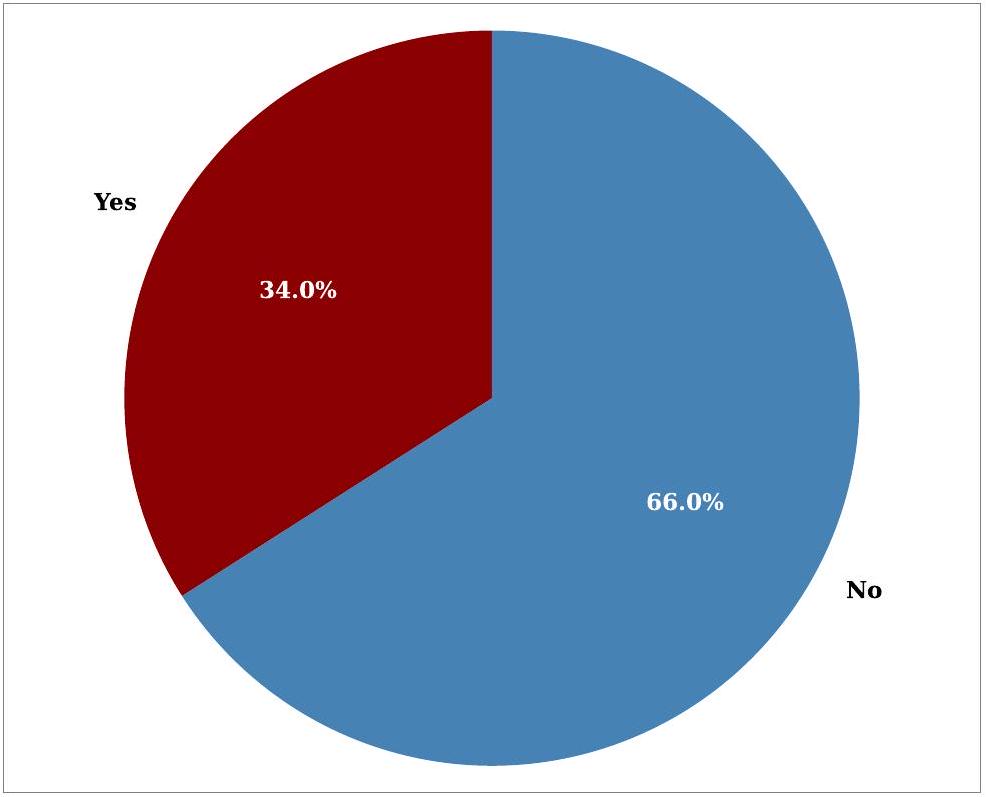
图6. 2013至2024年间多无人机动态任务分配研究中通信拓扑考虑的分布。
5.5. 处理动态事件的鲁棒性¶
有效应对动态事件的能力是稳健的多无人机任务分配系统的基石。动态环境以意外变化和不断发展的任务需求为特征,需要适应性强且具有弹性的解决方案,以确保任务成功。本节深入探讨了鲁棒性的关键方面,详细分析了不同方法如何应对动态事件带来的挑战。以下小节探讨了这些系统设计用来处理的动态事件类型、原始任务的重新分配策略以及无人机在应对这些事件时的参与程度,提供了对所调查文献中采用的方法的全面理解。
5.5.1. 动态事件类型分析¶
在动态环境中,多无人机任务分配系统应对各种突发事件的能力对任务成功至关重要。系统的鲁棒性通常通过它们对不同类型的动态事件的响应进行检验,如新任务的出现、原始任务的变化或无人机的丧失。以下分析根据已审阅的文献对可能影响任务分配和无人机操作的动态事件类型进行了分类:
- 新任务的出现:这是最常见的动态事件,其中在任务进行过程中出现新任务,需要立即处理。大量调查研究集中于新任务出现的情形,表明需要能够迅速适应并重新分配资源的算法[27,29-31,33,35,37,42,44,48,49,53,55,60,63]。这强调了在新任务需求面前快速响应的重要性。
- 新任务的出现 + 无人机丧失:一些研究探讨了不仅新任务出现的情况,还包括无人机丧失的情形,无人机可能因技术故障或环境因素而丧失。这种事件组合要求具备鲁棒的任务重新分配策略,以确保即使可用资源减少,任务依然能够顺利执行[6,18,38,45,46,50,51,62,64,65,67]。
- 原始任务的变化:在某些情况下,原始分配的任务的目标或要求发生变化,例如任务位置、时间窗口或持续时间等。这些场景要求任务管理系统具有灵活性,以适应变化而不影响整体任务[32,34,41,47]。
- 新任务的出现 + 原始任务的变化:新任务的出现和原始任务的变化的组合提出了复杂的挑战,如一些研究所讨论的[7,40]。这些算法必须具有多功能性,能够重新评估优先级,并有效地重新分配无人机以适应新的任务配置。
- 新任务的出现 + 原始任务的变化 + 无人机丧失:这类事件组合代表了一种高度动态和具有挑战性的情境,在一些研究中有涉及[39,43,54,68]。处理这些事件需要一种多方面的方法,平衡任务重新分配、资源管理和系统鲁棒性。
- 新任务的出现 + 丧失原有任务:一些研究专注于新任务的出现和现有任务丧失的情况,这可能是由于任务过期或环境变化使得某些任务不再有效。高效的资源重新分配在这些情况下对于保持操作效率至关重要[28]。
- 新任务的出现 + 原始任务的变化 + 新无人机的加入 + 无人机丧失:参考文献[19]讨论了这一复杂的事件集合,展示了需要全面策略来同时管理多个变化的需求,包括根据需要增加或减少无人机队列。
- 无人机丧失:研究[66]探讨了无人机丧失这一单一事件,重点关注系统如何在丧失部分无人机后重新分配任务,防止任务失败。
- 网络断开:网络断开是一个独特的挑战,参考文献[36]中讨论了这一问题,强调了在保证任务协调和执行的顺利进行时维持无人机之间稳定通信链接的重要性。
- 无人机数量变化:一些算法处理在任务执行过程中无人机数量变化的动态事件,要求具有灵活的任务分配策略,以适应资源的波动[59,61]。
- 未提及具体动态事件:一些研究没有关注特定的动态事件,可能表明假设环境是静态的,或者所提出的方法在处理动态挑战时具有广泛的适用性[52,56-58]。
这一分析突显了多无人机系统必须能够处理的动态事件类型的多样性。适应这些事件的能力对确保无人机任务分配算法的鲁棒性和有效性至关重要,尤其是在复杂和不可预测的环境中。
5.5.2. 原始任务重新分配策略分析¶
在多无人机任务分配中,适应新的动态事件的能力对于维持任务的有效性至关重要。根据检测到的事件的性质,可能需要重新分配最初分配给无人机的任务,以确保在处理检测到的事件时的最佳表现。处理这些重新分配的策略在文献中各不相同,从不重新分配到部分或完全重新分配原始任务。所审阅文献中的研究根据它们在检测到新动态事件后的任务重新分配方式进行了分类,提供了有关维持任务有效性的不同方法的洞察,这在图7中得到了可视化。
- 不重新分配:如图7所示,大多数研究(60%)选择在检测到新动态事件后不重新分配原始任务。此方法代表了大部分文献,假设尽管环境发生变化,原始任务分配仍然有效或最优。不重新分配的决定可能是为了最小化干扰并保持任务的连续性。然而,这种方法可能不适用于高度动态的环境,其中任务需求或资源可用性可能迅速变化[18,28,32,34-38,40,41,44-48,50-53,55-58,61,62,65,67]。
- 部分重新分配:相当一部分研究(32%)实施部分任务重新分配。Refs. [6,7,19,27,29,30,33,38,39,42,43,49,60,63,66]采用了灵活的方法,选择性地重新分配某些任务,同时保持其他任务的稳定性。部分重新分配策略通常用于在保证响应性的同时维持任务稳定,确保关键变化得到处理,而不完全重新分配任务。
- 完全重新分配:较少的一些研究(9%)主张在检测到新动态事件后完全重新分配所有任务。这一策略通常用于环境发生重大变化时,要求完全重新分配任务以确保最佳表现。虽然完全重新分配可能是资源密集型的,并且可能导致无人机重新分配时的延迟,但它提供了在不可预测场景中的最高适应性。
图7清晰地展示了这些策略在调查研究中的分布。重新分配策略的选择反映了多无人机任务分配中应对动态事件的不同方法,受任务目标、环境性质和可用计算资源的影响。

图7. 多无人机动态任务分配研究中的任务重新分配策略分布。
5.5.3. 参与无人机的动态事件响应分析¶
在多无人机任务分配系统中,响应新检测到的动态事件时,参与的无人机数量可能会有所不同,这取决于采用的策略。参与程度——无论是所有无人机、仅一部分无人机,还是仅检测到事件的无人机——都会显著影响系统的灵活性、效率和鲁棒性。
- 所有无人机参与:大多数研究(62%)主张在处理检测到的动态事件时,所有可用的无人机都参与进来。此方法在Refs. [6,19,28,29,31-45,48,50,51,57,58,61-64]中有体现。利用整个无人机队伍确保了最大的覆盖范围和资源分配,使系统能够有效地管理突然出现的复杂或大规模任务。然而,这种策略可能会消耗更多的资源,并导致较高的通信开销。
- 部分无人机参与:相当一部分研究(28%)实施了只让部分无人机参与应对新事件的策略。Refs. [7,18,27,30,46,47,49,53,55,60,67]采用了更为审慎的响应策略,仅利用必要数量的无人机来应对动态事件,同时最小化资源使用和通信负载。这种方法通常用于那些并非所有无人机都需要参与才能实现预期结果的场景,从而优化操作效率。
- 不额外参与无人机:少部分研究(11%)表示只有检测到事件的无人机处理动态事件,而没有其他无人机参与。这个极简主义的方法,见于Refs. [52,56,59,65,66],通常用于事件局部化或检测到事件的无人机资源足以独立处理任务的环境中。虽然这种策略减少了复杂性和通信需求,但对于更具挑战性或广泛影响的事件可能不太适用。
图8展示了这些策略的分布,突出显示了在大多数场景中倾向于让所有无人机参与的趋势。参与程度的选择反映了不同无人机任务分配系统的运营需求和目标,资源管理、任务复杂性以及通信效率在决策过程中起到了至关重要的作用。
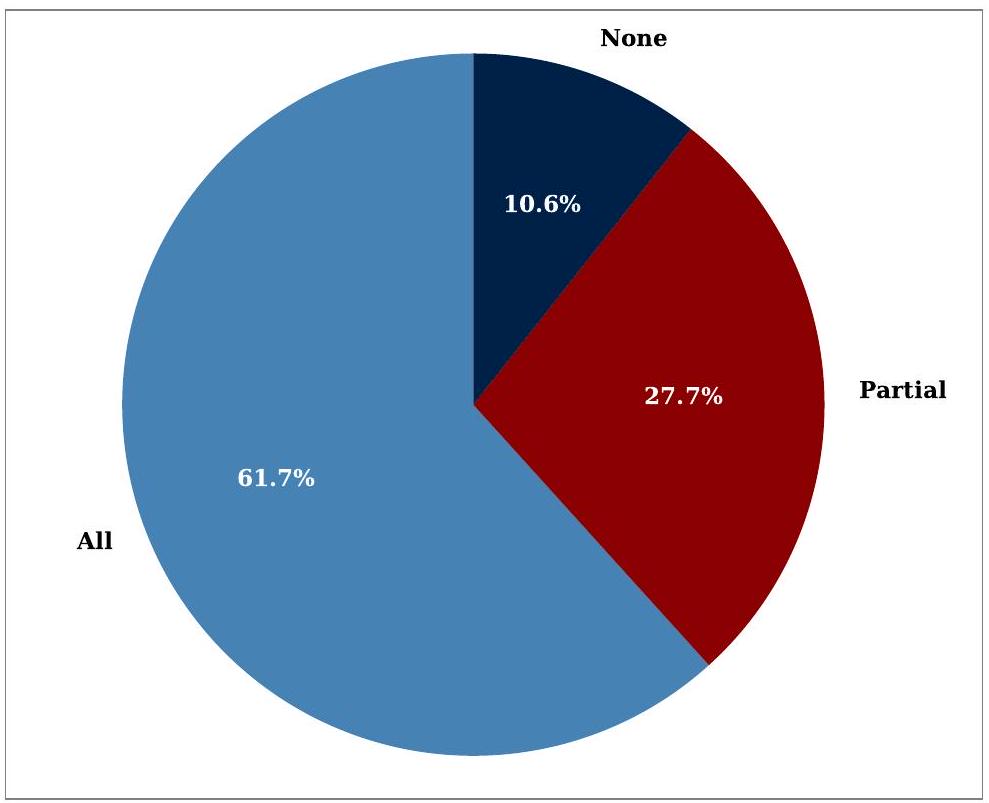
图8. 多无人机任务分配研究中响应动态事件的无人机参与策略分布。
5.6. 数据集规模¶
本节详细分析了在各种实验中使用的数据集规模,数据集规模由使用的无人机数量和任务数量表示。图9和图10中的散点图提供了多无人机动态任务分配研究中使用的无人机和任务数量的全面概述。图10展示了无人机数量,并暗示了大部分研究集中在小到中型的无人机群体上。这一趋势反映了研究在测试算法效率和协调性方面对可管理但具有现实意义的群体规模的关注。图9展示了任务数量,主要特征是中等数量的任务数据集。这表明,研究更倾向于选择足以挑战算法的复杂性,但又保持在可分析和实施的实际范围内。
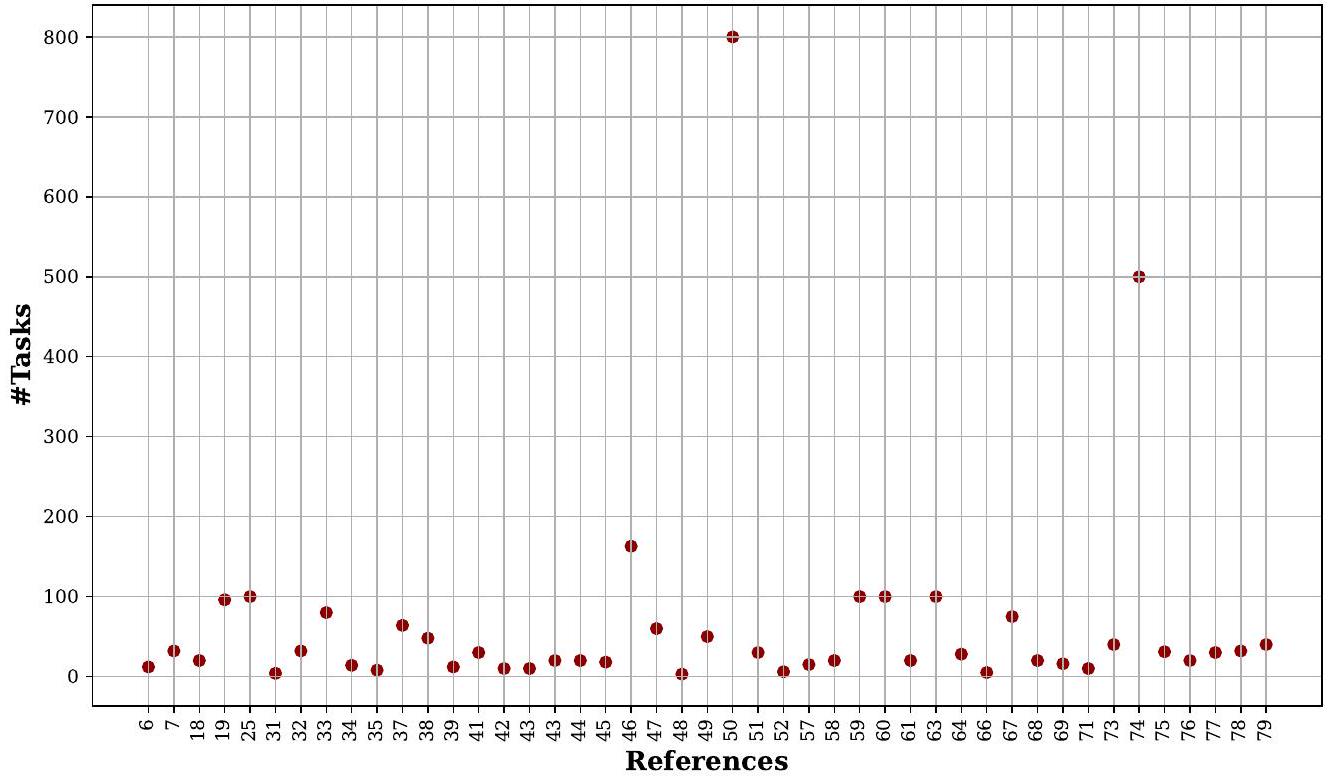
图9. 原始任务数量的散点图。
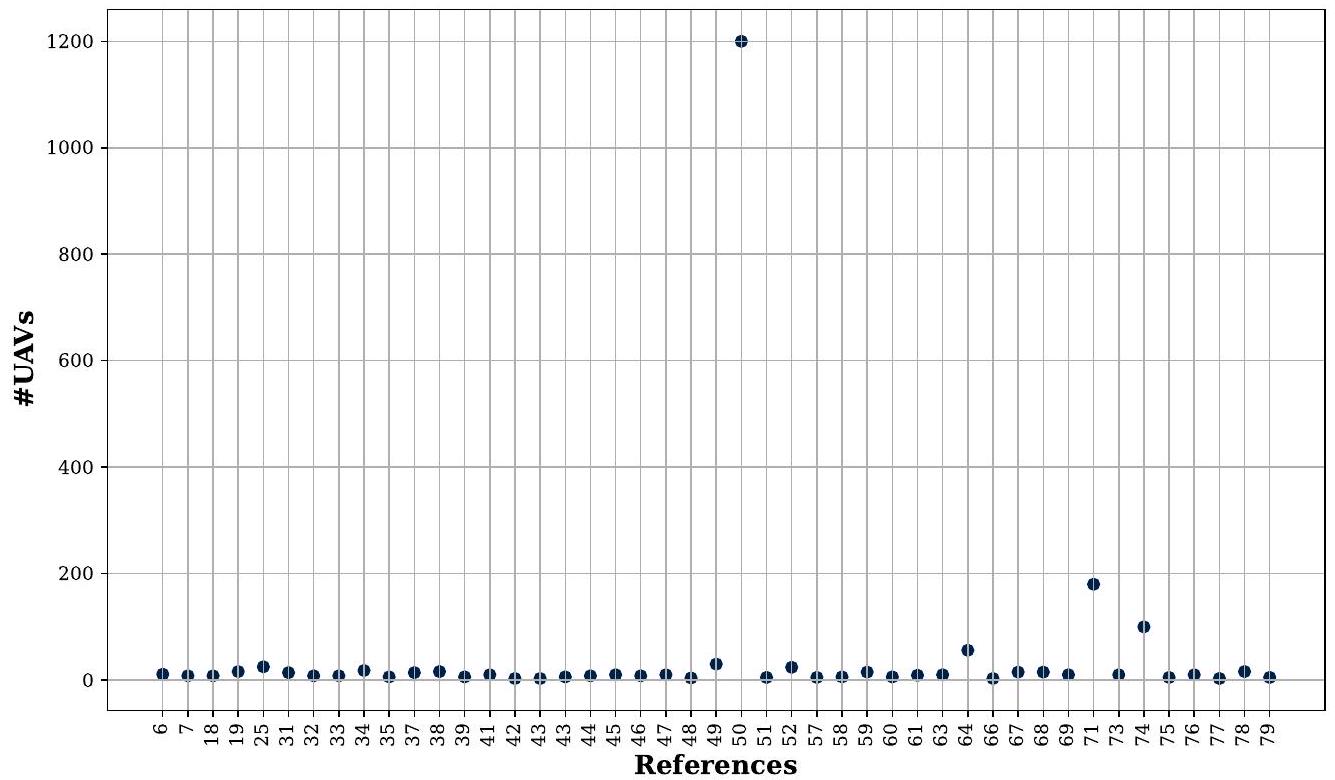
图10. 无人机数量的散点图。
分类表(表13)进一步将数据集分为三个不同的类别:小规模(1-10任务)、中等规模(11-100任务)和大规模(100+任务)。小规模类的研究通常专注于在较少复杂的场景中进行精度和优化,使其成为调整无人机性能和任务分配策略的理想选择。中等规模类,包括大多数研究,代表了一种平衡的方法,在中等挑战的环境中测试算法,可能反映了更广泛的现实应用。尽管不太常见,大规模类的研究对于评估算法在高需求和复杂操作中的可扩展性和鲁棒性至关重要。
表13. 实例级别和参考文献。
| 实例级别 | 参考文献 |
|---|---|
| 小规模 (1-10) | [28,32,37,38,43,47,56,60] |
| 中等规模 (10-100) | [6,7,18,19,27,29-31,33-36,38-40,42,44,46,49-53,55,57,58,62,64,65] |
| 大规模 (100及以上) | [41,45,63] |
5.6. 开放问题与研究挑战¶
多无人机动态任务分配领域存在几个尚未解决的挑战,这些挑战限制了其在现实应用中的潜力。以下,我们讨论了这些挑战并提出了未来解决方向。
- 可扩展性:现有的算法通常在无人机和任务数量增加时难以保持性能。管理大规模无人机机群的计算和通信需求可能显著限制可扩展性。为了解决这一问题,开发轻量且高效的算法,能够在不妥协任务分配质量或实时响应性的前提下适应更大规模的系统,是至关重要的。
- 动态环境中的鲁棒性:动态环境会引入频繁的变化,如新任务的突然出现、无人机故障和任务优先级的波动。许多当前的解决方案缺乏处理这些不可预测情况所需的鲁棒性。为了应对这一问题,增强算法的鲁棒性,包括容错机制和自适应任务重新分配策略,是确保任务连续性的必要条件。
- 通信限制:分布式多无人机系统通常面临通信延迟、带宽限制和间歇性连接等问题,这会降低协调和任务分配的性能。为了解决这些挑战,设计通信高效的算法,减少带宽使用并确保在受限或对抗环境中也能可靠地交换数据,是至关重要的。
- 多目标优化:无人机任务分配涉及竞争的目标,如最大化任务吞吐量、最小化能耗和减少完成时间。平衡这些目标非常复杂,且常常被忽视。为了解决这些困难,需要建立多目标优化框架,考虑性能指标之间的权衡,以确保现实任务的成功。
- 混合方法:尽管集中式方法提供了全局优化,而分布式方法在适应性方面表现出色,但将这两种范式结合为混合解决方案仍未得到充分探讨。通过发展利用集中式和分布式系统优点的混合任务分配策略,可以提升可扩展性和鲁棒性,弥补两者的缺陷。
- 实时适应性:算法必须能够实时应对环境变化、无人机可用性变化和任务参数变化。许多现有的解决方案缺乏动态重新分配的适应性。作为解决方案,设计具备快速决策能力和低计算开销的算法,对于实时操作至关重要。
- 能量管理:无人机受限于有限的能量资源,这影响其操作范围和任务执行能力。动态环境中的任务分配解决方案往往忽视能效问题。为了解决这一问题,整合能量感知的任务分配机制,优化能量使用的同时保持任务效果,是一个关键研究方向。
- 伦理与安全问题:无人机系统的双重用途潜力以及其易受网络攻击的特点,带来了显著的伦理和安全风险。为了确保负责任的使用,需要建立安全的通信协议、伦理指南和透明的部署实践,以减少这些风险并促进负责任的使用。
- 基准测试与标准化:缺乏标准化的基准测试和评估指标,使得算法之间的比较和性能一致性评估变得困难。为了促进创新,创建能够反映不同动态条件的现实基准,将使公平比较成为可能并推动创新。
解决这些开放问题和挑战需要跨学科的研究,结合算法、通信技术和伦理实践的进步。通过填补这些空白,未来的研究可以推动多无人机动态任务分配系统的开发,使其更加稳健、可扩展并适应现实世界的动态环境。
7. 结论¶
本文综述了多无人机动态任务分配领域的文献,分析了旨在优化动态环境中任务成功的各种解决方案。它强调了动态任务分配在实现有效无人机操作中的重要性,特别是在环境条件、任务要求和可用资源受不可预测变化影响的场景中。分析表明,基于市场的解决方案是最常使用的策略之一,因其在分布式系统中的适应性和可扩展性。基于优化的算法和聚类解决方案也在解决动态任务分配的复杂性方面发挥了重要作用,各自提供了独特的优势和局限。
本研究观察到的一个显著趋势是越来越多的研究着重于增强现有解决方案,更好地应对动态环境的特定挑战,如快速任务重新分配、无人机故障和能效问题。比较分析揭示,尽管许多研究优先考虑分布式方法,但越来越多的研究关注混合方法,这些方法将集中式和分布式策略相结合,以充分利用两者的优点。进一步的综述突显了仍未充分探索的领域,包括通信限制、无人机特定限制和多目标优化的需求。
本文不仅提供了当前方法的详细概述,还通过识别关键的空白和改进领域,为推动该领域的发展奠定了基础。专门讨论开放问题和研究挑战的部分进一步勾画了未来工作的关键方向,强调了对更可扩展、鲁棒和适应性强的任务分配策略的需求。解决这些问题将为开发能够处理现实世界动态环境复杂性的更有效解决方案铺平道路。
通过基于这些见解,未来的研究可以推动创新算法和方法的发展,确保多无人机任务分配系统在复杂和不可预测的场景中实现卓越的性能和可靠性。
作者贡献:本文由S.A.构思和撰写,负责收集、组织和分析文献,并草拟手稿。M.E.B.M.作为导师,在整个过程中提供了专家指导,特别是在完善研究设计和结构方面,并参与了最终的审阅和编辑。所有作者已阅读并同意本文的发表版本。
资助:本研究未接受外部资助。
知情同意声明:本研究不涉及人类参与者、动物或任何无人机(UAV)实际测试。
数据可用性声明:本研究过程中生成或分析的所有数据均包含在本文中。
DURC声明:本研究专注于多无人机动态任务分配算法的学术研究和开发,旨在优化灾难响应、环境监测和搜索救援等场景中的任务成功。该研究不对公共健康或国家安全构成威胁。作者承认无人机相关研究的双重用途潜力,并确认已采取所有必要的预防措施以防止误用。该研究遵守有关双重用途研究的相关国家和国际法律法规。作者倡导无人机技术的伦理部署、合规使用,并促进社会利益的同时减少风险。
冲突声明:作者声明无冲突利益。
References¶
- Fang, B.; Zhang, Q.; Wang, H.; Yuan, X. Personality driven task allocation for emotional robot team. Int. J. Mach. Learn. Cybern. 2018, 9, 1955-1962. [CrossRef]
- Palmer, A.W.; Hill, A.J.; Scheding, S.J. Modelling resource contention in multi-robot task allocation problems with uncertain timing. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21-25 May 2018; pp. 3693-3700.
- Khamis, A.; Hussein, A.; Elmogy, A. Multi-robot task allocation: A review of the state-of-the-art. Coop. Robot. Sens. Netw. 2015, 2015, 31-51.
- Li, Z.; Li, X. Research on model and algorithm of task allocation and path planning for multi-robot. Open J. Appl. Sci. 2017, 7, 511. [CrossRef]
- Korsah, G.A.; Stentz, A.; Dias, M.B. A comprehensive taxonomy for multi-robot task allocation. Int. J. Robot. Res. 2013, 32, 1495-1512. [CrossRef]
- Qin, B.; Zhang, D.; Tang, S.; Wang, M. Distributed grouping cooperative dynamic task assignment method of UAV swarm. Appl. Sci. 2022, 12, 2865. [CrossRef]
- Yang, M.; Bi, W.; Zhang, A.; Gao, F. A distributed task reassignment method in dynamic environment for multi-UAV system. Appl. Intell. 2022, 52, 1582-1601. [CrossRef]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Alsamhi, S.H.; Hawbani, A. Multi-UAV and SAR collaboration model for disaster management in B5G networks. Internet Technol. Lett. 2024, 7, e310. [CrossRef]
- Otte, M.; Kuhlman, M.J.; Sofge, D. Auctions for multi-robot task allocation in communication limited environments. Auton. Robot. 2020, 44, 547-584. [CrossRef]
- Robin, C.; Lacroix, S. Multi-robot target detection and tracking: Taxonomy and survey. Auton. Robot. 2016, 40, 729-760. [CrossRef]
- Kapoutsis, A.C.; Chatzichristofis, S.A.; Doitsidis, L.; De Sousa, J.B.; Pinto, J.; Braga, J.; Kosmatopoulos, E.B. Real-time adaptive multi-robot exploration with application to underwater map construction. Auton. Robot. 2016, 40, 987-1015. [CrossRef]
- Torreno, A.; Onaindia, E.; Komenda, A.; Štolba, M. Cooperative multi-agent planning: A survey. ACM Comput. Surv. (CSUR) 2017, 50, 1-32. [CrossRef]
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans. Ind. Inform. 2012, 9, 427-438. [CrossRef]
- Chopra, S.; Notarstefano, G.; Rice, M.; Egerstedt, M. A distributed version of the hungarian method for multirobot assignment. IEEE Trans. Robot. 2017, 33, 932-947. [CrossRef]
- Jang, I.; Shin, H.S.; Tsourdos, A. Anonymous hedonic game for task allocation in a large-scale multiple agent system. IEEE Trans. Robot. 2018, 34, 1534-1548. [CrossRef]
- Schillinger, P.; Bürger, M.; Dimarogonas, D.V. Simultaneous task allocation and planning for temporal logic goals in heterogeneous multi-robot systems. The Int. J. Robot. Res. 2018, 37, 818-838. [CrossRef]
- Xie, S.; Zhang, A.; Bi, W.; Tang, Y. Multi-UAV mission allocation under constraint. Appl. Sci. 2019, 9, 2184. [CrossRef]
- Duan, X.; Liu, H.; Tang, H.; Cai, Q.; Zhang, F.; Han, X. A novel hybrid auction algorithm for multi-UAVs dynamic task assignment. IEEE Access 2019, 8, 86207-86222. [CrossRef]
- Whitbrook, A.; Meng, Q.; Chung, P.W. Reliable, distributed scheduling and rescheduling for time-critical, multiagent systems. IEEE Trans. Autom. Sci. Eng. 2017, 15, 732-747. [CrossRef]
- Song, J.; Zhao, K.; Liu, Y. Survey on mission planning of multiple unmanned aerial vehicles. Aerospace 2023, 10, 208. [CrossRef]
- Nunes, E.; Manner, M.; Mitiche, H.; Gini, M. A taxonomy for task allocation problems with temporal and ordering constraints. Robot. Auton. Syst. 2017, 90, 55-70. [CrossRef]
- Peng, Q.; Wu, H.; Xue, R. Review of dynamic task allocation methods for UAV swarms oriented to ground targets. Complex Syst. Model. Simul. 2021, 1, 163-175. [CrossRef]
- Seenu, N.; RM, K.C.; Ramya, M.; Janardhanan, M.N. Review on state-of-the-art dynamic task allocation strategies for multiplerobot systems. Ind. Robot. Int. J. Robot. Res. Appl. 2020, 47, 929-942.
- Poudel, S.; Moh, S. Task assignment algorithms for unmanned aerial vehicle networks: A comprehensive survey. Veh. Commun. 2022, 35, 100469. [CrossRef]
- Cattrysse, D.G.; Van Wassenhove, L.N. A survey of algorithms for the generalized assignment problem. Eur. J. Oper. Res. 1992, 60, 260-272. [CrossRef]
- Ross, G.T.; Soland, R.M. A branch and bound algorithm for the generalized assignment problem. Math. Program. 1975, 8, 91-103. [CrossRef]
- Chen, J.; Qing, X.; Ye, F.; Xiao, K.; You, K.; Sun, Q. Consensus-based bundle algorithm with local replanning for heterogeneous multi-UAV system in the time-sensitive and dynamic environment. J. Supercomput. 2022, 78, 1712-1740. [CrossRef]
- Fu, X.; Feng, P.; Gao, X. Swarm UAVs task and resource dynamic assignment algorithm based on task sequence mechanism. IEEE Access 2019, 7, 41090-41100. [CrossRef]
- Zhang, Y.; Feng, W.; Shi, G.; Jiang, F.; Chowdhury, M.; Ling, S.H. UAV swarm mission planning in dynamic environment using consensus-based bundle algorithm. Sensors 2020, 20, 2307. [CrossRef]
- Buckman, N.; Choi, H.L.; How, J.P. Partial replanning for decentralized dynamic task allocation. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7-11 January 2019; p. 0915.
- Wang, W.; Lv, M.; Ru, L.; Lu, B.; Hu, S.; Chang, X. Multi-UAV unbalanced targets coordinated dynamic task allocation in phases. Aerospace 2022, 9, 491. [CrossRef]
- Wu, W.; Cui, N.; Shan, W.; Wang, X. Distributed task allocation for multiple heterogeneous UAVs based on consensus algorithm and online cooperative strategy. Aircr. Eng. Aerosp. Technol. 2018, 90, 1464-1473. [CrossRef]
- Turner, J.; Meng, Q.; Schaefer, G.; Whitbrook, A.; Soltoggio, A. Distributed task rescheduling with time constraints for the optimization of total task allocations in a multirobot system. IEEE Trans. Cybern. 2017, 48, 2583-2597. [CrossRef] [PubMed]
- Cui, W.; Li, R.; Feng, Y.; Yang, Y. Distributed task allocation for a multi-UAV system with time window constraints. Drones 2022, 6,226. [CrossRef]
- Qamar, R.A.; Sarfraz, M.; Rahman, A.; Ghauri, S.A. Multi-criterion multi-UAV task allocation under dynamic conditions. J. King Saud-Univ.-Comput. Inf. Sci. 2023, 35, 101734. [CrossRef]
- Oh, G.; Kim, Y.; Ahn, J.; Choi, H.L. Market-based task assignment for cooperative timing missions in dynamic environments. J. Intell. Robot. Syst. 2017, 87, 97-123. [CrossRef]
- Moon, S.; Oh, E.; Shim, D.H. An integral framework of task assignment and path planning for multiple unmanned aerial vehicles in dynamic environments. J. Intell. Robot. Syst. 2013, 70, 303-313. [CrossRef]
- Zhang, Z.; Liu, H.; Wu, G. A Dynamic Task Scheduling Method for Multiple UAVs Based on Contract Net Protocol. Sensors 2022, 22, 4486. [CrossRef]
- Wang, G.; Lv, X.; Yan, X. A Two-Stage Distributed Task Assignment Algorithm Based on Contract Net Protocol for Multi-UAV Cooperative Reconnaissance Task Reassignment in Dynamic Environments. Sensors 2023, 23, 7980. [CrossRef]
- Wu, Y.; Gou, J.; Ji, H.; Deng, J. Hierarchical mission replanning for multiple UAV formations performing tasks in dynamic situation. Comput. Commun. 2023, 200, 132-148. [CrossRef]
- Farinelli, A.; Iocchi, L.; Nardi, D. Distributed on-line dynamic task assignment for multi-robot patrolling. Auton. Robot. 2017, 41, 1321-1345. [CrossRef]
- Li, X.; Liang, Y. An optimal online distributed auction algorithm for multi-uav task allocation. In LISS 2021, Proceedings of the 11th International Conference on Logistics, Informatics and Service Sciences, Singapore, 28 January 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 537-548.
- Wang, C.; Wen, X.; Niu, Y.; Wu, L.; Yin, D.; Li, J. Dynamic task allocation for heterogeneous manned-unmanned aerial vehicle teamwork. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi'an, China, 30 November-2 December 2018; pp. 3345-3349.
- Cheng, Q.; Yin, D.; Yang, J.; Shen, L. An auction-based multiple constraints task allocation algorithm for multi-UAV system. In Proceedings of the 2016 International Conference on Cybernetics, Robotics and Control (CRC), Hong Kong, China, 19-21 August 2016; pp. 1-5.
- Hao, N.; Yi, H.; Tian, C.; Yao, H.; He, F. A Distributed-Centralized Dynamic Task Allocation Algorithm for UAVs Tracking Moving Targets. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, \(26-28\) July 2021; pp. 3774-3779.
- Kim, M.H.; Baik, H.; Lee, S. Resource welfare based task allocation for UAV team with resource constraints. J. Intell. Robot. Syst. 2015, 77, 611-627. [CrossRef]
- García, P.; Caama no, P.; Duro, R.J.; Bellas, F. Scalable task assignment for heterogeneous multi-robot teams. Int. J. Adv. Robot. Syst. 2013, 10, 105. [CrossRef]
- Chen, C.; Bao, W.; Men, T.; Zhu, X.; Wang, J.; Wang, R. NECTAR-An Agent-Based Dynamic Task Allocation Algorithm in the UAV Swarm. Complexity 2020, 2020, 6747985. [CrossRef]
- Wu, W.; Xu, J.; Sun, Y. Integrate assignment of multiple heterogeneous unmanned aerial vehicles performing dynamic disaster inspection and validation task with Dubins path. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 4018-4032. [CrossRef]
- Yan, S. Research on Heterogeneous UAVs Task Assignment Based on Improved Contract Net Algorithm. In Proceedings of the 2021 6th International Conference on Robotics and Automation Engineering (ICRAE), Guangzhou, China, 19-22 November 2021; pp. 60-64.
- Gao, X.; Wang, L.; Su, X.; Lu, C.; Ding, Y.; Wang, C.; Peng, H.; Wang, X. A Unified Multi-Objective Optimization Framework for UAV Cooperative Task Assignment and Re-Assignment. Mathematics 2022, 10, 4241. [CrossRef]
- Fei, B.; Liu, D.; Zhou, J.; Bao, W.; Chen, F.; Zhang, H. A spectral clustering enabled dynamic task allocation approach of multiple uavs. In Proceedings of the 2022 8th International Conference on Big Data and Information Analytics (BigDIA), Guiyang, China, 24-25 August 2022; pp. 408-415.
- Cao, L.; Tan, H.S.; Peng, H.; Pan, M.C. Multiple UAVs hierarchical dynamic task allocation based on PSO-FSA and decentralized auction. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5-10 December 2014; pp. 2368-2373.
- Liu, H.; Zhang, P.; Hu, B.; Moore, P. A novel approach to task assignment in a cooperative multi-agent design system. Appl. Intell. 2015, 43, 162-175. [CrossRef]
- Liu, B.; Wang, S.; Li, Q.; Zhao, X.; Pan, Y.; Wang, C. Task assignment of UAV swarms based on deep reinforcement learning. Drones 2023, 7, 297. [CrossRef]
- Shi, J.; Tan, L.; Lian, X.; Xu, T.; Zhang, H.; Zhang, Y. A multi-unmanned aerial vehicle dynamic task assignment method based on bionic algorithms. Comput. Electr. Eng. 2022, 99, 107820. [CrossRef]
- Xu, S.; Li, L.; Zhou, Z.; Mao, Y.; Huang, J. A task allocation strategy of the UAV swarm based on multi-discrete wolf pack algorithm. Appl. Sci. 2022, 12, 1331. [CrossRef]
- Peng, Q.; \(\mathrm{Wu}, \mathrm{H} . ; \mathrm{Li}, \mathrm{N}\). Modeling and solving the dynamic task allocation problem of heterogeneous UAV swarm in unknown environment. Complexity 2022, 2022, 9219805. [CrossRef]
- Qamar, R.A.; Sarfraz, M.; Ghauri, S.A.; Mahmood, A. TRMaxAlloc: Maximum task allocation using reassignment algorithm in multi-UAV system. Comput. Commun. 2023, 206, 110-123. [CrossRef]
- Liu, D.; Dou, L.; Zhang, R.; Zhang, X.; Zong, Q. Multi-agent reinforcement learning-based coordinated dynamic task allocation for heterogenous UAVs. IEEE Trans. Veh. Technol. 2022, 72, 4372-4383. [CrossRef]
- Liu, Z.; Qiu, C.; Zhang, Z. Sequence-to-sequence multi-agent reinforcement learning for multi-UAV task planning in 3D dynamic environment. Appl. Sci. 2022, 12, 12181. [CrossRef]
- Dai, W.; Lu, H.; Xiao, J.; Zeng, Z.; Zheng, Z. Multi-robot dynamic task allocation for exploration and destruction. J. Intell. Robot. Syst. 2020, 98, 455-479. [CrossRef]
- Ghassemi, P.; Chowdhury, S. Multi-robot task allocation in disaster response: Addressing dynamic tasks with deadlines and robots with range and payload constraints. Robot. Auton. Syst. 2022, 147, 103905. [CrossRef]
- Miao, Y.; Zhong, L.; Yin, Y.; Zou, C.; Luo, Z. Research on dynamic task allocation for multiple unmanned aerial vehicles. Trans. Inst. Meas. Control 2017, 39, 466-474. [CrossRef]
- Shao, R.; Tao, R.; Liu, Y.; Yang, Y.; Li, D.; Chen, J. UAV cooperative search in dynamic environment based on hybrid-layered APF. EURASIP J. Adv. Signal Process. 2021, 2021, 101. [CrossRef]
- Biswas, S.; Anavatti, S.G.; Garratt, M.A. Path planning and task assignment for multiple UAVs in dynamic environments. In Unmanned Aerial Systems; Elsevier: Amsterdam, The Netherlands, 2021; pp. 81-102.
- Chen, X.; Zhang, P.; Du, G.; Li, F. A distributed method for dynamic multi-robot task allocation problems with critical time constraints. Robot. Auton. Syst. 2019, 118, 31-46. [CrossRef]
- Tang, J.; Chen, X.; Zhu, X.; Zhu, F. Dynamic reallocation model of multiple unmanned aerial vehicle tasks in emergent adjustment scenarios. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 1139-1155. [CrossRef]
- Luo, L.; Chakraborty, N.; Sycara, K. Distributed algorithms for multirobot task assignment with task deadline constraints. IEEE Trans. Autom. Sci. Eng. 2015, 12, 876-888. [CrossRef]
- Schneider, E.; Sklar, E.I.; Parsons, S. Mechanism selection for multi-robot task allocation. In Proceedings of the Towards Autonomous Robotic Systems: 18th Annual Conference, TAROS 2017, Guildford, UK, \(19-21\) July 2017; Proceedings 18; Springer: Berlin/Heidelberg, Germany, 2017; pp. 421-435.
- Zlot, R.; Stentz, A. Market-based multirobot coordination for complex tasks. Int. J. Robot. Res. 2006, 25, 73-101. [CrossRef]
- Kim, K.S.; Kim, H.Y.; Choi, H.L. A bid-based grouping method for communication-efficient decentralized multi-UAV task allocation. Int. J. Aeronaut. Space Sci. 2020, 21, 290-302. [CrossRef]
- Choi, H.L.; Brunet, L.; How, J.P. Consensus-based decentralized auctions for robust task allocation. IEEE Trans. Robot. 2009, 25, 912-926. [CrossRef]
- Zhao, W.; Meng, Q.; Chung, P.W. A heuristic distributed task allocation method for multivehicle multitask problems and its application to search and rescue scenario. IEEE Trans. Cybern. 2015, 46, 902-915. [CrossRef] [PubMed]
- Smith, R.G. The contract net protocol: High-level communication and control in a distributed problem solver. IEEE Trans. Comput. 1980, 29, 1104-1113. [CrossRef]
- Mitchell, M. An Introduction to Genetic Algorithms; MIT Press: Cambridge, MA, USA, 1998.
- Dorigo, M.; Stützle, T. The ant colony optimization metaheuristic: Algorithms, applications, and advances. In Handbook of Metaheuristics; Springer: Berlin/Heidelberg, Germany, 2003; pp. 250-285.
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN'95-International Conference on Neural Networks, Perth, WA, Australia, 27 November-1 December 1995; Volume 4, pp. 1942-1948.
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization. Technical Report, Technical Report-tr06, Erciyes University, Engineering Faculty, Computer. 2005. Available online: https:/ /abc.erciyes.edu.tr/ pub/tr06_2005.pdf (accessed on 8 December 2024).
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46-61. [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436-444. [CrossRef]
- Diwekar, U.M.; Diwekar, U.M. Optimization under uncertainty. In Introduction to Applied Optimization; Springer Nature: Cham, Switzerland, 2020; pp. 151-215.
- Horling, B.; Lesser, V. A survey of multi-agent organizational paradigms. Knowl. Eng. Rev. 2004, 19, 281-316. [CrossRef]
Disclaimer/Publisher's Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.